In statistics and signal processing, a minimum mean square error (MMSE) estimator is an estimation method which minimizes the mean square error (MSE), which is a common measure of estimator quality, of the fitted values of a dependent variable. In the Bayesian setting, the term MMSE more specifically refers to estimation with quadratic loss function. In such case, the MMSE estimator is given by the posterior mean of the parameter to be estimated. Since the posterior mean is cumbersome to calculate, the form of the MMSE estimator is usually constrained to be within a certain class of functions. Linear MMSE estimators are a popular choice since they are easy to use, easy to calculate, and very versatile. It has given rise to many popular estimators such as the Wiener–Kolmogorov filter and Kalman filter.
Motivation[edit]
The term MMSE more specifically refers to estimation in a Bayesian setting with quadratic cost function. The basic idea behind the Bayesian approach to estimation stems from practical situations where we often have some prior information about the parameter to be estimated. For instance, we may have prior information about the range that the parameter can assume; or we may have an old estimate of the parameter that we want to modify when a new observation is made available; or the statistics of an actual random signal such as speech. This is in contrast to the non-Bayesian approach like minimum-variance unbiased estimator (MVUE) where absolutely nothing is assumed to be known about the parameter in advance and which does not account for such situations. In the Bayesian approach, such prior information is captured by the prior probability density function of the parameters; and based directly on Bayes theorem, it allows us to make better posterior estimates as more observations become available. Thus unlike non-Bayesian approach where parameters of interest are assumed to be deterministic, but unknown constants, the Bayesian estimator seeks to estimate a parameter that is itself a random variable. Furthermore, Bayesian estimation can also deal with situations where the sequence of observations are not necessarily independent. Thus Bayesian estimation provides yet another alternative to the MVUE. This is useful when the MVUE does not exist or cannot be found.
Definition[edit]
Let  be a
be a  hidden random vector variable, and let
hidden random vector variable, and let  be a
be a  known random vector variable (the measurement or observation), both of them not necessarily of the same dimension. An estimator
known random vector variable (the measurement or observation), both of them not necessarily of the same dimension. An estimator  of is any function of the measurement . The estimation error vector is given by
of is any function of the measurement . The estimation error vector is given by  and its mean squared error (MSE) is given by the trace of error covariance matrix
and its mean squared error (MSE) is given by the trace of error covariance matrix

where the expectation  is taken over conditioned on . When is a scalar variable, the MSE expression simplifies to
is taken over conditioned on . When is a scalar variable, the MSE expression simplifies to  . Note that MSE can equivalently be defined in other ways, since
. Note that MSE can equivalently be defined in other ways, since

The MMSE estimator is then defined as the estimator achieving minimal MSE:

Properties[edit]
- When the means and variances are finite, the MMSE estimator is uniquely defined[1] and is given by:
-
- In other words, the MMSE estimator is the conditional expectation of
 given the known observed value of the measurements. Also, since is the posterior mean, the error covariance matrix is equal to the posterior covariance matrix,
given the known observed value of the measurements. Also, since is the posterior mean, the error covariance matrix is equal to the posterior covariance matrix,
- .




- The MMSE estimator is unbiased (under the regularity assumptions mentioned above):

- The MMSE estimator is asymptotically unbiased and it converges in distribution to the normal distribution:
-
- where is the Fisher information of . Thus, the MMSE estimator is asymptotically efficient.


-
- for all in closed, linear subspace of the measurements. For random vectors, since the MSE for estimation of a random vector is the sum of the MSEs of the coordinates, finding the MMSE estimator of a random vector decomposes into finding the MMSE estimators of the coordinates of X separately:
- for all i and j. More succinctly put, the cross-correlation between the minimum estimation error and the estimator should be zero,






Linear MMSE estimator[edit]
In many cases, it is not possible to determine the analytical expression of the MMSE estimator. Two basic numerical approaches to obtain the MMSE estimate depends on either finding the conditional expectation  or finding the minima of MSE. Direct numerical evaluation of the conditional expectation is computationally expensive since it often requires multidimensional integration usually done via Monte Carlo methods. Another computational approach is to directly seek the minima of the MSE using techniques such as the stochastic gradient descent methods ; but this method still requires the evaluation of expectation. While these numerical methods have been fruitful, a closed form expression for the MMSE estimator is nevertheless possible if we are willing to make some compromises.
or finding the minima of MSE. Direct numerical evaluation of the conditional expectation is computationally expensive since it often requires multidimensional integration usually done via Monte Carlo methods. Another computational approach is to directly seek the minima of the MSE using techniques such as the stochastic gradient descent methods ; but this method still requires the evaluation of expectation. While these numerical methods have been fruitful, a closed form expression for the MMSE estimator is nevertheless possible if we are willing to make some compromises.
One possibility is to abandon the full optimality requirements and seek a technique minimizing the MSE within a particular class of estimators, such as the class of linear estimators. Thus, we postulate that the conditional expectation of given is a simple linear function of ,  , where the measurement is a random vector,
, where the measurement is a random vector,  is a matrix and
is a matrix and  is a vector. This can be seen as the first order Taylor approximation of . The linear MMSE estimator is the estimator achieving minimum MSE among all estimators of such form. That is, it solves the following the optimization problem:
is a vector. This can be seen as the first order Taylor approximation of . The linear MMSE estimator is the estimator achieving minimum MSE among all estimators of such form. That is, it solves the following the optimization problem:

One advantage of such linear MMSE estimator is that it is not necessary to explicitly calculate the posterior probability density function of . Such linear estimator only depends on the first two moments of and . So although it may be convenient to assume that and are jointly Gaussian, it is not necessary to make this assumption, so long as the assumed distribution has well defined first and second moments. The form of the linear estimator does not depend on the type of the assumed underlying distribution.
The expression for optimal and is given by:


where  ,
,  the
the  is cross-covariance matrix between and , the
is cross-covariance matrix between and , the  is auto-covariance matrix of .
is auto-covariance matrix of .
Thus, the expression for linear MMSE estimator, its mean, and its auto-covariance is given by



where the  is cross-covariance matrix between and .
is cross-covariance matrix between and .
Lastly, the error covariance and minimum mean square error achievable by such estimator is


Univariate case[edit]
For the special case when both and are scalars, the above relations simplify to


where  is the Pearson’s correlation coefficient between and .
is the Pearson’s correlation coefficient between and .
The above two equations allows us to interpret the correlation coefficient either as normalized slope of linear regression

or as square root of the ratio of two variances
- .

When  , we have
, we have  and
and  . In this case, no new information is gleaned from the measurement which can decrease the uncertainty in . On the other hand, when
. In this case, no new information is gleaned from the measurement which can decrease the uncertainty in . On the other hand, when  , we have
, we have  and
and  . Here is completely determined by , as given by the equation of straight line.
. Here is completely determined by , as given by the equation of straight line.
Computation[edit]
Standard method like Gauss elimination can be used to solve the matrix equation for . A more numerically stable method is provided by QR decomposition method. Since the matrix is a symmetric positive definite matrix, can be solved twice as fast with the Cholesky decomposition, while for large sparse systems conjugate gradient method is more effective. Levinson recursion is a fast method when is also a Toeplitz matrix. This can happen when is a wide sense stationary process. In such stationary cases, these estimators are also referred to as Wiener–Kolmogorov filters.
Linear MMSE estimator for linear observation process[edit]
Let us further model the underlying process of observation as a linear process:  , where
, where  is a known matrix and
is a known matrix and  is random noise vector with the mean
is random noise vector with the mean  and cross-covariance
and cross-covariance  . Here the required mean and the covariance matrices will be
. Here the required mean and the covariance matrices will be



Thus the expression for the linear MMSE estimator matrix further modifies to

Putting everything into the expression for  , we get
, we get

Lastly, the error covariance is

The significant difference between the estimation problem treated above and those of least squares and Gauss–Markov estimate is that the number of observations m, (i.e. the dimension of ) need not be at least as large as the number of unknowns, n, (i.e. the dimension of ). The estimate for the linear observation process exists so long as the m-by-m matrix  exists; this is the case for any m if, for instance,
exists; this is the case for any m if, for instance,  is positive definite. Physically the reason for this property is that since is now a random variable, it is possible to form a meaningful estimate (namely its mean) even with no measurements. Every new measurement simply provides additional information which may modify our original estimate. Another feature of this estimate is that for m < n, there need be no measurement error. Thus, we may have
is positive definite. Physically the reason for this property is that since is now a random variable, it is possible to form a meaningful estimate (namely its mean) even with no measurements. Every new measurement simply provides additional information which may modify our original estimate. Another feature of this estimate is that for m < n, there need be no measurement error. Thus, we may have  , because as long as
, because as long as  is positive definite, the estimate still exists. Lastly, this technique can handle cases where the noise is correlated.
is positive definite, the estimate still exists. Lastly, this technique can handle cases where the noise is correlated.
Alternative form[edit]
An alternative form of expression can be obtained by using the matrix identity

which can be established by post-multiplying by  and pre-multiplying by
and pre-multiplying by  to obtain
to obtain

and

Since can now be written in terms of  as
as  , we get a simplified expression for as
, we get a simplified expression for as

In this form the above expression can be easily compared with weighed least square and Gauss–Markov estimate. In particular, when  , corresponding to infinite variance of the apriori information concerning , the result
, corresponding to infinite variance of the apriori information concerning , the result  is identical to the weighed linear least square estimate with
is identical to the weighed linear least square estimate with  as the weight matrix. Moreover, if the components of are uncorrelated and have equal variance such that
as the weight matrix. Moreover, if the components of are uncorrelated and have equal variance such that  where
where  is an identity matrix, then
is an identity matrix, then  is identical to the ordinary least square estimate.
is identical to the ordinary least square estimate.
Sequential linear MMSE estimation[edit]
In many real-time applications, observational data is not available in a single batch. Instead the observations are made in a sequence. One possible approach is to use the sequential observations to update an old estimate as additional data becomes available, leading to finer estimates. One crucial difference between batch estimation and sequential estimation is that sequential estimation requires an additional Markov assumption.
In the Bayesian framework, such recursive estimation is easily facilitated using Bayes’ rule. Given  observations,
observations,  , Bayes’ rule gives us the posterior density of as
, Bayes’ rule gives us the posterior density of as

The  is called the posterior density,
is called the posterior density,  is called the likelihood function, and
is called the likelihood function, and  is the prior density of k-th time step. Note that the prior density for k-th time step is the posterior density of (k-1)-th time step. This structure allows us to formulate a recursive approach to estimation. Here we have assumed the conditional independence of
is the prior density of k-th time step. Note that the prior density for k-th time step is the posterior density of (k-1)-th time step. This structure allows us to formulate a recursive approach to estimation. Here we have assumed the conditional independence of  from previous observations
from previous observations  given as
given as

This is the Markov assumption.
The MMSE estimate  given the th observation is then the mean of the posterior density . Here, we have implicitly assumed that the statistical properties of does not change with time. In other words, is stationary.
given the th observation is then the mean of the posterior density . Here, we have implicitly assumed that the statistical properties of does not change with time. In other words, is stationary.
In the context of linear MMSE estimator, the formula for the estimate will have the same form as before. However, the mean and covariance matrices of  and
and  will need to be replaced by those of the prior density and likelihood , respectively.
will need to be replaced by those of the prior density and likelihood , respectively.
The mean and covariance matrix of the prior density is given by the previous MMSE estimate,  , and the error covariance matrix,
, and the error covariance matrix,
![{displaystyle C_{X|Y_{1},ldots ,Y_{k-1}}=mathrm {E} [(x-{hat {x}}_{k-1})(x-{hat {x}}_{k-1})^{T}]=C_{e_{k-1}},}](https://wikimedia.org/api/rest_v1/media/math/render/svg/864670362eb4bba0498222e852c5dea705e30bd2)
respectively, as per by the property of MMSE estimators.
Similarly, for the linear observation process, the mean and covariance matrix of the likelihood is given by  and
and
- .
![{displaystyle {begin{aligned}C_{Y_{k}|X}&=mathrm {E} [(y_{k}-{bar {y}}_{k})(y_{k}-{bar {y}}_{k})^{T}]\&=mathrm {E} [(A(x-{bar {x}}_{k-1})+z)(A(x-{bar {x}}_{k-1})+z)^{T}]\&=AC_{e_{k-1}}A^{T}+C_{Z}.end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/ded2fc5f8faaa6b8d3773dd4eb7a2cd27a457463)
The difference between the predicted value of , as given by , and the observed value of gives the prediction error  , which is also referred to as innovation. It is more convenient to represent the linear MMSE in terms of the prediction error, whose mean and covariance are
, which is also referred to as innovation. It is more convenient to represent the linear MMSE in terms of the prediction error, whose mean and covariance are ![{displaystyle mathrm {E} [{tilde {y}}_{k}]=0}](https://wikimedia.org/api/rest_v1/media/math/render/svg/b7333e06de208be900c7d618273db57bf678fb1f) and
and
- .

Hence, in the estimate update formula, we should replace  and
and  by
by  and
and  , respectively. Also, we should replace
, respectively. Also, we should replace  and by
and by  and
and  . Lastly, we replace by
. Lastly, we replace by
![{displaystyle {begin{aligned}C_{e_{k-1}{tilde {Y}}_{k}}&=mathrm {E} [(x-{hat {x}}_{k-1})(y_{k}-{bar {y}}_{k})^{T}]\&=mathrm {E} [(x-{hat {x}}_{k-1})(A(x-{hat {x}}_{k-1})+z)^{T}]\&=C_{e_{k-1}}A^{T}.end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/6e73f96aac3cfb9fa6d74b097374f19dacd8daf7)
Thus, we have the new estimate as

and the new error covariance as

From the point of view of linear algebra, for sequential estimation, if we have an estimate  based on measurements generating space
based on measurements generating space  , then after receiving another set of measurements, we should subtract out from these measurements that part that could be anticipated from the result of the first measurements. In other words, the updating must be based on that part of the new data which is orthogonal to the old data.
, then after receiving another set of measurements, we should subtract out from these measurements that part that could be anticipated from the result of the first measurements. In other words, the updating must be based on that part of the new data which is orthogonal to the old data.
The repeated use of the above two equations as more observations become available lead to recursive estimation techniques. The expressions can be more compactly written as



The matrix  is often referred to as the Kalman gain factor. The alternative formulation of the above algorithm will give
is often referred to as the Kalman gain factor. The alternative formulation of the above algorithm will give


The repetition of these three steps as more data becomes available leads to an iterative estimation algorithm. The generalization of this idea to non-stationary cases gives rise to the Kalman filter. The three update steps outlined above indeed form the update step of the Kalman filter.
Special case: scalar observations[edit]
As an important special case, an easy to use recursive expression can be derived when at each k-th time instant the underlying linear observation process yields a scalar such that  , where
, where  is n-by-1 known column vector whose values can change with time,
is n-by-1 known column vector whose values can change with time,  is n-by-1 random column vector to be estimated, and
is n-by-1 random column vector to be estimated, and  is scalar noise term with variance
is scalar noise term with variance  . After (k+1)-th observation, the direct use of above recursive equations give the expression for the estimate
. After (k+1)-th observation, the direct use of above recursive equations give the expression for the estimate  as:
as:

where  is the new scalar observation and the gain factor
is the new scalar observation and the gain factor  is n-by-1 column vector given by
is n-by-1 column vector given by

The  is n-by-n error covariance matrix given by
is n-by-n error covariance matrix given by

Here, no matrix inversion is required. Also, the gain factor, , depends on our confidence in the new data sample, as measured by the noise variance, versus that in the previous data. The initial values of and are taken to be the mean and covariance of the aprior probability density function of .
Alternative approaches: This important special case has also given rise to many other iterative methods (or adaptive filters), such as the least mean squares filter and recursive least squares filter, that directly solves the original MSE optimization problem using stochastic gradient descents. However, since the estimation error  cannot be directly observed, these methods try to minimize the mean squared prediction error
cannot be directly observed, these methods try to minimize the mean squared prediction error  . For instance, in the case of scalar observations, we have the gradient
. For instance, in the case of scalar observations, we have the gradient  Thus, the update equation for the least mean square filter is given by
Thus, the update equation for the least mean square filter is given by

where  is the scalar step size and the expectation is approximated by the instantaneous value
is the scalar step size and the expectation is approximated by the instantaneous value  . As we can see, these methods bypass the need for covariance matrices.
. As we can see, these methods bypass the need for covariance matrices.
Examples[edit]
Example 1[edit]
We shall take a linear prediction problem as an example. Let a linear combination of observed scalar random variables  and
and  be used to estimate another future scalar random variable
be used to estimate another future scalar random variable  such that
such that  . If the random variables
. If the random variables ![{displaystyle z=[z_{1},z_{2},z_{3},z_{4}]^{T}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/45cb1f9123fdf786074088616e42dfbcc1359d07) are real Gaussian random variables with zero mean and its covariance matrix given by
are real Gaussian random variables with zero mean and its covariance matrix given by
![{displaystyle operatorname {cov} (Z)=operatorname {E} [zz^{T}]=left[{begin{array}{cccc}1&2&3&4\2&5&8&9\3&8&6&10\4&9&10&15end{array}}right],}](https://wikimedia.org/api/rest_v1/media/math/render/svg/90889a9de7192d317decb8381ca25cda49892b5c)
then our task is to find the coefficients  such that it will yield an optimal linear estimate
such that it will yield an optimal linear estimate  .
.
In terms of the terminology developed in the previous sections, for this problem we have the observation vector ![{displaystyle y=[z_{1},z_{2},z_{3}]^{T}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/7fdeb8eb600c7a066561d28e2b3f32fb5b1572b9) , the estimator matrix
, the estimator matrix ![W=[w_{1},w_{2},w_{3}]](https://wikimedia.org/api/rest_v1/media/math/render/svg/dd8e9343b228a9044dbb8208e9ceeb31270b04c1) as a row vector, and the estimated variable
as a row vector, and the estimated variable  as a scalar quantity. The autocorrelation matrix is defined as
as a scalar quantity. The autocorrelation matrix is defined as
![{displaystyle C_{Y}=left[{begin{array}{ccc}E[z_{1},z_{1}]&E[z_{2},z_{1}]&E[z_{3},z_{1}]\E[z_{1},z_{2}]&E[z_{2},z_{2}]&E[z_{3},z_{2}]\E[z_{1},z_{3}]&E[z_{2},z_{3}]&E[z_{3},z_{3}]end{array}}right]=left[{begin{array}{ccc}1&2&3\2&5&8\3&8&6end{array}}right].}](https://wikimedia.org/api/rest_v1/media/math/render/svg/50c0831c4af6cc131c13cd4da73e21ee08aac40c)
The cross correlation matrix is defined as
![{displaystyle C_{YX}=left[{begin{array}{c}E[z_{4},z_{1}]\E[z_{4},z_{2}]\E[z_{4},z_{3}]end{array}}right]=left[{begin{array}{c}4\9\10end{array}}right].}](https://wikimedia.org/api/rest_v1/media/math/render/svg/e0b4e00619f85de1c0967817d68b6b154557af03)
We now solve the equation  by inverting and pre-multiplying to get
by inverting and pre-multiplying to get
![{displaystyle C_{Y}^{-1}C_{YX}=left[{begin{array}{ccc}4.85&-1.71&-0.142\-1.71&0.428&0.2857\-0.142&0.2857&-0.1429end{array}}right]left[{begin{array}{c}4\9\10end{array}}right]=left[{begin{array}{c}2.57\-0.142\0.5714end{array}}right]=W^{T}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/8f29d9505d5f630feae8a4566c23bae8dd82fd5d)
So we have 
 and
and 
as the optimal coefficients for . Computing the minimum
mean square error then gives ![{displaystyle leftVert erightVert _{min }^{2}=operatorname {E} [z_{4}z_{4}]-WC_{YX}=15-WC_{YX}=.2857}](https://wikimedia.org/api/rest_v1/media/math/render/svg/44558ab7a0b5ead1b9571853096d800773b38877) .[2] Note that it is not necessary to obtain an explicit matrix inverse of to compute the value of . The matrix equation can be solved by well known methods such as Gauss elimination method. A shorter, non-numerical example can be found in orthogonality principle.
.[2] Note that it is not necessary to obtain an explicit matrix inverse of to compute the value of . The matrix equation can be solved by well known methods such as Gauss elimination method. A shorter, non-numerical example can be found in orthogonality principle.
Example 2[edit]
Consider a vector formed by taking  observations of a fixed but unknown scalar parameter disturbed by white Gaussian noise. We can describe the process by a linear equation
observations of a fixed but unknown scalar parameter disturbed by white Gaussian noise. We can describe the process by a linear equation  , where
, where ![1=[1,1,ldots ,1]^{T}](https://wikimedia.org/api/rest_v1/media/math/render/svg/43fec89f837a5e8d53869fb49ec95a9e56a788f0) . Depending on context it will be clear if
. Depending on context it will be clear if  represents a scalar or a vector. Suppose that we know
represents a scalar or a vector. Suppose that we know ![[-x_{0},x_{0}]](https://wikimedia.org/api/rest_v1/media/math/render/svg/e79873ca5ddfd5d6b0168f6373b33c8bc3756c69) to be the range within which the value of is going to fall in. We can model our uncertainty of by an aprior uniform distribution over an interval , and thus will have variance of
to be the range within which the value of is going to fall in. We can model our uncertainty of by an aprior uniform distribution over an interval , and thus will have variance of  . Let the noise vector be normally distributed as
. Let the noise vector be normally distributed as  where is an identity matrix. Also and are independent and . It is easy to see that
where is an identity matrix. Also and are independent and . It is easy to see that

Thus, the linear MMSE estimator is given by

We can simplify the expression by using the alternative form for as

where for ![y=[y_{1},y_{2},ldots ,y_{N}]^{T}](https://wikimedia.org/api/rest_v1/media/math/render/svg/8317c7045e5b1318cec0c4ee89727a02cdeecafc) we have
we have 
Similarly, the variance of the estimator is

Thus the MMSE of this linear estimator is

For very large , we see that the MMSE estimator of a scalar with uniform aprior distribution can be approximated by the arithmetic average of all the observed data

while the variance will be unaffected by data  and the LMMSE of the estimate will tend to zero.
and the LMMSE of the estimate will tend to zero.
However, the estimator is suboptimal since it is constrained to be linear. Had the random variable also been Gaussian, then the estimator would have been optimal. Notice, that the form of the estimator will remain unchanged, regardless of the apriori distribution of , so long as the mean and variance of these distributions are the same.
Example 3[edit]
Consider a variation of the above example: Two candidates are standing for an election. Let the fraction of votes that a candidate will receive on an election day be ![xin [0,1].](https://wikimedia.org/api/rest_v1/media/math/render/svg/1c44eb6b4643a03d3c166df0e61c4925b6d4d4f0) Thus the fraction of votes the other candidate will receive will be
Thus the fraction of votes the other candidate will receive will be  We shall take as a random variable with a uniform prior distribution over
We shall take as a random variable with a uniform prior distribution over ![[0,1]](https://wikimedia.org/api/rest_v1/media/math/render/svg/738f7d23bb2d9642bab520020873cccbef49768d) so that its mean is
so that its mean is  and variance is
and variance is  A few weeks before the election, two independent public opinion polls were conducted by two different pollsters. The first poll revealed that the candidate is likely to get
A few weeks before the election, two independent public opinion polls were conducted by two different pollsters. The first poll revealed that the candidate is likely to get  fraction of votes. Since some error is always present due to finite sampling and the particular polling methodology adopted, the first pollster declares their estimate to have an error
fraction of votes. Since some error is always present due to finite sampling and the particular polling methodology adopted, the first pollster declares their estimate to have an error  with zero mean and variance
with zero mean and variance  Similarly, the second pollster declares their estimate to be
Similarly, the second pollster declares their estimate to be  with an error
with an error  with zero mean and variance
with zero mean and variance  Note that except for the mean and variance of the error, the error distribution is unspecified. How should the two polls be combined to obtain the voting prediction for the given candidate?
Note that except for the mean and variance of the error, the error distribution is unspecified. How should the two polls be combined to obtain the voting prediction for the given candidate?
As with previous example, we have

Here, both the  . Thus, we can obtain the LMMSE estimate as the linear combination of and as
. Thus, we can obtain the LMMSE estimate as the linear combination of and as

where the weights are given by

Here, since the denominator term is constant, the poll with lower error is given higher weight in order to predict the election outcome. Lastly, the variance of is given by

which makes  smaller than
smaller than  Thus, the LMMSE is given by
Thus, the LMMSE is given by

In general, if we have pollsters, then  where the weight for i-th pollster is given by
where the weight for i-th pollster is given by  and the LMMSE is given by
and the LMMSE is given by 
Example 4[edit]
Suppose that a musician is playing an instrument and that the sound is received by two microphones, each of them located at two different places. Let the attenuation of sound due to distance at each microphone be  and
and  , which are assumed to be known constants. Similarly, let the noise at each microphone be and , each with zero mean and variances
, which are assumed to be known constants. Similarly, let the noise at each microphone be and , each with zero mean and variances  and
and  respectively. Let denote the sound produced by the musician, which is a random variable with zero mean and variance How should the recorded music from these two microphones be combined, after being synced with each other?
respectively. Let denote the sound produced by the musician, which is a random variable with zero mean and variance How should the recorded music from these two microphones be combined, after being synced with each other?
We can model the sound received by each microphone as

Here both the  . Thus, we can combine the two sounds as
. Thus, we can combine the two sounds as

where the i-th weight is given as

See also[edit]
- Bayesian estimator
- Mean squared error
- Least squares
- Minimum-variance unbiased estimator (MVUE)
- Orthogonality principle
- Wiener filter
- Kalman filter
- Linear prediction
- Zero-forcing equalizer
Notes[edit]
- ^ «Mean Squared Error (MSE)». www.probabilitycourse.com. Retrieved 9 May 2017.
- ^ Moon and Stirling.
Further reading[edit]
- Johnson, D. «Minimum Mean Squared Error Estimators». Connexions. Archived from Minimum Mean Squared Error Estimators the original on 25 July 2008. Retrieved 8 January 2013.
- Jaynes, E.T. (2003). Probability Theory: The Logic of Science. Cambridge University Press. ISBN 978-0521592710.
- Bibby, J.; Toutenburg, H. (1977). Prediction and Improved Estimation in Linear Models. Wiley. ISBN 9780471016564.
- Lehmann, E. L.; Casella, G. (1998). «Chapter 4». Theory of Point Estimation (2nd ed.). Springer. ISBN 0-387-98502-6.
- Kay, S. M. (1993). Fundamentals of Statistical Signal Processing: Estimation Theory. Prentice Hall. pp. 344–350. ISBN 0-13-042268-1.
- Luenberger, D.G. (1969). «Chapter 4, Least-squares estimation». Optimization by Vector Space Methods (1st ed.). Wiley. ISBN 978-0471181170.
- Moon, T.K.; Stirling, W.C. (2000). Mathematical Methods and Algorithms for Signal Processing (1st ed.). Prentice Hall. ISBN 978-0201361865.
- Van Trees, H. L. (1968). Detection, Estimation, and Modulation Theory, Part I. New York: Wiley. ISBN 0-471-09517-6.
- Haykin, S.O. (2013). Adaptive Filter Theory (5th ed.). Prentice Hall. ISBN 978-0132671453.
In statistics and signal processing, a minimum mean square error (MMSE) estimator is an estimation method which minimizes the mean square error (MSE), which is a common measure of estimator quality, of the fitted values of a dependent variable. In the Bayesian setting, the term MMSE more specifically refers to estimation with quadratic loss function. In such case, the MMSE estimator is given by the posterior mean of the parameter to be estimated. Since the posterior mean is cumbersome to calculate, the form of the MMSE estimator is usually constrained to be within a certain class of functions. Linear MMSE estimators are a popular choice since they are easy to use, easy to calculate, and very versatile. It has given rise to many popular estimators such as the Wiener–Kolmogorov filter and Kalman filter.
Motivation[edit]
The term MMSE more specifically refers to estimation in a Bayesian setting with quadratic cost function. The basic idea behind the Bayesian approach to estimation stems from practical situations where we often have some prior information about the parameter to be estimated. For instance, we may have prior information about the range that the parameter can assume; or we may have an old estimate of the parameter that we want to modify when a new observation is made available; or the statistics of an actual random signal such as speech. This is in contrast to the non-Bayesian approach like minimum-variance unbiased estimator (MVUE) where absolutely nothing is assumed to be known about the parameter in advance and which does not account for such situations. In the Bayesian approach, such prior information is captured by the prior probability density function of the parameters; and based directly on Bayes theorem, it allows us to make better posterior estimates as more observations become available. Thus unlike non-Bayesian approach where parameters of interest are assumed to be deterministic, but unknown constants, the Bayesian estimator seeks to estimate a parameter that is itself a random variable. Furthermore, Bayesian estimation can also deal with situations where the sequence of observations are not necessarily independent. Thus Bayesian estimation provides yet another alternative to the MVUE. This is useful when the MVUE does not exist or cannot be found.
Definition[edit]
Let be a hidden random vector variable, and let be a known random vector variable (the measurement or observation), both of them not necessarily of the same dimension. An estimator of is any function of the measurement . The estimation error vector is given by and its mean squared error (MSE) is given by the trace of error covariance matrix
where the expectation is taken over conditioned on . When is a scalar variable, the MSE expression simplifies to . Note that MSE can equivalently be defined in other ways, since
The MMSE estimator is then defined as the estimator achieving minimal MSE:
Properties[edit]
- When the means and variances are finite, the MMSE estimator is uniquely defined[1] and is given by:
-
- In other words, the MMSE estimator is the conditional expectation of given the known observed value of the measurements. Also, since is the posterior mean, the error covariance matrix is equal to the posterior covariance matrix,
- .
- The MMSE estimator is unbiased (under the regularity assumptions mentioned above):
- The MMSE estimator is asymptotically unbiased and it converges in distribution to the normal distribution:
-
- where is the Fisher information of . Thus, the MMSE estimator is asymptotically efficient.
-
- for all in closed, linear subspace of the measurements. For random vectors, since the MSE for estimation of a random vector is the sum of the MSEs of the coordinates, finding the MMSE estimator of a random vector decomposes into finding the MMSE estimators of the coordinates of X separately:
- for all i and j. More succinctly put, the cross-correlation between the minimum estimation error and the estimator should be zero,
Linear MMSE estimator[edit]
In many cases, it is not possible to determine the analytical expression of the MMSE estimator. Two basic numerical approaches to obtain the MMSE estimate depends on either finding the conditional expectation or finding the minima of MSE. Direct numerical evaluation of the conditional expectation is computationally expensive since it often requires multidimensional integration usually done via Monte Carlo methods. Another computational approach is to directly seek the minima of the MSE using techniques such as the stochastic gradient descent methods ; but this method still requires the evaluation of expectation. While these numerical methods have been fruitful, a closed form expression for the MMSE estimator is nevertheless possible if we are willing to make some compromises.
One possibility is to abandon the full optimality requirements and seek a technique minimizing the MSE within a particular class of estimators, such as the class of linear estimators. Thus, we postulate that the conditional expectation of given is a simple linear function of , , where the measurement is a random vector, is a matrix and is a vector. This can be seen as the first order Taylor approximation of . The linear MMSE estimator is the estimator achieving minimum MSE among all estimators of such form. That is, it solves the following the optimization problem:
One advantage of such linear MMSE estimator is that it is not necessary to explicitly calculate the posterior probability density function of . Such linear estimator only depends on the first two moments of and . So although it may be convenient to assume that and are jointly Gaussian, it is not necessary to make this assumption, so long as the assumed distribution has well defined first and second moments. The form of the linear estimator does not depend on the type of the assumed underlying distribution.
The expression for optimal and is given by:
where , the is cross-covariance matrix between and , the is auto-covariance matrix of .
Thus, the expression for linear MMSE estimator, its mean, and its auto-covariance is given by
where the is cross-covariance matrix between and .
Lastly, the error covariance and minimum mean square error achievable by such estimator is
Univariate case[edit]
For the special case when both and are scalars, the above relations simplify to
where is the Pearson’s correlation coefficient between and .
The above two equations allows us to interpret the correlation coefficient either as normalized slope of linear regression
or as square root of the ratio of two variances
- .
When , we have and . In this case, no new information is gleaned from the measurement which can decrease the uncertainty in . On the other hand, when , we have and . Here is completely determined by , as given by the equation of straight line.
Computation[edit]
Standard method like Gauss elimination can be used to solve the matrix equation for . A more numerically stable method is provided by QR decomposition method. Since the matrix is a symmetric positive definite matrix, can be solved twice as fast with the Cholesky decomposition, while for large sparse systems conjugate gradient method is more effective. Levinson recursion is a fast method when is also a Toeplitz matrix. This can happen when is a wide sense stationary process. In such stationary cases, these estimators are also referred to as Wiener–Kolmogorov filters.
Linear MMSE estimator for linear observation process[edit]
Let us further model the underlying process of observation as a linear process: , where is a known matrix and is random noise vector with the mean and cross-covariance . Here the required mean and the covariance matrices will be
Thus the expression for the linear MMSE estimator matrix further modifies to
Putting everything into the expression for , we get
Lastly, the error covariance is
The significant difference between the estimation problem treated above and those of least squares and Gauss–Markov estimate is that the number of observations m, (i.e. the dimension of ) need not be at least as large as the number of unknowns, n, (i.e. the dimension of ). The estimate for the linear observation process exists so long as the m-by-m matrix exists; this is the case for any m if, for instance, is positive definite. Physically the reason for this property is that since is now a random variable, it is possible to form a meaningful estimate (namely its mean) even with no measurements. Every new measurement simply provides additional information which may modify our original estimate. Another feature of this estimate is that for m < n, there need be no measurement error. Thus, we may have , because as long as is positive definite, the estimate still exists. Lastly, this technique can handle cases where the noise is correlated.
Alternative form[edit]
An alternative form of expression can be obtained by using the matrix identity
which can be established by post-multiplying by and pre-multiplying by to obtain
and
Since can now be written in terms of as , we get a simplified expression for as
In this form the above expression can be easily compared with weighed least square and Gauss–Markov estimate. In particular, when , corresponding to infinite variance of the apriori information concerning , the result is identical to the weighed linear least square estimate with as the weight matrix. Moreover, if the components of are uncorrelated and have equal variance such that where is an identity matrix, then is identical to the ordinary least square estimate.
Sequential linear MMSE estimation[edit]
In many real-time applications, observational data is not available in a single batch. Instead the observations are made in a sequence. One possible approach is to use the sequential observations to update an old estimate as additional data becomes available, leading to finer estimates. One crucial difference between batch estimation and sequential estimation is that sequential estimation requires an additional Markov assumption.
In the Bayesian framework, such recursive estimation is easily facilitated using Bayes’ rule. Given observations, , Bayes’ rule gives us the posterior density of as
The is called the posterior density, is called the likelihood function, and is the prior density of k-th time step. Note that the prior density for k-th time step is the posterior density of (k-1)-th time step. This structure allows us to formulate a recursive approach to estimation. Here we have assumed the conditional independence of from previous observations given as
This is the Markov assumption.
The MMSE estimate given the th observation is then the mean of the posterior density . Here, we have implicitly assumed that the statistical properties of does not change with time. In other words, is stationary.
In the context of linear MMSE estimator, the formula for the estimate will have the same form as before. However, the mean and covariance matrices of and will need to be replaced by those of the prior density and likelihood , respectively.
The mean and covariance matrix of the prior density is given by the previous MMSE estimate, , and the error covariance matrix,
respectively, as per by the property of MMSE estimators.
Similarly, for the linear observation process, the mean and covariance matrix of the likelihood is given by and
- .
The difference between the predicted value of , as given by , and the observed value of gives the prediction error , which is also referred to as innovation. It is more convenient to represent the linear MMSE in terms of the prediction error, whose mean and covariance are and
- .
Hence, in the estimate update formula, we should replace and by and , respectively. Also, we should replace and by and . Lastly, we replace by
Thus, we have the new estimate as
and the new error covariance as
From the point of view of linear algebra, for sequential estimation, if we have an estimate based on measurements generating space , then after receiving another set of measurements, we should subtract out from these measurements that part that could be anticipated from the result of the first measurements. In other words, the updating must be based on that part of the new data which is orthogonal to the old data.
The repeated use of the above two equations as more observations become available lead to recursive estimation techniques. The expressions can be more compactly written as
The matrix is often referred to as the Kalman gain factor. The alternative formulation of the above algorithm will give
The repetition of these three steps as more data becomes available leads to an iterative estimation algorithm. The generalization of this idea to non-stationary cases gives rise to the Kalman filter. The three update steps outlined above indeed form the update step of the Kalman filter.
Special case: scalar observations[edit]
As an important special case, an easy to use recursive expression can be derived when at each k-th time instant the underlying linear observation process yields a scalar such that , where is n-by-1 known column vector whose values can change with time, is n-by-1 random column vector to be estimated, and is scalar noise term with variance . After (k+1)-th observation, the direct use of above recursive equations give the expression for the estimate as:
where is the new scalar observation and the gain factor is n-by-1 column vector given by
The is n-by-n error covariance matrix given by
Here, no matrix inversion is required. Also, the gain factor, , depends on our confidence in the new data sample, as measured by the noise variance, versus that in the previous data. The initial values of and are taken to be the mean and covariance of the aprior probability density function of .
Alternative approaches: This important special case has also given rise to many other iterative methods (or adaptive filters), such as the least mean squares filter and recursive least squares filter, that directly solves the original MSE optimization problem using stochastic gradient descents. However, since the estimation error cannot be directly observed, these methods try to minimize the mean squared prediction error . For instance, in the case of scalar observations, we have the gradient Thus, the update equation for the least mean square filter is given by
where is the scalar step size and the expectation is approximated by the instantaneous value . As we can see, these methods bypass the need for covariance matrices.
Examples[edit]
Example 1[edit]
We shall take a linear prediction problem as an example. Let a linear combination of observed scalar random variables and be used to estimate another future scalar random variable such that . If the random variables are real Gaussian random variables with zero mean and its covariance matrix given by
then our task is to find the coefficients such that it will yield an optimal linear estimate .
In terms of the terminology developed in the previous sections, for this problem we have the observation vector , the estimator matrix as a row vector, and the estimated variable as a scalar quantity. The autocorrelation matrix is defined as
The cross correlation matrix is defined as
We now solve the equation by inverting and pre-multiplying to get
So we have and
as the optimal coefficients for . Computing the minimum
mean square error then gives .[2] Note that it is not necessary to obtain an explicit matrix inverse of to compute the value of . The matrix equation can be solved by well known methods such as Gauss elimination method. A shorter, non-numerical example can be found in orthogonality principle.
Example 2[edit]
Consider a vector formed by taking observations of a fixed but unknown scalar parameter disturbed by white Gaussian noise. We can describe the process by a linear equation , where . Depending on context it will be clear if represents a scalar or a vector. Suppose that we know to be the range within which the value of is going to fall in. We can model our uncertainty of by an aprior uniform distribution over an interval , and thus will have variance of . Let the noise vector be normally distributed as where is an identity matrix. Also and are independent and . It is easy to see that
Thus, the linear MMSE estimator is given by
We can simplify the expression by using the alternative form for as
where for we have
Similarly, the variance of the estimator is
Thus the MMSE of this linear estimator is
For very large , we see that the MMSE estimator of a scalar with uniform aprior distribution can be approximated by the arithmetic average of all the observed data
while the variance will be unaffected by data and the LMMSE of the estimate will tend to zero.
However, the estimator is suboptimal since it is constrained to be linear. Had the random variable also been Gaussian, then the estimator would have been optimal. Notice, that the form of the estimator will remain unchanged, regardless of the apriori distribution of , so long as the mean and variance of these distributions are the same.
Example 3[edit]
Consider a variation of the above example: Two candidates are standing for an election. Let the fraction of votes that a candidate will receive on an election day be Thus the fraction of votes the other candidate will receive will be We shall take as a random variable with a uniform prior distribution over so that its mean is and variance is A few weeks before the election, two independent public opinion polls were conducted by two different pollsters. The first poll revealed that the candidate is likely to get fraction of votes. Since some error is always present due to finite sampling and the particular polling methodology adopted, the first pollster declares their estimate to have an error with zero mean and variance Similarly, the second pollster declares their estimate to be with an error with zero mean and variance Note that except for the mean and variance of the error, the error distribution is unspecified. How should the two polls be combined to obtain the voting prediction for the given candidate?
As with previous example, we have
Here, both the . Thus, we can obtain the LMMSE estimate as the linear combination of and as
where the weights are given by
Here, since the denominator term is constant, the poll with lower error is given higher weight in order to predict the election outcome. Lastly, the variance of is given by
which makes smaller than Thus, the LMMSE is given by
In general, if we have pollsters, then where the weight for i-th pollster is given by and the LMMSE is given by
Example 4[edit]
Suppose that a musician is playing an instrument and that the sound is received by two microphones, each of them located at two different places. Let the attenuation of sound due to distance at each microphone be and , which are assumed to be known constants. Similarly, let the noise at each microphone be and , each with zero mean and variances and respectively. Let denote the sound produced by the musician, which is a random variable with zero mean and variance How should the recorded music from these two microphones be combined, after being synced with each other?
We can model the sound received by each microphone as
Here both the . Thus, we can combine the two sounds as
where the i-th weight is given as
See also[edit]
- Bayesian estimator
- Mean squared error
- Least squares
- Minimum-variance unbiased estimator (MVUE)
- Orthogonality principle
- Wiener filter
- Kalman filter
- Linear prediction
- Zero-forcing equalizer
Notes[edit]
- ^ «Mean Squared Error (MSE)». www.probabilitycourse.com. Retrieved 9 May 2017.
- ^ Moon and Stirling.
Further reading[edit]
- Johnson, D. «Minimum Mean Squared Error Estimators». Connexions. Archived from Minimum Mean Squared Error Estimators the original on 25 July 2008. Retrieved 8 January 2013.
- Jaynes, E.T. (2003). Probability Theory: The Logic of Science. Cambridge University Press. ISBN 978-0521592710.
- Bibby, J.; Toutenburg, H. (1977). Prediction and Improved Estimation in Linear Models. Wiley. ISBN 9780471016564.
- Lehmann, E. L.; Casella, G. (1998). «Chapter 4». Theory of Point Estimation (2nd ed.). Springer. ISBN 0-387-98502-6.
- Kay, S. M. (1993). Fundamentals of Statistical Signal Processing: Estimation Theory. Prentice Hall. pp. 344–350. ISBN 0-13-042268-1.
- Luenberger, D.G. (1969). «Chapter 4, Least-squares estimation». Optimization by Vector Space Methods (1st ed.). Wiley. ISBN 978-0471181170.
- Moon, T.K.; Stirling, W.C. (2000). Mathematical Methods and Algorithms for Signal Processing (1st ed.). Prentice Hall. ISBN 978-0201361865.
- Van Trees, H. L. (1968). Detection, Estimation, and Modulation Theory, Part I. New York: Wiley. ISBN 0-471-09517-6.
- Haykin, S.O. (2013). Adaptive Filter Theory (5th ed.). Prentice Hall. ISBN 978-0132671453.
Во время синтеза
системы может оказаться ситуация, при
которой два сигнала: сигнал управления
и сигналы возмущения, оба имеют случайный
характер. В таком случае принципиальная
задача синтеза системы: определить
параметры системы, доставляющие минимум
средней квадратической ошибки, значение
которой определяется с помощью следующего
выражения:
![]()
Можно
обеспечить этот минимум двумя путями:
-
осуществить
параметрический синтез, то-есть,
определить параметры системы, без
изменения её структуры, доставляющие
минимум

-
определить
структуру и параметры системы,
обеспечивающие минимум

(структурно-параметрический синтез).
Параметрический
синтез
осуществляется в следующей
последовательности.
1.Определение
корреляционной функции полезного
сигнала и сигнала возмущения по
практическим экспериментальным данным.
Затем делаем прямое преобразование
Фурье корреляционных функций и приходим
к спектральным плотностям:
![]()
Учитывая, что
![]()
— функция четная и что
![]() ,
,
получаем
![]()
2.
Рассчитываем передаточные функции
системы с обратной связью для ошибки ,
вызванной случайным сигналом управления
![]()
и возмущающим воздействием
![]()
3. Используя
соответствующие выражения, рассчитываем
спектральную плотность общей ошибки
![]()
4. Определяем
дисперсию ошибки по выражению
Парсеваля как
функцию параметров системы
![]() где
где
![]() ,
,
![]() ,
,
— коэффициенты и постоянные времени
элементов системы.
5. Определяем
числовые значения параметров, решая
систему уравнений
![]()
6. Подставляя
числовые значения параметров, определенных
в п.5, в выражение
![]() ,
,
получаем
![]() и
и
среднеквадратичную ошибку
![]()
Если
![]()
где
![]()
— допустимая ошибка,
означает, что
задача решена. Если неравенство не
выполняется, необходимо приниматься
за структурно-параметрический синтез
системы.
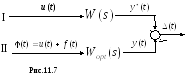
Структурно-параметрический
синтез выполняется
на базе метода оптимальной фильтрации
Винера. Презентация
метода
делается
на
рис.11.7.
Здесь:
канал I
– осуществляет желаемую передачу
входного сигнала
![]() по
по
следующему выражению:
![]()
Второй канал II
– передача, осуществляемая оптимальной
системой
![]() ,
,
в присутствии
![]()
В связи с этим ошибка системы![]()
должна удовлетворять критерию
![]()
Можно рассматривать
систему
![]()
как оптимальный фильтр сигнала
![]() .
.![]()
Прежде, чем решать
предложенную задачу, рассмотрим
зависимость между корреляционными
функциями сигналов на входе и на выходе
![]()
Запишем выражение взаимной корреляционной
функции:
![]()
![]() .
.
Используя выражение
![]() ,
,
приходим к следующей форме :
![]()
Или изменяя
последовательность интегрирования,
имеем
![]() .
.
Полученное выражение
называется уравнением Винера- Хопфа.
Используя
прямое преобразование Фурье, приходим
к замечательному выражению
![]() .
.
Заметим, что
полученное выражение позволяет определить
частотный образ системы![]()
по реализациям сигналов на входе и на
выходе (результаты пассивного
эксперимента), то-есть, без активного
вмешательства в исследуемый процесс:
![]() .
.
Определим дисперсию
ошибки, учитывая
![]() :
:
![]() .
.
Норберт Винер
доказал , что условием необходимым и
достаточным минимума![]() является
является
то, что функция веса
![]() должна
должна
быть решением уравнения Винера-Хопфа:
![]() .
.
Имеем тогда,
![]()
Но частотные
характеристики, определенные по этому
выражению
![]()
в большинстве практических случаях
имеют нереализуемые свойства, так как
система с
![]()
будет неустойчивой.
В этой связи для
отыскания оптимальной функции
![]() ,
,
удовлетворяющей условиям устойчивости,
применяют разложение
![]()
на комплексные множители:
![]()
Из этого
следует, что
![]() .
.
Н Винер доказал,
что можно определить оптимальную
передаточную функцию следующим образом:
![]()
где
![]() ;
;
![]()
Exemple
определения
![]() .
.
Пусть спектральная
плотность управляющего сигнала
![]()
а у помехи типа белого шума
![]() Причем, известно, что
Причем, известно, что
![]()
не коррелированны. Необходимо найти
![]()
следящей системы.
Решение
Для следящей системы
![]()
Поэтому
![]()
Учитывая, что
![]() ,
,
можно написать:
![]()
принято в рассмотрение
здесь, что
![]()
как для сигналов, которые не коррелированны.
Подставляя известные выражения
спектральной плотности, полученные
выше, получаем в нашем случае:
![]()
Разложим последнее
выражение на сопряженные множители:
![]()
Вычисляем
в соответствии с ранее написанными
выражениями:
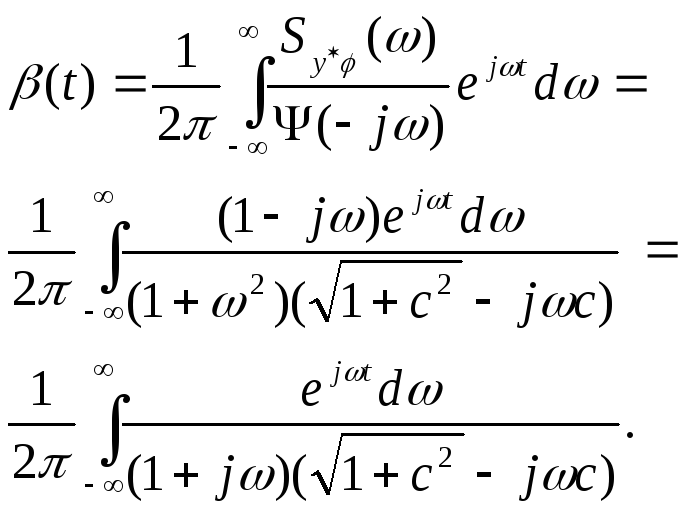
Разложив функцию
под знаком интеграла на простые дроби,
получаем
![]()
Для вычисления
![]()
необходимо взять прямое преобразование
Фурье
![]()
которое, в свою очередь, результат
обратного преобразования Фурье выражения,
стоящего в квадратных скобках.
Следовательно,
![]()
будет равен этому выражению в квадратных
скобках. Исходя из условий реализуемости
![]() ,
,
отбрасываем слагаемые подынтегральной
функции , имеющей корни в правой
полуплоскости. Тогда
![]() .
.
Искомая передаточная
функция примет вид
или
![]() ,
,
где
![]()
Таким образом,
оптимальный фильтр в данном случае
представляет собой апериодическое
звено первого порядка.
В
заключение заметим, что решение задачи
оптимальной фильтрации может быть также
произведено с помощью фильтра Калмана.
В этом методе предполагается, что на
вход системы поступает аддитивная смесь
управляющего воздействия![]() и
и
случайного процесса Маркова и помеха
![]() ,
,
представляющая собой гауссовский
«белый» шум. Сигналы
![]()
и
![]()
не коррелированны. Физически
реализуемый
линейный оператор замкнутой системы,
при котором процесс
![]()
на выходе системы является оптимальным
по критерию
минимума
среднеквадратической ошибки, находится
по специально разработанному алгоритму.
Этот алгоритм достаточно громоздок и,
в частности, связан с решением
дифференциального уравнения
Риккатти, для чего,
как правило, требуется применять
численные
методы с использованием
компьютерных технологий. В конечном
итоге, алгоритм
Калмана дает тот же результат, что и
алгоритм
Винера, но в отличие
от последнего, позволяет синтезировать
оптимальные фильтры не только для
установившегося, но и для переходного
режимов, при случайных нестационарных
входных воздействиях.
189
Соседние файлы в папке Лекции по ТАУ-11-мин
- #
- #
- #
- #
- #
- #
Алгоритм минимизации среднеквадратнческой ошибки 18$ где Й,, ‘ — обратная матрица для матрицы корреляции К„. Вектор весовых коэффици- ентов хч, называют Винеровским решением линейной задачи оптимальной фильтрации в честь Норберта Винера (ЯогЬеп %1епег), который внес весомый вющд в ее решение 1434), 11144). Исходя из этого, можно сформулировать следующее утверждение. Дхя эргодического процесса линейный филыпр, построенный по методу наименьших квадратов, асимптотически сходится к фильтру Винера по мере приблиэсения кали- честеа наблюдений к бесконечности. 3.6.
Алгоритм минимизации среднеквадратической ошибки Алгоршпм минимизации среднеквадратической ошибки (!еазпшеап-зцпаге — 1.МБ) основан на использовании дискретных значений функции стоимости: Е(хч) = — ез(п), 2 (3.33) где е(п) — сигнал ошибки, измеренный в момент времени и. Дифференцируя Е(зч) по вектору весов зч, получим: д Е(хч) д е(п) дш дчг = е(п) —. (3.34) Как и в случае линейного фильтра, построенного по методу наименьших квадратов, алгоритм минимизации среднеквадратической ошибки работает с линейным нейроном. Исходя из этого, сигнал ошибки можно записать в следующем виде: е(п) = а(п) — х (п)зч(п). (3.35) Для построения фильтра Винера необходимо знать статистические характеристики второго порядка: матрицу корреляции а„для вектора входного сигнала х(п) и вектора взаимной корреляции г„в между х(п) и желаемым откликом а(п).
Однако эта информация на практике зачастую недоступна. В неизвестной среде можно использовать линейный адаптивный филыпр (11пеаг в1арйче 611ег). Под термином «адаптивность’* понимается возможность настраивать свободные параметры фильтра в соответствии со статистическими вариациями среды. Наиболее популярным алгоритмом такой настройки на непрерывной основе является алгоритм минимизации среднеквадратической ошибки, который самым тесным образом связан с фильтром Винера. 188 Глава 3.
Однослойный лерсвлтрон Следовательно, д е(п) = -х(п), д Е(зч) = — х(п)е(п). Используя полученный результат, можно оценить вектор градиента й(п) = -х(п)е(п). (3.36) И, наконец, используя формулу (3.36) для вектора градиента в методе наискорейшего спуска (3.12), можно сформулировать алгоритм минимизации среднеквадратической ошибки в следующем виде: зв(п + 1) = ч(п) + т1 х(п)е(п), (3.37) где т! — параметр скорости обучения. Контур обратной связи для вектора весов Ф(п) в алгоритме минимизации среднеквадратической ошибки ведет себя как низкочастотный фильтр (1ож-раза Й!гег), передающий низкочастотные компоненты сигнала ошибки и задерживающий его высокочастотные составляющие [434). Усредненная временная константаэтой фильтрации обратно пропорциональнапараметрускорости обучения т).
Следовательно, при малых значениях 11 процесс адаптации будет продвигаться медленно. При этом алгоритм минимизации среднеквадратической ошибки будет запоминать большее количество предшествующих данных, а значит, более точной будет фильтрация. Другими словами, величина, обратная параметру скорости обучения 11, является мерой памяти (шеая~ге о( шепюгу) алгоритма минимизации среднеквадратической ошибки.
В формуле (3.37) вместо зв(п) мы использовали зв(п). Этим подчеркивается тот факт, что алгоритм минимизации среднеквадратической ошибки только оценивает (езйшаге) вектор весовых коэффициентов на основе метода наискорейшего спуска. Следовательно, используя алгоритм минимизации среднеквадратической ошибки, можно пожертвовать одной из отличительных особенностей алгоритма наискорейшего спуска. В последнем вектор весовых коэффициентов и» (и) изменяется по детерминированной траектории в пространстве весов при заранее выбранном параметре 11.
В противоположность этому в алгоритме минимизации среднеквадратической ошибки вектор зг(п) перемещается по случайной траектории. По этой причине алгоритм минимизации среднеквадратической ошибки иногда называют стохастическим градиентным алгоритмом. При стремлении количества итераций в алгоритме 1.МЯ к бесконечности вектор зв(п) выписывает хаотичную траекторию (в соответствии с З.б. Алгоритм минимизации среднеквадратической ошибки 187 ТАБЛИЦА 3.1. Краткое описание алгоритма минимизации среднеквадратической ошибки Вектор входного сигнала = х(п) Желаемый отклик = Н(п) Ч Ф(0) = 0 Для п = 1, 2,…
е(п) = г?(п) — «т(п)х(п), Ф(п + 1) = Ф(п) + з) х(п)е(п) Обучающий пример Выбираемый пользователем параметр Инициализация весов Вычислительная схема Граф передачи сигнала для алгоритма минимизации среднеквадратической ошибки Объединяя формулы (3.35) и (3.37), эволюцию вектора весов в алгоритме минимиза- ции среднеквадратической ошибки можно представить в следуюшсм виде: Ф(п+ 1) = Ф(п) + з? х(п)[г?(п) — хт(п)Ф(п)] = = [1 — з) х(п)хт(п)]Е(п) + з) х(п)д(п), (3.38) где 1 — единичная матрица.
При использовании алгоритма минимизации среднеквад- ратической ошибки (3.39) где х ‘ — оператор единичной задержки, реализующей память алгоритма. Используя выражения (3.38) и (3.39), алгоритм минимизации среднеквадратической ошибки можно представить в виде графа передачи сигнала, показанного на рис. 3.3. На этом графе видно, что алгоритм минимизации среднеквадратической ошибки является всего лишь частным случаем стохастической системы с обратной свзиью (мосйазйс 1еебЬаск зуиеш).
Наличие обратной связи оказывает первостепенное влияние на сходимость алгоритма?.М8. принципами броуновского движения) вокруг Винеровского решения зч,. Важно отметить, что, в отличие от метода наискорейшего спуска, алгоритм минимизации среднеквадратической ошибки не требует знания статистических характеристик окружающей среды. Краткое описание алгоритма минимизации среднеквадратической ошибки представлено в табл. 3.1, из которой ясно видна его простота. Из таблицы видно, что для инициализации (?п?йа?гкайоп) алгоритма достаточно обнулить его начальный вектор весовых коэффициентов.
188 Глава 3. Однослойный персептрон Лк(к й(к) Рис. 3.3. Граф передачи си~нала для апюритма минимизации сред- неквадратической ошибки Лк(к) хт(и) Условия сходимости алгоритма ~МЗ Е[тт(п)] — и, при п — оо, (3.40) где тт, — решение Винера. К сожалению, такой критерий сходимости не имеет большого практичесюго значения, так как последовательность произвольных векторов, имеющих среднее значение О, также будет удовлетворять этому условию.
С практической точки зрения вопрос устойчивости играет роль именно в смысле среднеквадратической сходимосл(и (солтегяепсе ог (1(е теал яоцвге): Е[ез(п)] -+ сопя( при и — оо. (3.41) Из теории управления известно, что устойчивость системы с обратной связью определяется параметрами обратной связи. На рис. 3.3 видно, что нижний контур обратной связи обеспечивает изменение поведения алгоритма минимизации среднеквадратической ошибки. В частности, пропускная способность юнтура обратной связи определяется двумя параметрами: козффициентом сюрости обучения 11 и вектором входного сигнала х(п). Таким образом, можно заключить, что сходимость (и устойчивость) алгоритма минимизации среднеквадратической ошибки зависит от статистических характеристик входного вектора х(п) и значения параметра т).
Другими словами, для каждой среды, из которой поступают входные векторы, следует подбирать собственный параметр скорости обучения (), который обеспечит сходимость алгоритма 1,МБ. Первым критерием сходимости алгоритма минимизации среднеквадратической ошибки является сходимослзь в среднем (сопчегяелсе оГ бте шеал): З.б.
Алюритм минимизации средиеквадратической ошибки 189 К сожалению, детальный анализ сходимости в смысле среднеквадратического значения для алгоритма ЬМЯ чрезвычайно сложен. Чтобы его математически упростить, сделаем следующие предположения. 1. Векторы входных сигналов х(1), х(2),… являются статистически независимыми друг от друга. 2. В момент времени и вектор входного сигнала х(п) является статистически независимым от всех предыдущих желаемых откликов, т.е.
41), д(2),…, И(п — 1). 3. В момент времени п желаемый отклик с1(п) зависит от вектора х(п), ио статистически не зависит от всех предыдущих значений желаемого отклика. 4. Вектор входного сигнала х(п) и желаемый отклик д(п) выбираются из множества, подчиняющегося распределению Гаусса. 2 0<Ч <— )~йЪЗХ (3.42) где 3 — наибольшее собственное значение (1агйез1 е)йепча!ие) матрицы корреляции К,. В типичных приложениях алгоритма ЬМБ значение 3, как правило, не известно. Чтобы обойти эту сложность, в качестве оценки сверху значения Х можно использовать след (пасе) матрицы К,. В этом случае условие (3.42) можно переписать в следующем виде: 2 )’ (3.43) где п[К,) — след матрицы К,. По определению след квадратной матрицы определяется как сумма ее диагональных элементов. Так как каждый из диагональных элементов матрицы корреляции К, является среднеквадратическим значением соответствующего входного сигнала, условие сходимости алгоритма минимизации среднеквадратической ошибки можно сформулировать в виде 2 0<э) < сумма среднеквадратических значений входных сигналов (3.44) Статистический анализ алгоритма минимизации среднеквадратической ошибки при наличии вышеуказанных допущений получил название теории независимости (1пдерепдепсе Гаеогу) [1138).
С учетом допущений теории независимости и достаточно малого значения параметра скорости обучения в [434) показано, что алгоритм минимизации средне- квадратической ошибки сходится в смысле среднеквадратического значения, если з) удовлепюряет условию 190 Глава 3. Однослойный лерселтрон Если параметр скорости обучения удовлетворяет этому условию, то алгоритм минимизации среднеквадратической ошибки сходится также и в смысле среднего значения. Это значит, что сходимость в смысле средиеквадратического значения является достаточным условием сходимости в среднем.