Как разработчика приборов для измерения параметров телевизионных сигналов меня часто спрашивают, как правильно интерпретировать результаты измерений. В настоящее время для специалистов, обслуживающих системы телеприема, доступно большое количество измерительных приборов, а значит, есть возможность количественно оценить качество телевизионных каналов, в том числе каналов с цифровой модуляцией. Однако при интерпретации измеренных величин до сих пор чувствуются неуверенность и сомнения. В этом материале я изложу свою точку зрения на значимость каждого из параметров, характеризующих качество телевизионного сигнала.
Mой взгляд на этот вопрос в основном формировался в процессе собственных разработок и производства телевизионных измерительных приборов. Но свою лепту внесли и консультации со специалистами всемирно известных компаний, производящих подобные приборы, и общение с операторами кабельных сетей.
Должен оговориться, что все нижеизложенное в первую очередь касается цифрового кабельного телевидения стандарта DVBC. Но в силу родственных связей между форматами DVB-вещания мои рассуждения с некоторыми оговорками можно отнести и к DVB-S, DVB-T, и др.
Содержание
- Пять основных параметров
- BER vs MER
- Самый важный параметр
- Время измерения BER
- Преимущества MER
- Констелляционная диаграмма
- Особенности измерения уровня цифровых сигналов
- Общие рекомендации по оценке качества цифровых каналов
- Использованная литература
Пять основных параметров
Для начала рассмотрим набор измеряемых параметров цифровых каналов, доступных владельцам современных приборов. Как правило, эти приборы позволяют измерять пять параметров.
Первый из них — уровень сигнала в канале. Без сомнения, это один из важнейших параметров, характеризующих качество приема. Несмотря на то, что это самый понятный для специалистов параметр и его с достаточной точностью можно измерить даже приборами, предназначенными для аналоговых сигналов, при анализе результатов измерений иногда встречаются неправильные толкования и недопонимания.
Следующий параметр — MER (Modulation Error Ratio), или Коэффициент ошибок модуляции. По своей сути MER близок параметру SNR (сигнал/шум). В некоторых странах вместо параметра MER применяют EVM (Величина вектора ошибки), но по существу это одно и то же, выражаемое в разных единицах.
Третий параметр — BER (Bit Error Ratio), или Коэффициент битовых ошибок. Он характеризует частоту появления ошибочно восстановленных битов в демодулированном потоке данных и для стандарта DVB-C измеряется в двух точках: до декодера РидаСоломона и после него. Поэтому фактически это два параметра, которым часто присваивают названия preBER и postBER. Параметр postBER — та величина, которую пользователю иногда предъявляют как значение счетчика ошибочных пакетов за интервал наблюдения.
Последний параметр — констелляционная диаграмма, которая представляет собой график расположения символов на амплитуднофазовой плоскости, формируемый с накоплением за определенное время. Как правило, диаграмма рассматривается как некий качественный, а не количественный параметр, позволяющий оценить характер искажений входного радиосигнала.
Теперь можно приступить к более подробному анализу каждого из параметров на предмет их важности в оценке качества принимаемого цифрового сигнала.
BER vs MER
В специализированной литературе, журналах и на интернет-форумах часто разгораются дискуссии о значимости этих параметров; нередко можно встретить мнение, что самым важным и информативным параметром является MER. Сторонники этой точки зрения мотивируют ее тем, что зависимость величины MER от уровня шумов в полосе канала носит более пологий характер по сравнению с кривой BER, поэтому можно точнее оценить запас по устойчивому приему сигнала. В этом высказывании есть, конечно, большая доля истины. В самом деле, диапазон измерения MER, как правило, находится в пределах от 26-27 дБ до 38-42 дБ и выше (для модуляции QAM-256). Это позволяет оценить запас по качеству сигнала от порога синхронизации, когда демодулятор только-только начинает восстанавливать сигнал при значении preBER 1E-2…1E-3 . К тому же значение MER, как правило, более стабильно по сравнению с BER, особенно когда BER ниже 1E-7, что объясняется временем усреднения этих величин. К этому обстоятельству я вернусь немного позже.
Mux: MER-ы бывают пиковые и среднеквадратичные. Среднеквадратичные отражают усредненное значение за период измерения, а пиковые — максимальное. Если измеряется среднеквадратичное, то вполне возможны краткие развалы картинок принормальном MER-е, но переход на измерения пикового значения покажут эти сбои.
Mux: Достижимая точность измерения MER тем выше, чем ниже размерность модуляции измеряемого сигнала. Чем больше точек констелляции должен обрисовать ЦАП, тем меньше у него времени на каждую точку. Karlson2k: MER — хороший показатель, однако не единственный. Для приёмника
скорее важен BER или даже PER (BER после декодера Рида-Соломона). Иногда с одними тем же MER могут быть совсем разные BER.
В «обычных» условиях корреляция между MER и BER достаточно чёткая. Действительно, появление BER свидетельствует о подходе к границе (которая для цифры очень тонкая — здесь ещё есть, ещё чуть-чуть и уже совсем нет). Но как раз граница и важна. Тем не менее, в реальной жизни полно условий, когда чёткость корреляции начинает сбивается. Например — частотный сдвиг, из-за допплеровского эффекта (актуально для DVB-H) или по каким-то другим причинам. Иногда сбой может быть вызван «особенностями» передатчиков. Конечно, на BER сложно ориентироваться при измерениях, особенно «быстрых», и в большинстве случаев достаточно на MER. Но при любых важных измерениях без BER не обойтись.
А на практике для бытовых приёмников важен еще и уровень сигнала. К сожа- лению, разница в минимальном уровне, при котором бытовой приёмник цепляется за сигнал, доходит до 30-35 дБ у разных моделей даже от одного производителя. Штампуется же всё «подешевле». То есть на что ориентироваться при постройке
сети — вопрос ещё тот .
Самый важный параметр
Тем не менее, берусь утверждать, что самый важный параметр из всех измеряемых для цифрового сигнала — BER, а точнее — postBER. Ведь уверенно заявлять, что восстановление потока, полученного за определенный период, было абсолютным, можно только в случае, если postBER за это время оказался равным нулю. В реальности значение для postBER, равное 1E10…1E11, говорит о частоте появления ошибки в восстановленном потоке данных не более 2…20 бит в час. Такой прием можно характеризовать как безошибочный. В соответствии с научной терминологией соответствующий поток данных можно назвать «квазисвободным от ошибок».
У BER есть, правда, один недостаток — невозможность оценить запас сигнала по качеству, за счет которого можно уверенно принимать и восстанавливать цифровой поток в течение длительного времени. В пороговой ситуации уменьшение значения MER для одного канала всего на 1-2 дБ может изменить ситуацию от полного восстановления данных к полной невозможности приема сигнала на этом канале и скачкообразному изменению значения BER.
Но, тем не менее, важность этого параметра весьма высока. Особенно он может быть полезен сторонникам контроля телевизионного изображения. Параметр postBER полностью заменяет контроль картинки за исключением того случая, когда в структуре транспортного потока MPEG присутствуют ошибки, приводящие к артефактам изображения. Но они не всегда приводят к дефектам картинки, заметным на экране монитора, или же искажениям звукового сопровождения, да и вообще появляются достаточно редко.
Зато postBER по сравнению с контролем изображения имеет несколько преимуществ. Во-первых, он показывает общее количество ошибок в транспортном потоке, а не на одной программе, как при контроле картинки.
Во-вторых, вычислению postBER никак не препятствует шифровка потоков системами условного доступа. И для открытых, и для закрытых каналов он вычисляется одинаково.
И, в-третьих, postBER более чувствителен к ошибкам: счетчик невосстановленных пакетов будет неумолимо увеличиваться с каждой следующей ошибкой, хотя «битый» пакет может принадлежать другой программе или вообще не оказывать влияния на картинку или звук и, как результат, будет пропущен при визуальном контроле.
С точки зрения оценки запаса по качеству сигнала более информативен, конечно, preBER. Общеизвестно, что пороговое значение preBER, равное 2E-4, дает возможность восстанавливать данные до требуемых 1E-10…1E-11 значения postBER. Но это как раз тот случай, когда мы находимся на границе между уверенным приемом и отсутствием возможности восстановить сигнал при ухудшении значения MER. Если при измерении параметров мы получаем значение preBER, скажем, 1E-6, это уже указывает на наличие некоего запаса, позволяющего нам быть увереннее в будущем.
Время измерения BER
Большинство приборов для измерения параметров сигналов с цифровой модуляцией имеют нижнюю границу диапазона измерения параметра BER 1E-8 или 1E-9, реже — 1E-10, 1E-11. Совершенно естественно, что пользователи приборов хотят иметь границу как можно ниже, а результат измерения получать как можно быстрее. Давайте посчитаем: если мы используем модуляцию QAM-256 и символьную скорость 6,9 Мбод, то битовая скорость на входе декодера РидаСоломона будет составлять 6,9*8=55,2 Мбит/с. Если вероятность появления ошибки 1E-8, то для измерения этой величины нам надо накопить 108 бит потока данных, из которых один бит будет ошибочным. А накапливать мы их будем в течение 108/55,2×106 = 1,8 с. То есть один неправильно декодированный бит будет появляться, в среднем, раз в две секунды.
Результат, измеренный за этот промежуток времени, будет, конечно, весьма неточным. Для уменьшения случайной погрешности необходимо его усреднить хотя бы за 10 периодов измерения, то есть за 18 секунд. Если мы захотим измерить BER с нижней границей 1E-9, то для этого нам потребуется в 10 раз больше времени: 180 секунд или 3 минуты, а для получения достоверного результата 1E-11 мы должны ждать пять часов! Если использовать модуляцию более низкого порядка или более низкую символьную скорость, время измерения увеличится еще больше
Преимущества MER
MER (Modulation Error Ratio) — это ошибка модуляции, характеризующая отклонение реального символа от местоположения символа идеального на констелляционной диаграмме1.
По сравнению с BER параметр MER предоставляет более оперативную информацию о сигнале. Как я уже упоминал, MER является подобием параметра отношения сигнал/шум, хотя и учитывает большее число факторов, искажающих исходный радиосигнал. Значение параметра так же усредняется по времени, как и все величины, связанные с измерением мощности, но его измерение производится для каждого символа и, учитывая большие символьные скорости, накопление за одну секунду дает достаточно достоверный результат.
Вторым достоинством параметра MER является возможность его измерения с нормированной точностью. Большинство современных микросхем декодеров, на основе которых производятся приборы, позволяют вычислять MER аппаратно или на основе величин амплитуд векторов I и Q.
Под аппаратным вычислением я имею в виду возможность получения среднеквадратичного значения вектора ошибки из одного из внутренних регистров демодулятора. Во всяком случае производители микросхем утверждают, что это именно оно, и измерения, в принципе, это подтверждают. А зная среднеквадратичное значение вектора ошибки, вычислить MER уже несложно.
Использование значений амплитуд векторов квадратур для этих целей часто менее пригодно, потому что от микросхемы можно получить лишь 7 или 8 двоичных разрядов амплитуды QIвекторов. В результате динамический диапазон расчетного значения MER получается весьма низок. А разрядность регистра ошибки, напротив, часто бывает 10-, а то и 16-битная.
Погрешность измерения, связанную с неидеальными параметрами тюнера и демодулятора, можно скорректировать, имея источник сигнала с калиброванным параметром сигнал/шум. Калибровка производится для входного сигнала с добавлением только белого шума, но такой метод, тем не менее, дает весьма хороший результат.
Поэтому погрешность параметра MER для многих приборов является нормированной величиной в отличие от BER. Точность измерения BER зависит от качества приемника и демодулятора прибора, и корректировать ее невозможно. В результате измерение BER разными приборами дает близкие значения при плохом и заметно различающиеся при хорошем (при больших значениях MER).
То есть более качественный прибор показывает более низкие (более близкие к реальным) значения BER. Способность измерять низкие значения BER является хорошим индикатором качества измерительного прибора.
Если это так, возникает вопрос: «А не достаточно ли измерять один только MER для оценки качества принимаемого сигнала, ведь время измерения небольшое. Параметр предоставляет комплексную и точную информацию. С этим можно согласиться, но только в одном случае, когда к исходному сигналу примешивается только белый гауссовский шум. Как показывают практика и тестовое моделирование, при выполнении этого условия MER совпадает с SNR, и поэтому в данном случае для определения значений preBER и postBER можно воспользоваться кривыми зависимости BER от отношения SNR входного сигнала.
Констелляционная диаграмма
К сожалению, в реальной жизни все далеко не так идеально. На пути доставки телевизионного сигнала от источника до конечного пользователя существует великое множество факторов, приводящих к искажению сигнала. В результате для определения качества сигнала все-таки приходится использовать все возможные параметры, в том числе констелляционную диаграмму.
ассмотрим подробнее процесс демодуляции сигнала с цифровой модуляцией. После синхронизации с входным сигналом на выходе блока демодулятора для каждого символа появляются два значения векторов I и Q.2 Пара векторов определяет точку на амплитуднофазовой плоскости, каждая из которых принадлежит одной клетке, определяющей конкретное значение символа. В идеальном случае точки ложатся точно в середины клеток.
В условиях воздействия шума точки получают некоторое смещение от ожидаемого положения, которое носит название вектора выходной ошибки. Если точка остается в пределах своей клетки, демодулятор принимает правильное решение, в противном случае символу присваивается значение соседней клетки, что к появлению ошибки во входном потоке данных. Добавление белого шума к входному сигналу приводит к «размазыванию» точки в пятно круглой формы (рис. 1). Наибольшая частота попадания точки — в центре, а к краю окружности она уменьшается. В этом случае все пятна имеют примерно одинаковый диаметр.
Теперь рассмотрим случай одновременного воздействия белого и фазового шумов на демодуляцию сигнала. На рис. 2 приведена констелляционная диаграмма для сигнала с добавлением паразитной фазовой модуляции (джиттер фазы), из которой видно, что фазовая модуляция приводит к большему отклонению точек от центра клетки с увеличением длины вектора. В результате вероятность возникновения ошибки при декодировании точек в углах констелляционной диаграммы резко увеличивается. При этом значение MER уменьшается не так сильно, потому как смещение для точек ближе к центру диаграммы незначительное.
Ситуация ухудшается еще сильнее в случае, если кроме фазовой модуляции присутствует компрессия сигнала, появившаяся при прохождении им активных устройств в зоне нелинейности их передаточной характеристики. Вершины длинных векторов смещаются к центру констелляционной диаграммы, в результате чего вероятность ошибок для этих векторов увеличивается еще значительнее. На значение MER такие искажения также не оказывают большого влияния.
Ниже приведены результаты моделирования трех перечисленных ситуаций: измерение сигнала QAM-256 в случае воздействия только белого шума, белого шума и фазовой модуляции и белого шума одновременно с компрессией амплитуды сигнала. Три соответствующие констелляционных диаграммы представлены на рис. 3.
На следующей диаграмме (рис. 4) представлены три кривые зависимости параметра BER при изменении отношения сигнал/шум во входном сигнале. Синяя линия соответствует первому случаю, когда во входном сигнале присутствует только белый шум, фиолетовая — белый шум и фазовая модуляция и, наконец, зеленая — белый шум и компрессия.
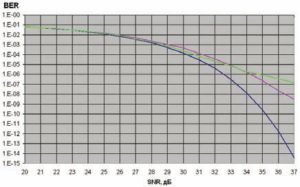
Рис. 4. Кривые зависимости параметра BER при изменении отношения сигнал/шум во входном сигнале
Видно, что при низких значениях сигнал/шум линии практически совпадают, но с увеличением параметра они начинают расходиться. Наконец, на последнем графике (рис. 5) приведена зависимость параметра MER при тех же условиях. Из графика видно: при соотношении сигнал/шум 36 дБ при добавления фазовой модуляции к входному сигналу MER уменьшается на 0,5 дБ, при этом значение BER ухудшается сразу на несколько порядков. Еще сильнее влияние компрессии, хотя она и едва различима на констелляционной диаграмме.
Это не единственные случаи искажения в исходном входном сигнале, которые приводят к сильному ухудшению BER при незначительном изменении значения MER. К аналогичным последствиям приводят фазовые искажения квадратур, амплитудный разбаланс векторов квадратур и т.д.
Правда, последние виды искажений возникают реже. Гораздо хуже ситуация с помехой импульсного характера. Такого рода искажения сигнала не редкость, поскольку существует большое количество устройств, излучающих радиосигнал, который может
выступать в роли импульсной помехи для cигнала телевизионного.
При достаточно низкой частоте повторения и короткой длительности такая помеха практически не влияет на значение MER, но при этом может приводить к полной деградации BER. Ситуация осложняется тем, что подобную помеху сложно обнаружить. Часто не помогает и анализатор спектра. К примеру, если мешающий сигнал находится в полосе канала и при этом меньше по мощности на 20-30 дБ, то он маскируется полезным сигналом.
Особенности измерения уровня цифровых сигналов
Пожалуй, самым понятным для цифровых ТВсигналов, как и для аналогового телевидения, является параметр, характеризующий мощность сигнала. Но, тем не менее, довольно часто возникают вопросы, связанные с определением уровня цифровых каналов, поэтому немного внимания уделим и этому параметру.
Для аналогового телевидения измеряется уровень напряжения радиосигнала несущей частоты изображения. Для цифрового ТВ — «мощность радиосигнала в полосе канала» (такое название часто применяется в зарубежной литературе) или «фактический уровень напряжения радиосигналов с цифровой модуляцией в полосе частот распределения радиосигналов», как он называется в российском ГОСТ Р 52023 — «Сети распределительных систем кабельного телевидения». В России параметр принято обычно измерять в дБ относительно 1 микровольта (дБмкВ) как для аналоговых, так и для цифровых каналов.
Мощность3 радиосигнала для цифровых каналов измеряется как уровень напряжения немодулированного сигнала, который на нагрузке 75 Ом рассеивает мощность, эквивалентную мощности сигнала измеряемого канала.
При измерении уровней сигналов с помощью специализированных телевизионных измерителей или универсальных анализаторов спектра следует учитывать, что в аналоговых каналах характер сигнала — узкополосный, то есть основная часть мощности канала сосредоточена в довольно узком частотном диапазоне, а цифровые каналы характеризуются равномерным распределением мощности в полосе канала. В основе работы измерителей уровня лежит принцип селективного вольтметра. То есть в спектре радиосигнала выделяется (отфильтровывается) определенная частотная полоса, а затем измеряется напряжение сигнала, попавшего в эту полосу.
Если при измерении уровня узкополосного сигнала ширина его спектра заведомо меньше полосы измерения4, уровень измеряемого сигнала будет постоянным при изменении полосы измерения в пределах канала. Ситуация меняется при измерении широкополосных сигналов, каковыми являются радиосигналы цифрового телевидения. В этом случае чем шире полоса измерения прибора, тем выше уровень измеряемого напряжения. На рис. 6 представлена спектрограмма частотного диапазона с несколькими телевизионными каналами с аналоговой и цифровой модуляциями.
Спектрограмма была снята с помощью прибора с полосой измерения 230 кГц. На первый взгляд, уровни цифровых каналов ниже аналоговых более чем на 10 дБ. Однако для аналогового канала S20 уровень (Uan) можно определить по спектру как 66 дБмкВ. А для определения мощности сигнала цифрового канала S23 необходимо применить следующую формулу:
Uцк = Uизм + 10lg(Вц/Виз) + К,5
где Uцк — искомая мощность цифрового канала;
Uизм — уровень напряжения измеренный в центре полосы канала; Вц — полоса частот, занимаемая цифровым каналом; Виз — полоса измерения прибора;
К — поправочный коэффициент, компенсирующий погрешности измерения6.
Подставив исходные данные в формулу, получим:
US23 = 53 + 10lg(7,5/0,23) + 1 = 69 дБмкВ.
Таким образом, на самом деле уровень мощности канала S23 на 3 дБ больше, чем S20.
В режиме измерения уровня специализированные телевизионные приборы автоматически производят такой пересчет цифровых каналов с учетом их полосы и отображают их мощность корректно. Но при работе в режиме анализатора спектра и при измерении приборами, не рассчитанными на работу с цифровыми каналами, надо помнить об этой особенности. Такой метод измерения мощности канала в одной частотной точке дает достаточно точный результат только в случае достаточной равномерности АЧХ в полосе канала.
Общие рекомендации по оценке качества цифровых каналов
Кабельные операторы, давно работающие с цифровым телевидением и имеющие большой опыт, советуют классифицировать состояние кабельной сети по трехбалльной шкале. Оценка три балла означает, что параметры каналов в сети соответствуют требованиям качественного приема и обладают достаточным запасом для стабильной, долговременной работы. От оператора при этом требуется только продолжение текущего контроля. Оценка два балла: параметры каналов также соответствуют требованиям качественного приема, но их значения не имеют достаточного запаса для обеспечения долговременной стабильной работы.
Такое состояние сети требует от оператора планового проведения работ для выявления источника проблем и принятия решения о методах восстановления состояния сети до трех баллов. И, наконец, третье состояние сети с оценкой один балл: параметры одного или нескольких каналов не отвечают требованиям качественного приема, что требует от оператора немедленных действий по ремонту или настраиванию сети для поднятия до второго или третьего уровня. Для оценки каждого канала необходимо измерить все параметры на абонентском отводе. Оценка присваивается в соответствии со следующими условиями.
Оценка 3 балла (выполняются все четыре условия): Уровень канала: соответствует расчетному уровню для данной точки сети с учетом неравномерности и принятой разницы между уровнями аналоговых и цифровых каналов.
MER: не меньше 36 дБ для модуляции QAM-256 и 28 дБ для модуляции QAM-64.
PreBER не превышает 1E7. PostBER: не превышает 1E9.
Оценка 2 балла (выполняются все четыре условия): Уровень канала: соответствует расчетному уровню для данной точки сети с учетом неравномерности и принятой разницы между уровнями аналоговых и цифровых каналов.
MER: находится в пределах от 34 до 36 дБ для модуляции QAM256 и от 26 до 28 дБ для модуляции QAM64.
PreBER: не превышает 1E6. PostBER: не превышает 1E9.
Оценка 1 балл (выполняется хотя бы одно условие):
Уровень канала: не соответствует расчетному уровню для данной точки сети с учетом неравномерности и принятой разницы между уровнями аналоговых и цифровых каналов.
MER: значение меньше 34 дБ для модуляции QAM-256 и меньше 26 дБ для модуляции QAM-64.
PreBER: значение выше 1E6. PostBER: значение выше 1E-9.
Если есть возможность контроля констелляционной диаграммы, необходимо добавить еще одно условие. Для оценки «3» форма констелляционной диаграммы не должна содержать ярко выраженных фазовых искажений, дисбаланса квадратур и искажений типа компрессии сигнала. При наличии подобных искажений измеряемому каналу должна быть присвоена оценка не выше двух баллов.
При указании значений параметров я исходил из предположения, что они измерены корректно, в пределах погрешности измерения прибора. Но при определенных условиях измеренные значения могут выпадать за пределы погрешности. В этом случае каналу может быть присвоена оценка, не соответствующая действительности.
Данная методика оценки качества не является, конечно, абсолютной и единственно верной. Каждый оператор может для себя выбрать границы значений параметров для оценки качества сигнала в соответствии с особенностями конкретной сети и отдельных каналов; при этом следует придерживаться общего подхода к методу проверки состояния сети.
——
1 Физический смысл этого параметра и формула для вычисления его среднеквадратичного значения рассмотрены в статьях серии «Цифровое кабельное ТВ. Часть 2. Состав головной станции, расчет ретранслируемого потока», «ТелеСпутник», ноябрь 2007 и «Цифровое кабельное ТВ. Часть 4. Сигнал DVB в распределительной сети. Использование альтернативных стандартов», январь 2008 (прим. ред.).
2 I= A cosφ, а Q = A sinφ где А – амплитуда QAM символа, а φ – фаза символа.
3 Имеется в виду мощностная характеристика, в качестве которой в телевидении принято использовать эквивалентное напряжение немодулированного сигнала, который по мощности равен сигналу телевизионному. Хотя в статье применяется термин «мощность цифрового канала», на самом деле подразумевается как раз напряжение этого эквивалентного сигнала (прим. автора).
4 Полоса измерения определяется полосой пропускания измерительного фильтра (прим. ред.).
5 Так эта формула выглядит в ГОСТ Р 52023 (прим. автора).
6 Коэффициент зависит в основном от параметров детектора (тип детектора и его постоянные времени) и прямоугольности измерительного фильтра. Определяется опытным путем и, как правило, составляет 13 дБ (прим. автора).
Андрей Конорев,
ведущий инженер ООО «Планар»
Использованная литература
- Б.А. Локшин. Цифровое вещание: — от студии к телезрителю.
- ГОСТ Р 52023-2003 «Сети распределительные систем кабельного телевидения».
- ETSI TR 101 290 Measurement guidelines for DVB system.
From Wikipedia, the free encyclopedia
In digital transmission, the number of bit errors is the number of received bits of a data stream over a communication channel that have been altered due to noise, interference, distortion or bit synchronization errors.
The bit error rate (BER) is the number of bit errors per unit time. The bit error ratio (also BER) is the number of bit errors divided by the total number of transferred bits during a studied time interval. Bit error ratio is a unitless performance measure, often expressed as a percentage.[1]
The bit error probability pe is the expected value of the bit error ratio. The bit error ratio can be considered as an approximate estimate of the bit error probability. This estimate is accurate for a long time interval and a high number of bit errors.
Example[edit]
As an example, assume this transmitted bit sequence:
1 1 0 0 0 1 0 1 1
and the following received bit sequence:
0 1 0 1 0 1 0 0 1,
The number of bit errors (the underlined bits) is, in this case, 3. The BER is 3 incorrect bits divided by 9 transferred bits, resulting in a BER of 0.333 or 33.3%.
Packet error ratio[edit]
The packet error ratio (PER) is the number of incorrectly received data packets divided by the total number of received packets. A packet is declared incorrect if at least one bit is erroneous. The expectation value of the PER is denoted packet error probability pp, which for a data packet length of N bits can be expressed as
 ,
,

assuming that the bit errors are independent of each other. For small bit error probabilities and large data packets, this is approximately

Similar measurements can be carried out for the transmission of frames, blocks, or symbols.
The above expression can be rearranged to express the corresponding BER (pe) as a function of the PER (pp) and the data packet length N in bits:
![{displaystyle p_{e}=1-{sqrt[{N}]{(1-p_{p})}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/f5d380e45b0451c45265e199221fae5bd5b84bf9)
Factors affecting the BER[edit]
In a communication system, the receiver side BER may be affected by transmission channel noise, interference, distortion, bit synchronization problems, attenuation, wireless multipath fading, etc.
The BER may be improved by choosing a strong signal strength (unless this causes cross-talk and more bit errors), by choosing a slow and robust modulation scheme or line coding scheme, and by applying channel coding schemes such as redundant forward error correction codes.
The transmission BER is the number of detected bits that are incorrect before error correction, divided by the total number of transferred bits (including redundant error codes). The information BER, approximately equal to the decoding error probability, is the number of decoded bits that remain incorrect after the error correction, divided by the total number of decoded bits (the useful information). Normally the transmission BER is larger than the information BER. The information BER is affected by the strength of the forward error correction code.
Analysis of the BER[edit]
The BER may be evaluated using stochastic (Monte Carlo) computer simulations. If a simple transmission channel model and data source model is assumed, the BER may also be calculated analytically. An example of such a data source model is the Bernoulli source.
Examples of simple channel models used in information theory are:
- Binary symmetric channel (used in analysis of decoding error probability in case of non-bursty bit errors on the transmission channel)
- Additive white Gaussian noise (AWGN) channel without fading.
A worst-case scenario is a completely random channel, where noise totally dominates over the useful signal. This results in a transmission BER of 50% (provided that a Bernoulli binary data source and a binary symmetrical channel are assumed, see below).
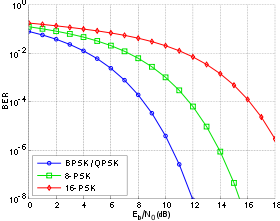
Bit-error rate curves for BPSK, QPSK, 8-PSK and 16-PSK, AWGN channel.

In a noisy channel, the BER is often expressed as a function of the normalized carrier-to-noise ratio measure denoted Eb/N0, (energy per bit to noise power spectral density ratio), or Es/N0 (energy per modulation symbol to noise spectral density).
For example, in the case of QPSK modulation and AWGN channel, the BER as function of the Eb/N0 is given by:
 .[2]
.[2]
People usually plot the BER curves to describe the performance of a digital communication system. In optical communication, BER(dB) vs. Received Power(dBm) is usually used; while in wireless communication, BER(dB) vs. SNR(dB) is used.
Measuring the bit error ratio helps people choose the appropriate forward error correction codes. Since most such codes correct only bit-flips, but not bit-insertions or bit-deletions, the Hamming distance metric is the appropriate way to measure the number of bit errors. Many FEC coders also continuously measure the current BER.
A more general way of measuring the number of bit errors is the Levenshtein distance.
The Levenshtein distance measurement is more appropriate for measuring raw channel performance before frame synchronization, and when using error correction codes designed to correct bit-insertions and bit-deletions, such as Marker Codes and Watermark Codes.[3]
Mathematical draft[edit]
The BER is the likelihood of a bit misinterpretation due to electrical noise  . Considering a bipolar NRZ transmission, we have
. Considering a bipolar NRZ transmission, we have
 for a «1» and
for a «1» and  for a «0». Each of
for a «0». Each of  and
and  has a period of
has a period of  .
.
Knowing that the noise has a bilateral spectral density  ,
,
is 
and is  .
.
Returning to BER, we have the likelihood of a bit misinterpretation  .
.
 and
and 
where  is the threshold of decision, set to 0 when
is the threshold of decision, set to 0 when  .
.
We can use the average energy of the signal  to find the final expression :
to find the final expression :

±§
Bit error rate test[edit]
BERT or bit error rate test is a testing method for digital communication circuits that uses predetermined stress patterns consisting of a sequence of logical ones and zeros generated by a test pattern generator.
A BERT typically consists of a test pattern generator and a receiver that can be set to the same pattern. They can be used in pairs, with one at either end of a transmission link, or singularly at one end with a loopback at the remote end. BERTs are typically stand-alone specialised instruments, but can be personal computer–based. In use, the number of errors, if any, are counted and presented as a ratio such as 1 in 1,000,000, or 1 in 1e06.
Common types of BERT stress patterns[edit]
- PRBS (pseudorandom binary sequence) – A pseudorandom binary sequencer of N Bits. These pattern sequences are used to measure jitter and eye mask of TX-Data in electrical and optical data links.
- QRSS (quasi random signal source) – A pseudorandom binary sequencer which generates every combination of a 20-bit word, repeats every 1,048,575 words, and suppresses consecutive zeros to no more than 14. It contains high-density sequences, low-density sequences, and sequences that change from low to high and vice versa. This pattern is also the standard pattern used to measure jitter.
- 3 in 24 – Pattern contains the longest string of consecutive zeros (15) with the lowest ones density (12.5%). This pattern simultaneously stresses minimum ones density and the maximum number of consecutive zeros. The D4 frame format of 3 in 24 may cause a D4 yellow alarm for frame circuits depending on the alignment of one bits to a frame.
- 1:7 – Also referred to as 1 in 8. It has only a single one in an eight-bit repeating sequence. This pattern stresses the minimum ones density of 12.5% and should be used when testing facilities set for B8ZS coding as the 3 in 24 pattern increases to 29.5% when converted to B8ZS.
- Min/max – Pattern rapid sequence changes from low density to high density. Most useful when stressing the repeater’s ALBO feature.
- All ones (or mark) – A pattern composed of ones only. This pattern causes the repeater to consume the maximum amount of power. If DC to the repeater is regulated properly, the repeater will have no trouble transmitting the long ones sequence. This pattern should be used when measuring span power regulation. An unframed all ones pattern is used to indicate an AIS (also known as a blue alarm).
- All zeros – A pattern composed of zeros only. It is effective in finding equipment misoptioned for AMI, such as fiber/radio multiplex low-speed inputs.
- Alternating 0s and 1s — A pattern composed of alternating ones and zeroes.
- 2 in 8 – Pattern contains a maximum of four consecutive zeros. It will not invoke a B8ZS sequence because eight consecutive zeros are required to cause a B8ZS substitution. The pattern is effective in finding equipment misoptioned for B8ZS.
- Bridgetap — Bridge taps within a span can be detected by employing a number of test patterns with a variety of ones and zeros densities. This test generates 21 test patterns and runs for 15 minutes. If a signal error occurs, the span may have one or more bridge taps. This pattern is only effective for T1 spans that transmit the signal raw. Modulation used in HDSL spans negates the bridgetap patterns’ ability to uncover bridge taps.
- Multipat — This test generates five commonly used test patterns to allow DS1 span testing without having to select each test pattern individually. Patterns are: all ones, 1:7, 2 in 8, 3 in 24, and QRSS.
- T1-DALY and 55 OCTET — Each of these patterns contain fifty-five (55), eight bit octets of data in a sequence that changes rapidly between low and high density. These patterns are used primarily to stress the ALBO and equalizer circuitry but they will also stress timing recovery. 55 OCTET has fifteen (15) consecutive zeroes and can only be used unframed without violating one’s density requirements. For framed signals, the T1-DALY pattern should be used. Both patterns will force a B8ZS code in circuits optioned for B8ZS.
Bit error rate tester[edit]
A bit error rate tester (BERT), also known as a «bit error ratio tester»[4] or bit error rate test solution (BERTs) is electronic test equipment used to test the quality of signal transmission of single components or complete systems.
The main building blocks of a BERT are:
- Pattern generator, which transmits a defined test pattern to the DUT or test system
- Error detector connected to the DUT or test system, to count the errors generated by the DUT or test system
- Clock signal generator to synchronize the pattern generator and the error detector
- Digital communication analyser is optional to display the transmitted or received signal
- Electrical-optical converter and optical-electrical converter for testing optical communication signals
See also[edit]
- Burst error
- Error correction code
- Errored second
- Pseudo bit error ratio
- Viterbi Error Rate
References[edit]
- ^ Jit Lim (14 December 2010). «Is BER the bit error ratio or the bit error rate?». EDN. Retrieved 2015-02-16.
- ^
Digital Communications, John Proakis, Massoud Salehi, McGraw-Hill Education, Nov 6, 2007 - ^
«Keyboards and Covert Channels»
by Gaurav Shah, Andres Molina, and Matt Blaze (2006?) - ^ «Bit Error Rate Testing: BER Test BERT » Electronics Notes». www.electronics-notes.com. Retrieved 2020-04-11.
![]() This article incorporates public domain material from Federal Standard 1037C. General Services Administration. (in support of MIL-STD-188).
This article incorporates public domain material from Federal Standard 1037C. General Services Administration. (in support of MIL-STD-188).
External links[edit]
- QPSK BER for AWGN channel – online experiment
В цифровой передаче , количество битовых ошибок является количеством принятых бит одного потока данных над каналом связи , которые были изменены из — за шум , помехи , искажений или битой синхронизацию ошибок.
Коэффициент битовых ошибок ( BER ) — это количество битовых ошибок в единицу времени. Коэффициент битовых ошибок (также BER ) — это количество битовых ошибок, деленное на общее количество переданных битов за исследуемый интервал времени. Коэффициент битовых ошибок — это безразмерная мера производительности, часто выражаемая в процентах . [1]
Бита вероятность ошибка р е является ожидаемым значением коэффициента ошибок по битам. Коэффициент битовых ошибок можно рассматривать как приблизительную оценку вероятности битовых ошибок. Эта оценка точна для длительного интервала времени и большого количества битовых ошибок.
Пример
В качестве примера предположим, что эта переданная битовая последовательность:
0 1 1 0 0 0 1 0 1 1
и следующая полученная битовая последовательность:
0 0 1 0 1 0 1 0 0 1,
Количество битовых ошибок (подчеркнутые биты) в данном случае равно 3. BER — это 3 неверных бита, разделенных на 10 переданных битов, в результате чего BER составляет 0,3 или 30%.
Коэффициент ошибок пакета
Коэффициент ошибок пакетов (PER) — это количество неправильно принятых пакетов данных, деленное на общее количество принятых пакетов. Пакет объявляется некорректным, если хотя бы один бит ошибочен. Ожидаемое значение PER обозначается вероятностью ошибки пакета p p , которая для длины пакета данных N бит может быть выражена как
- ,
предполагая, что битовые ошибки не зависят друг от друга. Для малых вероятностей битовых ошибок и больших пакетов данных это примерно
Подобные измерения могут быть выполнены для передачи кадров , блоков или символов .
Факторы, влияющие на BER
В системе связи на BER на стороне приемника могут влиять шум канала передачи , помехи , искажения , проблемы битовой синхронизации , затухание , замирания из-за многолучевого распространения беспроводной связи и т. Д.
BER может быть улучшен путем выбора сильного уровня сигнала (если это не вызывает перекрестных помех и большего количества битовых ошибок), путем выбора медленной и надежной схемы модуляции или схемы линейного кодирования , а также путем применения схем канального кодирования , таких как избыточные коды прямого исправления ошибок. .
КОБ передачи является количество обнаруженных битов , которые являются неправильными до коррекции ошибок, разделенных на общее количество переданных битов ( в том числе избыточных кодов ошибок). Информация КОБ , примерно равна вероятности ошибки декодирования , это число декодированных битов , которые остаются неправильно после коррекции ошибок, деленное на общее число декодированных битов (полезная информация). Обычно BER передачи больше, чем BER информации. На информационный BER влияет сила кода прямого исправления ошибок.
Анализ BER
BER можно оценить с помощью стохастического ( Монте-Карло ) компьютерного моделирования. Если предполагается простая модель канала передачи и модель источника данных , BER также может быть вычислен аналитически. Примером такой модели источника данных является источник Бернулли .
Примеры простых моделей каналов, используемых в теории информации :
- Двоичный симметричный канал (используется при анализе вероятности ошибки декодирования в случае непакетных битовых ошибок в канале передачи)
- Канал аддитивного белого гауссова шума (AWGN) без замирания.
Наихудший сценарий — это полностью случайный канал, в котором шум полностью преобладает над полезным сигналом. Это приводит к BER передачи 50% (при условии, что предполагается источник двоичных данных Бернулли и двоичный симметричный канал, см. Ниже).


В канале с шумом BER часто выражается как функция нормированного показателя отношения несущей к шуму, обозначаемого Eb / N0 (отношение энергии на бит к спектральной плотности мощности шума) или Es / N0 (энергия на символ модуляции для спектральная плотность шума).
Например, в случае модуляции QPSK и канала AWGN, BER как функция Eb / N0 определяется следующим образом:
. [2]
Люди обычно строят кривые BER для описания производительности цифровой системы связи. В оптической связи обычно используется зависимость BER (дБ) от принимаемой мощности (дБм); в то время как в беспроводной связи используется BER (дБ) по сравнению с SNR (дБ).
Измерение коэффициента ошибок по битам помогает людям выбрать подходящие коды прямого исправления ошибок. Поскольку большинство таких кодов исправляют только перевороты битов, но не вставки или удаления битов, метрика расстояния Хэмминга является подходящим способом измерения количества битовых ошибок. Многие кодеры FEC также непрерывно измеряют текущий BER.
Более общий способ измерения количества битовых ошибок — это расстояние Левенштейна . Измерение расстояния Левенштейна больше подходит для измерения характеристик сырого канала перед кадровой синхронизацией , а также при использовании кодов коррекции ошибок, предназначенных для исправления вставки и удаления битов, таких как коды маркеров и коды водяных знаков. [3]
Математический черновик
BER — это вероятность неправильной интерпретации из-за электрического шума. . Рассматривая биполярную передачу NRZ, мы имеем
для «1» и за «0». Каждый из а также имеет период .
Зная, что шум имеет двустороннюю спектральную плотность ,
является
а также является .
Возвращаясь к BER, мы можем немного неверно истолковать .
а также
куда — порог принятия решения, установленный в 0, когда .
Мы можем использовать среднюю энергию сигнала чтобы найти окончательное выражение:
± §
Проверка коэффициента битовых ошибок
BERT или тест частоты ошибок по битам — это метод тестирования цифровых схем связи, в котором используются заранее определенные шаблоны нагрузки, состоящие из последовательности логических единиц и нулей, сгенерированных генератором тестовых шаблонов.
BERT обычно состоит из генератора тестовых шаблонов и приемника, который может быть настроен на один и тот же шаблон. Их можно использовать парами, по одному на любом конце линии передачи, или по отдельности на одном конце с кольцевой проверкой на удаленном конце. BERT обычно представляют собой автономные специализированные инструменты, но могут быть основаны на персональном компьютере . При использовании количество ошибок, если таковые имеются, подсчитывается и представляется в виде отношения, например 1 на 1 000 000 или 1 на 1e06.
Распространенные типы паттернов стресса BERT
- PRBS ( псевдослучайная двоичная последовательность ) — псевдослучайный двоичный секвенсор из N бит. Эти последовательности шаблонов используются для измерения джиттера и глаз-маски TX-данных в электрических и оптических каналах передачи данных.
- QRSS (квазислучайный источник сигнала) — псевдослучайный двоичный секвенсор, который генерирует каждую комбинацию 20-битного слова, повторяет каждые 1048 575 слов и подавляет последовательные нули не более чем до 14. Он содержит последовательности с высокой плотностью, последовательности с низкой плотностью, и последовательности, которые меняются от низкого к высокому и наоборот. Этот шаблон также является стандартным шаблоном, используемым для измерения джиттера.
- 3 из 24 — шаблон содержит самую длинную строку последовательных нулей (15) с самой низкой плотностью (12,5%). Этот шаблон одновременно подчеркивает минимальную плотность единиц и максимальное количество последовательных нулей. Формат кадра D4 3 из 24 может вызвать желтый аварийный сигнал D4 для цепей кадра в зависимости от выравнивания одного бита с кадром.
- 1: 7 — Также упоминается как 1 из 8 . Он имеет только один в восьмибитной повторяющейся последовательности. Этот шаблон подчеркивает минимальную плотность 12,5% и должен использоваться при тестировании средств, установленных для кодирования B8ZS, поскольку шаблон 3 из 24 увеличивается до 29,5% при преобразовании в B8ZS.
- Мин. / Макс. — последовательность быстрого перехода узора с низкой плотности на высокую. Наиболее полезно при усилении функции ALBO ретранслятора .
- Все единицы (или отметка) — шаблон, состоящий только из единиц. Этот шаблон заставляет повторитель потреблять максимальное количество энергии. Если постоянный ток к ретранслятору отрегулирован должным образом, ретранслятор не будет иметь проблем с передачей длинной последовательности. Этот образец следует использовать при измерении регулирования мощности диапазона. Шаблон «все единицы без рамки» используется для обозначения AIS (также известного как синий сигнал тревоги ).
- Все нули — шаблон, состоящий только из нулей. Это эффективно при поиске оборудования, неправильно настроенного для AMI , такого как низкоскоростные входы мультиплексного волокна / радио.
- Чередование нулей и единиц — шаблон, состоящий из чередующихся единиц и нулей.
- 2 из 8 — шаблон содержит не более четырех последовательных нулей. Он не вызовет последовательность B8ZS, потому что для подстановки B8ZS требуется восемь последовательных нулей. Этот шаблон эффективен при поиске оборудования, не использованного для B8ZS.
- Bridgetap — разветвления моста в пределах пролета можно обнаружить с помощью ряда тестовых шаблонов с различной плотностью единиц и нулей. Этот тест генерирует 21 тестовую таблицу и длится 15 минут. Если возникает ошибка сигнала, на участке может быть один или несколько ответвлений моста. Этот шаблон эффективен только для участков T1, которые передают необработанный сигнал. Модуляция, используемая в пролетах HDSL, сводит на нет способность шаблонов моста обнаруживать ответвления моста.
- Multipat — этот тест генерирует пять часто используемых тестовых шаблонов, позволяющих проводить тестирование диапазона DS1 без необходимости выбирать каждый тестовый шаблон отдельно. Шаблоны: все единицы, 1: 7, 2 из 8, 3 из 24 и QRSS.
- T1-DALY и 55 OCTET — Каждый из этих шаблонов содержит пятьдесят пять (55) восьмибитовых октетов данных в последовательности, которая быстро изменяется между низкой и высокой плотностью. Эти паттерны используются в первую очередь для нагрузки на схему ALBO и эквалайзера, но они также усиливают восстановление синхронизации. 55 OCTET имеет пятнадцать (15) последовательных нулей и может использоваться только без рамки без нарушения требований к плотности. Для сигналов с фреймами следует использовать шаблон T1-DALY. Оба шаблона вызовут код B8ZS в схемах с опцией для B8ZS.
Тестер коэффициента битовых ошибок
Тестер коэффициента ошибок по битам (BERT), также известный как «тестер коэффициента ошибок по битам» [4] или решение для тестирования коэффициента ошибок по битам (BERT), представляет собой электронное испытательное оборудование, используемое для проверки качества передачи сигнала отдельных компонентов или целых систем.
Основные строительные блоки BERT:
- Генератор шаблонов , который передает определенный тестовый шаблон в ИУ или тестовую систему.
- Детектор ошибок, подключенный к DUT или тестовой системе, для подсчета ошибок, генерируемых DUT или тестовой системой.
- Генератор тактовых сигналов для синхронизации генератора шаблонов и детектора ошибок
- Анализатор цифровой связи не является обязательным для отображения переданного или принятого сигнала.
- Электрооптический преобразователь и оптико-электрический преобразователь для проверки сигналов оптической связи.
См. Также
- Пакетная ошибка
- Код исправления ошибок
- Секунда с ошибками
- Частота ошибок Витерби
Ссылки
- ^ Джит Лим (14 декабря 2010). «Является ли BER коэффициентом ошибок по битам или коэффициентом ошибок по битам?» . EDN . Проверено 16 февраля 2015 .
- ^
Digital Communications, Джон Proakis Масуд Салехи, McGraw-Hill Образование, ноябрь 6, 2007 - ^ «Клавиатуры и скрытые каналы»
Гауравом Шахом, Андресом Молиной и Мэттом Блейзом (2006?)
- ^ «Тестирование частоты ошибок по битам: Тест BER BERT» Электроника » . www.electronics-notes.com . Проверено 11 апреля 2020 .
![]() Эта статья включает материалы, являющиеся общественным достоянием, из документа Управления общих служб : «Федеральный стандарт 1037C» .(в поддержку MIL-STD-188 )
Эта статья включает материалы, являющиеся общественным достоянием, из документа Управления общих служб : «Федеральный стандарт 1037C» .(в поддержку MIL-STD-188 )
Внешние ссылки
- QPSK BER для канала AWGN — онлайн-эксперимент
Качество сетей передачи данных. Транспорт
Время прочтения
8 мин
Просмотры 28K

В предыдущей статье были затронуты базовые метрики качества сетей и систем передачи данных. Также было обещано написать про то, как все работает изнутри. И намеренно не было упомянуто про качество среды передачи данных и ее характеристиках. Надеюсь, что новая статья даст ответы на эти вопросы.
Среда передачи
Начну, пожалуй, с последнего пункта — качества среды передачи. Как уже написано выше, про нее ничего не говорилось в предыдущем повествовании, поскольку само по себе количество сред и их характеристики очень сильно различаются и зависят от просто колоссального множества факторов. Разбираться во всем этом многообразии задача соответствующих специалистов. Всем очевидно использование радио-эфира в качестве среды передачи данных. Я же помню в конце 90-х начале 00-х особой популярностью у операторов связи стали пользоваться такие экзотические способы передачи, как лазерные атмосферные передатчики.  Выглядели они, в зависимости от производителя и конфигурации примерно как на картинке слева (да, почти такой себе светотелефон из радиолюбительского детства). Преимущество их было в том, что не надо было получать разрешение ГРКЧ, да и скорости, по сравнению с радиомостом были несколько больше, кроме того существовали модификации для организации каналов с временным разделением (E1 и т.п.), а подобное оборудование радио-доступа стоило непомерно дорого. Почему не оптический кабель? Потому что в те счастливые времена дикого провайдинга оптика еще была довольно дорогой, а за конвертер интерфейса или активное оборудование, способное принять оптический линк напрямую давали небольшой (а кто-то и большой) брусок золота. Были еще спутниковые каналы, но это вообще из области фантастики и позволить их себе могли разве что компании нефтяного сектора и прочего национального благосостояния. Но работа канала через спутник сводится к использованию радио-эфира, со всеми вытекающими и внесением огромной задержки.
Выглядели они, в зависимости от производителя и конфигурации примерно как на картинке слева (да, почти такой себе светотелефон из радиолюбительского детства). Преимущество их было в том, что не надо было получать разрешение ГРКЧ, да и скорости, по сравнению с радиомостом были несколько больше, кроме того существовали модификации для организации каналов с временным разделением (E1 и т.п.), а подобное оборудование радио-доступа стоило непомерно дорого. Почему не оптический кабель? Потому что в те счастливые времена дикого провайдинга оптика еще была довольно дорогой, а за конвертер интерфейса или активное оборудование, способное принять оптический линк напрямую давали небольшой (а кто-то и большой) брусок золота. Были еще спутниковые каналы, но это вообще из области фантастики и позволить их себе могли разве что компании нефтяного сектора и прочего национального благосостояния. Но работа канала через спутник сводится к использованию радио-эфира, со всеми вытекающими и внесением огромной задержки.
Соответственно погружаясь в вопрос в результате будем иметь множество сред и ни одной обобщенной характеристики. Тем не менее для нас среда это всего лишь транспорт, передающий информацию из точки А в точку Б. А для транспорта (даже общественного) характеристикой отражающей его качество будет доставка всех битов (ну или пассажиров) без искажений и потерь (не хотелось бы лишиться части тела при перевозке, согласитесь). Т.е. мы приходим к такой обобщенной метрике качества транспорта как количество битовых ошибок, или BER (Bit error rate). В чисто пакетных сетях она практически не используется, поскольку ошибки передачи выявляются на уровне пакета, например подсчетом контрольных сумм: FCS (Frame check sequence) для L2 или сhecksum IP для L3. Если контрольная сумма не совпадает, то пакет целиком отбрасывается как невалидный. Если же рассмотреть гетерогенные сети, те в которых транспортом может служить непакетная сеть, а, например, один из вариантов описанных выше, либо вообще используется транзит через ATM, PDH, SDH и подобное без непосредственной (но с восстановлением) передачи пакета, то битовые ошибки транспорта могут значительно влиять, конечно в зависимости от технологии. Рассмотрим инкапсуляцию и передачу Ethernet-фрейма в HDLC. Другие технологии используют практически такую же технику.

Схема читается слева-направо (взята здесь).
- Какой-то узел сети А отправляет пакет в сторону какого-то узла сети Б
- Транспорт между сетями построен на сети PDH
- Узел на границе выхода сети А вырезает из Ethernet-фрейма область полезной нагрузки (поля от DestinationAddress до FCS включительно), оборачивает в HDLC заголовки, и отправляет на граничный узел входа сети Б
- Граничный узел входа сети Б выделяет область полезной нагрузки и восстанавливает Ethernet-фрейм
- Фрейм с граничного узла отправляется получателю
Как можно видеть, в данном случае контрольная передается корректно и в случае повреждения битового потока в процессе передачи восстановленный пакет с неверной FCS будет отброшен получателем. В данном случае механизм обнаружения ошибки налицо.
Но не всегда используется надстройка инкапсуляции, либо передается вообще не полноценный фрейм, а лишь поле payload. Т.е. вырезается область, оборачивается во внутренний протокол, а на другой стороне восстанавливаются недостающие данные, включая отсутствующие заголовки L2. Соответственно пропадает и FCS — она просто рассчитывается заново. Таким образом получается, если данные были повреждены, а FCS рассчитан на основании “испорченных” данных, то получатель принимает совсем не тот пакет, который ему отправляли. Это довольно часто встречается в спутниковой связи, чтобы повысить полезную утилизацию канала, избегая передачи условно “лишней” информации. Резюмируя, получается что метрика BER может быть интересна в случаях когда:
- необходимо проверить стабильность физического канала, например для оптики это 10E-12 (упоминается в IEEE802.3)
- Ethernet-фреймы упаковывают в SDH(GFP), PDH, ATM и другие транспортные сети.
- используются технологии xHSL, PPP протоколы в которые упаковывают IP пакеты
BER тест
Метрика известна — это отношение количество битовых ошибок к общему числу переданных битов. Методика измерения для сетей TDM известна как спецификация ITU-T G.821. Классически для проверки каналов используется BERT (BER Test) первого уровня, но с учетом специфики работы протоколов инкапсуляции пакетных сетей и самого принципа работы пакетных сетей необходимо иметь возможность проводить тесты на L1-L4. Немного далее будет рассмотрено подробнее. Ну а сейчас следует определиться что проверять и как проверять. На вопрос:” Что проверять?” Отвечает ITU-T 0.150. В его пункте 5 рассмотрены типы ПСП (псевдослучайных последовательностей), из которых просто берутся данные для формирования пакета. Т.е. нужно просто взять и заполнить соответствующий уровень пакета данными выбранной ПСП. У нас в приборах используются следующие ПСП:
- ПСП 2е9 (ITU-T 0.150 пункт 5.1)
- ПСП 2е11 (ITU-T 0.150 пункт 5.2)
- ПСП 2е15 (ITU-T 0.150 пункт 5.3)
- ПСП 2е23 (ITU-T 0.150 пункт 5.6)
- ПСП 2е31 (ITU-T 0.150 пункт 5.8)
- пользовательская последовательность (32 бита)
- все нули
- все единицы
- альтернативная последовательность (01010101)
Пользовательская последовательность введена для совместимости с приборами, которые существуют на рынке, т.е можно задать любую последовательность и проводить совместный тест.
Вопрос как проверять пока что открыт, попробуем разобраться. Допустим мы умеем генерировать определенные пакеты. Если отправить такой пакет на другой конец транспорта, то как понять, что он не изменился (следует абстрагироваться от пакетного принципа, поскольку у нас может не быть FCS и других типов контроля, как описано ранее)? Самый простой вариант — завернуть пакет обратно (в TDM называется “сделать петлю”, в Ethernet — установить шлейф). Заворот, во многих случаях, можно сделать на выходе канала без изменения среды передачи, т.е. реально поставить петлю на выходе E1 и все будет работать. Но т.к. данные проделывают двойной путь, то вероятность возникновения ошибки также возрастает в 2 раза. Да и каналы могут быть асимметричными или однонаправленными. Соответственно идеальным было бы иметь возможность обладать информацией о корректном следовании и сравнивать приходящие пакеты с уже известной информацией. Первый, и наиболее простой вариант, применимый когда оба выхода канала располагаются рядом (например такое возможно при TDM коммутации, или тестировании оптического “кольца”) заключается в том, что один порт прибора генерирует тестовый трафик, а другой порт этого же прибора его получает и сравнивает, а т.к. сравнение происходит в том же узле, что и генерация, то проблем со сравнением данных последовательности не возникает. Второй вариант предполагает восстановление первоначальной последовательности и сравнение ее с приходящими данными. В случае с полностью случайной последовательностью реализовать такое не представляется возможным, а вот если последовательность псевдослучайная, то вполне. Какое-то время затрачивается на синхронизацию в самом начале теста, но затем сравнение не представляет сложности. Поскольку ПСП первого прибора и ПСП второго известны и одинаковы, синхронизация сводится к поиску места начала сравнения в ПСП второго прибора. Таким образом существуют следующие топологии:
- «сам на себя» 1 — один прибор на одном порту, на другом конце транспорта стоит шлейф
- «сам на себя» 2 — один прибор с одного порта своего порта на другой свой порт
- с одного прибора на другой прибор, с синхронизацией
Еще раз стоит отметить, что тест BER не рекомендуется использовать на сетях лишь с пакетной коммутацией. Приведу пример. Допустим, уже идет тестовый поток и приборы синхронизированы (топология 3). В какой-то момент времени происходит следующее:
- формируется Ethernet-фрейм, содержащий данные ПСП
- для такого фрейма рассчитывается FCS и он укладывается в выходной буфер
- фрейм отправляется по сети на другой прибор
- по каким-то причинам происходит изменение всего одного бита внутри пакета
- получатель принимает пакет
- FCS принятого пакета не соответствует содержимому
- пакет отбрасывается (если между отправителем и получателем есть, например, коммутатор, то “кривой” пакет вообще не дойдет до получателя, т.к. будет уничтожен до него)
- отправитель формирует следующий пакет (все начинается с п.1)
В приведенном примере на шаге 8 произойдет срыв синхронизации на стороне получателя. Произойдет это потому, что отправитель возьмет следующий блок ПСП, а получатель будет сравнивать с тем блоком, который потерялся в предыдущем цикле (он ведь ничего не знает о потере). Срыв синхронизации приведет к необоснованно большому росту битовых ошибок, т.к. все вновь идущие блоки абсолютно не совпадают, что приведет к тому, что за один пакет число битовых ошибок будет увеличиваться на размер фрейма. Через какое-то время будет предпринята попытка восстановления синхронизации, но количество накопленных битовых ошибок будет сильно не соответствовать действительности.
А как в железе?
Как у других не знаю, но у наших приборов Беркут (ET, ETX, ETL, B100, а также модуль B5-GBE для MMT) дела обстоят следующим образом. Помня принцип о генерации и анализе трафика как можно ближе к физическому сегменту из первой статьи, все подобные задачи были возложены на FPGA. Упрощенная структурная схема выглядит так:
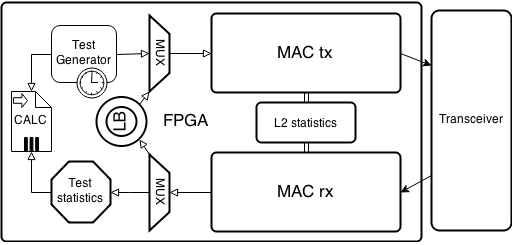
MAC ядро представлено двумя блоками: один на прием, другой на передачу. Это позволяет независимо принимать и отправлять пакеты, т.е. нет взаимовлияния очереди отправки на очередь приема и наоборот. Также с двух независимых блоков возможно вести общую статистику по полученному и отправленному трафику независимо от типа теста. Данные с блока передачи поступают на трансмиттер и отправляются в сеть, а входящие данные с трансивера поступают в блок приема.
Поскольку для некоторых топологий тестов необходим функционал шлейфа (loopback, петля), то он реализован отдельным блоком. Возможно установить шлейф уровня L1-L4:
- L1 — просто заворачивает трафик обратно (происходит это еще в трансивере)
- L2 — меняет DstMAC<->SrcMAC местами, пересчитывает FCS
- L3 — меняет DstMAC<->SrcMAC и DstIP<->SrcIP местами, пересчитывает FCS
- L4 — меняет DstMAC<->SrcMAC, DstIP<->SrcIP и DstPort<->SrcPort, пересчитывает FCS
Статистика по пакетам ведется и для режима шлейфа тоже, что позволяет грубо оценить соотношение отправленных и принятых пакетов.
Модуль генератора для каждого типа теста свой, для BERT он содержит генератор ПСП всех заявленных типов.
Работает это следующим образом. От генератора ПСП поступают данные на мультиплексор (проще говоря коммутатор), который, если не включен какой-то другой канал в данный момент, направляет поток в MAC tx модуль. MAC tx модуль, в соответствии с настройками теста (уровень BERT, размер пакета, данные полей) формирует из ПСП валидный Ethernet-фрейм и отправляет его в трансивер, который в свою очередь отправляет его в сеть. В зависимости от топологии теста фрейм либо заворачивается удаленной стороной, либо анализируется. В любом случае первичная обработка пакета не отличается. Фрейм попадает на MAC rx ядро, которое отправляет его на мультиплексор. Мультиплексор в зависимости от режима работы прибора направляет пакет либо в Loopback модуль, откуда после обработки он сразу же направляется в MAC tx для отправки, либо в модуль обработки и статистики теста, где, если потребуется, будет проведена попытка синхронизации ПСП и выполнено сравнение исходной последовательности с полученной. Результаты обработки отдаются в модуль вывода статистики.
Использование FPGA или ASIC позволяет все операции проводить параллельно, что не вносит какие либо задержки на обработку и исключает взаимовлияние модулей обработки.
Заключение
Несмотря на всю кажущуюся простоту алгоритмов и методик, за ними стоит много лет серьезных исследований. Огромное число факторов до сих пор влияет как на точность измерений, так и на стоимость приборов (прецизионные элементы, высокоскоростные ПЛИС). Например, приведенный выше BER тест не отличается значительной сложностью в общем алгоритмическом плане, но требует знаний в области математики, информатики и теории информации для разработки жизнеспособной модели. Модификация BER теста для пакетных сетей (поддержка уровней L2-L4) требует глубокого понимания принципов коммутации и маршрутизации. Надеюсь, что подобного рода статьи интересны и приносят пользу. В следующих публикациях планирую написать про сертифицированные тесты, генераторы трафика, фильтры и аналитические комплексы. Ведь как сказал Джон Фицджеральд Кеннеди на выступлении перед гражданами США перед стартом Лунной программы:
“И мы сделаем это. Не потому, что это легко, а потому что трудно.”
PS. Задавайте вопросы и предлагайте темы, в рамках нашей компетенции готовы на все 
Что такое BER — Bit Error Rate?
Date:2016/4/5 15:56:57 Hits:
«Коэффициент ошибок по битам, BER используется для количественной оценки канала, несущего данные, путем подсчета частоты ошибок в строке данных. Он используется в телекоммуникациях, сетях и радиосистемах.Коэффициент битовых ошибок, BER — ключевой параметр, который используется при оценке систем, передающих цифровые данные из одного места в другое «. — Fmuser
Системы, для которых коэффициент битовых ошибок, BER применима включают ссылки радио данных, а также информационных систем волоконно-оптические, Ethernet, или любую систему, которая передает данные по сети той или иной форме, где шум, помехи, и дрожание фазы может вызвать ухудшение цифрового сигнал.Хотя есть некоторые различия в том, как эти системы работают и каким образом влияет скорость передачи в битах ошибки, основы скорости битовых ошибок сама по-прежнему то же самое.
Когда данные передаются по каналу передачи данных, существует вероятность ошибок, вводимых в систему. Если ошибки вводятся в данных, то целостность системы может быть поставлена под угрозу. В результате, необходимо оценить производительность системы, и коэффициент ошибок в битах, BER, обеспечивает идеальный способ, в котором это может быть достигнуто.
В отличие от многих других форм оценки, частота ошибок по битам, КОБ оценивает полный впритык производительность системы, включающей передатчик, приемник и среды между ними. Таким образом, частота появления ошибочных битов, КОБ позволяет реальная производительность системы в эксплуатацию, подлежащих испытанию, а не проверки составных частей и в надежде, что они будут работать удовлетворительно, когда на месте.
Бит ошибки скорости определения BER и основы
Как следует из названия, частота ошибочных битов определяется как скорость, при которой возникают ошибки в системе передачи. Это может быть непосредственно переведены в число ошибок, возникающих в строке заявленным количеством битов. Определение частоты появления ошибочных битов может быть переведена в простую формулу:
Если среда между передатчиком и приемником хорошо и соотношение сигнал-шум является высоким, то скорость битовых ошибок будет очень мала — возможно, незначительны и не имеющие какого-либо заметного влияния на общую систему Однако, если шум может быть обнаружен, то есть вероятность того, что частота появления ошибочных битов нужно будет рассмотреть.
Основными причинами деградации канала передачи данных и соответствующей частоты ошибок передачи в битах, BER шум и изменения в пути распространения (где используются сигнальные пути радио). Оба эффекта имеют случайный элемент к ним, шум следующий гауссовой функции вероятности в то время как модель распространения следует модели Рэлея. Это означает, что анализ характеристик канала, как правило, проводится с использованием методов статистического анализа.
Для волоконно-оптических систем, битовых ошибок в основном являются результатом несовершенства используемых компонентов, чтобы сделать ссылку. Они включают в себя оптический драйвер, приемник, разъемы и самого волокна. Ошибки в битах также могут быть введены в результате оптической дисперсии и затухания, которые могут присутствовать. Также шум может быть введен в самом оптическом приемнике. Как правило, они могут быть фотодиоды и усилители, которые должны реагировать на очень маленьких изменений, и в результате может быть высокий уровень шума, который присутствует.
Другим фактором, способствующим для битовых ошибок является любой Дрожание фазы, которые могут присутствовать в системе, так как это может изменить выборку данных Теа.
BER и Eb / No
Отношение сигнал-шум и Eb / No цифры не являются параметрами, которые в большей степени связаны с радиолиний и систем радиосвязи. С точки зрения этого, частота появления ошибочных битов, BER, также может быть определена в терминах вероятности ошибки или POE. Определения этого используются три других переменных. Они являются функция ошибки, ERF, энергия в один бит, ЭБ, и спектральная плотность мощности шума (что мощность шума в полосе частот Гц 1), №
Следует отметить, что каждый тип модуляции имеет свое собственное значение функции ошибки. Это происходит потому, что каждый тип модуляции выполняет по-разному в присутствии шума. В частности, схемы более высокого порядка модуляции (к примеру 64QAM и т.д.), которые способны переносить более высокие скорости передачи данных, не столь надежными в присутствии шума. Меньшие форматы модуляции порядка (например, BPSK, QPSK и т.д.) предлагают более низкие скорости передачи данных, но являются более надежными.
Энергии на бит, ЭБ, может быть определена путем деления мощности несущей на скорости передачи данных и является мерой энергии с размерами джоулей. Нет это мощность на герц, и поэтому это имеет размерность мощности (джоулей в секунду), разделенное на секунды). Не Глядя на размеры отношение Eb / No все размеры компенсируют дать безразмерное отношение. Важно отметить, что РОЕ пропорционально Eb / No и является формой сигнала к шуму.
Факторы, влияющие на частоту появления ошибочных битов BER,
Это можно видеть из использования Eb / No, что частоты появления ошибочных битов, КОБ может зависеть от ряда факторов. Изменяя переменные, которыми можно управлять, можно оптимизировать систему, чтобы обеспечить уровень производительности, которые необходимы. Это, как правило, проводится в стадии проектирования системы передачи данных таким образом, что рабочие параметры могут быть скорректированы на начальных этапах проектирования концепции.
• Помехи: Уровни помех, присутствующих в системе, как правило, установлены под воздействием внешних факторов и не может быть изменен с помощью конструкции системы. Тем не менее, можно установить ширину полосы пропускания системы. За счет снижения пропускной способности уровень помех может быть уменьшено. Однако уменьшение полосы пропускания ограничивает пропускную способность данных, что может быть достигнуто.
• Увеличьте мощность передатчика: Кроме того, можно повысить уровень мощности системы таким образом, чтобы мощность на бит увеличивается. Это должно быть сбалансировано против факторов, включая уровни помех другим пользователям и влияние увеличения выходной мощности от размера усилителя мощности и общее энергопотребление и время автономной работы и т.д.
• Модуляция низшего порядка: схемы модуляции Низшие порядка могут быть использованы, но это за счет скорости передачи данных.
• Уменьшите пропускную способность: Другой подход, который может быть принят, чтобы уменьшить частоту появления ошибочных битов, чтобы уменьшить ширину полосы частот. Более низкие уровни шума будут получены, и, следовательно, соотношение сигнал-шум улучшится. Опять же это приводит к уменьшению пропускной способности данных достижимым.
Необходимо сбалансировать все имеющиеся факторы для достижения удовлетворительной скорости появления ошибочных битов. Обычно это не представляется возможным достичь всех требований и некоторые компромиссы необходимы. Тем не менее, даже с битовой частотой ошибок ниже того, что в идеале требуется, дополнительные компромиссы могут быть сделаны с точки зрения уровней коррекции ошибок, которые вводятся в передаваемые данные. Хотя более избыточные данные должны быть отправлены с более высокими уровнями коррекции ошибок, это может помочь замаскировать последствия любых битовых ошибок, которые возникают, тем самым улучшая общую частоту появления ошибок в битах.
Частота появления ошибочных битов BER является параметром, который дает прекрасную индикацию производительности линии передачи данных, таких как радио или волоконно-оптической системы. В качестве одного из основных параметров, представляющих интерес в любой линии передачи данных является количество ошибок, которые возникают, то коэффициент ошибок в битах является ключевым параметром. Знание BER также позволяет использовать другие особенности ссылки, такие как мощность и пропускную способность, и т.д., чтобы быть адаптированы для того, чтобы требуемые эксплуатационные характеристики, которые будут получены.