For register access, two different modes have to be
distinguished:
· Reset mode
· Operating mode.
The reset mode (see Table 3, control register, bit Reset
Request) is entered automatically after a hardware reset
or when the controller enters the bus-off state (see
Table 5, status register, bit Bus Status). The operating
mode is activated by resetting of the reset request bit in the
control register
When the transmit error counter exceeds the limit of 255 [the bus status bit is set to logic 1 (bus-off)] the
CAN controller will set the reset request bit to logic 1 (present) and an error interrupt is generated, if enabled. It will
stay in this mode until the CPU clears the reset request bit. Once this is completed the CAN controller will wait the
minimum protocol-defined time (128 occurrences of the bus-free signal). After that the bus status bit is cleared
(bus-on), the error status bit is set to logic 0 (ok), the error counters are reset and an error interrupt is generated, if
enabled.
Промышленная сеть реального времени CAN представляет собой сеть с общей средой передачи данных. Это означает, что все узлы сети одновременно принимают сигналы передаваемые по шине. Невозможно послать сообщение какому-либо конкретному узлу. Все узлы сети принимают весь трафик передаваемый по шине. Однако, CAN-контроллеры предоставляют аппаратную возможность фильтрации CAN-сообщений.
Каждый узел состоит из двух составляющих. Это собственно CAN контроллер, который обеспечивает взаимодействие с сетью и реализует протокол, и микропроцессор (CPU).
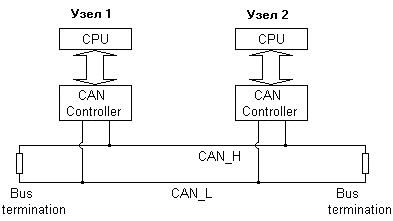 Рис. 1. Топология сети CAN.
Рис. 1. Топология сети CAN.
CAN контроллеры соединяются с помощью дифференциальной шины, которая имеет две линии — CAN_H (can-high) и CAN_L (can-low), по которым передаются сигналы. Логический ноль регистрируется, когда на линии CAN_H сигнал выше, чем на линии CAN_L. Логическая единица — в случае когда сигналы CAN_H и CAN_L одинаковы (отличаются менее чем на 0.5 В). Использование такой дифференциальной схемы передачи делает возможным работу CAN сети в очень сложных внешних условиях. Логический ноль — называется доминантным битом, а логическая единица — рецессивным. Эти названия отражают приоритет логической единицы и нуля на шине CAN. При одновременной передаче в шину лог. нуля и единицы, на шине будет зарегестрирован только логический ноль (доминантный сигнал), а логическая единица будет подавлена (рецессивный сигнал).
Типы сообщений сети CAN.
Данные в CAN передаются короткими сообщениями-кадрами стандартного формата. В CAN существуют четыре типа сообщений:
- Data Frame
- Remote Frame
- Error Frame
- Overload Frame
Data Frame — это наиболее часто используемый тип сообщения. Он состоит из следующих основных частей:
- поле арбитража (arbitration field) определяет приоритет сообщения в случае, когда два или более узлов одновременно пытаются передать данные в сеть. Поле арбитража состоит в свою очередь из:
- для стандарта CAN-2.0A, 11-битного идентификатора + 1 бит RTR (retransmit)
- для стандарта CAN-2.0B, 29-битного идентификатора + 1 бит RTR (retransmit)
Следует отметить, что поле идентификатора, несмотря на свое название никак не идентифицирует само по себе ни узел в сети, ни содержимое поля данных. Для Data кадра бит RTR всегда выставлен в логический ноль (доминантный сигнал).
- поле данных (data field) содержит от 0 до 8 байт данных
- поле CRC (CRC field) содержит 15-битную контрольную сумму сообщения, которая используется для обнаружения ошибок
- слот подтверждения (Acknowledgement Slot) (1 бит), каждый CAN-контроллер, который правильно принял сообщение посылает бит подтверждения в сеть. Узел, который послал сообщение слушает этот бит, и в случае если подтверждение не пришло, повторяет передачу. В случае приема слота подтверждения передающий узел может быть уверен лишь в том, что хотя бы один из узлов в сети правльно принял его сообщение.
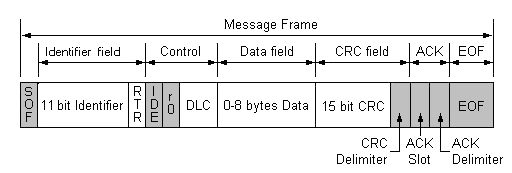 Рис. 2. Data frame стандарта CAN 2.0A.
Рис. 2. Data frame стандарта CAN 2.0A.
Remote Frame — это Data Frame без поля данных и с выставленным битом RTR (1 — рецессивные бит). Основное предназначение Remote кадра — это инициация одним из узлов сети передачи в сеть данных другим узлом. Такая схема позволяет уменьшить суммарный трафик сети. Однако, на практике Remote Frame сейчас используется редко (например, в DeviceNet Remote Frame вовсе не используется).
Error Frame — это сообщение которое явно нарушает формат солобщения CAN. Передача такого сообщения приводит к тому, что все узлы сети регистрируют ошибку формата CAN-кадра, и в свою очередь автоматически передают в сеть Error Frame. Результатом этого процесса является автоматическая повторная передача данных в сеть передающим узлом. Error Frame состоит из поля Error Flag, которое состоит из 6 бит одинакового значения (и таким образом Error frame нарушает проверку Bit Stuffing, см. ниже), и поля Error Delimiter, состоящее из 8 рецессивных битов. Error Delimiter дает возможность другим узлам сети обнаружив Error Frame послать в сеть свой Error Flag.
Overload Frame — повторяет структуру и логику работы Error кадра, с той разницей, что он используется перегруженным узлом, который в данный момент не может обработать поступающее сообщение, и поэтому просит при помощи Overload-кадра о повторной передаче данных. В настоящее время Overload-кадр практически не используется.
Контроль доступа к среде передачи (побитовый арбитраж).
Поле арбитража CAN-кадра используется в CAN для разрешения коллизий доступа к шине методом не деструктивного арбитража. Суть метода не деструктивного арбитража заключается в следующем. В случае, когда несколько контроллеров начинают одновременную передачу CAN кадра в сеть, каждый из них сравнивает, бит, который собирается передать на шину с битом, который пытается передать на шину конкурирующий контроллер. Если значения этих битов равны, оба контроллера передают следующий бит. И так происходит до тех пор, пока значения передаваемых битов не окажутся различными. Теперь контроллер, который передавал логический ноль (более приоритетный сигнал) будет продолжать передачу, а другой (другие) контроллер прервёт свою передачу до того времени, пока шина вновь не освободится. Конечно, если шина в данный момент занята, то контроллер не начнет передачу до момента её освобождения.
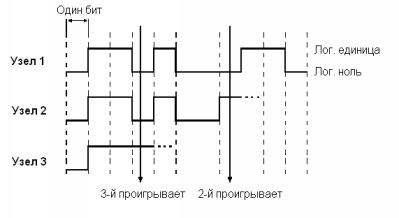 Рис. 3. Побитовый арбитраж на шине CAN.
Рис. 3. Побитовый арбитраж на шине CAN.
Методы обнаружения ошибок.
CAN протокол определяет пять способов обнаружения ошибок в сети:
- Bit monitoring
- Bit stuffing
- Frame check
- ACKnowledgement Check
- CRC Check
Bit monitoring — каждый узел во время передачи битов в сеть сравнивает значение передаваемого им бита со значением бита которое появляется на шине. Если эти значения не совпадают, то узел генерирует ошибку Bit Error. Естественно, что во время арбитража на шине (передача поля арбитража в шину) этот механизм проверки ошибок отключается.
Bit stuffing — когда узел передает последовательно в шину 5 бит с одинаковым значением, то он добавляет шестой бит с противоположным значением. Принимающие узлы этот дополнительный бит удаляют. Если узел обнаруживает на шине больше 5 последовательных бит с одинаковым значением, то он генерирует ошибку Stuff Error.
Frame Check — некоторые части CAN-сообщения имеют одинаковое значение во всех типах сообщений. Т.е. протокол CAN точно определяет какие уровни напряжения и когда должны появляться на шине. Если формат сообщений нарушается, то узлы генерируют ошибку Form Error.
ACKnowledgement Check — каждый узел получив правильное сообщение по сети посылает в сеть доминантный (0) бит. Если же этого не происходит, то передающий узел регистрирует ошибку Acknowledgement Error.
CRC Check — каждое сообщение CAN содержит CRC сумму, и каждый принимающий узел подсчитывает значение CRC для каждого полученного сообщения. Если подсчитанное значение CRC суммы, не совпадает со значением CRC в теле сообщения, принимающий узел генерирует ошибку CRC Error.
Механизм ограничения ошибок (Error confinement).
Каждый узел сети CAN, во время работы пытается обнаружить одну из пяти возможных ошибок. Если ошибка обнаружена, узел передает в сеть Error Frame, разрушая тем самым весь текущий трафик сети (передачу и прием текущего сообщения). Все остальные узлы обнаруживают Error Frame и принимают соответствующие действия (сбрасывают принятое сообщение). Кроме того, каждый узел ведет два счетчика ошибок: Transmit Error Counter (счетчик ошибок передачи) и Receive Error Counter (счетчик ошибок приема). Эти счетчики увеличиваются или уменьшаются в соответствие с несколькими правилами. Сами правила управления счетчиками ошибок достаточно сложны, но сводятся к простому принципу, ошибка передачи приводит к увеличению Transmit Error счетчика на 8, ошибка приема увеличивает счетчик Receive Error на 1, любая корректная передача/прием сообщения уменшают соответствующий счетчик на 1. Эти правила приводят к тому, что счетчик ошибок передачи передающего узла увеличивается быстрее, чем счетчик ошибок приема принимающих узлов. Это правило соответствует предположению о большой вероятности того, что источником ошибок является передающий узел.
Каждый узел CAN сети может находится в одном из трех состояний. Когда узел стартует он находится в состоянии Error Active. Когда, значение хотя бы одного из двух счетчиков ошибок превышает предел 127, узел переходит в состояние Error Passive. Когда значение хотя бы одного из двух счетчиков превышает предел 255, узел переходит в состояние Bus Off.
Узел находящийся в состоянии Error Active в случае обнаружения ошибки на шине передает в сеть Active Error Flags. Active Error Flags сотстоит из 6 доминантных бит, поэтому все узлы его регистрируют. Узел в состоянии Passive Error передает в сеть Passive Error Flags при обнаружении ошибки в сети. Passive Error Flags состоит из 6 рецессивных бит, поэтому остальные узлы сети его не замечают, и Passive Error Flags лишь приводит к увеличению Error счетчика узла. Узел в состоянии Bus Off ничего не передает в сеть (не только Error кадры, но вообще никакие другие).
Адресация и протоколы высокого уровня
В CAN не существует явной адресации сообщений и узлов. Протокол CAN нигде не указывает что поле арбитража (Identification field + RTR) должно использоваться как идентификатор сообщения или узла. Таким образом, идентификаторы сообщений и адреса узлов могут находится в любом поле сообщения (в поле арбитража или в поле данных, или присутствовать и там, и там). Точно также протокол не запрещает использовать поле арбитража для передачи данных.
Утилизация поля арбитража и поля данных, и распределение адресов узлов, идентификаторов сообщений и приоритетов в сети является предметом рассмотрений так называемых протоколов высокого уровня (HLP — Higher Layer Protocols). Название HLP отражает тот факт, что протокол CAN описывает только два нижних уровня эталонной сетевой модели ISO/OSI, а остальные уровни описываются протоколами HLP.
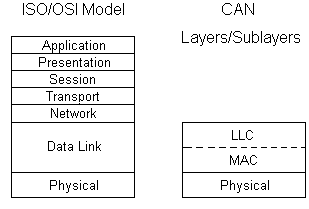 Рис. 4. Логическая структура протокола CAN.
Рис. 4. Логическая структура протокола CAN.
Существует множество таких высокоуровневых протоколов. Наиболее распространенные из них это:
- DeviceNet
- CAL/CANopen
- SDS
- CanKingdom
Физичекий уровень протокола CAN
Физический уровень (Physical Layer) протокола CAN определяет сопротивление кабеля, уровень электрических сигналов в сети и т.п. Существует несколько физических уровней протокола CAN (ISO 11898, ISO 11519, SAE J2411).
В подавляющем большинстве случаев используется физический уровень CAN определенный в стандарте ISO 11898. ISO 11898 в качестве среды передачи определяет двухпроводную дифференциальную линию с импедансом (терминаторы) 120 Ом (допускается колебание импеданса в пределах от 108 Ом до 132 Ом. Физический уровень CAN реализован в специальных чипах — CAN приемо-передатчиках (transceivers), которые преобразуют обычные TTL уровни сигналов используемых CAN-контроллерами в уровни сигналов на шине CAN. Наиболее распространенный CAN приемо-передатчик — Phillips 82C250, который полностью соответствует стандарту ISO 11898.
Махимальная скорость сети CAN в соответствие с протоколом равна 1 Mbit/sec. При скорости в 1 Mbit/sec максимальная длина кабеля равна примерно 40 метрам. Ограничение на длину кабеля связано с конечной скоростью света и механизмом побитового арбитража (во время арбитража все узлы сети должны получать текущий бит передачи одновременно, те сигнал должен успеть распространится по всему кабелю за единичный отсчет времени в сети. Соотношение между скоростью передачи и максимальной длиной кабеля приведено в таблице:
| скорость передачи | максимальная длина сети |
| 1000 Кбит/сек | 40 метров |
| 500 Кбит/сек | 100 метров |
| 250 Кбит/сек | 200 метров |
| 125 Кбит/сек | 500 метров |
| 10 Кбит/сек | 6 километров |
Разъемы для сети CAN до сих пор НЕ СТАНДАРТИЗОВАНЫ. Каждый протокол высокого уровня обычно определяет свой тип разъемов для CAN-сети.
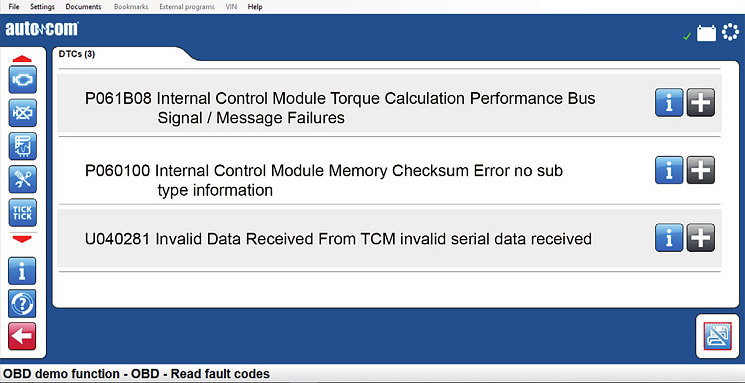
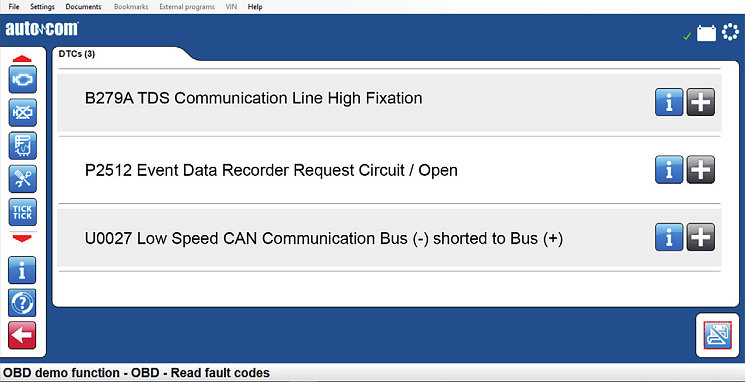
Системные коды ошибок: BUS, OFF, ID, Difference, Line, Checksum, Distorted, Timeout, C3I, C2I, Data и др.
На прошлом уроке мы познакомились с терминами, которые наиболее часто используются для определения неисправностей топливной системы. Давайте теперь проверим домашнее задание и узнаем, правильно ли мы идентифицировали коды ошибок, предложенные в предыдущем уроке.
Bank to Bank Fuel Trim Offset: Переводчик Google интерпретирует этот код ошибки как «Банковское сальдо торгового баланса банка». Именно такое описание этого кода я и обнаружил в одном известном китайском приборе. На самом деле мы уже знаем, что речь идет не о сберегательной кассе, а о V-образном двигателе с двумя блоками и коррекции впрыска топлива в рамках короткого или продолжительного времени, которое не совпадает по разным банкам. В таком случае, скорее всего, нагревательные элементы кислородных датчиков нагреваются с большим временным промежутком, и ЭБУ не уверен, надо ли вести коррекцию в долгосрочном «триме» или же в краткосрочном, поэтому создает такой код.
Component NOx sensor upstream of the SCR catalytic converter: Аббревиатура «SCR» сразу говорит нам о том, что на автомобиле установлена система выборочного дожига вредных веществ в выхлопной трубе с помощью добавления аддитива. Такие обычно устанавливаются на дизелях с высоким экологическим классом. Но в данном случае код сообщает нам о вопросах к компоненту датчика контроля уровня частиц окисла азота в выхлопных газах, который установлен перед катализатором системы SCR. Вероятно, на данном автомобиле имеется еще один датчик после катализатора, ближе к глушителю, который будет определен по слову «downstream». Но не в этом примере.
EGR Metering Orifice restricted: Ключевое слово в данном коде «Orifice». Оно обозначает сужение отверстия внутри трубки. Технология используется на многих дизельных двигателях, например, на Ford, для правильного и точного определения давления с его замером в двух местах трубопровода между выпускным коллектором и клапаном рециркуляции. Если место сужения канала забивается сажей, то возникает этот код ошибки, который может также сигнализировать о залипшем в закрытом положении клапане рециркуляции или же об утечке через клапан EGR.
Torque request via CAN: «Запрос крутящего момента по CAN-шине. Судя по описаниям в технической литературе, может сопровождаться легким потряхиванием и нестабильной работой двигателя. Неисправность связана с проблемой передачи запросов на нужный уровень крутящего момента между блоками управления двигателем и трансмиссией.
Fuel Demand Command Signal Circuit Malfunction: Здесь, надеюсь, трудностей не возникло, и наши постоянные читатели смогли разобраться с возникшей проблемой цепи сигнала запроса на подачу топлива. В данном случае речь идет о проблеме в цепи сигнала драйвера с ЭБУ на форсунки.
Limp Home Mode-Forced idle: При наличии такой ошибки ЭБУ сигнализирует нам о том, что управление двигателем переключено в аварийный режим (Limp Home) с ограничением мощности, а актуатор дроссельной заслонки находится в так называемом положении «быстрого дросселя» или «fast idle». Его открытия достаточно для того, чтобы автомобиль медленно двигался в сторону сервисного центра, но недостаточно для того, чтобы развивать нормальную скорость.
Теперь давайте рассмотрим специализированную лексику, связанную с системными проблемами модулей управления систем. Как правило, возникающие при этом коды ошибок описывают состояние, в котором находится система. Наиболее часто встречающийся термин – «Bus». Он ни в коем случае не связан с городским транспортом. Кроме значения «автобус», это слово имеет более полезное нам значение «шина передачи данных». Данные в сети называются «Data», и не стоит также путать это слово как с календарной датой, так и с электрическим сигналом. Data означает «Информация» в оцифрованном или в аналоговом виде. Если оно упомянуто в коде ошибки, то, скорее всего, неисправность связана с передачей данных по конкретной шине – CAN, LIN, MOST, FLEX и т.д. По какой-то причине автопроизводители не всегда утруждают себя упоминанием, к какой шине относится проблема, поэтому при появлении этого слова стоит вспомнить, в какой сети находится диагностируемый модуль, и тогда устранение неисправности станет проще.
Поскольку передача данных в шинах представляет собой постоянный цифровой поток, то может останавливаться по причине возникновения неисправности. Такое состояние шины будет сразу определено блоком управления, и возникнет код ошибки, сообщающий, что шина выключена, или «OFF». Напомню, что применительно к кодам по электрическим цепям может обозначать разрыв цепи компонента, а в управлении компонентов – прекращение действия.
Идентификатор, или «ID», также часто используется как в описании кодов ошибок, так и в параметрах и в спецификации блока управления. Это слово многозначно, но, как правило, подразумевает собой какой-либо код. Например, код форсунки, серийный номер блока управления или идентификатор компонента. Если, например, мы находим код «ECU lD lost», то это означает потерю синхронизации между какими-то блоками управления.
Также в шине данных может произойти «зависание» передачи информации или же может зависнуть внутренняя программа блока управления. В таком случае появится код ошибки со словом «Stall». Это же слово часто упоминается в описании процедур специальных тестов в смысле «заглохнуть» для двигателя. На моем опыте микропрограммы блоков управления имеют тенденцию к «зависанию» по причинам попадания внутрь влаги, а чаще из-за некачественного чипования блоков или восстановления их компонентов. Сбой программы может быть выражен тем, что процессор не может посчитать контрольную сумму и выдает код со словом «Checksum». В таком случае производители рекомендуют менять блоки управления, но я бы попробовал перегрузить программу с помощью процедуры сброса питания с АКБ или перепрограммирования. В случае если блок управления не может перегрузить программу либо запустить ее, или же выполняются какие-то исполнительные функции, то может возникнуть ошибка времени с пометкой «Timeout». Проблема, скорее всего, будет связана с неисправностью компонента на плате модуля, и ее частое появление может привести к полному выходу блока из строя.
В некоторых случаях сигнал по шине данных может проходить, но часть информации может быть потеряна по каким-то причинам или не доходит до адресата. В таком случае может появиться код со словами искажения сообщения «Message distorted».
При диагностике дизельных систем топливного впрыска производства Delphi может возникнуть ошибка типа «C3I Missed». С2I и C3I – это системы кодов точности, присвоенный индивидуально каждой форсунке, который необходимо прописывать в память блока управления после замены форсунок или самого блока. Он наносится на корпус каждой форсунки, и третье поколение имеет большую точность и соответственно более длинный код. Слово «Miss» означает «Пропускание» и довольно часто используется в кодах ошибок по пропускам зажигания, неправильной синхронизации зубчатого ремня, шестерни или потери каких-то данных. Это же слово может использоваться при указании на потерю какого-либо входящего сигнала. В приведенном выше примере речь идет о неправильно закодированной форсунке.
В современных блоках управления программа устроена таким образом, что она анализирует входящие сигналы и сравнивает их с теми, что должны быть ожидаемыми в конкретной ситуации. Если ожидаемый обратный сигнал (feedback) не соответствует правильному или выходит за ограниченный разработчиками диапазон, может возникнуть код со словом «Difference» или «Different» – «Разный, отличный». Это же слово используется при описании сигналов парных компонентов, например, датчиков педали газа, кислородных датчиков и т.д., если подтверждающие друг друга сигналы не подтверждают друг друга.
Выучив небольшой словарик ниже, вы будете вооружены для работы с системными кодами ошибок в англоязычных программах. Теперь давайте потренируемся на паре примеров. Разберем их на следующем уроке.
Словарь для запоминания
BUS шина данных.
Data цифровая информация.
OFF отключение, разрыв.
ID идентификатор.
Stall зависание, заглохнуть.
Checksum контрольная сумма.
Timeout прерывание работы программы, прекращение времени ожидания.
Message сообщение.
Distort искажать.
C2i, C3i система кодировок дизельных форсунок DELPHI.
Miss пропуск, потеря.
Different разный.

Skip to main content.
|
|
ИНТЕНТ ИНЖЕНЕРНАЯ ПЕРЕВОДЧЕСКАЯ КОМПАНИЯ Основана в 1993 г. |
СПРАВОЧНИК ТЕХНИЧЕСКОГО ПЕРЕВОДЧИКА |
|
|
Тематики
EN
|
Спонсоры
Подробности здесь: http://tsbook.gigatran.com/
Учебник-справочник по электротехническому переводу EN>RU. Часть 1
Подробности здесь: http://tsbook.gigatran.com/
© 2009-2023 Интент
Разработка: gigatran.com
25.01.2015 19:37
#1
Подскажите ошибка по OBD-II u1073
Недавно проверил сканером ошибки вылезла u1073 по CAN — шине, кто что толкового подскажет, все работает, чек не горит авто работает без нареканий. Мицубиси Кольт в кузове 25
26.01.2015 09:29
#2
U1073 -отключение шины данных CAN (Bus off)
возможная причина — проводка или разъем. имеется в виду всё по шине от блока ETACS (находится в салоне под передней панелью).Т.е. где-то пропадал контакт… Сбросить ошибку, через некоторое время проверить — если вылезет снова — проверять контакты в разъемах. Если нет, то ездить и радоваться..
MMC Colt Plus Re:lax Edition 1.5 CVT
А жизнь все чудесатее и ноги волосатее
Welcome to the CAN-bus Wiki project
CAN Bus-Off condition/ state
BusOff is an error state of the CAN Controller. Only the transmitter can switch in the state BusOff, if the Transmit Error Counter exceeds 255.
(more details needed on this place)
In real life a CAN controller can switch in the mode ErrorPassive sporadic. But the mode BusOff is a critical error and should never arrive without a hardware error or an other critical error.
Jean-Yves Berenger Berenger@nsi.fr:
there are 2 different ways to recover from bus off :
-
automatically after 128 occurrence of 11 consecutive ‘recessive’ bits have been monitored on the bus. (BOSCH CAN 2.0B §8.12)
-
A node can start the recovery from »bus off« state only upon a user request. (ISO11898-1 §6.15)
That’s right that we can find on the market these 2 ways according the used CAN core. This difference must be taken in account to have the same behavior in drivers and network management according the choosen CAN controller
John Dammeyer johnd@autoartisans.com:
There is actually no difference. Whether the node goes automatically bus off and needs processor intervention to put it back bus on (SJA1000) or goes automatically back to bus on but creates an interrupt that it went bus off (MCP2510) both nodes are required to wait 128 * 11 bits before they can actively participate in bus communication.
If that were not the case then a node with a defective receiver would try to send, go bus off, then go bus on again and try to send thereby
using 100% of the bus. The 128 * 11 makes it possible for 128 other messages to sneak through while this defective node goes through its bus
on/off cycle.
The interesting thing about handling bus off situations is that on a wired CAN bus, unless there has been a major bus disturbance, the bus
off situation almost never happens. But you’d better write code for that worst case scenario.
Anastasios Tsitlakidis proirl@gmx.net:
The ISO states that auto-bus on is not required, i.e. devices with auto-bus on feature are not 11898 compliant. We had this discussion with the Motorola TouCAN (which is still not conformance tested) and other CAN-contoller-cores. I heard also from several sources from CAN-industry that auto-bus-on is not wished very often. It makes more sense to let the application decide what should happen. Especially in the automotive-sector the auto-bus-on-feature is very negative.
Heinz-Jürgen Oertel oe@port.de:
I would support Anastasios. We always suggest our customers, in the case our driver reports the BusOff situation to the application, the application should wait a bit more than required by the ISO and additional have a counter for the bus-on again retry. If the device goes BusOff again and again, application should stop using CAN.

Добавил:
Upload
Опубликованный материал нарушает ваши авторские права? Сообщите нам.
Вуз:
Предмет:
Файл:
Скачиваний:
41
Добавлен:
16.05.2015
Размер:
1.1 Mб
Скачать
![]()
Процесс передачи данных
Все получатели принимают послание с данными о параметрах двигателя и проверяют его на наличие ошибок на уровне контроля. При этом распознаются локальные нарушения в процессе передачи данных, которые могут возникнуть, например, только в одном блоке управления. Благодаря этому обеспечивается высокая плотность потока передаваемой информации (см. также раздел «Надежность передачи данных и помехоустойчивость»).
Все подключенные к шине станции получают послание от блока управления двигателем (по принципу широковещательной трансляции). После этого они могут определить на контрольном уровне по сумме CRC (Cycling Redundancy Check), нет ли в послании ошибок передачи. При передаче каждого послания формируется и передается контрольная сумма размером 16 бит, которая несет информацию о всем объеме информации.
Абоненты пересчитывают контрольную сумму по тем же правилам, по которым она была образована. В заключение полученная контрольная сумма сравнивается с рассчитанной суммой.
Если ошибки не обнаружено, все станции направляют передатчику уведомление в получении послания, которое называется Acknowledge и следует за контрольной суммой.
Подтверждение (2 бит Ack)
Acknowledge
|
Поток информации, подтверждение, почтовый штемпель |
238_026 |
Затем корректно принятое послание переводится на так называемый уровень признания данного модуля системы CAN.
•На этом уровне определяется возможность использования послания для конкретного блока управления.
•Если получен отрицательный ответ, послание отбрасывается.
•При положительном ответе послание направляется в соответствующий входной почтовый ящик.
По поднятому «приемному флажку» подключенный к шине блок управления в комбинации приборов «узнает» о поступлении нужного послания. В данном случае это данные о частоте вращения, которые подлежат обработке.
Комбинация приборов вызывает это послание и копирует соответствующее значение во входном запоминающем устройстве.
На этом передача и прием посланий посредством шины CAN заканчивается.
•В комбинации приборов данные о частоте вращения подвергаются обработке и направляются затем на тахометр.
•Передача данных в виде посланий постоянно повторяется с заданной периодичностью циклов (например, каждые 10 мс).
21

Процесс передачи данных
Исключение наложений посланий от нескольких блоков управления
Если несколько блоков управления пытаются одновременно отправить послания, при прочих равных условиях невозможно избежать накладки передаваемых данных. Чтобы исключить накладку, шина CAN действует в соответствии с описанной ниже стратегией.
Каждый из активных блоков управления начинает процесс передачи данных с ввода идентификатора.
Все блоки управления следят за состоянием шины, считывая с нее данные через провод RX.
Каждый из блоков управления сравнивает бит за битом сигналы, передаваемые через провод TX с сигналами, передаваемыми через провод RX. При этом могут быть обнаружены определенные расхождения.
В соответствии с принятой для шины CAN стратегией ситуация регулируется следующим образом: блок управления, сигнал которого на проводе TX обнуляется, должен прервать передачу данных через шину.
Число нулей в головной части идентификатора определяет ранг приоритета послания. Передача посланий производится в порядке, соответствующем их рангу.
При этом действует правило: чем меньше число, обозначающее идентификатор, тем важнее послание.
Этот способ оценки называют арбитражем. Этот термин является производным от слова арбитр или спортивный судья.
|
Блок |
TX |
доступ к шине сохраняется, |
|||||||||
|
управления |
|||||||||||
|
действует режим |
|||||||||||
|
двигателем |
RX |
||||||||||
|
передатчика |
|||||||||||
|
Блок |
TX |
доступ к шине прекращается, |
|||||||||
|
управления |
RX |
действует режим приемника |
|||||||||
|
АБС |
|||||||||||
|
Комбинация |
TX |
доступ к шине прекращается, |
|||||||||
|
приборов |
RX |
действует режим приемника |
|||||||||
Провод шины CAN
|
Процесс арбитражного разбора, исключающий накладку посланий |
238_027 |
22

Процесс передачи данных
На следующем примере демонстрируется наивысший приоритет датчика поворота рулевого колеса, благодаря которому вырабатываемые им данные отправляются в первую очередь.
Пояснение: послание с датчика поворота рулевого колеса, сопровождаемое идентификатором, обозначаемым наименьшим числом (с наибольшим числом нулей в его начале), отправляется в первую очередь.
Двигатель
Тормозная система
Комб:ция приборов
Д. угла пов. рул. к:а
Коробка передач
238_027b
Идентификаторы, используемые в системе CAN силового агрегата
Заключение по разделу о передаче сигналов датчиков (например, датчика частоты вращения коленчатого вала)
Передача данных через шину CAN достаточно надежна. В результате распознаются практически все помехи, возникающие, например, из:за нарушений в электрических цепях или разрывов в системе CAN.
•Данные о частоте вращения 1800 об/мин передаются абсолютно точно или из:за помех вообще не выводятся на тахометр.
•Если, например, выводятся какие:либо неприемлемые значения частоты вращения, неисправность следует искать не в системе CAN, а в датчике, в тахометре или в соединительных проводах.
23
Надежность передачи данных, помехоустойчивость
Внутренняя защита от помех
Чтобы надежно защитить систему от ошибок, в ней предусмотрен комплекс специальных средств.
Эти средства обеспечивают высокую надежность распознавания ошибок при передаче данных. При этом могут быть приняты соответствующие меры.
Доля нераспознанных ошибок, т. е. вероятность их остатка не превышает 10:12 . Эта величина соответствует четырем ошибкам за весь срок службы автомобиля.
Широковещательный способ передачи данных (когда один участник передает данные, а все остальные их принимают) позволяет передавать без промедления сообщение об обнаруженной одним участником ошибке другим участникам. Для этого используется так называемый фрейм ошибок (Error:Frame).
При обнаружении ошибки все участники отбрасывают текущее послание.
Затем автоматически производится повторение передачи данных. Этот процесс рассматривается как обычное явление при эксплуатации автомобиля, так как помехи передаче данных постоянно возникают, например, вследствие сильных колебаний напряжения в бортовой сети при пуске двигателя или под действием внешних источников.
Ситуация может, однако, может оказаться критической из:за учащенного повторения передачи данных при постоянном распознавании ошибок.
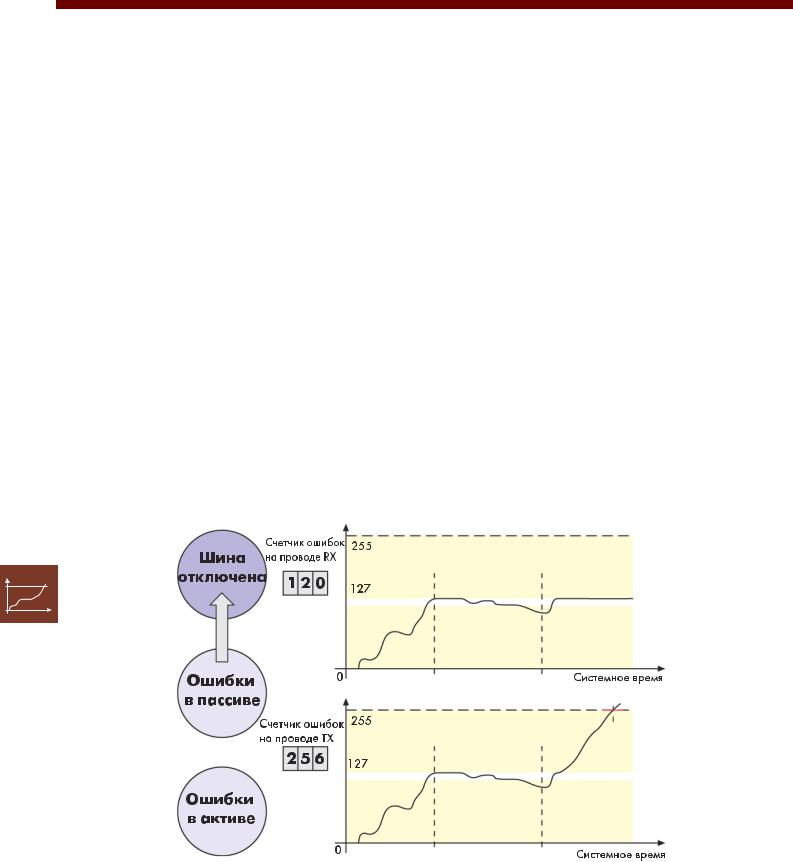
Поэтому каждая станция оснащена встроенным в нее счетчиком ошибок, который суммирует их число, а при удачной передаче данных соответственно уменьшает суммарное значение.
Блок
управления
отключен
Введен запрет на передачу
Нормальное
состояние
|
Возникновение |
Ошибки отсутс: |
Чрезмерное накопление |
|
новых ошибок, |
твуют, счетчик |
ошибок, переполнение |
|
счетчик сумми: |
снижает их |
счетчика |
|
рует их число |
суммарное |
|
|
Встроенный счетчик ошибок |
значение |
238_028 |
24

Надежность передачи данных, помехоустойчивость
Встроенный счетчик ошибок служит только для внутренней защиты от помех и не контролируется извне.
После двухкратного отключения шины (при отсутствии коммуникации между отключениями) делается соответствующая запись в регистраторе неисправностей.
По прошествии установленного времени выжидания (около 0,2 с) производится попытка нового подключения блока управления к шине.
В дальнейшем попытки подключения периодически повторяются через определенные промежутки времени.
Таким образом достигается своевременная передача посланий.
Если все же произошла задержка в получении более десяти посланий, включается так называемая блокировка по времени (тайм:аут в передаче посланий).
После этого так же делается запись в регистраторе неисправностей принимающего блока управления.
Так действует второй механизм защиты от помех. При проведении диагностики на станции обслуживания автомобилей могут быть получены следующие сообщения:
1. Шина данных неисправна.
В соответствующем блоке управления обнаружена существенная неисправность.
Блок управления был не менее двух раз отключен от шины (Bus:Off).
2. Не принимаются послания от … или нет связи с соответствующим блоком управления.
Послания принимаются с задержкой. Включена блокировка по времени (тайм:аут).
25
Надежность передачи данных, помехоустойчивость
Указания по диагностике на примере передачи данных частоты вращения коленчатого вала
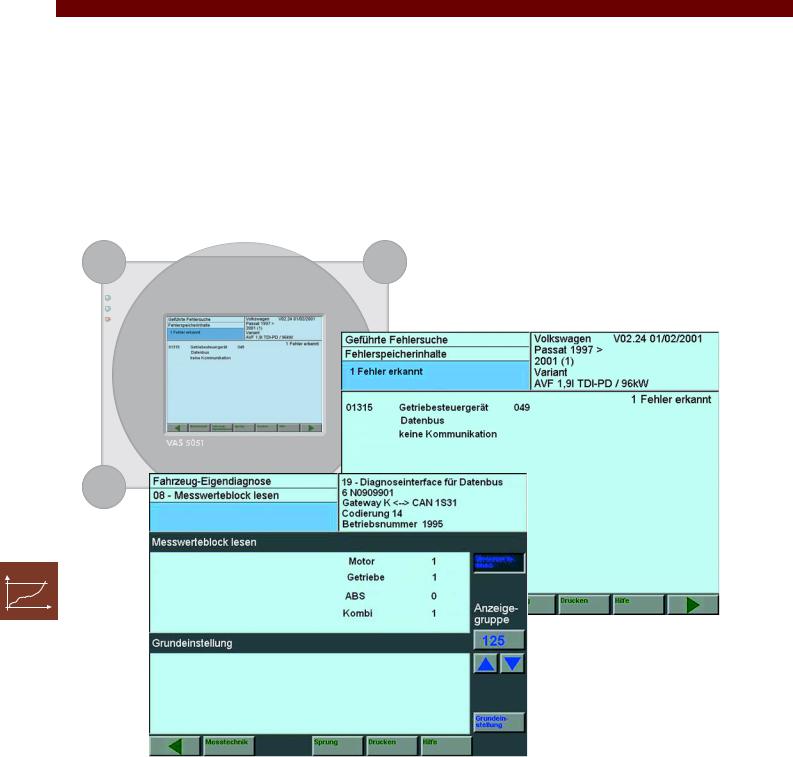
• Значение частоты вращения передается без искажения или при помехе вообще не выводится на тахометр.
В этом случае автомобильная измерительная и диагностическая система VAS 5051 указывает на неисправность в системе шины CAN:
238_029a
238_029b
238_029c
Сообщения на дисплее системы VAS 5051
• Если, например, выводятся заведомо неверные данные о частоте вращения, не следует искать ошибку при их передаче через шину CAN. Неисправными могут быть только датчик или исполнительное устройство (в данном случае это тахометр).
26

Надежность передачи данных, помехоустойчивость
Если действительно вышла из строя система CAN, автомобильная измерительная и диагностическая система VAS 5051 выводит сообщение о неисправности общего характера.
На основании этого сообщения определить неисправный компонент системы CAN невозможно.
Чтобы найти неисправность, необходимо через блоки данных измерений 125 и 126 шлюза определить, какие из блоков управления находятся в активном состоянии (1 — активный, 0 — пассивный).
При необходимости следует произвести дополнительные измерения (например, проверить сигналы с помощью осциллографа).
Перспективы
Вданной Программе самообучения SSP 238 описаны основные функции системы CAN. В Программе SSP 269 «Обмен данными посредством системы CAN II с шинами силового агрегата и системы «Комфорт»» описан вариант системы CAN, реализованной на автомобилях Volkswagen и Audi. В этой же Программе особое внимание уделено особенностям работы и диагностики шин CAN силового агрегата и системы «Комфорт». В заключение объяснено действие всей системы, у которой шины CAN силового агрегата и системы «Комфорт» связаны через шлюз.
Впоследней Программе описана также последовательность действий при поиске неисправностей.
27

Проверьте ваши знания
1.Почему на автомобиле применяются системы шин данных?
AИз:за постоянного усложнения автомобильной электроники.
B Ввиду возможности простого подключения дополнительного оборудования.
CВ соответствии с требованиями законодателя.
2.Какова скорость передачи данных через шину данных CAN силового агрегата?
|
A |
10 кбит/с |
|
B |
100 кбит/с |
|
C |
500 кбит/с |
|
3. |
Диагностический прибор VAS 5051 позволяет помимо прочего обнаружить … |
|
A |
неисправности проводки шины CAN. |
|
B |
ошибки в аппаратном обеспечении шины CAN. |
Cошибки данных, выводимых на указатели.
4.Какие послания принимаются и проверяются блоками управлениями?
|
A |
Только послания, предназначенные для определенных блоков управления. |
|
|
B |
Все отправленные через шину послания. |
|
|
C |
Только послания, имеющие наивысший приоритет. |
|
|
5. |
Три блока управления, находящиеся в ожидании освобождения шины … |
|
|
A |
… могут одновременно нгачинать отправления их послания. |
B… передают послания при возможности накладки передаваемых данных.
C… отправляют послания по очереди, определяемой посредством арбитража.
28

Проверьте ваши знания
6.Что означает понятие Bus<OFF (шина закрыта)?
A Все абоненты шины отключены.
B 
 Один из абонентов временно отключается от шины.
Один из абонентов временно отключается от шины.
C Шина закрыта для всех абонентов.
7.Для чего служит счетчик ошибок?
A Для подсчета посланий, отправляемых через шину CAN.
B 
 Для определении числа ошибок, при котором производится отключение от шины.
Для определении числа ошибок, при котором производится отключение от шины.
C Для ведения статистики ошибок.
8.Что означает понятие «Наивысшая надежность передачи данных» при характеристике системы CAN?
A Ошибки при передаче данных никогда не возникают.
B 
 Ошибки при передаче данных всегда обнаруживаются.
Ошибки при передаче данных всегда обнаруживаются.
C При обнаружении ошибки все абоненты шины получают соответствующее извещение.
9.Идентификатор передаваемого через шину CAN послания …
A … содержит его название и ранг приоритета.
B 
 … содержит адрес абонента.
… содержит адрес абонента.
C … служит для управления очередностью его получения.
10.Протокол служит для …
A … обеспечения передачи данных.
B 
 … обнаружения ошибок.
… обнаружения ошибок.
C … управления очередностью получения данных.
29

Глоссарий
ACK:
Acknowledge, подтверждение получения корректного послания. Производится вводом доминантного бита всеми абонентами шины данных.
CAN:
Controller#Area#Network <197> это система шин данных, связывающая блоки управления в локальную сеть.
CRC:
Cyclic#Redundancy#Check — это контрольная сумма (16 бит), по которой определяется ошибка в передаваемых данных.
Error#Frame:
Это сообщение об ошибке (больше шести доминантных бит), сигнализирующее об ошибке в передаче данных.
Арбитраж:
Это механизм исключения накладок при попытках одновременного отправления посланий несколькими абонентами. Арбитраж устанавливает порядок передачи посланий в соответствии с их значимостью.
Входной ящик:
Это накопитель, служащий для записи посланий, принятых модулем CAN.
Датчики:
Это приборы, которые служат для регистрации эксплуатационных параметров автомобиля.
Идентификатор:
Это головная часть каждого послания, которая служит для его обозначения и для определения его приоритета.
Исполнительные устройства:
Это компоненты автомобиля, которые входят в системы регулирования в качестве силовых элементов или выполняют функции указателей.
Кабель «К»:
Этот кабель служит для связи блоков управления с диагностической колодкой автомобиля, служащей для подключения диагностических приборов VAS.
Логический уровень:
Он определяется состоянием «0» или «1» в узловых точках системы.
Микроконтроллер:
Это вычислительная система, выполненная на одном кристалле и содержащая центральный процессор, запоминающее устройство и устройства ввода и вывода.
Модуль системы CAN:
Этот модуль обеспечивает обмен данными посредством шины CAN.
Область признания:
Эта область используется для фильтрации принимаемых посланий, которые предназначены для данного блока управления.
Послание:
Это пакет данных, передаваемых каким#либо блоком управления.
Передающий почтовый ящик:
Это накопитель, служащий для записи отправляемых блоком управления посланий в модуле системы CAN.
Провод RX:
Это провод, соединяющий модуль системы CAN с трансивером со стороны приема данных.
Провод TX:
Это провод, соединяющий модуль системы CAN с трансивером со стороны передачи данных.
Провод шины:
Это соединительный провод, две медные жилы которого перевиты между собой. Он служит для связи между блоками управления.
Регистратор неисправностей:
Это часть блока управления. Записанные в нем данные выводятся с помощью диагностических приборов VAS.
Состояние «Bus#off»:
Состояние блока управления, при котором он отключается от шины при переполнении встроенного счетчика ошибок.
Тайм#аут при передаче послания:
Контроль времени со стороны получателей посланий.
Трансивер:
Это электронное приемопередающее устройство с усилителем, служащее для подключения блока управления к шине данных.
Уровень сигнала:
Это напряжение, действующее при передаче сигнала по проводу.
Шина CAN силового агрегата:
Это подсистема системы CAN, связывающая блоки управления двигателем, трансмиссией и АБС.
Шина CAN системы «Комфорт»:
Это подсистема системы CAN, связывающая блоки управления системы «Комфорт».
Шина CAN информационно#командной системы:
Это подсистема системы CAN, связывающая блоки управления радиоаппаратуры и информационной системы.
Широковещательный принцип:
Это принцип передачи информации, когда один участник ее передает, а все другие принимают.
30
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #