Improve Article
Save Article
Improve Article
Save Article
Signals in computers are a way of communication between the process and the OS. When a running program undergoes some serious error then the OS sends a signal to the process and the process further may not execute. Some processes may have a signal handler that does some important tasks before the process leaves the CPU.
Signal and interrupt are basically the same but a small distinction exists i.e interrupts are generated by the processor and handled by the kernel but signals are generated by the kernel and handled by the process. Error signals generally cause termination of the program and a core dump file is created named core, which stores the state of the process at the moment of termination. This file can be investigated using the debugger to know the cause of program termination.
Error signals:
- SIGFPE –
This error signal denotes some arithmetic error that occurred like division by zero, or floating-point error. If a program stores integer data in a location that is then used as a floating-point operation, this causes an “invalid operation” exception as the processor cannot recognize the data as a floating-point value. But this signal does not specify the type of floating-point error.
- SIGILL –
This signal denotes illegal instruction. When a garbage instruction or instruction that a program has no privilege to execute, is executed then this signal is generated. C does not produce illegal instruction so there is no chance of facing such an error signal, as the probable cause may be that the object file may be corrupted. This signal is also generated when a stack overflow occurs.
- SIGSEGV –
The signal is generated when a process tries to access a memory location not allocated to it, like de-referencing a wild pointer which leads to a “segmentation fault”. The signal is only generated when a program goes far from its memory space so that it can be detected by the memory protection mechanism.
The name is an abbreviation for “segmentation violation”. - SIGBUS –
The name is an abbreviation for “Bus error”. This signal is also produced when an invalid memory is accessed. It may seem to be the same as SIGSEGV but in SIGSEGV, the memory location referenced is valid but in the case of SIGBUS, memory referenced does not exist i.e de-referencing a memory location out of memory space.
- SIGABRT –
If an error itself is detected by the program then this signal is generated using call to abort(). This signal is also used by the standard library to report an internal error. assert() function in c++ also uses abort() to generate this signal.
C++
#include <iostream>
using namespace std;
int main() {
int arr[5] = {1, 2, 3, 4, 5};
arr[6] = 6;
return 0;
}
Output:
Abort signal from abort(3) (SIGABRT)
- SIGSYS –
This signal is sent to process when an invalid argument is passed to a system call.
- SIGTRAP –
This signal is sent to process when an exception has occurred. This is requested by the debugger to get informed. For example, if a variable changes its value then this will trigger it.
Refer for – Segmentation Fault (SIGSEGV) vs Bus Error (SIGBUS)
Improve Article
Save Article
Improve Article
Save Article
Signals in computers are a way of communication between the process and the OS. When a running program undergoes some serious error then the OS sends a signal to the process and the process further may not execute. Some processes may have a signal handler that does some important tasks before the process leaves the CPU.
Signal and interrupt are basically the same but a small distinction exists i.e interrupts are generated by the processor and handled by the kernel but signals are generated by the kernel and handled by the process. Error signals generally cause termination of the program and a core dump file is created named core, which stores the state of the process at the moment of termination. This file can be investigated using the debugger to know the cause of program termination.
Error signals:
- SIGFPE –
This error signal denotes some arithmetic error that occurred like division by zero, or floating-point error. If a program stores integer data in a location that is then used as a floating-point operation, this causes an “invalid operation” exception as the processor cannot recognize the data as a floating-point value. But this signal does not specify the type of floating-point error.
- SIGILL –
This signal denotes illegal instruction. When a garbage instruction or instruction that a program has no privilege to execute, is executed then this signal is generated. C does not produce illegal instruction so there is no chance of facing such an error signal, as the probable cause may be that the object file may be corrupted. This signal is also generated when a stack overflow occurs.
- SIGSEGV –
The signal is generated when a process tries to access a memory location not allocated to it, like de-referencing a wild pointer which leads to a “segmentation fault”. The signal is only generated when a program goes far from its memory space so that it can be detected by the memory protection mechanism.
The name is an abbreviation for “segmentation violation”. - SIGBUS –
The name is an abbreviation for “Bus error”. This signal is also produced when an invalid memory is accessed. It may seem to be the same as SIGSEGV but in SIGSEGV, the memory location referenced is valid but in the case of SIGBUS, memory referenced does not exist i.e de-referencing a memory location out of memory space.
- SIGABRT –
If an error itself is detected by the program then this signal is generated using call to abort(). This signal is also used by the standard library to report an internal error. assert() function in c++ also uses abort() to generate this signal.
C++
#include <iostream>
using namespace std;
int main() {
int arr[5] = {1, 2, 3, 4, 5};
arr[6] = 6;
return 0;
}
Output:
Abort signal from abort(3) (SIGABRT)
- SIGSYS –
This signal is sent to process when an invalid argument is passed to a system call.
- SIGTRAP –
This signal is sent to process when an exception has occurred. This is requested by the debugger to get informed. For example, if a variable changes its value then this will trigger it.
Refer for – Segmentation Fault (SIGSEGV) vs Bus Error (SIGBUS)
сигнал ошибки
- сигнал ошибки
-
сигнал рассогласования
Словарь русских синонимов по технологиям автоматического контроля.
.
1981.
Смотреть что такое «сигнал ошибки» в других словарях:
-
сигнал ошибки — — [Я.Н.Лугинский, М.С.Фези Жилинская, Ю.С.Кабиров. Англо русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.] Тематики электротехника, основные понятия EN error signal … Справочник технического переводчика
-
сигнал ошибки — klaidos signalas statusas T sritis automatika atitikmenys: angl. error signal vok. Fehlersignal, n rus. сигнал ошибки, m pranc. signal d erreur, m … Automatikos terminų žodynas
-
сигнал ошибки — klaidos signalas statusas T sritis fizika atitikmenys: angl. error signal vok. Fehlersignal, n rus. сигнал ошибки, m pranc. signal d’erreur, m … Fizikos terminų žodynas
-
сигнал ошибки при передаче — — [Я.Н.Лугинский, М.С.Фези Жилинская, Ю.С.Кабиров. Англо русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.] Тематики электротехника, основные понятия EN transmission error alarm … Справочник технического переводчика
-
сигнал рассогласования — сигнал ошибки … Словарь русских синонимов по технологиям автоматического контроля
-
Ошибки первого и второго рода — Ошибки первого рода (англ. type I errors, α errors, false positives) и ошибки второго рода (англ. type II errors, β errors, false negatives) в математической статистике это ключевые понятия задач проверки статистических гипотез.… … Википедия
-
сигнал тревоги — Сигнал, передаваемый устройством при обнаружении ошибки или получении сигнала тревоги от другого устройства. [http://www.lexikon.ru/dict/net/index.html] Тематики сети вычислительные EN Alarm Indication SignalAIS … Справочник технического переводчика
-
сигнал — 3.4 сигнал (signal): Воздействие на органы чувств оператора, характеризующее состояние или изменение состояния производственного оборудования. Настоящий стандарт описывает сигналы, распознаваемые органами зрения (видеодисплей), слуха… … Словарь-справочник терминов нормативно-технической документации
-
сигнал тревоги — 3.1 сигнал тревоги (alert): Моментальное оповещение о том, что информационная система и сеть подвергаются атаке или находятся в опасности вследствие несчастного случая, сбоя или ошибки человека. Источник … Словарь-справочник терминов нормативно-технической документации
-
выходной сигнал — 3.8 выходной сигнал (output signal): Сигнал, генерируемый двуручным устройством управления, который обеспечивает управление машиной и основан на одной паре входных сигналов (см. рисунок 1). Источник … Словарь-справочник терминов нормативно-технической документации
Сигнал — ошибка
Cтраница 1
Сигнал ошибки, обнаруженный в этой точке, поступает в регистр ошибок того канала, признак работы которого установлен в регистре БС ЦП.
[1]
Сигнал ошибки в виде постоянного напряжения подается на реактивную лампу, а та изменяет частоту управляемого генератора так, чтобы иметь на выходе диапазонного делителя частоты сигнал с частотой 1 кгц. Коэффициент деления диапазонного делителя частоты устанавливается с помощью трех переключателей, каждый из которых связан с соответствующей декадой делителя.
[2]
Сигнал ошибки с фазового детектора усиливает сервоусилителем н поступает на эл. Если сигнал местного генератора имеет небольшое постоянное смещение частоты относительно эталона ( принятого сигнала), то фазовращатель вращается с постоянной скоростью, пропорциональной этому смещению.
[3]
Сигнал ошибки является исключительно важным параметром следящего привода, так как его величина определяет скорость движения и быстродействие привода, а знак — направление движения.
[5]
Сигнал ошибки в подается через блоки БПЗ и БП4 в схему маятника с управляемой частотой ( рис. 8 — 8 а) и стабилизирует амплитуду колебаний. На вход интегратора БИ2 через делитель Д и контакты трехпозиционного поляризованного реле РП может подаваться сигнал либо положительной, либо отрицательной обратной связи.
[6]
Сигнал ошибки имеет две компоненты, сдвинутые на 90, знак которых зависит от направления разбаланса двух шкал моста.
[8]
Сигнал ошибки, снимаемый с контрольного делителя Rl, Д2, управляет величиной коэфф. К усилителя напряжения ( в качестве к-рого может быть использован пентод с перем.
[10]
Сигнал ошибки, снимаемый с контрольного делителя Л, Й2, управляет величиной коэфф. К усилителя напряжения ( в качестве к-рого может быть использован пентод с перем.
[12]
Сигнал ошибки поступает на вход последовательного корректирующего звена, образуемого Т — образным контуром. Так как входное сопротивление первого каскада усилителя ( триод 6Ж8) очень велико, то корректирующий Т — образный контур можно считать звеном направленного действия с передаточной — функцией.
[13]
Сигнал ошибки усиливается и поступает через усилитель У на приводной двигатель М, который стремится свести к нулю рассогласование следящей системы. Поэтому движение исполнительного органа станка в направлении подачи s всегда происходит в полном соответствии с количеством и частотой импульсов, поступающих на вход реверсивного счетчика.
[14]
Сигнал ошибки поступает на преобразователь код-аналог, являющийся составной частью системы; на выходе преобразователя также получают сигнал ошибки, но уже в аналоговой форме, как правило, в виде электрической величины. После усиления сигнал ошибки подается на двигатель, ось которого, вращаясь, ликвидирует рассогласование.
[15]
Страницы:
1
2
3
4
5
Макеты страниц
Полезный отклик и сигнал ошибки
Адаптивный линейный сумматор можно использовать в системах как с обратной, так и без обратной связи. Как отмечалось при рассмотрении рис. 1.2, процесс коррекции вектора весовых коэффициентов в системе без обратной связи в явном виде не зависит от выходного сигнала и определяется только входным сигналом и состоянием окружающей среды.
Однако в системе с обратной связью, показанной на рис. 1.3, вектор весовых коэффициентов зависит от выходного сигнала, а также от других данных. Вообще в адаптивном линейном сумматоре другими данными являются полезный отклик или обучающий сигнал. В данной книге обсуждаются прежде всего системы с функциональной обратной связью, поэтому необходимо четкое понимание существа этих сигналов.
В процессе адаптации с функциональной обратной связью вектор весовых коэффициентов линейного сумматора корректируется таким образом, чтобы выходной сигнал  имел наилучшее приближение к полезному отклику. Для этого выходной сигнал сравнивается с полезным откликом, формируется сигнал ошибки и затем корректируется или оптимизируется вектор весовых коэффициентов, минимизирующий сигнал ошибки. В большинстве практических случаев процесс адаптации направлен на минимизацию среднеквадратического значения, иди средней мощности сигнала ошибки.
имел наилучшее приближение к полезному отклику. Для этого выходной сигнал сравнивается с полезным откликом, формируется сигнал ошибки и затем корректируется или оптимизируется вектор весовых коэффициентов, минимизирующий сигнал ошибки. В большинстве практических случаев процесс адаптации направлен на минимизацию среднеквадратического значения, иди средней мощности сигнала ошибки.

Рис. 2.4. Сигналы полезного отклика и ошибки в адаптивном линейном сумматоре с многими входами
Оптимизация по этому критерию как в адаптивных, так и в неадаптивных системах давно и широко применяется и имеет много достоинств [1,8-16].
На рис. 2.4 показан способ получения сигнала ошибки в системе с многими входами за счет введения полезного отклика. Для формирования сигнала ошибка ел выходной сигнал  просто вычитается из полезного сигнала
просто вычитается из полезного сигнала 
Источник сигиала полезного отклика  определяется конкретным применением адаптивного сумматора. Пока будем считать, что такой сигнал уже имеется. Более подробно вопрос его формирования рассматривается в последующих главах. Однако отметим, что зачастую для того, чтобы найти подходящий сигнал, требуется значительная изобретательность, поскольку если бы в действительности полезный сигнал имелся, то адаптивная система была бы не нужна.
определяется конкретным применением адаптивного сумматора. Пока будем считать, что такой сигнал уже имеется. Более подробно вопрос его формирования рассматривается в последующих главах. Однако отметим, что зачастую для того, чтобы найти подходящий сигнал, требуется значительная изобретательность, поскольку если бы в действительности полезный сигнал имелся, то адаптивная система была бы не нужна.
Рассмотрим теперь только что введенную рабочую функцию.
Принцип обратной связи
По-новому
решить задачу повышения точности
автоматических систем позволяет
применение в них принципа обратной
связи. В самом общем виде обратная связь
— это осуществление в цепи взаимосвязанных
событий влияния со стороны последующего
события на одно из ему предшествующих,
т. е. замыкание цепочки событий в кольцо
(рис. 27). Если характер этого влияния
стимулирует повторение событий,
образовавших кольцо, то обратная связь
называется положительной. Если же
характер влияния последующего события
на предшествующее такой, что
происходит
торможение первоначального процесса,
то обратная связь называется отрицательной.
Примерами процессов с положительной
обратной связью служат горение, цепная
реакция, самовозбуждение усилителей,
акустическая «завязка» в магнитофоне,
когда при включении его на запись от
микрофона забывают выключить
громкоговоритель.
![]()
Рис.
27. Цепь взаимосвязанных событий
(а, Ь, с, d,
е)
и обратная связь (от события
d
к
событию Ь).
Процессы
с отрицательной обратной связью не
менее распространены, но они более
скрыты от прямого наблюдения, так как
внешне сходны с множеством самопроизвольно
затухающих процессов, образованных
незамкнутыми последовательностями
событий. Но именно отрицательная
обратная связь оказалась тем замечательным
принципом, которому обязана автоматика
своим прогрессом.
Простейшую
реализацию принципа отрицательной
обратной связи в радиотехнике мы
встречаем в электронных усилителях,
когда некоторая часть выходного
напряжения усиленного сигнала
возвращается на вход усилителя в такой
полярности, что этот сигнал вычитается
из входного (рис. 28).
Пусть
коэффициент усиления усилителя без
обратной связи
1![]()
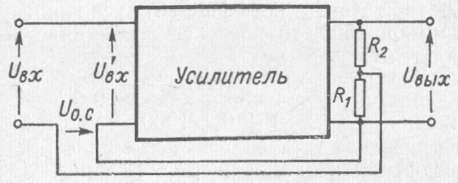
Рис.
28. Усилитель с отрицательной обратной
связью.
С
делителя из сопротивлений Rj
и
R2
по
цепи обратной связи подается часть
выходного напряжения
![]()
(14)
где:
![]()
При
отрицательной обратной связи входное
напряжение собственно усилителя
Их на величину U0.c
меньше
входного на
пряжения
всего устройства
![]()
.
:
![]()
Из
соотношений (13) —(15) легко выводится
выражение коэффициента усиления
всего устройства с обратной связью
![]()
(16)
Из
формулы (16) видно, что отрицательная
обратная связь уменьшает усиление
(К0С
<
К,
так как
![]()
).
Так,
если до
введения
обратной связи коэффициент усиления
усилителя составлял, например, 1000,
то после ее введения с коэффициентом
(![]()
=
0,1 он упадет до
![]()
т.
е. уменьшится практически в (![]()
== 100 раз. Однако вместе с этим резко
повысится его стабильность. Действительно,
увеличение значения К вдвое (до 2000)
приводит к увеличению значения
Ко.с
всего лишь на 0,5% (до 9,95); при уменьшении
К вдвое
(до 500) величина
Ко.с
уменьшается на 1% (до 9,8).
Этим
действие отрицательной обратной связи
не ограничивается. Если в результате
наводок на внутренние цепи усилителя
или пульсации питающего напряжения на
усиливаемый сигнал накладываются
помехи, то относительный уровень этих
помех также уменьшается в
раз. Аналогично влияет обратная связь
на величину искажений, вносимых
усилителем.
Таким
образом, применение отрицательной
обратной связи позволяет существенно
ослабить влияние всевозможных
возмущающих воздействий.
Обращаясь
к языку структурных схем, рассмотренное
устройство можно представить с
помощью схемы, показанной на рис. 29,
а.
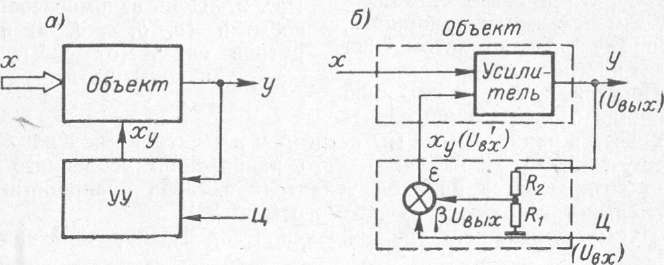
Рис.
29. Схемы простейшего устройства с
обратной связью
Здесь
динамической системой, или объектом,
является усилитель. В роли входа х
выступают возмущающие воздействия,
а в роли выхода
у
— полезный усиленный сигнал. Управляющее
устройство представляет собой схему,
воспринимающую подлежащий усилению
полезный сигнал
Ц
(цель, которой должен достичь выход,
или задающее воздействие) и сравнивающую
с ним выходной сигнал. Управляющим
воздействием
ху
служит разность между задающим
воздействием и сигналом обратной связи.
Рис.
29, б показывает, как в эту схему вписывается
усилитель с обратной связью,
изображенный на рис. 28. Здесь перекрещенным
кружком обозначен элемент, осуществляющий
вычитание одной величины из другой и
называемый в автоматике сравнивающим
устройством. Выход
![]()
такого элемента называется сигналом
ошибки. В данном случае
![]()
и ![]()
,
т.
е. воспроизводится уравнение (15). В
отличие от описанных выше разомкнутых
автоматических систем в данной системе
стабилизация коэффициента усиления
— малые отклонения выходного сигнала
от задающего воздействия — достигается
без непосредственного контроля
возмущающих воздействий и без
использования в конструкции
управляющего устройства каких-либо
сведений о путях влияния этих воздействий
на выход объекта. Поэтому управляющее
устройство проектируется очень просто,
а эффект производит универсальный:
ослабляются даже такие возмущающие
воздействия, которые конструктор и не
принимал во внимание. Это достигается
благодаря обратной связи, которая
позволяет сравнивать в управляющем
устройстве истинный выход с задающим
воздействием и использовать отклонение
выхода, чем бы оно ни вызывалось, в
качестве управляющего воздействия.
Вместе с этим отпадает требование
высокой точности реализации расчетных
характеристик объекта и высокой их
стабильности. Эффективная работа
рассмотренной схемы достигается
при условии, что стабилен лишь коэффициент
деления напряжения сопротивлениями
![]()
и
R2.
Одной
из центральных проблем автоматических
систем с обратной связью, или, как
их иначе называют, замкнутых систем,
или систем регулирования по отклонению,
является обеспечение устойчивости.
Дело в том, что в любой цепочке
взаимосвязанных событий каждое
следующее событие происходит с некоторой
задержкой после свершения вызвавшего
его предыдущего события. В результате
этого сигнал обратной связи всегда
приходит с некоторой задержкой
относительно момента, в который начался
процесс, породивший этот сигнал. Иначе
говоря, существует разность фаз
первичного сигнала и сигнала обратной
связи, поступающих на элемент сравнения.
Для того чтобы обратная связь была
отрицательной и сохраняли силу формулы
(13) — (16), необходима обратная полярность
сигнала обратной связи и допустима
лишь незначительная задержка его фазы.
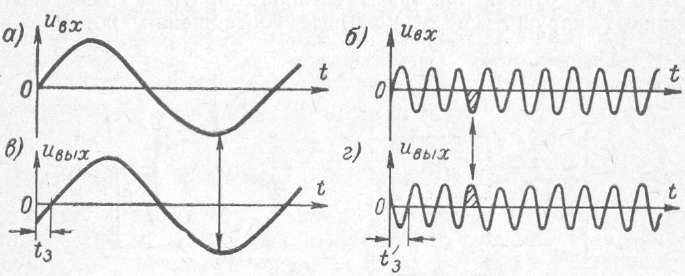
Рис.
30. Изменение характера обратной связи
с изменением частоты сигнала в
инерционной системе с одинаковым
временем задержки для сигналов
разных частот:
а, б
— входные сигналы различных частот;
в, г,
— выходные сигналы тех же частот.
По
мере отклонения фазы сигнала обратной
связи сначала начинают нарушаться те
полезные соотношения, которые при дают
системе устойчивость против возмущений,
и эффективность обратной связи снижается.
Потом эти полезные качества теряются
совсем, а при еще больших отклонениях
по фазе обратная связь становится
положительной и легко приводит к
самовозбуждению системы. Происходит
это по следующей причине.
Задержку
сигнала, проходящего через усилитель,
создают цепи, содержащие реактивные
сопротивления (конденсаторы, катушки
самоиндукции, трансформаторы) и неизбежно
присутствующие паразитные емкости
и индуктивности. При этом колебания с
различными периодами повторения
получают разный сдвиг фазы (рис. 30). В
то время как на одних частотах условия
соответствуют отрицательной обратной
связи, на других частотах она может
стать положительной (выполняется
«баланс фаз»). Самовозбуждение возникает
в случае, когда на частоте баланса фаз
сигнал обратной связи по величине не
меньше первичного сигнала (выполняется
«баланс амплитуд»). Для этого достаточно,
чтобы на частоте баланса фаз произведение
превышало единицу. Таким образом,
допустимая глубина обратной связи
ограничена. Правда, баланс фаз возникает
на частотах, далеких от рабочей полосы
частот усилителя, где коэффициент
усиления К
уже значительно снижается, но в конце
концов именно опасность самовозбуждения
устройств с обратной связью ставит
предел допустимой глубине отрицательной
обратной связи, а вместе с тем и достижимой
точности таких систем.
Увеличить
в известных пределах глубину обратной
связи позволяет введение в управляющее
устройство специальных цепей фазовой
коррекции, которые благодаря
соответствующему их расчету не влияют
на коэффициент передачи в пределах
рабочей полосы частот, но изменяют
характеристики системы за пределами
этой полосы таким образом, что ни на
какой частоте не выполняются одновременно
условия баланса фаз и амплитуд.
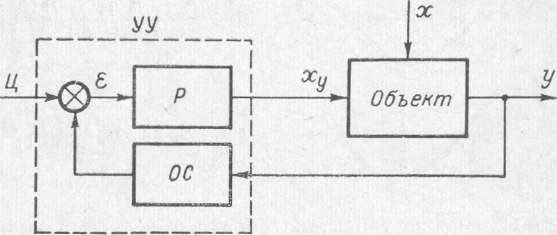
Рис.
31. Схема замкнутой автоматической
системы с регулятором
Р
(ОС
— цепь обратной связи).
Корректирующие
цепи (Р
на рис. 31) представляют собой комбинацию
линейных динамических звеньев (своего
рода частотных фильтров) и включаются
в цепь управляющего воздействия
![]()
,
так что последнее уже не совпадает с
сигналом ошибки
![]()
,
как в простейшем устройстве (сравните
с рис. 29, б).
Узел
управляющего устройства, вырабатывающий
управляющее воздействие
![]()
по
сигналу ошибки
,
часто называется регулятором. В
данном случае регулятором могут быть
упомянутые корректирующие цепи.
Лекция
Замкнутые
системы автоматического управления
Задачу,
аналогичную усилению электрических
сигналов, выполняют многие устройства,
предназначенные для телеуправления
или для усиления физической силы
оператора, управляющего перемещением
каких-либо частей механизмов. В обоих
случаях задача автоматической системы
состоит в воспроизведении выходной
величиной тех значений, которые задаются
входным сигналом. Иначе говоря, выходная
величина должна все время как бы следить
за значением входной переменной; отсюда
название таких устройств -— следящие
системы.
В
качестве примера следящей системы
рассмотрим устройство дистанционного
управления настройкой радиовещательного
приемника. Упрощенная схема такого
устройства, примененного в приемнике
«Фестиваль», приведена на рис. 32. Слева
показан пульт дистанционного управления
(ПДУ),
включающий в себя реохорд (потенциометр)
![]()
с механизмом ручного привода и шкалой
настройки, справа изображены относящиеся
к данной системе узлы, размещенные
в приемнике: блок конденсаторов настройки
С, вал которого механически связан с
реохордом R2
и
исполнительным реверсивным электродвигателем
РД,
усилитель сигнал ошибки У и питающий
схему трансформатор
Тр.
На
оба реохорда,
и
![]()
,
поступает
одно и то же переменное напряжение
от вторичной обмотки трансформатора
Тр. С
движка реохорда
снимается
напряжение, соответствующее желаемой
настройке приемника, а с движка реохорда
R2
—
напряжение, соответствующее истинной
его настройке. Если истинная настройка
совпадает с желаемой, то оба напряжения
одинаковы и их разность, действующая
между движками реохордов, равна нулю.
При несовпадении истинной настройки с
желаемой между движками появляется
напряжение ошибки
![]()
,
(сигнал рассогласования). В зависимости
от того, правее или левее нужной точки
находится движок на реохорде R2,
фаза
напряжения
либо
совпадает с фазой питающего реохорды
напряжений, либо противоположна ей.
Этот сигнал усиливается усилителем
переменного тока
У
и подается на одну из обмоток
электродвигателя
РД.
На другую его обмотку через фазо-сдвигающий
конденсатор Сф подается такое же
напряжение, что и на реохорды. При этом
фаза напряжения ошибки определяет
направление вращения двигателя. Обмотки
двигателя включаются так, чтобы при
появлении сигнала рассогласования
направление вращения соответствовало
уменьшению рассогласования.
Это
устройство легко вписывается в структурную
схему (рис. 33), аналогичную схеме усилителя
с отрицательной обратной связью.
Отличительная особенность заключается
в наличии специальных датчиков (реохордов
и
R2)
задаваемого
и истин-
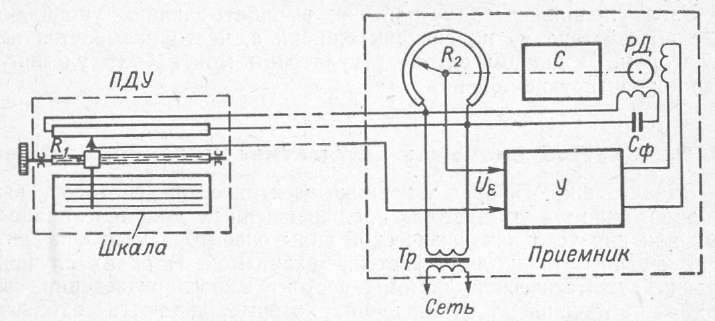
Рис.
32. Устройство дистанционного управления
настройкой радиоприемника.
ного
значений контролируемой переменной
(угла поворота
![]()
вала конденсаторов настройки), которая
по своей физической природе не является
электрической величиной.
Напряжение
![]()
,
снимаемое с реохоода
R1
служит
электрическим аналогом цели ®3,
а напряжение
![]()
,
снимаемое с реохорда
![]()
,—
электрическим
аналогом
выхода
![]()
.
Эти напряжения сравниваются, и сигнал
рассогласования
![]()
подается
на усилитель У, выполняющий роль
регулятора. Выходной сигнал усилителя
Uy
выступает
в роли управляющего воздействия
ху
и подается на объект — электродвигатель
РД.
К объекту управления следует отнести
и связанный с двигателем механизм
привода блока конденсаторов настройки,
причем выходом
будет служить угол поворота вала
блока конденсатора
переменной емкости.
Легко
обнаружить функциональное соответствие
между следующими переменными в схеме
усилителя с отрицательной обратной
связью и в следящей системе:
в
усилителе
![]()
в
следящей системе . ..
![]()
Соответствующая
замена переменных в формулах (13) —(16)
делает их справедливыми для следящей
системы. При этом коэффициент передачи
без обратной связи (13) определяется
отношением выхода к сигналу ошибки:
![]()
(17)
а
коэффициент обратной связи
![]()
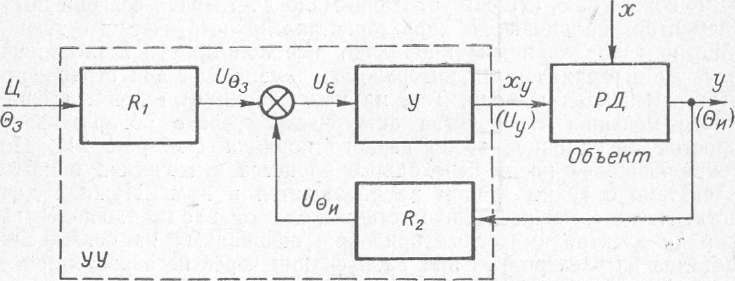
Рис.33.
Схема следящей системы.
Таким
образом, характеризующее глубину
обратной связи произведение
![]()
Из
формулы (17) следует, что коэффициент
передачи получается размерной
величиной
(град/в).
Это весьма распространенное в
автоматике обобщение понятия о
коэффициенте передачи устройств с
различной физической природой входной
и выходной переменных.
Подобно
искажениям сигнала (в усилителях с
обратной связью) точность отработки
заданного значения выхода в следящей
системе сильно зависит от глубины
обратной связи, т. е. от значения
![]()
.
И по
прежнему
существует предельно допустимое
значение этого произведения, превышение
которого вызывает самовозбуждение
системы. При этом выходная переменная
начинает претерпевать непрекращающиеся
колебания. Известный запас устойчивости
необходим для предотвращения
самовозбуждения при случайных
изменениях параметров системы, влияющих
на коэффициенты и К, а также для получения
достаточно быстрого переходного процесса
(типа 1 или
2
на рис. 22).
Что
же касается статической ошибки, то в
описанной следящей системе мы
встречаемся с особым динамическим
звеном, допускающим ее полное исключение.
Таким звеном служит электродвигатель.
Действительно, ои должен вращаться до
тех пор, пока на него поступает напряжение
от усилителя сигнала рассогласования.
Следовательно, система придет в равновесие
лишь при условии, что выход
точно
равен заданному значению
![]()
.
Автоматические
системы, у которых статическая ошибка
отсутствует, называются астатическими.
Динамическое звено, придающее системе
это свойство, также называется
астатическим. Особенность астатического
звена заключается в том, что его выходная
переменная непрерывно увеличивается,
если к его входу приложено постоянное
воздействие. Так, угол поворота вала
электродвигателя непрерывно возрастает
при его вращении под действием неизменного
напряжения.
К
сожалению, существует очень мало
достаточно совершенных элементов,
обладающих характеристиками астатического
звена. Многие такие элементы проявляют
необходимое свойство лишь в течение
ограниченных интервалов времени или
при ограниченных изменениях выхода.
Так, на протяжении отрезков времени,
много меньших т, свойства астатического
звена обнаруживает простое инерционное
звено первого порядка (см. рис. 21). Но
сохраняющаяся после переходного процесса
статическая ошибка в системе с таким
звеном не обращается в нуль.
Нужная
для астатического звена зависимость
выхода от входа наблюдается у ряда
электрохимических приборов, основанных
на осаждении металла из электролита
при пропускании через него постоянного
тока. Таким путем удается изменять
электрическое сопротивление под
действием неизменного тока. Однако
возможные пределы изменения
сопротивления, выступающего в роли
выходной переменной, у этих приборов
ограничены. Эти и другие недостатки
устройств, имитирующих астатическое
звено, ограничивают возможности
создания астатических систем с
действительно нулевой статической
ошибкой.
Принцип
обратной связи находит применение не
только в следящих системах, но и в
системах автоматического регулирования,
предназначенных для стабилизации
фиксированного значения выходной
переменной. При этом структура замкнутых
САР совпадает со структурой следящих
систем или усилителей с обратной
связью (рис. 31), если под входом
Ц
понимать заданное постоянное значение
выхода. Так, схеме па рис. 31 соответствует
структурный принцип построения
электронных и полупроводниковых
стабилизаторов напряжения. Принципиальная
схема полупроводникового стабилизатора
показана на рис. 34.
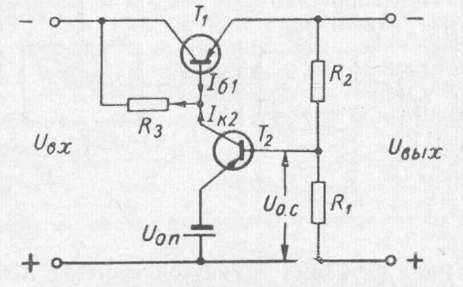
Рис.
34. Принципиальная схема полупроводникового
стабилизатора напряжения.
На
вход стабилизатора подается
нестабилизированное напряжение
![]()
от выпрямителя.
Выходное
напряжение
![]()
меньше
входного на величину падения напряжения
между выводами коллектор — эмиттер
транзистора
![]()
.
В
состав стабилизатора вводится
маломощный источник стабильного
напряжения, называемого опорным
напряжением UОП—
На рис. 34 в качестве такого источника
показан гальванический элемент. Величина
UОП
обычно
значительно меньше необходимого
выходного напряжения UВЫХ.
Выходное напряжение с помощью делителя
напряжения на резисторах
и
делится
до величины
![]()
.
Тогда к промежутку база — эмиттер
транзистора
Т2
приложено напряжение ошибки
![]()
.
Чем
больше величина
,
тем больше ток коллектора
![]()
транзистора
Т2.
Этот ток вычитается из тока базы
![]()
транзистора
Т1
поступающего от источника входного
напряжения через сопротивление
![]()
.
С уменьшением тока базы транзистора
![]()
его сопротивление между выводами
коллектор — эмиттер возрастает, и это
приводит к уменьшению напряжения на
выходе стабилизатора. Таким образом,
ошибка уменьшается.
В
отличие от стабилизаторов со структурой
разомкнутой САР этот стабилизатор
уменьшает изменения выходного напряжения,
вызванные не только отклонениями
входного напряжения, но и изменениями
тока нагрузки, а также нестабильностью
параметров регулирующего элемента
— транзистора
T1.
Для
этого стабилизатора остаются в силе и
соотношения (13) — (16), если в качестве
UBХ
принять
опорное напряжение
,
напряжение
U‘BX
заменить
напряжением
,
а коэффициент усиления
К
приравнять усилению от входа транзистора
Т2
до выходных зажимов стабилизатора.
Величины UBЫХ
и
![]()
сохраняют
прежний смысл.
В
обоих случаях, когда ошибка стремится
к нулю, получаем
![]()
Это
уравнение, как и формулы (13) — (16),
устанавливает линейные соотношения
между сигналами, действующими в различных
цепях системы, а потому и вся система
должна быть линейной. Теория таких
систем полностью разработана и позволяет
производить точный математический
расчет соответствующих устройств.
Но
часто возникают более сложные задачи,
когда решающая их система в принципе
не может быть линейной. Распространенное
устройство такого рода — замкнутая
система АРУ.
Как
и в усилителе с обратной связью, здесь
входным воздействием служит подлежащий
усилению сигнал, а выходным — усиленный
сигнал. Но теперь требуется не постоянство
коэффициента усиления, а такое
автоматическое изменение его, при
котором выходной сигнал будет сохранять
одинаковый уровень при изменениях
уровня входного сигнала в широких
пределах. Естественно, что управляющее
устройство в этом случае должно
располагать информацией не о самих
входных и выходных сигналах, а об их
уровнях (интенсивностях), и для получения
такой информации нужны датчики этих
уровней. Используя принцип обратной
связи, достаточно ограничиться контролем
уровня выходного сигнала и сравнивать
его с заданным значением. Получающийся
сигнал ошибки используется далее для
управления коэффициентом усиления
регулируемого усилителя. Соответствующая
структурная схема приведена на рис. 35.
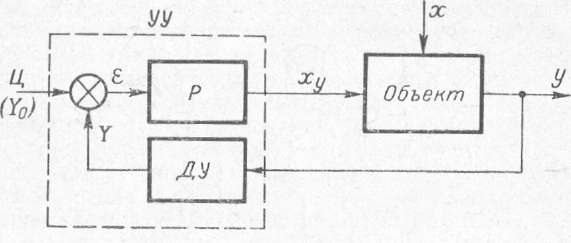
Рис.
35. Схема замкнутой системы АРУ.
Несмотря
на внешнее сходство этой схемы с рис.
31, действие входящих в нее устройств
резко отличается. Если раньше задающим
воздействием
Ц
служил подлежащий усилению сигнал, то
теперь им является постоянное
напряжение,соответствующее желаемому
уровню У0
выходного сигнала («напряжение
задержки»), а усиливаемый сигнал выступает
в роли возмущающего воздействия
х,
вызывающего изменения уровня выхода.
Узел
ДУ,
введенный в цепь обратной связи, является
датчиком уровня выходного сигнала
и принципиально должен быть нелинейным
устройством. В качестве этого датчика
может работать устройство, аналогичное
датчику уровня входного сигнала в схеме
АРУ «вперед» (рис. 20), который состоит
из детектора и сглаживающего фильтра.
Наконец, ошибка
![]()
теперь представляет собой не разность
входного и выходного сигналов усилителя,
а отклонение уровня выходного сигнала
от заданного уровня (![]()
),
а управляющее воздействие — специальный
сигнал, формируемый регулятором Р под
действием чотклонения
с целью изменения коэффициента усиления
К усилителя.
Работу
такой системы можно описать соотношениями:
![]()
которые
позволяют записать уравнение всей
системы в виде
![]()
Здесь
символы
![]()
и
![]()
обозначают функциональные преобразования,
осуществляемые соответственно датчиком
уровня, регулятором и элементом усилителя,
изменяющим коэффициент усиления в
зависимости от управляющего воздействия.
Все эти функции в общем случае нелинейные.
Нелинейной является и операция
перемножения двух переменных
Кх.
Расчет такой системы
—
достаточно сложная задача, решаемая в
инженерной практике приближенно.
Другая
особенность нелинейных систем, часто
доставляющая большие неудобства,
заключается в том, что у таких систем
глубина обратной связи изменяется в
зависимости от уровня задающих или
возмущающих воздействий. Так, в замкнутой
системе АРУ от величины входного сигнала
зависит коэффициент его усиления К, а
следовательно, и приращение выхода при
одинаковых приращениях воздействия
от разных исходных уровней. Это приводит
к зависимости формы переходного процесса
от величины возмущающего воздействия.
Апериодический переходной процесс при
малых возмущениях (типа 1 на рис. 2) может
смениться сильно колебательным при
больших (типа 3), а при чрезмерно сильных
возмущениях система может потерять
устойчивость и самовозбудиться.