Первичная ошибка
Cтраница 1
Первичные ошибки можно разделить на скалярные и векторные. Первичные ошибки могут быть также классифицированы по закономерности их появления на систематические, случайные, грубые. Систематическими называют ошибки постоянные по величине во всех экземплярах механизмов или изменяющиеся по определенному закону.
[1]
Первичные ошибки, определенные в линейной теории точности, рассматриваются в данный момент в виде случайных величин или случайных функций. Зная законы распределения первичных ошибок и пользуясь аппаратом нелинейной теории точности, можно еще в стадии проектирования механизмов установить их влияние на точность работы механизмов в процессе эксплуатации и подобрать оптимальные соотношения параметров и звеньев для достижения заданной точности.
[2]
Первичные ошибки могут быть скалярными и векторными, плоскими и пространственными. Плоская векторная ошибка может быть заменена двумя скалярными, пространственная — тремя скалярными.
[3]
Первичные ошибки могут быть скалярными или векторными, плоскими и пространственными. Плоская векторная ошибка может быть заменена двумя скалярными, пространственная — тремя скалярными.
[4]
Первичные ошибки, вызванные неточностью изготовления деталей, называются технологическими ошибками, а ошибки, козникшие в процессе работы механизма из-за износа, тепловых и силовых деформаций, — эксплуатационными.
[5]
Первичные ошибки — на той стадии, когда происходит первичное преобразование контролируемой категории в фиксированную запись в некотором документе или при формировании кодограммы. Первичное преобразование в настоящее время в большинстве случаев производится вручную.
[6]
Первичные ошибки могут быть скалярными или векторными, плоскими и пространственными. Плоская векторная ошибка может быть заменена двумя скалярными, пространственная — тремя скалярными.
[7]
Первичные ошибки от зазоров обозначаются значком /, который ставится у знаков суммирования ошибок.
[8]
Систематические первичные ошибки ( деформации деталей) вычисляются по исходным формулам этих ошибок.
[9]
Обычно первичные ошибки отсчитывают не от произвольно выбранных осей, а от координатных, связанных с элементами кинематических пар.
[10]
Рассмотренные первичные ошибки по-разному влияют на суммарную ошибку как по самой своей природе, так и вследствие положения их в различных участках цепи механизма. Необходимо установить связь между величиной первичной ошибки и величиной соответствующей составляющей в суммарной ошибке механизма.
[11]
Первичные ошибки сложного механизма складываются из первичных ошибок составляющих элементарных механизмов. Для определения коэффициентов влияния этих ошибок требуются некоторые простейшие преобразования.
[12]
Рассмотрим первичные ошибки, вызванные погрешностями производства.
[13]
Все первичные ошибки разделяются также на систематические и случайные. Случайные ошибки возникают при изготовлении в зависимости от ряда факторов и проявляются в рассеянии размеров однотипных деталей. Значение каждой из случайных ошибок невозможно заранее предвидеть.
[14]
Поскольку отдельные первичные ошибки в партии механизмов являются случайными функциями, то и ошибка положения, характеризующая собой показатель точности партии механизмов, также должна быть представлена в виде случайной функции.
[15]
Страницы:
1
2
3
4
1
Первый слайд презентации
ТЕМА №4
Корректность ПС
МиКПО

Изображение слайда
2
Слайд 2: Рассматриваемые вопросы
Основные понятия и виды корректности программ.
Типы эталонов и методы измерений и проверки корректности программ.
Ошибки в ПС (количественное описание ошибок, классификационная схема программных ошибок, источники ошибок).
Управление технологической безопасностью ПС и данных
МиКПО

Изображение слайда
Корректность комплексов программ
Корректность
текстов
программ
Синтаксическая
Корректность
программных
модулей
Корректность
данных
Корректность
групп и комплексов
программ
Семантическая
Структурная
Функциональная
Структурная
Конкретных
значений
Структурная и
межмодульных
связей
Функциональная
Детерминированная
Стохастическая
Детерминированная
Динамическая
Стохастическая
МиКПО

Изображение слайда
КОНСТРУКТИВНАЯ
Заключается в соответствии их структуры общим правилам структурного программирования и конкретным правилам оформления и внутреннего построения программных модулей.
данных
модулей
ФУНКЦИОНАЛЬНАЯ
Определяется корректностью обработки исходных данных и получения результатов.
КОНСТРУКТИВНАЯ
Определяется правилами их структурирования и упорядочения.
ФУНКЦИОНАЛЬНАЯ
Связана, в основном, с конкретизацией их содержания в процессе исполнения программ, а также при подготовке данных внешними абонентами.
МиКПО

Изображение слайда
5
Слайд 5: Корректность групп программ
КОНСТРУКТИВНАЯ
Определяется правилами структурного, модульного построения программных комплексов и общими правилами организации межмодульных связей. Эта составляющая может быть проверена формализованными автоматизированными методами.
ФУНКЦИОНАЛЬНАЯ
Можно разделить на:
детерминированную корректность – обеспечивается тогда, когда между исходными и результирующими данными используемых программ и определенными эталонными значениями устанавливается однозначное соответствие
стохастическую корректность – результирующие и исходные данные соответствуют распределениям случайных величин
динамическую корректность – соответствие изменяющихся во времени результатов исполнения программ эталонным данным
МиКПО

Изображение слайда
6
Слайд 6: Схема взаимодействия компонент, определяющих обнаруживаемые отклонения программ от эталонов
Модель области
определения исходных данных
Эталоны:
формализованные правила;
программные спецификации;
тесты
Проверяемые программы:
исходные тесты;
результаты исполнения
Средства сравнения программ
и их результатов с эталонами
Отклонение от эталонов
МиКПО

Изображение слайда
Методы получения
эталонных значений
ручные или на ЭВМ расчеты
по аналитическим формулам
использование результатов
функционирования ранее
разработанных реальных комплексов
программ или их компонент
разработка упрощенных
или обобщенных математических
моделей проверяемых программ
разработка правдоподобных
гипотез и постановка
умозрительных экспериментов
МиКПО

Изображение слайда
8
Слайд 8: Верификация программ и инварианты
Верификация (подтверждение правильности) программ состоит в проверке и доказательстве корректности разработанной программы по отношению к совокупности формальных утверждений, представленных в программной спецификации и полностью определяющих связи между входными и выходными данными этой программы, при этом отношения между переменными на входе и на выходе программы анализируется не в виде конкретных значений (или распределений, как при тестировании), а в виде описания их свойств, проявляющихся при любых процессах обработки этих переменных в контролируемой программе (т.е. проверка на более высоком уровне).
Инварианты – представляют собой условия, не зависящие от входных спецификаций программы и отражающие фактические отношения между переменными программы.
МиКПО

Изображение слайда
9
Слайд 9: Блок-схема системы верификации программных модулей
Разработчик
программы
Текст программы
на языке
Автоматическая генерация
инвариантов верификации
Контроль исходных данных
и дополнение условий верификации
Группирование условий верификации
по этапам доказательства корректности
Доказательство корректности
компонент программы
Доказательство корректности взаимодействия
компонент и программы в целом
Спецификации на
программный модуль
Синтаксический контроль
корректности спецификаций
МиКПО

Изображение слайда
10
Слайд 10: Понятие ошибки
В широком смысле слова под ошибкой понимают неправильность, погрешность или неумышленное, невольное искажение объекта или процесса. При этом подразумевается, что известно правильное или неискаженное состояние объекта, к которому относится ошибка.
Считается, что в программе имеется ошибка, если она не выполняет того, что пользователю разумно от нее ожидать. В результате наличие ошибки становится функцией, как самого программного комплекса, так и неформализованных ожиданий его пользователей.
МиКПО

Изображение слайда
11
Слайд 11: Первичные и вторичные ошибки (часть 1)
Первичные ошибки – это искажения в тексте программ, подлежащие корректировке. Однако непосредственно обнаруживается ошибка по ее вторичным проявлениям, путем сравнения результатов функционирования программы с одним из перечисленных выше типов эталонов. Искажение выходных результатов исполнения программы, или вторичная ошибка, вызывает необходимость выполнения ряда операций по локализации и устранению первичной ошибки.
В первом приближении величину вторичной ошибки в j -х результатах решения задачи за счет пропущенных при отладке первичных ошибок можно оценить статистически следующим образом:
Если принять, что при длительности отладки величина есть вероятность наличия в программе первичной ошибки k -го типа, которая при исполнении программы вносит в результирующую j -ю переменную дополнительную ошибку, то значение вторичной ошибки у j -й переменной можно представить выражением
,
где m – полное количество типов, не выявленных в программе, первичных ошибок.
МиКПО

Изображение слайда
12
Слайд 12: Первичные и вторичные ошибки (часть 2)
Формальная оценка значений и затруднительна, в лучшем случае их можно оценить методами экспертного опроса при условии четкой предварительной классификации m типов первичных ошибок в программах (индекс k ) и q выходных величин (индекс j ). Тогда можно получить общую средневзвешенную ошибку функционирования системы вследствие не выявленных первичных ошибок:
Потеря эффективности программ за счет неполной отлаженности в первом приближении можно считать прямо пропорциональным (с коэффициентом ) среднеквадратическим вторичным ошибкам в выходных результатах:
МиКПО

Изображение слайда
13
Слайд 13: Первичные и вторичные ошибки (итог)
Таким образом, оценка вторичных ошибок функционирования программ может в принципе производиться по значениям потерь вследствие не устраненных первичных ошибок в программе. Вторичные ошибки являются определяющими для эффективности функционирования программ, и не каждая первичная ошибка вносит заметный вклад в выходные результаты. Вследствие этого ряд первичных ошибок может оставаться необнаруженным и, по существу, не влияет на функциональные характеристики программы.
МиКПО

Изображение слайда
14
Слайд 14: Классификационная схема ошибок

Изображение слайда
ОБЕСПЕЧЕНИЕ ТЕХНОЛОГИЧЕСКОЙ БЕЗОПАСНОСТИ
ПС И БД
МиКПО

Изображение слайда
16
Слайд 16: Основные понятия
Безопасность данных – защита данных от случайного или преднамеренного разрушения, раскрытия или модификации.
Секретность – право лица решать, какую информацию он желает разделить с другими, а какую скрыть.
Конфиденциальность – понятие, которое употребляется по отношению к данным; это статус, предоставленный данным и согласованный между лицом или организацией, предоставляющей данные, и организацией, получающей данные. Конфиденциальность определяет требуемую степень защиты данных.
Целостность – имеет место тогда, когда данные в системе не отличаются от данных в исходных документах, т.е. не произошло случайного или преднамеренного изменения данных, их уничтожения.
МиКПО

Изображение слайда
17
Слайд 17: Цели обеспечения безопасности использования программ и данных
Сохранение целостности, полноты и достоверности информации и программ обработки данных, установленных собственником или уполномоченным им лицом.
Предотвращение утечки, хищения, утраты, несанкционированного уничтожения, искажения модификации (подделки), блокирования, копирования и других непредусмотренных негативных воздействий на ПС и данные, информационную систему.
Обеспечение конституционных прав граждан на сохранение личной тайны и конфиденциальности персональной информации, накапливаемой в БД.
Сохранение секретности, конфиденциальности информации в соответствии с действующим законодательством.
Соблюдение прав авторов программной и информационной продукции, используемых в информационной системе.
МиКПО

Изображение слайда
18
Слайд 18: Модель анализа безопасности информационной системы при отсутствии злоумышленных угроз
Объекты уязвимости
вычислительный процесс
информация БД
объектный код программ
информация для потребителей
Дестабилизирующие факторы и угрозы безопасности
Внутренние:
ошибки проектирования при постановке задач
ошибки алгоритмизации задач
ошибки программирования
недостаточное качество средств защиты
Внешние:
ошибки персонала при эксплуатации
искажения информации в каналах
сбои и отказы аппаратуры ЭВМ
изменения конфигурации системы
Меры предотвращения угроз безопасности
предотвращение ошибок в CASE -технологиях
систематическое тестирование
обязательная сертификация
Оперативные методы повышения безопасности
временная избыточность
информационная избыточность
программная избыточность
Последствия нарушения безопасности
разрушение вычислительного процесса
разрушение информации БД
разрушение текста программ
разрушение информации для потребителей
Модель анализа безопасности информационной системы при отсутствии злоумышленных угроз
МиКПО

Изображение слайда
19
Слайд 19: Оперативные методы повышения безопасности
Временная избыточность состоит в использовании некоторой части производительности ЭВМ для контроля исполнения программ и восстановления вычислительного процесса.
Информационная избыточность состоит в дублировании накопленных, исходных и промежуточных данных, обрабатываемых программой.
Программная избыточность для контроля обеспечения достоверности наиболее важных решений по обмену и обработки информации.
МиКПО

Изображение слайда
20
Последний слайд презентации: ТЕМА №4
Корректность ПС
МиКПО
КОНЕЦ ТЕМЫ №4
МиКПО

Изображение слайда
установить линейную зависимость между искомыми величинами. В случае обнаружения дефектов подвергают исследованию группы одинаковых приборов (механизмов).
После определения ряда одинаковых параметров, для которых характерны общие по роду отклонения (для этого каждая единица прибора (механизма) исследуется многократно; в одних и тех же точках, где наблюдались отклонения, определяются средние значения параметров для каждой единицы) находят среднее значение для всей исследуемой партии.
После обработки полученных данных удается определить функцию от ошибки схемы прибора (механизма). Достоинством этого метода является следующее: функцию от ошибок схемы находят, например, методом наименьших квадратов, что значит уменьшение влияния ошибок каждого механизма на общую ошибку для всей группы. Если построить кривую для рядов найденных ошибок, то она будет отражать не только искомые ошибки схемы, но и систематические, которые были допущены при изготовлении или сборке приборов.
Первичной ошибкой является неточность геометрической формы рабочих поверхностей узлов (звеньев). Подобными ошибками могут считаться отклонения разного рода: геометрические параметры, связанные с формой и поверхностью узлов, а также с их взаимным расположением.
Кинематическая пара или звено механизма – это два или более элементов механизма, например, ведущий и ведомый узлы. Для их согласованной работы выбираются конкретные параметры, число которых известно из чертежа. При изготовлении узла каждый из этих параметров может получиться несоответствующим данным чертежа, поэтому число первичных ошибок целесообразно взять равным количеству параметров. Учитываются только рабочие, т. е. взаимодействующие поверхности узлов.
Число скалярных первичных ошибок должно быть столько, сколько количество координат.
Рассмотрим примеры.
1.Элемент кинематической пары, оформлен как точка. В системе координат XYZ положение точки характеризуется тремя координатами, по каждой из которых может быть допущено отклонение. Следовательно, число первичных ошибок три уже в скалярной форме.
2.Элемент кинематической пары имеет форму линии, это значит, что число координат в системе XYZ четыре. Число первичных ошибок четыре.
3.Элемент кинематической пары имеет форму плоскости: в этом случае число первичных ошибок не растет и равно трем.
19б В этом случае в числе параметров могут быть и направляющие углы, но общее число первичных ошибок остается неизменным.
Если плоскостей несколько, то число первичных ошибок будет кратно трем: 3n, где n – количество плоскостей.
4.В случае, когда элемент кинематической пары имеет форму сферы, отклонения могут иметь радиус сферы по трем координатам в декартовой (XYZ) системе координат плюс радиус сферы по длине. Число первичных ошибок равно четырем, т. е. равно количеству параметров с возможными отклонениями.
5.Число первичных ошибок может дойти до 11, например элемент кинематической пары, состоящий из цилиндра и двух плоскостей. Поскольку для цилиндра (кругового) число первичных ошибок равно пяти.
6.Если цилиндр не круговой, то число первичных ошибок – шесть.
7.Если взять круговой конус, то число первичных ошибок – семь, для некругового – восемь. В случае усеченного кругового конуса также восемь.
Числа первичных ошибок элемента кинематической пары, суммируясь для каждого звена, в итоге составляют суммарное число первичных ошибок для всего механизма.
20.Исследование точности механизмов
Впроцессе исследования механизмов анализируются: причины возникновения ошибок, предполагаемые (ожидаемые) величины этих ошибок, методы контроля ошибок и поверки приборов. Все эти вопросы принадлежат метрологии, как неотъемлемой части производства
иэксплуатации изделий в «Приборостроении».
Метрология. Основные понятия.
1.Действующая ошибка кинематической пары – так называют результирующая ошибка
вформах, размерах элемента кинематической пары, которая проявляется непосредственно в процессе работы, ее невозможно фиксировать как постоянную величину, поскольку механизм работает непрерывно. Например, соприкасающиеся поверхности узлов заменяются другими, имеющими свои возможные отклонения от заданных, перемещение ведущего звена f(ц) является аргументом для функций закона распределения ошибок.
ΔF = f(φ).
2.Линия действия – так называют линию, которая является общей нормалью к соприкасающимся рабочим поверхностям, нормаль проходит через точку касания поверхностей. Из-за отклонения параметров у элемента кинематической пары практическая линия действия отличается от теоретической (заданной), что является нередким явлением.
Взаимодействуя друг с другом в процессе эксплуатации, отдельные ошибки порождают комплексную ошибку, которая не подчиняется закону простого суммирования. Первичные ошибки рассматривают как частные случаи комплексной: при анализе комплексной (функциональной) ошибки ее раскладывают в ряд, состоящий из первичных ошибок. Этот метод помогает увидеть ошибки, допущенные в самом технологическом процессе, в разных его стадиях.
Производимые расчеты исходят от функциональной (т. е. практически существующей) ошибки узлов.
Методы анализа ошибок:
1) дифференциальный метод;
2) метод преобразованного механизма;
3) геометрический метод;
4) метод планов малых перемещений;
5) метод относительных ошибок;
6) метод плеча и линии действия.
Первые пять методов служат для анализа первичных ошибок.
Последний метод применяется для исследования функциональных действующих (т. е. комплексных) ошибок, причем является достаточно надежным.
Для перехода от комплексных ошибок к частным и наоборот существует специальная функция, которую называют передаточным отношением ошибок (ее нередко называют еще коэффициентом влияния).
21. Метод плеч и линия действия
Метод плеч и линий действия позволяет выявить все погрешности, приводящие к кинематической неточности прибора.
Погрешности делят на следующие группы:
1.ΔFr – так выделяют те избыточные приращения в общем плече, которые возникают из-за отклонений в подвижных звеньях механизма.
2.ΔFл.д. – так обозначают погрешности, которые возникают из-за ошибок на линии действий или на параллельных ей линиях.
3.ΔFн.э. – приращения (погрешности), являющиеся следствием ошибок у неподвижных звеньев механизма.
Общее приращение ΔFΣ, как нетрудно себе представить, является суммой
вышеперечисленных групп, то есть
FΣ = Fr + Fл.д. + Fн.э. Формула для расчета передачи ошибок:
где ΔF2,ΔF1 – действия соответственно ведомого и ведущего звеньев, i– линейное передаточное отношение между узлами,
r2 , r1 – соответственно, радиусы точек, находящихся на рассматриваемых узлах. Не всегда совпадают линии движения ведомого звена и действия: они могут образовать некоторый угол б. В таком случае приращение на линии движения
где ΔFΣ – общее избыточное приращение по линии действия;
– антипроекция AF на линии действия.
Ошибка для линейного углового положения звена:
где ΔFΣ – общее избыточное давление;
Δφ2, r02– изменение угла между двумя положениями и радиус точки у ведомого звена. Ошибка линейного перемещения
ΔSnep = ΔSk – ΔSH . Для скорости:
22. Расчет точности механизмов. Обеспечение заданной точности
Цель вопроса – определить методику обеспечения заданной точности в партии из однородных механизмов. В пределах допусков требуется обеспечить заданную точность. Возможен разброс самых различных типов ошибок. Сложность ситуации в том что одни и те же ошибки могут влиять на точность механизма в конкретном случае, но те же ошибки в других случаях могут не сказаться на их точности. Такие ошибки называют случайными, а закон их распределения – случайными функциями.
При определении суммарной точности прибора складывают крайние данные в пределах допуска, суммированию подвергаются все ошибки по правилам теории вероятности. Несмотря на большое множество случайных величин, среди них все же есть такие, которые остаются постоянными при разных положениях или перемещениях механизма.
Поиск и определение характеристик случайной величины (ошибок) подводится к нахождению.
Для определения значений существует много методов, вплоть до табличных.
Краткий алгоритм расчета заданной точности для партии однородных механизмов (приборов):
1)уточняем, каковы ошибки выбранной схемы механизма (прибора);
2)распределяем ошибки по составным частям устройства, определив их как частные

сортируем, отбросив незначительные;
3)для каждой частной (первичной) ошибки нужно определить границы допуска (характеристики 0,δ,α,λ)
4)находим передаточные числа для каждой частной (первичной) ошибки и, если они случайные, определяем статистические характеристики
составляем сводную таблицу: для любого положения достаточно трех-пяти значений in , где n = 1, 2, 5;
5) определив по таблице статистических характеристик ошибки положения механизма для нескольких положений ведущего звена, строим график (если приборы предназначены для абсолютного измерения).
Краткий алгоритм последовательности действий по обеспечению заданной точности:
1)выбираем схему (принципиальную);
2)по схеме определяем номинальные величины, при которых заданная точность содержит погрешность схемы, т. е. погрешности не превышают заданную точность;
3)выясняем место ошибок звеньев у механизма, выбираем число компенсаторов (регуляторов) и их местоположение, устанавливаем системы регулирования при сборке;
4)устанавливаем допуски на размеры звеньев механизма;
5)рассчитываем суммарную ошибку.
Последний пункт является решением уже обратной задачи теории точности.
23.Расчет точности электрических цепей приборов. Методы расчета
Вэлектрических цепях механизмов в основном используют следующие элементы: сопротивления R; емкости С; индуктивности L; взаимные индуктивности М.
Параметры этих элементов не обязательно зависят от токов, которые протекают через них. В таком случае эти элементы называют линейными элементами. Ведущими в этих цепях являются элементы, величина которых может быть регулирована. Систематическая погрешность схемы называется структурной ошибкой, которая является аналогом ошибки схемы.
Разность между практическим и идеальным выходными напряжениями называют ошибкой цепи. Из-за ошибки цепи и выходных параметров возникает погрешность, которую называют ошибкой выходного напряжения.
Если при изменении выходных параметров на постоянную величину между UR и Uт образуется разность, то ее называют ошибкой изменения цепи по напряжению (или по току),
где UR – выходноенапряжение реальной цепи, Uт – выходное напряжение идеальной цепи. Если же (UR – Uт) возникает из-за ошибок цепи и входных параметров, то такую
разность называют ошибкой изменения выходного напряжения.
Ошибку выходного напряжения AU, которая возникла из-за первичных ошибок, можно выразить через изменение параметра
ΔU = E х Тi Δqi, где
Внашем случае погрешность Δqi может возникать из-за первичных ошибок, перечисленных выше.
Для вычисления ΔU требуется знать коэффициент влияния
Соседние файлы в папке книжки
- #
- #
- #
- #
Погрешность позиционирования промышленного робота. Первичные ошибки. Погрешности обобщенных координат
Страницы работы
Содержание работы
13 ПОГРЕШНОСТЬ ПОЗИЦИОНИРОВАНИЯ
ПРОМЫШЛЕННОГО РОБОТА
Движение реального механизма всегда отличается от
движения теоретического (идеального) механизма. Это характерно и для
исполнительных устройств промышленных роботов. При выполнении технологической
операции действительное движение рабочего органа отличается от расчетного. Его
положение, скорость и ускорение в любой точке реализуемой им траектории в общем
случае могут не совпадать с расчетными. Разность между действительным и
расчетным положениями рабочего органа называют погрешностью позиционирования
исполнительного устройства промышленного робота. Погрешность позиционирования
характеризует точность ПР и является одной из основных характеристик ПР.
Основными причинами возникновения погрешности позиционирования являются:
— первичные ошибки;
— ошибки обобщенных координат.
13.1 Первичные ошибки
Первичными ошибками (ПО) называют отклонения линейных размеров звеньев и
формы их продольных осей от заданных значений.
На рис.1,а показана первичная ошибка Δlдлины l
звена, возникающая в
результате отклонения его линейного размера, на рис.1,б — первичная ошибка Δl.
длины lзвена, возникающая в результате отклонения
формы продольной оси от прямой линии.

Рис.1
Первичные ошибки возникают при изготовлении деталей
звеньев (технологические первичные ошибки) и в процессе эксплуатации
исполнительного устройства (температурные, силовые и износные
ПО). В результате наличия этих ошибок фактические размеры
звеньев, определяющие положения рабочего органа в пространстве, отличаются от
идеальных, на основании которых составлены расчетные алгоритмы и действительное
положение рабочего органа отличается от расчетного. Решающую роль в образовании
первичных ошибок играют технологические первичные ошибки. На величину первичных
ошибок имеются специальные стандарты (допуски), ограничивающие их максимальные
значения.
Результат действия каждой первичной ошибки на величину
погрешности позиционирования рабочего органа промышленного робота можно
определить независимо от действия других первичных ошибок. Значение
результирующей погрешности позиционирования вычисляют в соответствии с
принципом суперпозиции.
Первичные ошибки делят на систематические и случайные,
скалярные и векторные.
Систематическими называют ошибки, которые во всех деталях данной
партии остаются постоянными. Причины возникновения систематических ошибок могут
быть обнаружены и устранены.
Случайными называют ошибки, которые во всех деталях данной
партии имеют различные значения. Они возникают при действии многочисленных, не
поддающихся учету причин, связанных с оборудованием, инструментом, качеством
материала, состоянием внешней среды и квалификацией рабочего. Под влиянием этих
факторов происходит рассеивание действительных размеров относительно
номинальных.
Скалярные первичные ошибки относят к параметрам звена, имеющим
определенное номинальное значение (например, ошибка размера звена). В
конкретном экземпляре партии одинаковых механизмов каждая скалярная ошибка
имеет вполне определенное значение, знак и направление. Во всей партии та же
ошибка случайна, так как ее значение изменяется в пределах допуска от одного
экземпляра к другому.
Векторные первичные ошибки относят к нулевым параметрам
механизмов, т.е. к параметрам, номинальные значения которых равны нулю
(например, эксцентриситет). Они характеризуются модулем и направлением и всегда
случайны, так как их направления становятся известными только после образования
механизма.
13.2 Погрешности обобщенных координат
Погрешности обобщенных координат включают в себя ряд
ошибок.
1. Ошибка ввода обобщенной координаты. Для
осуществления движения рабочего органа необходимо от системы управления при
помощи автономных двигателей задать движения нескольким или всем звеньям
исполнительного устройства промышленного робота. Так как система управления и
двигатели работают с погрешностями, то в результате управление осуществляется
неточно и действительные движения звеньев отличаются от расчетных. Разность
между действительным и расчетным значением обобщенной координаты, вызванная
погрешностью работы системы управления и двигателя представляет собой ошибку
ввода обобщенной координаты Δq»j.
Ошибки ввода являются случайными величинами не
зависящими от конфигурации исполнительного устройства ПР и их определяют
независимо для каждого звена. Учет взаимного расположения звеньев необходим
только на этапе суммирования.
2. Существенное влияние на возникновение отклонений
движения рабочего органа от расчетного оказывают погрешности, вызванные
упругими свойствами (податливостью) передаточных механизмов
приводов Δq’j и функциональных
звеньев исполнительного устройства Δφj. Особенно это характерно для разомкнутых
исполнительных устройств большой протяженности и грузоподъемности (рис.2).
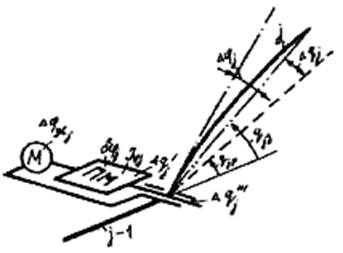
Рис.2
Погрешности исполнительного устройства, обусловленные
его упругими свойствами, не случайны, являются функцией нагрузки, приложенной к
нему, и зависят от его конфигурации.
Похожие материалы
- Расчет показателей надежности и производительности автоматической линии с жесткой транспортной связью
- Основные этапы проектирования роботов и РТС и их содержание. Принципы проектирования промышленных роботов
- Роботы и робототехнические системы. Изучение роботизированного технологического комплекса сборки узлов автоматических систем. Назначение, состав, конструкция
Информация о работе
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание — внизу страницы.
[c.109]
Выше были рассмотрены вопросы точности положения механизма. Однако первичные ошибки являются не только причиной ошибок в положениях, но и в скоростях и ускорениях выходных звеньев и точек.
[c.194]
Классификация первичных ошибок механизма. Первичные ошибки механизма можно распределить на систематические, случайные ц. грубые. Результат классификации будет разный в зависимости от того, классифицируем ли мы первичные ошибки конкретного экземпляра механизма или первичные ошибки целой группы одинаковых механизмов, число которых неопределённо велико, не учитывая индивидуальных особенностей каждого экземпляра. Для практики большое значение имеет второй подход, позволяющий изучать точность в целых классах одинаковых машин.
[c.96]
ЗАВИСИМОСТЬ ОШИБКИ МЕХАНИЗМА от ПЕРВИЧНЫХ ОШИБОК
[c.100]
После замены получается новый механизм, имеющий изменяемость, равную единице, если направление изменения параметра полностью определяется положениями ведущих звеньев заданного механизма. Ошибка Ад в таком случае определяется только одной величиной и есть поэтому скалярная ошибка. Если же направление изменения параметра д не зависит от обобщённых координат ведущих звеньев и может быть любое в некоторой плоскости, то получится двукратно изменяемый механизм, в котором ползун будет перемещаться по любому направлению в плоскости независимо от положений ведущих звеньев. В этом случае первичная ошибка Ад определяется двумя величинами и есть плоская векторная ошибка.
[c.101]
Нахождение ошибок положения и перемещения механизма по первичным ошибкам
[c.463]
В механизме все первичные ошибки могут быть случайными величинами. Тем не менее, ошибка положения для партии подобных механизмов может представлять собой случай-
[c.472]
В общем случае ошибки в реализации циклограммы какого-либо механизма являются следствием ряда его первичных ошибок, под которыми понимаются отклонения расположений в звене элементов кинематических пар от идеальных положений и отклонения существующих поверхностей элементов от заданных геометрических форм. В кулачковых механизмах важнейшими первичными ошибками являются отклонение положения оси вращения коромысла, отклонение длины коромысла, с.мещение оси направляющей при
[c.239]
Ошибки в элементах деталей, сочленяемых с зазором и меняющих свое положение при изменении направления механизма, называются первичными ошибками зазоров. К таким первичным ошибкам относятся ошибки от зазоров в подшипниках и направляющих, ошибки зубчатых зацеплений, ходового винта и гайки и т. п.
[c.164]
Рассматриваются ошибки положения ведомых звеньев, вызванные производственными погрешностями, примеры которых приведены в п. 18. Производственные погрешности, являющиеся первоисточниками ошибок механизмов, называются первичными ошибками механизмов.
[c.226]
Акад. Н. Г. Бруевичем установлено [4], что функциональную связь между первичной ошибкой, имеющей значение А<7,-, и вызванной ею в единичном экземпляре механизма ошибкой положения ведомого звена Аф можно представить выражением
[c.227]
Ошибки положения механизма обусловливаются первичными ошибками, являющимися следствием наличия зазоров в сочленениях звеньев, остаточных деформаций, отклонений в размерах и расположении поверхностей при изготовлении и монтаже деталей и пр.
[c.68]
Ошибки в размерах, а также в форме и расположении геометрических поверхностей звеньев вызывают погрешности взаимного положения и перемещения звеньев при работе механизмов. Эти ошибки называют первичными и делят на систематические, случайные и грубые.
[c.371]
Ошибки Ах, А(7 , А(/ ,. .., д, параметров механизма малы и лежат ь пределах допуска, поэтому дифференциалы этих параметров можно отождествить с первичными ошибками. Уравнение (9.2), выраженное через эти ошибки примет вид
[c.110]
Определим ошибку положения ползуна Ах от первичных ошибок в длинах звеньев Ай1, Аг и А/. Для этой цели рассмотрим три преобразованных механизма, показанных на рис. 9.3. На рис. 9.3, а показан механизм, у которого остановлено вращение кривошипа, а длина звена й может меняться перемещением его в дополнительном ползуне. Сообщая точке А перемещение А по вертикали, отложим в любом масштабе это перемещение из полюса р плана малых перемещений. Из этого же полюса проведем направление, параллельное напра. ляющей ползуна С, т. е. в направлении ошибки Ах , а из конца вектора Ай проведем линию, перпендикулярную звену ВС, по которому направлено малое перемещение точки С от ошибки в угле поворота шатуна ВС. Получим треугольник со сторонами Ай , Ах и /А , который называется планом малых перемещений и строится по правилам построения плана скоростей. Отношение сторон этого треугольника по теореме синусов можно записать в виде
[c.112]
Причинами возникновения ошибок механизма являются теоретические и первичные ошибки.
[c.125]
Частичной ошибкой называется ошибка механизма, вызванная единичной (отдельной) первичной ошибкой.
[c.126]
Коэффициент влияния частичной ошибки выражает соотношение между суммарной и частичной ошибками. Он характеризует степень влияния частичной ошибки на точность механизма и учитывается при расчете допусков на технологические первичные ошибки.
[c.126]
Для каждой первичной ошибки строится преобразованный механизм и план малых перемещений. Из плана находится графически, а затем определяется аналитически передаточное отношение и вычисляется частичная ошибка положения механизма. [c.129]
При преобразовании механизма его ведущее звено закрепляется неподвижно, а звено, имеющее первичную ошибку, преобразуется так, чтобы остальные звенья, имеющие точные размеры, могли получить перемещения, соответствующие величине и направлению рассматриваемой первичной ошибки.
[c.129]
Пример. Найдем ошибку перемещения толкателя кулачкового механизма (рис. 7.4, о), происходящую от первичных ошибок Ал — ошибки положения центра радиуса кривизны профиля кулачка. А/ — ошибки радиусов кривизны профилей кулачка и шаровой поверхности толкателя (t R = A i + A/ j, так как hRi и Д/ 2 перпендикулярны к профилю кулачка в точке С) и Ае — ошибки эксцентриситета. Заменяя в кулачковом механизме высшую пару С звеном АВ и двумя вращательными парами Л и В, оси которых расположены в центрах
[c.129]
На рис. 7.4, 6 приведен преобразованный механизм и план малых переме-ш,ений, показывающий зависимость частичной ошибки положения толкателя Д5г от первичной ошибки Д/-. Передаточное отношение
[c.130]
Суммарная ошибка положения толкателя кулачкового механизма от трех указанных первичных ошибок
[c.130]
Первичные ошибки можно разделить на скалярные и векторные. Если первичная ошибка полностью определяется одной величиной, то ее следует отнести к скалярным (например, ошибки размеров). Векторная ошибка определяется двумя составляющими модулем и направлением (например, ошибки эксцентриситета, перекоса в звене или паре). Первичные ошибки могут быть также классифицированы по закономерности их появления на систематические, случайные, грубые. Систематическими называют ошибки постоянные по величине во всех экземплярах механизмов или изменяющиеся по определенному закону. Их появление можно предсказать. К таким ошибкам относятся, например, ошибки, обусловленные изменением схемы механизма, температурные ошибки и др.
[c.109]
Рассмотрим приложение этого метода на том же примере кривошипно-ползунного механизма. Для определения коэффициента влияния ошибки Аг звена построим (рис. 1.70, а) преобразованный механизм. Ведущее звено 1 закрепим, а по нему, как по направляющей, будем перемещать добавочное звено У с шарниром А в направлении первичной ошибки Аг. Зададимся масштабом первичных
[c.112]
Используем метод для определения погрешности положения ведомого звена кривошипно-ползунного механизма (рис. 1.74, а), содержащего ошибку АЛ. На рис. Л. 74, б построены планы теоретического и действительного механизма, содержащего только первичную ошибку эксцентриситета АЛ (для удобства получения зависимостей планы механизмов наложены друг на друга). Так как размеры других звеньев приняты без ошибок (здесь также используется принцип независимости действия ошибок), то точка В из-за ошибки АЛ должна переместиться в положение В, и положение ведомого, звена определяется координатой А. [c.117]
Отрезок АЗц = 8 — 8 является ошибкой положения ведомого звена. Зависимость между первичной ошибкой АЛ и частной погрешностью механизма А8н найдем из треугольника ВВ В»
[c.117]
Для оценки точности одного механизма необходимо определить его первичные ошибки, связанные с изготовлением и эксплуатацией, затем найти максимальное значение ошибки положения (перемещения) механизма. С этой целью приходится определять погрешности в нескольких положениях механизма. По полученным данным строится график величина погрешности — положение ведущего звена механизма , по которому легко найти погрешность механизма в заданном положении. Погрешность механизма целесообразно представлять в виде суммы частных погрешностей, обусловленных отдельными первичными ошибками. Такие графики дают возможность определить не только максимальную погрешность, но и наглядно показывают удельный вес каждой из частных погрешностей. Последнее особенно важно для установления точности изготовления деталей и способов регулировки механизма.
[c.118]
Если механизм не изготовлен и первичные ошибки нельзя определить непосредственным измерением, то их величину определяют по допускаемым отклонениям на изготовление, указываемым на чертежах деталей. При этом величину первичных ошибок иногда определяют по так называемому методу расчета на максимум — минимум , считая, что ошибки звеньев имеют предельно допустимую величину и при сборке — самые неблагоприятные сочетания. Погрешность механизма, вычисленная по методу максимум — минимум будет заведомо больше действительной.
[c.118]
Точность группы механизмов. В данном случае определяются не значения ошибок в конкретном экземпляре механизма, а практические границы, в которых могут находиться погрешности любого из группы однотипных механизмов, изготовленных по одинаковым техническим условиям. Первичные ошибки в группе механизмов являются случайными независимыми величинами, принимающими любые значения в пределах заданных допускаемых отклонений. Так как в каждом механизме случайные величины первичных ошибок могут сочетаться различным образом, то и погрешности положений отдельных механизмов будут функциями случайных величин, а исследование точности механизмов приобретает теоретико-вероятностный характер.
[c.119]
Главную роль в неточности работы механизмов, занимают первичные ошибки, т. е. погрешности размеров, геометрической формы н взаимного расположения элементов кинематических пар и звеньев механизмов. Первичные ошибки, ызванпые неточностью изготовления деталей, назы1 ак,тся технологическими ошибками, а ошибки, возникшие в процессе работы механизма из-за износа, тепловых и силовых деформаций, — эксплуатационными.
[c.108]
Первичные ошибки можно определять по допускаемым отклонениям, указываемым на чертежах. При этом значение первичных ошибок oпpeдeляI(JT по методу расчета на -максимум — минимум , считая, что при сборке механизма ошибки звеньев имеют самые неблагоприятные сочетания. Результирующая ошибка механизма при этом будет заведомо больше действительной.
[c.114]
Заключение. Приведенный матричный метод заменяет исследование действительного механизма изучением движения соответствующего идеального механизма и определением вторичных ошибок в зависимости от параметров идеального Д1еханизма и от первичных ошибок. Этот метод можно применить и для изучения динамической точности механизмов. Если первичные ошибки не являются систематическими, следовательно, если их разложение случайно, то можно применить уравнения (19) для расчета ожидаемых значений вторичных ошибок и для определения соответствующих дисперсий, так как рассматриваемые уравнения являются линейными по отношению к ошибкам.
[c.195]
Если в партии механизмов все первичные ошибки предстанляют собой случайные величины,то
[c.476]
Выявление н исследование источников ошибок. Здесь выявляют действительные (поэлементные) первичные ошибки — технологические эксплугтацион1 ые (см. Причины и виды ошибок механизмов -). Исследование первичных ошибок заключается в определении их свойств и ппедварительной оценке степени влияния.
[c.445]
А X А д с — — А Xgi -f- А дг зи, где АлСс — ошибка схемы механизма AXgi — ошибка механизма от первичных ошибок параметров qi, Ахизм — ошибка измерения. Это величина случайная, которую можно уменьшить путем многократных измерений.
[c.146]
Если функцию положения механизма х=/(<7 , д-,,. … Я ) невозможно или трудно получить в явном виде, для определения суммарной ошибки Ах можно воспользоваться уравнениями, полученными проецированием векторных контуров механизма на оси координат. Эти уравнения дифференцируют по параметрам механизма и из уравнений произ1ЮДЫых устанавливают связь между суммарной и первичными ошибками.
[c.110]
Для определения точности механизма нужно определить его первичные ошибки, затем найти значения ошибок положения, по которым можно построить график ошибки выходного звена и определить значение максимальной ошибки и положение механизма, в котором ошибка будет максимальна. Графики каждой первичной ошибки дак.т возможность су,дить о влиянии каждой частной ошибки на результиру ощую ошибку поло кения ведомого звена механизма.
[c.114]
Эта формула выражает зависимость ошибки положения AS как линейную функцию скалярных и модулей векторных первичных ошибок Aqi. Передаточное отношение dSldq,) —есть отношение малых перемещений ведомого и ведущего звеньев преобразованного механизма. Это отношение находится из плана малых перемещений, а не как частная производная.
[c.129]
Пример. На рис. 7.5, д, е. показаны схема механизма прибора и построение плана малых перемещений. Считаем, что шарнир О совпадает со своим теоретическим положением. Заданы по величине и направлению первичные ошибки леремещениа направляющей ползуна и нор-
[c.132]
Геометрический метод. По этому методу погрешность положения ведомого звена находится из геометрических построений на основании сопоставления двух механизмов теоретического и с первичной ошибкой. При установлении зависимостей между величиной первичной ошибки и ошибкой положения ведомого звена принимаются упрощения (например, sin (а -fAa) t sina tg(a -j-Aa) iiitga osAasril, длины дуги и хорды при малых углах равны и т. д.), которые снижают точность метода.
[c.116]
 С этим файлом связано 1 файл(ов). Среди них: Rekun.docx.
С этим файлом связано 1 файл(ов). Среди них: Rekun.docx.
Показать все связанные файлы
Подборка по базе: Общие сведения о горении и горючих веществах, пожаре и его разви, 01. Введение. Основные уравнения электродинамики.pdf, 1 Основные понятия и определения ИС.docx, Статья 3. Основные понятия, используемые в настоящем Федеральном, Тема 1. Первая помощь содержание, объем, организационные и юриди, Вредители свеклы. Основные вредители свеклы. Меры борьбы с ними., 3. Этические нормы и принципы оказания психологической помощи (1, Психическое здоровье и личное развитие. Критерии психического зд, МЕТОДИЧЕСКИЕ ОСНОВЫ СОЗДАНИЯ ИНФОРМАЦИОННЫХ СИСТЕМ И ТЕХНОЛОГИЙ , ПРАКТИЧЕСКАЯ РАБОТА № 3 Основные типы и форматы данных в электро
- CALS-технологии
CALS-технологии это непрерывная информационная поддержка поставок и жизненного цикла изделий, или ИПИ (информационная поддержка процессов жизненного цикла изделий) — информационные технологии, используемые в управлении процессами жизненного цикла изделия или системы, в основном для сложных (высокотехнологичных и наукоёмких) образцов продукции машиностроения и иных объектов техники.
В общем виде CALS-технологии — это процесс создания единого информационного пространства в отдельно взятой системе обеспечения жизненного цикла продукции. С развитием производственных систем возникла необходимость разработки механизмов и процедур оперативного обмена данными между различными субъектами производственных отношений на разных этапах использования изделий.
Первоначально данная концепция была реализована в вооруженных силах США для снижения объемов бумажного документооборота, повышения оперативности обратной связи между заказчиками и поставщиками вооружений и амуниции, повышении управляемости системы и снижении общих затрат на информационную область. Сама аббревиатура CALS обозначала «компьютерную поддержку поставок».
С течением времени CALS-технологии и CALS-системы значительно расширили поле своей деятельности. Различные отрасли машиностроения, строительных и транспортных сфер, область разработки проектов наукоемких производств. При этом если изначально применение ограничивалось производством и эксплуатацией, то теперь концепция действовала на всех стадиях жизненного цикла продукции.
Основные принципы CALS-технологий базируются на контроле и организации этапов существования продукции. К ним относят:
- Обеспечение системного управления (использование специальных информационных пространств);
- Минимизацию затрат на всех стадиях;
- Использование стандартных механизмов описания управляемых объектов (интеграция информационных потоков);
- Дифференциацию программных элементов на основе использования общих стандартов (данных и интерфейсов доступа) и применение платформ на коммерческой основе;
- Представление информации на безбумажной основе с приоритетом использования электронной подписи;
- Сопутствующий инжиниринг все процессов;
- Непрерывное корректирование и усовершенствование с целью создания оптимальной модели управления.
Создание информационной плоскости предполагает решение задачи на двух уровнях:
- Автоматизация отдельных элементов производства и формирование сопутствующих информационных потоков управления данными;
- Композиция различных информационных блоков (что помимо получения однородной информационной среды, гарантирует и композицию общей стратегии предприятия).
К преимуществам интегрированной среды можно отнести:
- Защиту данных во времени (обеспечение целостности);
- Обеспечение доступа к информации всех участников проекта, независимо от их положения в пространстве;
- Минимизацию потерь данных;
- Гибкость реагирования системы на внесенные коррективы (изменения доступны практически мгновенно в рамках всей системы);
- Повышение пропускной способности обработки данных;
- Широкие возможности разнообразных платформ проектирования и поддержки.
Перспективы применения CALS на промышленных предприятиях заключаются в формировании специализированной организационно-информационной среды, позволяющей:
- Значительно увеличить уровень кооперации различных производств за счет однородных стандартов обработки информации;
- Снизить влияние территориального расположения предприятий и тем самым ограничить влияние расстояний на эффективность взаимодействия;
- Создать виртуальные элементы производств, позволяющих контролировать процессы проектирования, производства и эксплуатации изделий на уровне отдельных практических задач;
- Защитить результаты работы на основе преемственности результатов работы на всех этапах жизненного цикла продукции;
- Оптимизировать затраты за счет снижения бумажных составляющих документооборота;
- Использовать «прозрачность» процессов управления и контроля, благодаря разработке интегрированных моделей;
- Создать мощную информационную поддержку всех этапов цикла производства;
- Создать общую систему стандартизации информации об изделии;
- Обеспечить требуемый уровень качества продукции.
Применение основ CALS-технологий крайне важно для соответствия уровня развития предприятия современным тенденциям на международной промышленной арене.
Примерами CALS-технологий являются цифровые методы проектирования производств, поддерживающие контроль жизненного цикла продукции (Product LifecycleManagement) — так называемые PLM-системы. К ним относят следующие классы систем:
- CAD – (Computer Aided Design) – решение задач проектирования изделий и элементов; моделирование объектов на плоскости (2D-модель) и в пространстве (3D-модель); средства получения чертежей; архивы данных по элементам конструкций и создание шаблонов документов.
- CAE – (Computer Aided Engineering) – исследование свойств объектов (при изготовлении и эксплуатации); создание проверочных систем анализа объекта по разработанной модели; оптимизация параметров объекта по заданным условиям и ограничениям.
- CAM — (Computer Aided Manufacturing) – программирование контроллеров станков с ЧПУ; исследование вариантов траектории инструмента по алгоритмам обрабатываемой поверхности; анализ геометрических конфликтов; подгонка к оборудованию.
- PDM — (Product Data Management) — хранение данных и контроль документации; создание архива образцов; обеспечение доступа к информации и ее защита.
CALS-технологии — это прежде всего методика информационной поддержки бизнес процессов, которая нашла свое применение в различных сферах производственной деятельности. Эффективность ее распространения и использования базируется на системной разработке соответствующей информационной среды. Для реализации данной цели необходимым условием является использование специальных композиционных подходов по формированию новых систем поддержки. Примером подобной компании на рынке России является НИЦ CALS-технологий «Прикладная логистика». Основные задачи компании лежат в плоскости прогрессивных платформ и нормативов их использования. Основными направлениями деятельности есть: осуществление оперативного наблюдения различных проектных данных и минимизация потерь продукции. НИЦ CALS-технологий — разработчик нескольких известных авторских платформ. Сделаем их краткий обзор.
Еще одной важной функцией вычислительных методов является управление различными ресурсами и потоками предприятия в реальном времени — материально-техническими, финансовыми, процессами складирования, персоналом, планированием и сбытом продукции. Системы, реализующие выполнение перечисленных задач относятся к ERP-системам (Enterprise Resource Planning − управление ресурсами предприятия).
Такие системы представляют новую методологию управление CALS-технологиями, которая реализует требуемый функционал на основе специальной информационной инфраструктуры.
К типовым функциям данного класса программных продуктов относят:
- Создание и контроль различных спецификаций (позволяют определить конечное изделие, учесть все необходимые ресурсы для производства);
- Управление сбытом продукции (прогноз реализации изделия на основе планов продаж);
- Анализ потребности в материалах (определение размера партий и сроков поставок, конкретных групп сырья и комплектующих);
- Организацию закупочной деятельности (формирование договоров о поставках, оптимизация складской деятельности предприятия);
- Планирование загрузки производственных мощностей (на уровне как всего предприятия, так и отдельных цехов или рабочих мест);
- Контроль финансовых ресурсов (учет и аудит финансов).
CALS-технологии в России используются на многих отечественных предприятиях, как гражданского, так и военного сектора. Электронная документация используется для многих изделий. К примеру, в авиации для самолетов, вертолетов, авиационных двигателей и комплектующих. Помимо этого, ведутся разработки систем навигации, телефонной и радио связи, управления. Применяются при проектировании и разработке автотракторной техники. Элементы системы используются на Воронежском механическом заводе, в государственной корпорации «Росатом», НПП «Аэросила», ОАО «Российские железные дороги» и др. Как видим, примеры CALS-технологии достаточно разнообразны.
2 Первичные ошибки, вторичные ошибки и их проявления
Под ошибкой в широком смысле слова понимается неправильность, погрешность или неумышленное, невольное искажение объекта или процесса. При этом подразумевается, что известно правильное или неискаженное эталонное состояние объекта, к которому относится ошибка. Считается, что если программа не выполняет того, что пользователь от нее ожидает, то в ней имеется ошибка.
Важной особенностью процесса выявления ошибок в сложных программах является отсутствие полностью определенной правильной программы-эталона, которому должен соответствовать проверяемый текст. Поэтому нельзя гарантированно утверждать, что возможно написать программу без ошибок.
Распределение выявленных ошибок
Искажения в тексте программ (первичные ошибки) являются элементами, подлежащими корректировке. Однако непосредственно наличие ошибки обнаруживаются по ее вторичным проявлениям. Искажение выходных результатов исполнения программ (вторичная ошибка) вызывает необходимость выполнения ряда операций по локализации устранению первичной ошибки (отладка программ).
Одним из критериев профессионального мастерства программистов является их способность обнаруживать и исправлять собственные ошибки. Начинающие программисты не умеют этого делать, у опытных программистов это не вызывает затруднений. Ошибки в программах делают все. Только программисты разной квалификации делают разные по сложности и количеству ошибки.
На этапе отладки программ выявляются и исправляются много ошибок, но не все. Опыт показывает, что всякая последняя найденная ошибка на самом деле является предпоследней, т.к. программисты не продумывают до конца последствия исправления найденной ошибки.
Убывание ошибок в программном обеспечении и интенсивность их обнаружения не беспредельно. После отладки в течение некоторого времени интенсивность обнаружения ошибок при самом активном тестировании снижается настолько, что разработчики попадают в зону нечувствительности к программным ошибкам и отказам. При такой интенсивности отказов программ трудно прогнозировать затраты времени, необходимые для обнаружения очередной ошибки. Создается представление о полном отсутствии ошибок в программе, о невозможности и бесцельности их поиска. Поэтому усилия на отладку сокращаются, и интенсивность обнаружения ошибок еще больше снижается. Этой предельно низкой интенсивности обнаружения отказов соответствует наработка на обнаруженную ошибку, при которой прекращается улучшение характеристик программного обеспечения на этапах его отладки и испытаний у заказчика.
Ошибку можно отнести к одному из ниже перечисленных классов:
- системные ошибки;
- ошибки в выборе алгоритма;
- алгоритмические ошибки;
- технологические ошибки;
- программные ошибки.
Системные ошибки в большом (сложном) программном обеспечении определяются, прежде всего неполной информацией о реальных процессах, происходящих в источниках и потребителях информации.
На начальных стадиях проектирования ПО не всегда удается точно сформулировать целевую задачу всей системы и требования к ней. В процессе проектирования ПО целевая функция системы уточняется и выявляются отклонения от уточненных требований, которые могут квалифицироваться как системные ошибки.
Некачественное определение требований к программе приводит к созданию программы, которая будет правильно решать неверно сформулированную задачу. В таких случаях, как правило, требуется полное перепрограммирование.
Признаком того, что создаваемая для заказчика программа может оказаться не соответствующей его истинным потребностям, служит ощущение неясности задачи. Письменная регистрация требований к программе заставляет заказчика собраться с мыслями и дать достаточно точное определение требований. Всякие устные указания являются заведомо ненадежными и часто приводят к взаимному недопониманию.
При автономной и в начале комплексной отладки ПО доля найденных системных ошибок в нем невелика (примерно 10%), но она существенно возрастает (до 35—40%) на завершающих этапах комплексной отладки. В процессе эксплуатации преобладающими являются системные ошибки (примерно 80% всех ошибок). Следует отметить также большое количество команд и групп программ, которые корректируются при исправлении каждой системной ошибки.
Ошибки в выборе алгоритма. В настоящее время накоплен значительный фонд алгоритмов для решения типовых задач.
К сожалению, часто плохой выбор алгоритма становится очевидным лишь после его опробования. Поэтому все же следует уделять внимание и время выбору алгоритма, с тем, чтобы впоследствии не приходилось переделывать каждую программу.
Во избежание выбора некорректных алгоритмов, необходимо хорошо ознакомиться с литературой по своей специальности.
К алгоритмическим ошибкам следует отнести, прежде всего, ошибки, обусловленные некорректной постановкой функциональных задач, когда в спецификациях не полностью оговорены все условия, необходимые для получения правильного результата. Эти условия формируются и уточняются в значительной части в процессе тестирования и выявления ошибок в результатах функционирования программ.
К алгоритмическим ошибкам следует отнести также ошибки связей модулей и функциональных групп программ. Их можно квалифицировать как ошибки некорректной постановки задачи. Алгоритмические ошибки проявляются в неполном учете диапазонов изменения переменных, в неправильной оценке точности используемых и получаемых величин, в неправильном учете связи между различными переменными, в неадекватном представлении формализованных условий решения задачи в спецификациях или схемах, подлежащих программированию и т.д. Эти обстоятельства являются причиной того, что для исправления каждой алгоритмической ошибки приходится изменять иногда целые ветви программного обеспечения, т.е. пока еще существенно больше операторов, чем при исправлении программных ошибок.
Алгоритмические ошибки значительно труднее поддаются обнаружению методами формализованного автоматического контроля. Вот почему необходимо тщательным образом продумывать алгоритм прежде, чем транслировать его в программу.
Некоторые программисты проверяют алгоритм следующим образом. Через несколько дней после составления алгоритма они повторно обращаются к описанию задачи и составляют алгоритм заново. Затем сличают оба варианта. Такой шаг на первый взгляд может показаться пустой тратой времени, однако всякая ошибка на уровне алгоритма может в дальнейшем обернуться катастрофой и повлечь основательный пересмотр программы.
Технологические ошибки — это ошибки документации и фиксирования программ в памяти ЭВМ. Они составляют 5—10 % от общего числа ошибок, обнаруживаемых при отладке. Большинство технологических ошибок выявляются автоматически формализованными методами (например, транслятором).
Программные ошибки. Языки программирования — это искусственные языки, созданные человеком для описания алгоритмов. Все предложения таких языков строятся по строгим синтаксическим правилам, обеспечивающим однозначное их понимание, что позволяет поручать расшифровку алгоритма ЭВМ, построенного по правилам семантики.