Содержание
- Communication error no connection mission planner
- Re: APM 2.8 HELP.
- Re: APM 2.8 HELP.
- Re: APM 2.8 HELP.
- Re: APM 2.8 HELP.
- Re: APM 2.8 HELP.
- Re: APM 2.8 HELP.
- Re: APM 2.8 HELP.
- Прошиваем контроллер APM. Загрузчик
- 1) Прошивка с помощью среды Arduino и программатора USBasp.
- 2) Прошивка с помощью программатора на базе FT232RL и программы Avrdude.
- 3) Прошивка с помощью программатора USBasp и программы Avrdude.
- Discussions
- Connection Error in APM Mission Planner with wireless telem
- Replies
- Communication error no connection mission planner
- Replies
Communication error no connection mission planner
Dok2,
Тогда, к сожалению подсказать не могу — если инфа скачивается, то провод рабочий. Я только с мультиви игрался, а у нее проблема была — не видит плату вообще.
Мои увлечения: мотовездеход и жизнь в деревне: http://dachmech.ru/
Re: APM 2.8 HELP.
Ок,тогда буду ждать, может еще кто нибудь откликнется, я еще видео снял как подключал и отправил продавцу, может китайцы подскажут что делать.
Re: APM 2.8 HELP.
В Компьютер-Свойства-Диспетчере устройств в свойствах порта скорость 115200 выставлена? Можно попробовать прошивку через Arduino IDE залить.
Re: APM 2.8 HELP.
Да, скорость порта 11500, пробовал другие варианты, не помогает.
А есть инструкция для заливки через Ардуино?
Re: APM 2.8 HELP.
Поскольку APM 2.8 это ардуино совместимая платформа на микроконтроллере ATmega 2560, инструкций много на любой вкус. ) Программа для ардуино называется скетчем. Просто набираете в любом поисковике «загрузка скетчей в ардуино.» Скетчи для APM можно посмотреть в репозитории.
Re: APM 2.8 HELP.
К автору топика:
Проблему решили?
У меня ровно такая же ситуация — ardupilot 2.8, прошитый ArduCopteroм и с самого начала не могу туда залить ArduPlane.
Долго детектится устройство в Mission planer, потом сливается из устройства hex(видимо текущая прошивка) и в конце выдает «Communication Error — no connection».
Re: APM 2.8 HELP.
Wowics,
Добрый день. Да, я решил. проблему.
Программа APMPlanner2
Попробуйте заменить драйвера контроллера Arduino MEGA 2560 на драйвера из папки которая идет вместе с программой, папка Drivers . C:Program Files (x86)APMPlanner2Drivers
мне помогло.
если не поможет то можно попробовать обновить bootloader так мне посоветовал китайский продавец моего контроллера
и прислал эту ссылку
http://diydrones.com/forum/topics/apm-p … 4-released
напишите если получиться исправить проблемму
Re: APM 2.8 HELP.
Уфф, решил проблему, почти день на это потратил.
Сначала пошел свои путем — с помощью USBASP и Arduino IDE прошил загрузчик.
После прошивки загрузчика Mission Planer позволяет залить фирмварь только ОДИН раз.
Чтобы еще раз залить, надо еще раз прошивать загрузчик.
Но, прошитый ArduPlane 3.3.0 не отвечает по Mavlink. Совсем ни гу-гу.
Тут прочел предыдущее сообщение и поставил APMPlanner2.
Из него прошивка заливается, действительно, сколько угодно раз.
Но залитый ArduPlane работать отказывается и красный диодик в углу платы не мигает.
Писец, короче, плата мертва.
С горя залит ArduCopter — и ВАУ: диодик замигал, связь с платой по mavlink установлена, гироскопы работают!
Но мне же нужен ArduPlane, а не ArduCopter!
Заливаю бету ArduPlane 3.4 -работает!
Скачиваю с сайта и заливаю текущий последний стабильный релиз ArduPlane 3.3.0 — не работает.
В результате залил скачанный с сайта ArduPlane 3.2.3, не доверяю бетам. Все работает
Итого резюм: версия ArduPlane 3.3.0, которая считается сейчас последним стабильным релизом — битая.
Или не годится именно для моей платы.
Зы: Внимательно обследовал свою плату — компас не распаян, флюс не отмыт и вообще качество хреновое. И никакого знака, что она 2.8. Буду с китайца по этому поводу через диспут деньги стрясать.
Источник
Прошиваем контроллер APM. Загрузчик
Для нормального процесса загрузки прошивки в основную микросхему Atmega2560 контроллера, необходимо наличие в ней загрузчика. Что и как делать — описано в этой статье.
Каким образом он там не оказался сразу, как мог слететь, мы разбираться не будем, а начнем делать процедуру восстановления.
Нам понадобится подключение к ISP разъему на плате. Питание подключать нет необходимости (берется с программатора). 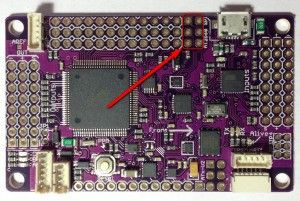 Разъем ISP для Atmega2560
Разъем ISP для Atmega2560
Распиновка разъема ISP: 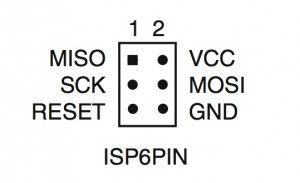 Распиновка ISP
Распиновка ISP
Есть несколько способов прошивки (по сути делается одно и тоже, только разными средствами):
- Прошивка с помощью среды Arduino и программатора USBasp.
- Прошивка с помощью программатора на базе FT232RL и программы Avrdude.
- Прошивка с помощью программатора USBasp и программы Avrdude.
Внимание! Версии, сборки и конфиги Avrdude, представленные здесь, различаются, поэтому качаем архив под каждый программатор по своей ссылке.
1) Прошивка с помощью среды Arduino и программатора USBasp.
Скачиваем свежую сборку среды Arduino отсюда или по прямой ссылке zip-архив. Распаковываем архив например в корень диска C.
Подключаем программатор к разъему ISP контроллера. Запускаем исполняемый файл среды программирования: arduino-1.0.5arduino.exe.
Далее необходимо выбрать плату — Arduino Mega 2560: 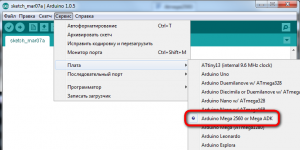 Arduino. Выбор платы
Arduino. Выбор платы
Далее необходимо выбрать программатор USBasp: 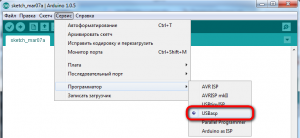 Arduino. Выбор программатора
Arduino. Выбор программатора
Запускаем процесс прошивки загрузчика: 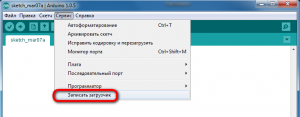 Arduino. Записать загрузчик
Arduino. Записать загрузчик
Дожидаемся сообщения «Загрузка завершена» в нижней части окна. Если в процессе прошивки в среде Arduino в нижней части окна наблюдались ошибки, то проверяем правильность выбора платы и программатора, а также подключение разъема ISP. Пробуем заново.
При использовании данного способа фьюзы проставляются автоматически (среда Arduino все делает сама). Ничего дополнительно делать не надо.
2) Прошивка с помощью программатора на базе FT232RL и программы Avrdude.
Нам потребуется программатор, собранный по этой схеме: 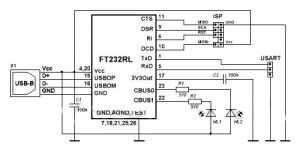 Схема программатора на FT232RL
Схема программатора на FT232RL
Ранее о нем уже говорили, когда прошивали загрузчик на PPM-encoder.
Существует прикол, что китайцы путают подписи выводов, или просто их не делают. Например был случай, что написано «RSD», а по даташиту «DSR». В этом случае прослеживаем по ножкам микросхемы.
Чтобы прошить мегу по ISP, нужно соединить:
11 ногу ft232RL с MISO
9 ногу ft232RL с SCK
6 ногу ft232RL с RST
10 ногу ft232RL с MOSI
А так же подать питание и землю от переходника.
Нам необходима программа Avrdude с настроенным на Atmega2560 конфигом, библиотека для работы Avrdude и FT232 и файл прошивки загрузчика. Все есть тут (спасибо Алексею Козину).
- Распаковываем архив в удобную папку, например в корень диска C.
- Подключить программатор к ПК, проследить чтоб корректно встали драйвера (о чем красноречиво скажет появление в системе еще одного ком-порта), подключаем программатор к ISP разъему Atmega2560 на плате APM.
- Запускаем файл «boot2560.bat» и наслаждаемся процессом. В конце видим сообщение о завершении процесса прошивки.
При использовании данного способа фьюзы проставляются автоматически (команда в bat файле). Ничего дополнительно делать не надо.
3) Прошивка с помощью программатора USBasp и программы Avrdude.
Чтобы прошить мегу по ISP, нужно соедить:
MISO программатора с MISO разъема ISP на контроллере.
SCK программатора с SCK разъема ISP на контроллере.
RST программатора с RST разъема ISP на контроллере.
MOSI программатора с MOSI разъема ISP на контроллере.
А так же подать питание и землю от переходника.
Нам необходима программа Avrdude с настроенным на Atmega2560 конфигом, драйвера для программатора USBasp, и файл прошивки загрузчика. Все есть тут.
- Распаковываем архив в удобную папку, например в корень диска C.
- Подключаем программатор к ПК, по необходимости устанавливаем драйвер из архива, подключаем программатор к ISP разъему Atmega2560 на плате APM.
- Для прошивки фьюзов запускаем файл «boot2560-fuses.bat».
- Запускаем файл «boot2560.bat» и наслаждаемся процессом. В конце видим сообщение о завершении процесса прошивки.
Раз речь пошла о фьюзах, то перечислю их для заметки:
low_fuses=0xFF
high_fuses=0xD8
extended_fuses=0xFD
lock_bits=0x0F
После успешного процесса прошивки загрузчика можно попробовать загрузить основную прошивку в контроллер через Mission Planner (описано в предыдущей статье). Если все работает, значит загрузчик был успешно залит и работает должным образом.
Update 30.03.2014:
При прошивке 3-м способом наблюдается проблема с верификацией . Так понял, что это проблема дешевых программаторов, которые некорректно работают с размером памяти >128кб. Но все работает. Главное не пугаться, если в консоли долго строчки не обновляются. Процесс не быстрый (около 5 минут).
Update 13.01.2017:
Если после прошивок загрузчиков и основных прошивок наблюдаются проблемы с заливкой прошивки через Mission Planner, то рекомендуется сделать очистку чипа средствами программатора (обычно в программе это называется «Erase chip»).
Один из примеров, как это помогло.
Если вы нашли ошибку на странице, то нажмите Shift + Enter или нажмите здесь, чтобы уведомить нас.
Источник
Discussions
Connection Error in APM Mission Planner with wireless telem
Earlier today I had the Mission Planner communicating perfectly with the APM (1.4). But now when ever I try to connect the usual window comes up and says «Getting Params.. (sysid 1 compid 1)». Then that stays for roughly 30seconds then I get «Connect Failed»
What is really interesting is that when I use HK GCS it connects no problem.
I do have the baud at 57k and I have run the X-CTU on both XBees and everything seemed good there. What else should I try?
You need to be a member of diydrones to add comments!
Any progress with the » Getting Params.. (sysid 1 compid 1)» error? I have been using for more than an year an APM 2.5 board with ArduPlane firmware. I used various ways to connect to the board: FTDI, Prolific, Bluetooth and 3D Radio. Everything was OK until recently after a Mission Planner update occurred. Since then, I could not connect with anything to my APM 2.5 board, well. almost anything, the USB connection still works. I have 2 different PCs (Win7 64bit and XP Professional) and I can’t connect anymore on both of them after updating Mission Planner. I must mention that I disconnected the Minim OSD too.
I tried to re-install Mission Planner and even downgraded the firmware on APM board ( I had 3.x and now I have 2.8.x), I reset everything to default). no way to connect using something else than USB. I repeat, the issue appeared after updating MP on both PCs. The only thing to test is to remove all the wiring (aarrghhh, they deep inside the foam 🙁 ) and change the connecting wires.
Anyone knows what the heck is happening? I have encountered this » Getting Params.. (sysid 1 compid 1)» scenario several times on forums and nobody came with a solution.
Now it struck me that I could search for an older version of Mission Planner (I hope I will find one somewhere).I is very annoying, instead of flying and enjoying my good old APM I am struggling to make a lousy serial connection :(..
L.E: I forgot to mention that yesterday I tried a new software for me, APM Planner (I did know about it) and it connected flawlessly every time, with no error. Anyway, I am interested in using Mission Planner as I am more familiar with it.
For a few days, Iv’e been trying to hook up a JY-MCU Bluetooth module v1.06 to the 3DR 433Mhx radio, as per Arthur Benemann’s instructions.
In order to reduce the 5V TX signal from the 3DR radio to the 3.3v level used by the BT module, I’ve used a couple of resistors (3.3V signal from BT module to 3DR radio should work).
When attempting to connect from MP, the BT module’s «not connected» blinking would hesitate for just a moment before MP drops an error.
Testing from Android with Droidplanner and Andropilot was also fruitless.
To test the link, I ended up creating a loop, connecting two terminal sessions, one to a USB connected 3DR radio and the other session to the BT serial port, in turn connected to the «remote» 3DR module. Something like this:
PC <> 3DR (USB) <> radio link <> 3DR (Serial) <> BT module <> BT link <> PC
Success — everything is working and there is no noticeable lag or delay. Even file transfer from one terminal to another was working.
Last evening, I found this thread and the mentioning of the Ctrl+T connect command.
Using Ctrl+T, MP now connects using Bluetooth without any hesitation. 🙂
Everything seems to be working and I have the same speed as when I use the 3DR module with USB (57600bps).
I’m quite happy that it is working, but I am also quite annoyed:
- Why do I need to use Ctrl+T from MP?
It seems that it is not even trying to connect to the BT module (Timeout while waiting for BT to open connection?) - Why is neither Andropilot nor Droidplanner working at all?
Does anyone have any suggestions? What have I missed?
Should I replace the BT module with another, and if so with what?
What should I try?
(Obviously, I’ve been testing a number of different laptops and Android devices)
Источник
Communication error no connection mission planner
Just purchased a ready-to-fly 3DR Hexa-C and installed drivers, downloaded and installed MissionPlanner-1.2.48 software. Followed instructions to uploaded 2.9.1b firmware first before even thinking of selecting Connect button.
Oh ya, I also verified correct Com Port, and bits per sec (115200) for both the com port and mission Planner. The problem I see at or near the end of Read Hex File is a alert window «Communication Error-No Connection».
At this point I have swapped USB cables 3x, uninstalled and installed MissionPlanner-1.2.46, even uninstalled USB driver «Arduino Mega 2560» and installed arduino-1.0.4’s driver.
Lastly, I opened the Mission Planner software and selected «Terminal» I observed «com port open» but was not able to send commands to module.
This was test on both my laptops (one I’m typing on is a Windows 7 laptop, the other was my Windows 8 laptop with driver signatures turned off.
What in the world am I doing wrong! This should be this difficult. Help!
You need to be a member of diydrones to add comments!
Disabling all other COM ports worked for me too! Thanks for the info
After much troubleshooting and endless evenings trying everything under the sun, such as reformatting the notebook and installing Windows 7 and uninstalling the older version of Mission Planner 1.2.48 and installing 1.2.50. I still had no joy connecting to the APM 2.5.
Then I sat back and looked at the Hexa-C and noted that I had a stabilized camera platform with a gyro and a cable which was correctly connected to the Pitch Servo plug located on the bottom side of my copter. So out of pure desperation, I decided to unplug it. Low and behold! The APM started talking to the notebook and Mission Planner. At this point I do not believe the old version software was ever the issue. It seems the Pitch Servo is possible pinned put incorrectly or the Turney TGY-90S is defective.
Attached are photos of the camera stabilzed platform and its servo cable connector.
Where do I go from here with respect to connecting the stabilized platform to the APM?
Источник

Hi guys! I have lastest version of mission planner (1.2.70 mav 1.0) and my APM 2.5 hardware and When I try to load firmware, it start to read hex file… and after a few seconds I have this issue: Communication Error — no connection.
Please any idea? What Im doing wrong?
thanks!
Loading …
![]()
RT @chr1sa: Donkeycar 4.4 released with tons of new features, including path learning (useful with GPS outdoors), better Web and Lidar supp…
![]()
RT @NXP: We are already biting our nails in anticipation of the #NXPCupEMEA challenge! 😉 Did you know there are great cash prizes to be won…
![]()
RT @gclue_akira: レースまであと3日。今回のコースは激ムズかも。あと一歩
#jetracer https://t.co/GKcEjImQ3t
![]()
![]()
RT @chr1sa: The next @DIYRobocars autonomous car race at @circuitlaunch will be on Sat, Dec 10.
Thrills, spills and a Brazilian BBQ. Fun…
![]()
RT @arthiak_tc: Donkey car platform … Still training uses behavioral cloning #TCXpo #diyrobocar @OttawaAVGroup https://t.co/PHBYwlFlnE
![]()
RT @emurmur77: Points for style. @donkeycar racing in @diyrobocars at @UCSDJacobs thanks @chr1sa for taking the video. https://t.co/Y2hMyj1…
![]()
RT @SmallpixelCar: Going to @diyrobocars race at @UCSDJacobs https://t.co/Rrf9vDJ8TJ
![]()
RT @SmallpixelCar: Race @diyrobocars at @UCSDJacobs thanks @chr1sa for taking the video. https://t.co/kK686Hb9Ej
![]()
RT @PiWarsRobotics: Presenting: the Hacky Racers Robotic Racing Series in collaboration with #PiWars. Find out more and register your inter…
![]()
RT @Hacky_Racers: There will be three classes at this event: A4, A2, and Hacky Racer! A4 and A2 are based around UK paper sizing and existi…
![]()
![]()
![]()
![]()
RT @NeaveEng: Calling all UK based folks interested in @diyrobocars, @f1tenth, @donkey_car, and similar robot racing competitions! @hacky_r…
![]()
RT @araffin2: 🏎️
After hours of video editing, I’m happy to share a best of my Twitch videos on learning to race with RL.
🏎️
Each part is…
More…
Loading …

Для нормального процесса загрузки прошивки в основную микросхему Atmega2560 контроллера, необходимо наличие в ней загрузчика. Что и как делать — описано в этой статье.
Каким образом он там не оказался сразу, как мог слететь, мы разбираться не будем, а начнем делать процедуру восстановления.
Нам понадобится подключение к ISP разъему на плате. Питание подключать нет необходимости (берется с программатора).
Распиновка разъема ISP:
Есть несколько способов прошивки (по сути делается одно и тоже, только разными средствами):
- Прошивка с помощью среды Arduino и программатора USBasp.
- Прошивка с помощью программатора на базе FT232RL и программы Avrdude.
- Прошивка с помощью программатора USBasp и программы Avrdude.
Внимание! Версии, сборки и конфиги Avrdude, представленные здесь, различаются, поэтому качаем архив под каждый программатор по своей ссылке.
1) Прошивка с помощью среды Arduino и программатора USBasp.
Скачиваем свежую сборку среды Arduino отсюда или по прямой ссылке zip-архив. Распаковываем архив например в корень диска C.
Подключаем программатор к разъему ISP контроллера. Запускаем исполняемый файл среды программирования: arduino-1.0.5arduino.exe.
Далее необходимо выбрать плату — Arduino Mega 2560:
Далее необходимо выбрать программатор USBasp:
Запускаем процесс прошивки загрузчика:
Дожидаемся сообщения «Загрузка завершена» в нижней части окна. Если в процессе прошивки в среде Arduino в нижней части окна наблюдались ошибки, то проверяем правильность выбора платы и программатора, а также подключение разъема ISP. Пробуем заново.
При использовании данного способа фьюзы проставляются автоматически (среда Arduino все делает сама). Ничего дополнительно делать не надо.
2) Прошивка с помощью программатора на базе FT232RL и программы Avrdude.
Нам потребуется программатор, собранный по этой схеме:
Ранее о нем уже говорили, когда прошивали загрузчик на PPM-encoder.
Существует прикол, что китайцы путают подписи выводов, или просто их не делают. Например был случай, что написано «RSD», а по даташиту «DSR». В этом случае прослеживаем по ножкам микросхемы.
Чтобы прошить мегу по ISP, нужно соединить:
11 ногу ft232RL с MISO
9 ногу ft232RL с SCK
6 ногу ft232RL с RST
10 ногу ft232RL с MOSI
А так же подать питание и землю от переходника.
Нам необходима программа Avrdude с настроенным на Atmega2560 конфигом, библиотека для работы Avrdude и FT232 и файл прошивки загрузчика. Все есть тут (спасибо Алексею Козину).
- Распаковываем архив в удобную папку, например в корень диска C.
- Подключить программатор к ПК, проследить чтоб корректно встали драйвера (о чем красноречиво скажет появление в системе еще одного ком-порта), подключаем программатор к ISP разъему Atmega2560 на плате APM.
- Запускаем файл «boot2560.bat» и наслаждаемся процессом. В конце видим сообщение о завершении процесса прошивки.
При использовании данного способа фьюзы проставляются автоматически (команда в bat файле). Ничего дополнительно делать не надо.
3) Прошивка с помощью программатора USBasp и программы Avrdude.
Чтобы прошить мегу по ISP, нужно соедить:
MISO программатора с MISO разъема ISP на контроллере.
SCK программатора с SCK разъема ISP на контроллере.
RST программатора с RST разъема ISP на контроллере.
MOSI программатора с MOSI разъема ISP на контроллере.
А так же подать питание и землю от переходника.
Нам необходима программа Avrdude с настроенным на Atmega2560 конфигом, драйвера для программатора USBasp, и файл прошивки загрузчика. Все есть тут.
- Распаковываем архив в удобную папку, например в корень диска C.
- Подключаем программатор к ПК, по необходимости устанавливаем драйвер из архива, подключаем программатор к ISP разъему Atmega2560 на плате APM.
- Для прошивки фьюзов запускаем файл «boot2560-fuses.bat».
- Запускаем файл «boot2560.bat» и наслаждаемся процессом. В конце видим сообщение о завершении процесса прошивки.
Раз речь пошла о фьюзах, то перечислю их для заметки:
low_fuses=0xFF
high_fuses=0xD8
extended_fuses=0xFD
lock_bits=0x0F
После успешного процесса прошивки загрузчика можно попробовать загрузить основную прошивку в контроллер через Mission Planner (описано в предыдущей статье). Если все работает, значит загрузчик был успешно залит и работает должным образом.
Update 30.03.2014:
При прошивке 3-м способом наблюдается проблема с верификацией. Так понял, что это проблема дешевых программаторов, которые некорректно работают с размером памяти >128кб. Но все работает. Главное не пугаться, если в консоли долго строчки не обновляются. Процесс не быстрый (около 5 минут).
Update 13.01.2017:
Если после прошивок загрузчиков и основных прошивок наблюдаются проблемы с заливкой прошивки через Mission Planner, то рекомендуется сделать очистку чипа средствами программатора (обычно в программе это называется «Erase chip»).
Один из примеров, как это помогло.
Если вы нашли ошибку на странице, то нажмите Shift + Enter или нажмите здесь, чтобы уведомить нас.
This div height required for enabling the sticky sidebar
My new APM Mini arrived today and I have been trying to load the new 2.6 firmware onto it without any luck!
This is just the board, no compass/esc/receiver attached.
This is the order of events.
I start Mission Planner
Connect Board (lights = Green solid, flashing Red & rapid Blue)
Hit Connect
Splash screen = Mavlink Connecting (green bar goes across)
Splash screen = New Firmware available hit OK
Hit Disconnect to down load
Go to Initial Setup then Install Firmware
Pick Hex version X
It is detecting board version then reading Hex (green bar stops from the end) then I get a splash screen «Communication Error – no connection»

The Internet is working as I am getting emails & browsing the web plus posting on forum!!!
Any help or ideas would be very welcome.
try a different USB cable, preferably a shorter one
TBS Tango 2
FatShark Dominator V3 with RapidFire Module
Armattan Chameleon-BF3.5.7
TBS Source One, KL100 Micro, Mobula7 HD
DJI Mavic Pro
[url=»https://www.youtube.com/c/paul01″]https://www.youtube.com/c/paul01[/url]
also if on a PC use the ports at the back not the front
TBS Tango 2
FatShark Dominator V3 with RapidFire Module
Armattan Chameleon-BF3.5.7
TBS Source One, KL100 Micro, Mobula7 HD
DJI Mavic Pro
[url=»https://www.youtube.com/c/paul01″]https://www.youtube.com/c/paul01[/url]
I’ve tried my laptop as well with no luck. The USB cable I have is only 24 inch long, but you have made me think now. Cheers.
Thinking back when I first started (I must have tried 8-9 times now) I was getting splash screens saying «connection with com port/denied» or «no connection with diydrones».
I had an issue loading the latest firmware on my mini apm in mission planner and managed to do it using APM planner, which seemed to resolve the issue in Mission Planner.
- 1 person likes this.
TBS Tango 2
FatShark Dominator V3 with RapidFire Module
Armattan Chameleon-BF3.5.7
TBS Source One, KL100 Micro, Mobula7 HD
DJI Mavic Pro
[url=»https://www.youtube.com/c/paul01″]https://www.youtube.com/c/paul01[/url]
When you first start mission planner then connect the FC via usb don’;t click connect first. Install the firmware and connect only when it has installed.
Gerry
The man serving me in the canteen said «Look, You can see the face of Jesus in the Margarine» The Asian guy next to me replied «I can’t believe it’s not Budda»
[url=»http://www.namfc.co.uk/pictures/fly.gif»]http://www.namfc.co.uk/pictures/fly.gif[/url]
Just tried to download APM Planner 2, but the download speed is soooooooooo slow it will take about an hour to save the file, maybe, just maybe it’s their web site that’s giving me my troubles! 
TBS Tango 2
FatShark Dominator V3 with RapidFire Module
Armattan Chameleon-BF3.5.7
TBS Source One, KL100 Micro, Mobula7 HD
DJI Mavic Pro
[url=»https://www.youtube.com/c/paul01″]https://www.youtube.com/c/paul01[/url]
Just tried again and got this splash screen.
Check port settings or port in use? System. Exception: Upload failed. Lost sync. Try Arduino!! @ Mission Planner. Utilities .Firmware.Upload Flasah (string comport. String filename,boards board)in C:UsershogDocumentsVisual Studio 2010ProjectsArdupilot MegaArdupilotMegaUtilitesFirmware cs:line 1066


try loading a different firmware like Arduplane, and if that works try flashing Arducopter
TBS Tango 2
FatShark Dominator V3 with RapidFire Module
Armattan Chameleon-BF3.5.7
TBS Source One, KL100 Micro, Mobula7 HD
DJI Mavic Pro
[url=»https://www.youtube.com/c/paul01″]https://www.youtube.com/c/paul01[/url]
have you checked that the board shows up in device manager?
TBS Tango 2
FatShark Dominator V3 with RapidFire Module
Armattan Chameleon-BF3.5.7
TBS Source One, KL100 Micro, Mobula7 HD
DJI Mavic Pro
[url=»https://www.youtube.com/c/paul01″]https://www.youtube.com/c/paul01[/url]
Sounds similar to the issue i had, couldn’;t flash it with mission planner in windows until i updated it in APM planner on my Mac. Not quite sure to suggest next other than the USB cable
TBS Tango 2
FatShark Dominator V3 with RapidFire Module
Armattan Chameleon-BF3.5.7
TBS Source One, KL100 Micro, Mobula7 HD
DJI Mavic Pro
[url=»https://www.youtube.com/c/paul01″]https://www.youtube.com/c/paul01[/url]
Every think else is working i.e.: I can set up the radio, tell it which is up and down etc. just can’t update it.
Will try tomorrow with a new USB cable, been at it over eight hours now! Time for a coffee and lie down. lol.
Many thanks for your help and input will keep you posted.
Quote from: FlyingMouse on Friday,February 06, 2015, 20:33:09
Every think else is working i.e.: I can set up the radio, tell it which is up and down etc. just can’t update it.
Will try tomorrow with a new USB cable, been at it over eight hours now! Time for a coffee and lie down. lol.
Many thanks for your help and input will keep you posted.
Could it be a firewall issue? It seems that Mission Planner connects to your APM fine but the download of the firmware fails.
-rw-rw-rw- – The Number of the Beast
I had this happen with an RCTimer APM 2.6 clone. It was okay at first, loaded up the 3.2 quad firmware no probs. Then one day tried to load a Hex firmware on it and … nothing. Exactly as FlyingMouse describes. I never solved it, the APM is now back in its packet with uncertain firmware on it! I really ought to get it out and work at it again.
—
Danny
«Its better than bad, its good»
Current FCs: Pixhawk, APM 2.6, Naza M V2, Naze32, Flip32+ CC3D, KK2.1.5
Aircraft: miniMax Hex, DJI 550 (clone) TBS Disco, 450 Firefly, 250 Pro, ZMR250, Hubsan X4, Bixler 2
I have a Mac. If you want you can send it to me and I can try and flash it for you.
PM me and I’;ll send you my address. Same goes for you Hands0n.
A new way of buying and selling RC Gear.
[url=»//www.rcmungo.com»]www.rcmungo.com[/url]
Craft: RE Decker 180, RE X1, HK Thorax, Hubsan X4, Q4
FC: Naze32, Flip32, Sparky, CC3D, SP Racing F3
VRX: RCD T-Box — 40 Channel Diversity
Cheers @tupoar — I have a Mac also — I can’;t remember if I tried it in APM Planner, it was a bit of a rush as I’;d sold it on to someone and it went wrong, so I was trying to find out what was wrong with it. It is in my box ‘;o bits now … waiting for another slug at it.
I’;ll watch this thread and if a Mac sorts it I’;ll dig it out and try again.
I do need to find out how to install a bootloader in to the PPM Encoder so that I can update that to the current version of the firmware also.
—
Danny
«Its better than bad, its good»
Current FCs: Pixhawk, APM 2.6, Naza M V2, Naze32, Flip32+ CC3D, KK2.1.5
Aircraft: miniMax Hex, DJI 550 (clone) TBS Disco, 450 Firefly, 250 Pro, ZMR250, Hubsan X4, Bixler 2
Hmm, I had a spare 10 minutes, hooked it up to the Mac. It does appear that the RCTimer APM 2.5 has effectively bricked itself. Stuck on whatever version of the ArduCopter code was last installed.
No bootloader — it will take some serious reprogramming of the Atmel 2560
[attachimg=1]
—
Danny
«Its better than bad, its good»
Current FCs: Pixhawk, APM 2.6, Naza M V2, Naze32, Flip32+ CC3D, KK2.1.5
Aircraft: miniMax Hex, DJI 550 (clone) TBS Disco, 450 Firefly, 250 Pro, ZMR250, Hubsan X4, Bixler 2
TBS Tango 2
FatShark Dominator V3 with RapidFire Module
Armattan Chameleon-BF3.5.7
TBS Source One, KL100 Micro, Mobula7 HD
DJI Mavic Pro
[url=»https://www.youtube.com/c/paul01″]https://www.youtube.com/c/paul01[/url]
Quote from: tupoar on Saturday,February 07, 2015, 09:10:57
I have a Mac. If you want you can send it to me and I can try and flash it for you.PM me and I’;ll send you my address. Same goes for you Hands0n.
Many thanks PM sent. I tried again this morning with a new USB cable with no luck.
But got a splash screen with is;
Check port settings or Port in use?System. Exception; Upload failed. Lost sync. Try Arduino!!
At Mission Planner. Utilites. Firmware. Upload Flash(String comport. String filename, boards
Board). In c :UserhogDocumentsVisual Studio 2010ProjectsArdupilotMegaArdupilotMegaUtilitiesFirmware.cs:line
1066
Quote from: FlyingMouse on Saturday,February 07, 2015, 14:12:50
Check port settings or Port in use?System. Exception; Upload failed. Lost sync. Try Arduino!!
At Mission Planner. Utilites. Firmware. Upload Flash(String comport. String filename, boards
Board). In c :UserhogDocumentsVisual Studio 2010ProjectsArdupilotMegaArdupilotMegaUtilitiesFirmware.cs:line
1066
Could you send me the file it mentions Firmware.cs? might be able to point you in the right direction if i have a look
TBS Tango 2
FatShark Dominator V3 with RapidFire Module
Armattan Chameleon-BF3.5.7
TBS Source One, KL100 Micro, Mobula7 HD
DJI Mavic Pro
[url=»https://www.youtube.com/c/paul01″]https://www.youtube.com/c/paul01[/url]
—
Danny
«Its better than bad, its good»
Current FCs: Pixhawk, APM 2.6, Naza M V2, Naze32, Flip32+ CC3D, KK2.1.5
Aircraft: miniMax Hex, DJI 550 (clone) TBS Disco, 450 Firefly, 250 Pro, ZMR250, Hubsan X4, Bixler 2
Quote from: Paul01 on Saturday,February 07, 2015, 14:32:41
Could you send me the file it mentions Firmware.cs? might be able to point you in the right direction if i have a look
Sorry, but where do I find his file? In my «C» hard drive or in the programme, sorry but this is now beyond me!!!

Hold the windows logo key and press R, and now paste the following line into the box that appears
c :UserhogDocumentsVisual Studio 2010ProjectsArdupilotMegaArdupilotMegaUtilities
then press Enter, and the file should be in the window that opens up
TBS Tango 2
FatShark Dominator V3 with RapidFire Module
Armattan Chameleon-BF3.5.7
TBS Source One, KL100 Micro, Mobula7 HD
DJI Mavic Pro
[url=»https://www.youtube.com/c/paul01″]https://www.youtube.com/c/paul01[/url]
Tried that, no luck says not found or file may have been moved.
I also tried changing the word hog after User to log, as I don’t recognise the word hog in computer language!
Will run PM again see what it says this time!
Подписываемся на VK
Ежедневные новости, видео и приколы…
YouTube канал

Магазин
TOP статьи
Оборудование
Плосколеты
Создание авиамоделей
Вход
|
|
|||||
|
Для удобства пользования форумом и поиска информации прошу придерживаться правила: 1 тема = 1 вопрос. К примеру, если обсуждается настройка передатчика, а у вас вопрос про подключение такого же передатчика к симулятору или вопрос про другую модель передатчика — создавайте новую тему. Если вы новичок в авиамоделизме, рекомендуется прочитать статью Новичку и ссылки с нее. Исключение только в разделе Вопросы и обсуждения по статьям Как выложить фото, Как опубликовать видео С уважением, Константин.
Страница: APM 2.8 HELP!!!Доброй ночи. Помогите!!! Не получается залить прошивку в APM 2.8, Win 7 64 (пробовал на Xp и Win 8 64) драйвер установил, скорость порта 115200,пытаюсь залить прошивку, выбираю коптер, затем Mission planer пишет «Communication Error — no connection». Танцевал с бубном… ни чего не помогает.
Администратор отключил публичную отправку сообщений Re: APM 2.8 HELP!!! Dok2, Мои увлечения: мотовездеход и жизнь в деревне: http://dachmech.ru/
Администратор отключил публичную отправку сообщений Re: APM 2.8 HELP!!! Спасибо что откликнулись )
Администратор отключил публичную отправку сообщений Re: APM 2.8 HELP!!! Dok2, Мои увлечения: мотовездеход и жизнь в деревне: http://dachmech.ru/
Администратор отключил публичную отправку сообщений Re: APM 2.8 HELP!!!Ок,тогда буду ждать, может еще кто нибудь откликнется, я еще видео снял как подключал и отправил продавцу, может китайцы подскажут что делать.
Администратор отключил публичную отправку сообщений Re: APM 2.8 HELP!!!В Компьютер-Свойства-Диспетчере устройств в свойствах порта скорость 115200 выставлена? Можно попробовать прошивку через Arduino IDE залить.
Администратор отключил публичную отправку сообщений Re: APM 2.8 HELP!!! Да, скорость порта 11500, пробовал другие варианты, не помогает.
Администратор отключил публичную отправку сообщений Re: APM 2.8 HELP!!!Поскольку APM 2.8 это ардуино совместимая платформа на микроконтроллере ATmega 2560, инструкций много на любой вкус. ) Программа для ардуино называется скетчем. Просто набираете в любом поисковике «загрузка скетчей в ардуино.» Скетчи для APM можно посмотреть в репозитории.
Администратор отключил публичную отправку сообщений Re: APM 2.8 HELP!!! К автору топика:
У меня ровно такая же ситуация — ardupilot 2.8, прошитый ArduCopteroм и с самого начала не могу туда залить ArduPlane.
Администратор отключил публичную отправку сообщений Re: APM 2.8 HELP!!!Wowics,
если не поможет то можно попробовать обновить bootloader так мне посоветовал китайский продавец моего контроллера http://diydrones.com/forum/topics/apm-p … 4-released напишите если получиться исправить проблемму
Администратор отключил публичную отправку сообщений Re: APM 2.8 HELP!!!Уфф, решил проблему, почти день на это потратил.
Сначала пошел свои путем — с помощью USBASP и Arduino IDE прошил загрузчик.
Тут прочел предыдущее сообщение и поставил APMPlanner2.
С горя залит ArduCopter — и ВАУ: диодик замигал, связь с платой по mavlink установлена, гироскопы работают!
Итого резюм: версия ArduPlane 3.3.0, которая считается сейчас последним стабильным релизом — битая. Зы: Внимательно обследовал свою плату — компас не распаян, флюс не отмыт и вообще качество хреновое. И никакого знака, что она 2.8. Буду с китайца по этому поводу через диспут деньги стрясать.
Администратор отключил публичную отправку сообщений Re: APM 2.8 HELP!!! Здорово, что получилось, я посмотрю вечером какие маркировки есть на моей плате, http://www.ebay.com/itm/Module-GPS-Comp … 566e730d16 или комплект http://www.ebay.com/itm/Side-Pin-ArduPi … 19f17126b2 Смотрите вот здесь оригинальная плата https://store.3drobotics.com/products/a … side-entry а у нас китайские клоны, по цене оригинала китайцы дают еще GPS и телеметрию, так что можно выбирать ( оригинал или больше плюшек) PS я еще читал что есть версия платы от hobbyking и они изменили схему питания из-за этого могут работать не все прошивки, можете копать в этом направлении.
Администратор отключил публичную отправку сообщений Страница:
|
||||||
|






 Аппаратура +
Аппаратура +|
Hello I am trying for hours to get my APM 2.5 connected to the Mission Planner. My PC has all drivers installed and recognized the APM on port COM6. It seems like the connection is good — only Mission Planner doesn’t connect. At the Mission Planner I’ve chosen COM6 with a Baud rate of 115200 like it is stated everywhere. But I can’t get a connection. I am using «Mission Planner 1.2.62 mav 1.0». I would be happy about every advice! Thanks Luc |
|
|
Sign up now to remove ads between posts |
|
Hi, Any luck? Check to see that the rx / tx leds come on near the green led. Check the mini usb connector as mine has failed. Update your MP to the latest. BUT MAINLY Just connect it via usb and then install firmware, do not try to connect it by clicking the button. I had this, took me ages to get it sorted, I was under the impression you could only install firmware once it was ‘software connected’, I was wrong and soon as I uploaded the firmware, all become sweet. Give it a shot, Cheers |
|
|
|
put the port select on auto, then hit connect. It might need to figure it out for itself. |
|
Having the same issues — annoying as anything as it has taken hours. I connected successfully once and it crashed on the Wizard and now cannot connect. Did you ever work this out? |
|
|
|
Quote:
Originally Posted by Aussiehoudini Having the same issues — annoying as anything as it has taken hours. I connected successfully once and it crashed on the Wizard and now cannot connect. When that happened to my first APM it was the 3.3v regulator that had failed partway through compass calibration. |
|
Thanks. After reading more last night I thought this might have to be the problem. I don’t know how it could have happen though. I use XT connectors and can’t believe there was any sparking in connecting it up. I did a from scratch install of everything on another laptop, new cables, everything and no luck. I was fortunate to have another APM to test and lo and behold it worked instantly. I went back to the other laptop and all connected no problems. I have to put it down to the compass calibration step also as that’s where it appeared to fail. Is it easy to repair? |
|
|
I ordered some regulators, I’m attempting the fix myself. My soldering skills are probably below average. I was told by kendall at UAVobjects who I bought the board from that I could take it to a HAM radio shop and they could easily do the soldering for me. Probably a pc repair shop could get it done also. |
|
Click here follow the steps to fix Mission Planner Communication Error No Connection and related errors.
|
|
|
|
To Fix (Mission Planner Communication Error No Connection) error you need to |
|
|
Step 1: |
|
|---|---|
| Download (Mission Planner Communication Error No Connection) Repair Tool |
|
|
Step 2: |
|
| Click the «Scan» button | |
|
Step 3: |
|
| Click ‘Fix All‘ and you’re done! | |
|
Compatibility:
Limitations: |

Mission Planner Communication Error No Connection Error Codes are caused in one way or another by misconfigured system files
in your windows operating system.
If you have Mission Planner Communication Error No Connection errors then we strongly recommend that you
Download (Mission Planner Communication Error No Connection) Repair Tool.
This article contains information that shows you how to fix
Mission Planner Communication Error No Connection
both
(manually) and (automatically) , In addition, this article will help you troubleshoot some common error messages related to Mission Planner Communication Error No Connection error code that you may receive.
Note:
This article was updated on 2023-02-03 and previously published under WIKI_Q210794
Contents
- 1. What is Mission Planner Communication Error No Connection error?
- 2. What causes Mission Planner Communication Error No Connection error?
- 3. How to easily fix Mission Planner Communication Error No Connection errors
What is Mission Planner Communication Error No Connection error?
The Mission Planner Communication Error No Connection error is the Hexadecimal format of the error caused. This is common error code format used by windows and other windows compatible software and driver vendors.
This code is used by the vendor to identify the error caused. This Mission Planner Communication Error No Connection error code has a numeric error number and a technical description. In some cases the error may have more parameters in Mission Planner Communication Error No Connection format .This additional hexadecimal code are the address of the memory locations where the instruction(s) was loaded at the time of the error.
What causes Mission Planner Communication Error No Connection error?
The Mission Planner Communication Error No Connection error may be caused by windows system files damage. The corrupted system files entries can be a real threat to the well being of your computer.
There can be many events which may have resulted in the system files errors. An incomplete installation, an incomplete uninstall, improper deletion of applications or hardware. It can also be caused if your computer is recovered from a virus or adware/spyware
attack or by an improper shutdown of the computer. All the above actives
may result in the deletion or corruption of the entries in the windows
system files. This corrupted system file will lead to the missing and wrongly
linked information and files needed for the proper working of the
application.
How to easily fix Mission Planner Communication Error No Connection error?
There are two (2) ways to fix Mission Planner Communication Error No Connection Error:
Advanced Computer User Solution (manual update):
1) Start your computer and log on as an administrator.
2) Click the Start button then select All Programs, Accessories, System Tools, and then click System Restore.
3) In the new window, select «Restore my computer to an earlier time» option and then click Next.
4) Select the most recent system restore point from the «On this list, click a restore point» list, and then click Next.
5) Click Next on the confirmation window.
6) Restarts the computer when the restoration is finished.
Novice Computer User Solution (completely automated):
1) Download (Mission Planner Communication Error No Connection) repair utility.

2) Install program and click Scan button.
3) Click the Fix Errors button when scan is completed.
4) Restart your computer.
How does it work?
This tool will scan and diagnose, then repairs, your PC with patent
pending technology that fix your windows operating system registry
structure.
basic features: (repairs system freezing and rebooting issues , start-up customization , browser helper object management , program removal management , live updates , windows structure repair.)