Resonance crashes? Game not starting? Bugs in Resonance? Solution to most technical problems.
If Resonance crashes, Resonance will not start, Resonance not installing, there are no controls in Resonance, no sound in game, errors happen in Resonance – we offer you the most common ways to solve these problems.
Be sure to update your graphics card drivers and other software
Before letting out all of your bad feelings toward development team, do not forget to go to the official website of your graphics card manufacturer and download the latest drivers. There are often specially prepared optimized drivers for specific game. You can also try to install a past versions of the driver if the problem is not solved by installing the current version.
It is important to remember that only the final version of the video card driver must be loaded – try not to use the beta version, since they can have some terrible bugs.
Do not also forget that for good game operation you may need to install the latest version DirectX, which can be found and downloaded from official Microsoft website.
Resonance not starting
Many of the problems with games launching happen because of improper installation. Check, if there was any error during installation, try deleting the game and run the installer again, but before install don’t forget to disable antivirus – it may often mistakenly delete files during installation process. It is also important to remember that the path to the folder with a game should contain only Latin characters and numbers.
You also have to check whether there is enough space on the HDD for installation. You can also try to run the game as an administrator in compatibility mode with different versions of Windows.
Resonance crashes. Low FPS. Friezes. Hangs
Your first solution to this problem install new drivers for a video card. This action can drastically rise game FPS. Also, check the CPU and memory utilization in the Task Manager (opened by pressing CTRL + SHIFT + ESCAPE). If before starting the game you can see that some process consumes too many resources — turn off the program or simply remove this process from Task Manager.
Next, go to the graphics settings in the game. First – turn off anti-aliasing and try to lower the setting, responsible for post-processing. Many of them consume a lot of resources and switching them off will greatly enhance the performance, and not greatly affect the quality of the picture.
Resonance crashes to the desktop
If Resonance often crashes to the desktop, try to reduce quality of the graphics. It is possible that your PC just does not have enough performance and the game may not work correctly. Also, it is worth to check out for updates — most of today’s games have the automatic patches installation system on startup if internet connection is available. Check to see whether this option is turned off in the settings and switch it on if necessary.
Black of black screen in the Resonance
The most common issue with black screen is a problem with your GPU. Check to see if your video card meets the minimum requirements and install the latest drivers. Sometimes a black screen is the result of a lack of CPU performance.
If everything is fine with your hardware and it satisfies the minimum requirements, try to switch to another window (ALT + TAB), and then return to the game screen.
Resonance is not installed. Installation hangs
First of all, check that you have enough space on the HDD for installation. Remember that to work properly installer requires the declared volume of space, plus 1-2 GB of additional free space on the system drive. In general, remember this rule – you must always have at least 2 gigabytes of free space on your system drive (usually it’s disk C) for temporary files. Otherwise, the games and the other software may not work correctly or even refuse to start.
Problems with the installation may also be due to the lack of an internet connection or it’s instability. Also, do not forget to stop the antivirus for the time game installation – sometimes it interferes with the correct file copy, or delete files by mistake, mistakenly believing they are viruses.
Saves not working in Resonance
By analogy with the previous solution, check for free space on HDD — both on where the game is installed, and the system drive. Often your saves are stored in a folder of documents, which is separate from the game itself.
Controls not working in Resonance
Sometimes the controls in game do not work because of the simultaneous connection of multiple input devices. Try disabling gamepad, or, if for some reason, you have two connected keyboards or mouses, leave only one pair of devices. If your gamepad does not work, remember — the games usually officially support only native Xbox controllers. If your controller is defined in system differently — try using software that emulates the Xbox gamepad (eg, x360ce — step by step manual can be found here).
No sound in Resonance
Check if the sound works in other programs. Then check to see if the sound is turned off in the settings of the game, and whether there is correct audio playback device selected, which is connected your speakers or headset. After this check volumes in system mixer, it can also be turned off there.
If you are using an external audio card — check for new drivers at the manufacturer’s website.
К сожалению, в играх бывают изъяны: тормоза, низкий FPS, вылеты, зависания, баги и другие мелкие и не очень ошибки. Нередко проблемы начинаются еще до начала игры, когда она не устанавливается, не загружается или даже не скачивается. Да и сам компьютер иногда чудит, и тогда в Resonance вместо картинки черный экран, не работает управление, не слышно звук или что-нибудь еще.
Что сделать в первую очередь
- Скачайте и запустите всемирно известный CCleaner (скачать по прямой ссылке) — это программа, которая очистит ваш компьютер от ненужного мусора, в результате чего система станет работать быстрее после первой же перезагрузки;
- Обновите все драйверы в системе с помощью программы Driver Updater (скачать по прямой ссылке) — она просканирует ваш компьютер и обновит все драйверы до актуальной версии за 5 минут;
- Установите Advanced System Optimizer (скачать по прямой ссылке) и включите в ней игровой режим, который завершит бесполезные фоновые процессы во время запуска игр и повысит производительность в игре.
Системные требования Resonance
Второе, что стоит сделать при возникновении каких-либо проблем с Resonance, это свериться с системными требованиями. По-хорошему делать это нужно еще до покупки, чтобы не пожалеть о потраченных деньгах.
Каждому геймеру следует хотя бы немного разбираться в комплектующих, знать, зачем нужна видеокарта, процессор и другие штуки в системном блоке.

Файлы, драйверы и библиотеки
Практически каждое устройство в компьютере требует набор специального программного обеспечения. Это драйверы, библиотеки и прочие файлы, которые обеспечивают правильную работу компьютера.
Начать стоит с драйверов для видеокарты. Современные графические карты производятся только двумя крупными компаниями — Nvidia и AMD. Выяснив, продукт какой из них крутит кулерами в системном блоке, отправляемся на официальный сайт и загружаем пакет свежих драйверов:
- Скачать драйвер для видеокарты Nvidia GeForce
- Скачать драйвер для видеокарты AMD Radeon

Обязательным условием для успешного функционирования Resonance является наличие самых свежих драйверов для всех устройств в системе. Скачайте утилиту Driver Updater, чтобы легко и быстро загрузить последние версии драйверов и установить их одним щелчком мыши:
- загрузите Driver Updater и запустите программу;
- произведите сканирование системы (обычно оно занимает не более пяти минут);
- обновите устаревшие драйверы одним щелчком мыши.

Фоновые процессы всегда влияют на производительность. Вы можете существенно увеличить FPS, очистив ваш ПК от мусорных файлов и включив специальный игровой режим с помощью программы Advanced System Optimizer
- загрузите Advanced System Optimizer и запустите программу;
- произведите сканирование системы (обычно оно занимает не более пяти минут);
- выполните все требуемые действия. Ваша система работает как новая!
Когда с драйверами закончено, можно заняться установкой актуальных библиотек — DirectX и .NET Framework. Они так или иначе используются практически во всех современных играх:
- Скачать DirectX
- Скачать Microsoft .NET Framework 3.5
- Скачать Microsoft .NET Framework 4
Еще одна важная штука — это библиотеки расширения Visual C++, которые также требуются для работы Resonance. Ссылок много, так что мы решили сделать отдельный список для них:
- Скачать Microsoft Visual C++ 2005 Service Pack 1
- Скачать Microsoft Visual C++ 2008 (32-бит) (Скачать Service Pack 1)
- Скачать Microsoft Visual C++ 2008 (64-бит) (Скачать Service Pack 1)
- Скачать Microsoft Visual C++ 2010 (32-бит) (Скачать Service Pack 1)
- Скачать Microsoft Visual C++ 2010 (64-бит) (Скачать Service Pack 1)
- Скачать Microsoft Visual C++ 2012 Update 4
- Скачать Microsoft Visual C++ 2013
Если вы дошли до этого места — поздравляем! Наиболее скучная и рутинная часть подготовки компьютера к геймингу завершена. Дальше мы рассмотрим типовые проблемы, возникающие в играх, а также кратко наметим пути их решения.

Resonance не скачивается. Долгое скачивание. Решение
Скорость лично вашего интернет-канала не является единственно определяющей скорость загрузки. Если раздающий сервер работает на скорости, скажем, 5 Мб в секунду, то ваши 100 Мб делу не помогут.
Если Resonance совсем не скачивается, то это может происходить сразу по куче причин: неправильно настроен роутер, проблемы на стороне провайдера, кот погрыз кабель или, в конце-концов, упавший сервер на стороне сервиса, откуда скачивается игра.

Resonance не устанавливается. Прекращена установка. Решение
Перед тем, как начать установку Resonance, нужно еще раз обязательно проверить, какой объем она занимает на диске. Если же проблема с наличием свободного места на диске исключена, то следует провести диагностику диска. Возможно, в нем уже накопилось много «битых» секторов, и он банально неисправен?
В Windows есть стандартные средства проверки состояния HDD- и SSD-накопителей, но лучше всего воспользоваться специализированными программами.
Но нельзя также исключать и вероятность того, что из-за обрыва соединения загрузка прошла неудачно, такое тоже бывает. А если устанавливаете Resonance с диска, то стоит поглядеть, нет ли на носителе царапин и чужеродных веществ!

Resonance не запускается. Ошибка при запуске. Решение
Resonance установилась, но попросту отказывается работать. Как быть?
Выдает ли Resonance какую-нибудь ошибку после вылета? Если да, то какой у нее текст? Возможно, она не поддерживает вашу видеокарту или какое-то другое оборудование? Или ей не хватает оперативной памяти?
Помните, что разработчики сами заинтересованы в том, чтобы встроить в игры систему описания ошибки при сбое. Им это нужно, чтобы понять, почему их проект не запускается при тестировании.
Обязательно запишите текст ошибки. Если вы не владеете иностранным языком, то обратитесь на официальный форум разработчиков Resonance. Также будет полезно заглянуть в крупные игровые сообщества и, конечно, в наш FAQ.
Если Resonance не запускается, мы рекомендуем вам попробовать отключить ваш антивирус или поставить игру в исключения антивируса, а также еще раз проверить соответствие системным требованиям и если что-то из вашей сборки не соответствует, то по возможности улучшить свой ПК, докупив более мощные комплектующие.

В Resonance черный экран, белый экран, цветной экран. Решение
Проблемы с экранами разных цветов можно условно разделить на 2 категории.
Во-первых, они часто связаны с использованием сразу двух видеокарт. Например, если ваша материнская плата имеет встроенную видеокарту, но играете вы на дискретной, то Resonance может в первый раз запускаться на встроенной, при этом самой игры вы не увидите, ведь монитор подключен к дискретной видеокарте.
Во-вторых, цветные экраны бывают при проблемах с выводом изображения на экран. Это может происходить по разным причинам. Например, Resonance не может наладить работу через устаревший драйвер или не поддерживает видеокарту. Также черный/белый экран может выводиться при работе на разрешениях, которые не поддерживаются игрой.

Resonance вылетает. В определенный или случайный момент. Решение
Играете вы себе, играете и тут — бац! — все гаснет, и вот уже перед вами рабочий стол без какого-либо намека на игру. Почему так происходит? Для решения проблемы стоит попробовать разобраться, какой характер имеет проблема.
Если вылет происходит в случайный момент времени без какой-то закономерности, то с вероятностью в 99% можно сказать, что это ошибка самой игры. В таком случае исправить что-то очень трудно, и лучше всего просто отложить Resonance в сторону и дождаться патча.
Однако если вы точно знаете, в какие моменты происходит вылет, то можно и продолжить игру, избегая ситуаций, которые провоцируют сбой.
Однако если вы точно знаете, в какие моменты происходит вылет, то можно и продолжить игру, избегая ситуаций, которые провоцируют сбой. Кроме того, можно скачать сохранение Resonance в нашем файловом архиве и обойти место вылета.

Resonance зависает. Картинка застывает. Решение
Ситуация примерно такая же, как и с вылетами: многие зависания напрямую связаны с самой игрой, а вернее с ошибкой разработчика при ее создании. Впрочем, нередко застывшая картинка может стать отправной точкой для расследования плачевного состояния видеокарты или процессора.Так что если картинка в Resonance застывает, то воспользуйтесь программами для вывода статистики по загрузке комплектующих. Быть может, ваша видеокарта уже давно исчерпала свой рабочий ресурс или процессор греется до опасных температур?Проверить загрузку и температуры для видеокарты и процессоров проще всего в программе MSI Afterburner. При желании можно даже выводить эти и многие другие параметры поверх картинки Resonance.Какие температуры опасны? Процессоры и видеокарты имеют разные рабочие температуры. У видеокарт они обычно составляют 60-80 градусов по Цельсию. У процессоров немного ниже — 40-70 градусов. Если температура процессора выше, то следует проверить состояние термопасты. Возможно, она уже высохла и требует замены.Если греется видеокарта, то стоит воспользоваться драйвером или официальной утилитой от производителя. Нужно увеличить количество оборотов кулеров и проверить, снизится ли рабочая температура.

Resonance тормозит. Низкий FPS. Просадки частоты кадров. Решение
При тормозах и низкой частоте кадров в Resonance первым делом стоит снизить настройки графики. Разумеется, их много, поэтому прежде чем снижать все подряд, стоит узнать, как именно те или иные настройки влияют на производительность.Разрешение экрана. Если кратко, то это количество точек, из которого складывается картинка игры. Чем больше разрешение, тем выше нагрузка на видеокарту. Впрочем, повышение нагрузки незначительное, поэтому снижать разрешение экрана следует только в самую последнюю очередь, когда все остальное уже не помогает.Качество текстур. Как правило, этот параметр определяет разрешение файлов текстур. Снизить качество текстур следует в случае если видеокарта обладает небольшим запасом видеопамяти (меньше 4 ГБ) или если используется очень старый жесткий диск, скорость оборотов шпинделя у которого меньше 7200.Качество моделей (иногда просто детализация). Эта настройка определяет, какой набор 3D-моделей будет использоваться в игре. Чем выше качество, тем больше полигонов. Соответственно, высокополигональные модели требуют большей вычислительной мощности видекарты (не путать с объемом видеопамяти!), а значит снижать этот параметр следует на видеокартах с низкой частотой ядра или памяти.Тени. Бывают реализованы по-разному. В одних играх тени создаются динамически, то есть они просчитываются в реальном времени в каждую секунду игры. Такие динамические тени загружают и процессор, и видеокарту. В целях оптимизации разработчики часто отказываются от полноценного рендера и добавляют в игру пре-рендер теней. Они статичные, потому как по сути это просто текстуры, накладывающиеся поверх основных текстур, а значит загружают они память, а не ядро видеокарты.Нередко разработчики добавляют дополнительные настройки, связанные с тенями:
- Разрешение теней — определяет, насколько детальной будет тень, отбрасываемая объектом. Если в игре динамические тени, то загружает ядро видеокарты, а если используется заранее созданный рендер, то «ест» видеопамять.
- Мягкие тени — сглаживание неровностей на самих тенях, обычно эта опция дается вместе с динамическими тенями. Вне зависимости от типа теней нагружает видеокарту в реальном времени.
Сглаживание. Позволяет избавиться от некрасивых углов на краях объектов за счет использования специального алгоритма, суть которого обычно сводится к тому, чтобы генерировать сразу несколько изображений и сопоставлять их, высчитывая наиболее «гладкую» картинку. Существует много разных алгоритмов сглаживания, которые отличаются по уровню влияния на быстродействие Resonance.Например, MSAA работает «в лоб», создавая сразу 2, 4 или 8 рендеров, поэтому частота кадров снижается соответственно в 2, 4 или 8 раз. Такие алгоритмы как FXAA и TAA действуют немного иначе, добиваясь сглаженной картинки путем высчитывания исключительно краев и с помощью некоторых других ухищрений. Благодаря этому они не так сильно снижают производительность.Освещение. Как и в случае со сглаживанием, существуют разные алгоритмы эффектов освещения: SSAO, HBAO, HDAO. Все они используют ресурсы видеокарты, но делают это по-разному в зависимости от самой видеокарты. Дело в том, что алгоритм HBAO продвигался в основном на видеокартах от Nvidia (линейка GeForce), поэтому лучше всего работает именно на «зеленых». HDAO же, наоборот, оптимизирован под видеокарты от AMD. SSAO — это наиболее простой тип освещения, он потребляет меньше всего ресурсов, поэтому в случае тормозов в Resonance стоит переключиться него.Что снижать в первую очередь? Как правило, наибольшую нагрузку вызывают тени, сглаживание и эффекты освещения, так что лучше начать именно с них.Часто геймерам самим приходится заниматься оптимизацией Resonance. Практически по всем крупным релизам есть различные соответствующие и форумы, где пользователи делятся своими способами повышения производительности.
Один из них — специальная программа под названием Advanced System Optimizer. Она сделана специально для тех, кто не хочет вручную вычищать компьютер от разных временных файлов, удалять ненужные записи реестра и редактировать список автозагрузки. Advanced System Optimizer сама сделает это, а также проанализирует компьютер, чтобы выявить, как можно улучшить производительность в приложениях и играх.
Скачать Advanced System Optimizer

Resonance лагает. Большая задержка при игре. Решение
Многие путают «тормоза» с «лагами», но эти проблемы имеют совершенно разные причины. Resonance тормозит, когда снижается частота кадров, с которой картинка выводится на монитор, и лагает, когда задержка при обращении к серверу или любому другому хосту слишком высокая.
Именно поэтому «лаги» могут быть только в сетевых играх. Причины разные: плохой сетевой код, физическая удаленность от серверов, загруженность сети, неправильно настроенный роутер, низкая скорость интернет-соединения.
Впрочем, последнее бывает реже всего. В онлайн-играх общение клиента и сервера происходит путем обмена относительно короткими сообщениями, поэтому даже 10 Мб в секунду должно хватить за глаза.

В Resonance нет звука. Ничего не слышно. Решение
Resonance работает, но почему-то не звучит — это еще одна проблема, с которой сталкиваются геймеры. Конечно, можно играть и так, но все-таки лучше разобраться, в чем дело.
Сначала нужно определить масштаб проблемы. Где именно нет звука — только в игре или вообще на компьютере? Если только в игре, то, возможно, это обусловлено тем, что звуковая карта очень старая и не поддерживает DirectX.
Если же звука нет вообще, то дело однозначно в настройке компьютера. Возможно, неправильно установлены драйвера звуковой карты, а может быть звука нет из-за какой-то специфической ошибки нашей любимой ОС Windows.

В Resonance не работает управление. Resonance не видит мышь, клавиатуру или геймпад. Решение
Как играть, если невозможно управлять процессом? Проблемы поддержки специфических устройств тут неуместны, ведь речь идет о привычных девайсах — клавиатуре, мыши и контроллере.Таким образом, ошибки в самой игре практически исключены, почти всегда проблема на стороне пользователя. Решить ее можно по-разному, но, так или иначе, придется обращаться к драйверу. Обычно при подключении нового устройства операционная система сразу же пытается задействовать один из стандартных драйверов, но некоторые модели клавиатур, мышей и геймпадов несовместимы с ними.Таким образом, нужно узнать точную модель устройства и постараться найти именно ее драйвер. Часто с устройствами от известных геймерских брендов идут собственные комплекты ПО, так как стандартный драйвер Windows банально не может обеспечить правильную работу всех функций того или иного устройства.Если искать драйверы для всех устройств по отдельности не хочется, то можно воспользоваться программой Driver Updater. Она предназначена для автоматического поиска драйверов, так что нужно будет только дождаться результатов сканирования и загрузить нужные драйвера в интерфейсе программы.Нередко тормоза в Resonance могут быть вызваны вирусами. В таком случае нет разницы, насколько мощная видеокарта стоит в системном блоке. Проверить компьютер и отчистить его от вирусов и другого нежелательного ПО можно с помощью специальных программ. Например NOD32. Антивирус зарекомендовал себя с наилучшей стороны и получили одобрение миллионов пользователей по всему миру. ZoneAlarm подходит как для личного использования, так и для малого бизнеса, способен защитить компьютер с операционной системой Windows 10, Windows 8, Windows 7, Windows Vista и Windows XP от любых атак: фишинговых, вирусов, вредоносных программ, шпионских программ и других кибер угроз. Новым пользователям предоставляется 30-дневный бесплатный период.Nod32 — анитивирус от компании ESET, которая была удостоена многих наград за вклад в развитие безопасности. На сайте разработчика доступны версии анивирусных программ как для ПК, так и для мобильных устройств, предоставляется 30-дневная пробная версия. Есть специальные условия для бизнеса.

Resonance, скачанная с торрента не работает. Решение
Если дистрибутив игры был загружен через торрент, то никаких гарантий работы быть в принципе не может. Торренты и репаки практически никогда не обновляются через официальные приложения и не работают по сети, потому что по ходу взлома хакеры вырезают из игр все сетевые функции, которые часто используются для проверки лицензии.
Такие версии игр использовать не просто неудобно, а даже опасно, ведь очень часто в них изменены многие файлы. Например, для обхода защиты пираты модифицируют EXE-файл. При этом никто не знает, что они еще с ним делают. Быть может, они встраивают само-исполняющееся программное обеспечение. Например, майнер, который при первом запуске игры встроится в систему и будет использовать ее ресурсы для обеспечения благосостояния хакеров. Или вирус, дающий доступ к компьютеру третьим лицам. Тут никаких гарантий нет и быть не может.К тому же использование пиратских версий — это, по мнению нашего издания, воровство. Разработчики потратили много времени на создание игры, вкладывали свои собственные средства в надежде на то, что их детище окупится. А каждый труд должен быть оплачен.Поэтому при возникновении каких-либо проблем с играми, скачанными с торрентов или же взломанных с помощью тех или иных средств, следует сразу же удалить «пиратку», почистить компьютер при помощи антивируса и приобрести лицензионную копию игры. Это не только убережет от сомнительного ПО, но и позволит скачивать обновления для игры и получать официальную поддержку от ее создателей.

Resonance выдает ошибку об отсутствии DLL-файла. Решение
Как правило, проблемы, связанные с отсутствием DLL-библиотек, возникают при запуске Resonance, однако иногда игра может обращаться к определенным DLL в процессе и, не найдя их, вылетать самым наглым образом.
Чтобы исправить эту ошибку, нужно найти необходимую библиотеку DLL и установить ее в систему. Проще всего сделать это с помощью программы DLL-fixer, которая сканирует систему и помогает быстро найти недостающие библиотеки.
Если ваша проблема оказалась более специфической или же способ, изложенный в данной статье, не помог, то вы можете спросить у других пользователей в нашей рубрике «Вопросы и ответы». Они оперативно помогут вам!
Благодарим за внимание!
Introduction
Quantum technologies that utilise quantum states, such as quantum computing1,2,3 and metrology4,5,6, require precise control of the states. However, the quantum systems that we are attempting to control basically experience unavoidable environmental noise and systematic errors caused by experimental apparatuses. They prevent us from precise control of quantum states.
To suppress the effects of systematic errors, a composite pulse (CP) has been investigated7,8,9 particularly in the field of nuclear magnetic resonance (NMR), which can be utilised to implement toy quantum computers10,11,12. In CPs, a single operation is replaced by a sequence of operations, and the error in each operation cancels each other up to a certain order with respect to the error magnitude. In this paper, we focus on first-order CPs, which compensate for first-order effects of error magnitude. The effectiveness of CPs has been exhibited in NMR13, ion traps14, and superconducting circuits15.
In NMR, two types of errors, Pulse Length Error (PLE) and Off Resonance Error (ORE), in one-qubit operations have been intensively studied. If we adopt the Bloch sphere representation, in which a state of a qubit is represented by a point in a three-dimensional sphere (Bloch sphere) while an operation by a rotation, PLE corresponds to the error of the rotational angle of an operation, and ORE corresponds to the error of the rotation axis. Many CPs that are robust against PLE, such as BB116, SCROFULOUS17 and SK118, have been found. Similarly, we have many construction methods for CPs that are robust against ORE8,19,20,21,22,23. When we perform a specific target operation, such as (pi)— and (pi /2)-rotations in the Bloch sphere representation, these methods work well and can provide simple and explicit formulae for determining ORE robust operations. The CORPSE family is one of the simplest and most tractable ORE robust CPs for implementing an arbitrary (theta)-rotation24; all of its parameters are explicitly determined as a simple function of the parameters of the target operation. This family is often used when ORE robust arbitrary (theta)-rotations are required25,26,27,28.
Recently, it was revealed that PLE robust CPs have a geometric property related to the concept of the geometric quantum gates29. Additionally, a geometric meaning of robustness against any type of noise is discussed in Ref.30; however, it is associated with the geometry of Lie algebras and abstract. A concrete geometric property of ORE robust CPs has not yet been addressed.
In this study, we investigated a geometric property of ORE robust CPs via geometry on the Bloch sphere. We obtained the relation between the ORE robustness of a CP and its trajectory. This geometric property will provide a deeper understanding of the ORE robustness and increase its tractability. Further, we illustrated this property using two ORE robust CPs, CORPSE and another CP, which we have newly invented. For some simple cases, this property will help us to obtain new ORE robust CPs intuitively.
The remainder of this paper is organised as follows. We briefly review basic concepts of CPs in “Review of composite pulses”. In “Geometric property of ORE robust CP”, we explain our result on the geometric property of ORE robust gates. “Two examples of ORE robust composite pulses” introduces two ORE robust CPs, CORPSE and our proposed CP, and we examine how the geometric picture of ORE robust CPs works. “Conclusions and discussions” presents the conclusions and discussions. We use the natural unit (hbar =1) throughout the paper.
Review of composite pulses
General framework
Here, we introduce a general theory of CPs, which is applicable to any quantum systems although we will focus on two-level systems from the next subsection. The Schrödinger equation with a time-dependent Hamiltonian H(t) is
$$begin{aligned} frac{d}{d t}|Psi (t)rangle = — i H(t) |Psi (t)rangle . end{aligned}$$
(1)
The formal solution from (t=0) to (t=T) in the Schrödinger picture is given by
$$begin{aligned} |Psi (T)rangle = mathcal{T}exp Bigl (- i int ^{T}_{0} d t H(t)Bigr ) |Psi (0)rangle , end{aligned}$$
(2)
where we introduce the symbol of the time-ordered product:
$$begin{aligned} mathcal{T}(A(t_{1})B(t_{2}))= {left{ begin{array}{ll} A(t_{1})B(t_{2})quad t_{1}>t_{2},\ B(t_{2})A(t_{1})quad t_{2}>t_{1}. end{array}right. } end{aligned}$$
(3)
Its extension to cases of multiple operators is trivial. If the Hamiltonian is piecewise constant, the time-ordered exponential can also be rewritten as
$$begin{aligned} mathcal{T}exp Bigl (-i int ^{T}_{0} d t H(t)Bigr )=exp bigl (-i (t_{k}-t_{k-1}) H_{k}bigr )exp bigl (-i (t_{k-1}-t_{k-2}) H_{k-1}bigr ){cdotcdotcdot} exp bigl (-i (t_{1}-t_{0}) H_{1}bigr ), end{aligned}$$
(4)
where we set (t_{0}=0) and (t_{k}=T) and the Hamiltonian is
$$begin{aligned} H(t)=H_{i},~t_{i-1} le t < t_{i},~(i=1 sim k). end{aligned}$$
(5)
k is the number of periods in which the Hamiltonian is constant. We refer to an operation during the Hamiltonian is constant as an elementary operation. Then, k represents the number of elementary operations.
Let us assume that the Hamiltonian is decomposed into two parts:
$$begin{aligned} H(t)=H_{0}(t)+ H_{mathrm{err}}(t). end{aligned}$$
(6)
The part (H_{0}(t)) represents the ideal Hamiltonian, whose corresponding dynamics (U_{0}(T,0):=mathcal{T}exp (-i int ^{T}_{0}d t H_{0}(t))) will be implemented herein. We can control this part of the Hamiltonian. Meanwhile, (H_{mathrm{err}}(t)) describes the effect of undesired systematic errors during the operation. The magnitude of (H_{mathrm{err}}(t)) is assumed to be sufficiently small compared to that of (H_{0}(t)) for the entire time region. (Mathematically, all the matrix components of (H_{mathrm{err}}(t)) are small compared to that of (H_{0}(t)).) Either part (H_{0}(t)) or (H_{mathrm{err}}(t)) can have (piecewise) time dependence. We define the state in the interaction picture with respect to (H_{0}(t)) as
$$begin{aligned} |Psi _{I}(t)rangle := Bigl ( mathcal{T}exp Bigl (- i int ^{t}_{0} d t’ H_{0}(t’)Bigr ) Bigr )^{dagger }|Psi (t) rangle =U^{dagger }_{0}(t,0)|Psi (t)rangle , end{aligned}$$
(7)
where (|Psi (t)rangle) is a solution to the Schrödinger equation (1). The state (|Psi _{I}(t)rangle) satisfies the following equation:
$$begin{aligned} frac{d}{d t}|Psi _{I}(t)rangle =- i {tilde{H}}_{mathrm{err}}(t)|Psi _{I}(t)rangle , end{aligned}$$
(8)
where ({tilde{H}}_{mathrm{err}}(t):=U^{dagger }_{0}(t,0)H_{mathrm{err}}(t)U_{0}(t,0)). A formal solution of Eq. (8) is
$$begin{aligned} |Psi _{I}(T)rangle ={tilde{U}}_{mathrm{err}}(T,0)|Psi _{I}(0)rangle := mathcal{T}exp Bigl (- i int ^{T}_{0} d t {tilde{H}}_{mathrm{err}}(t)Bigr ) |Psi _{I}(0)rangle . end{aligned}$$
(9)
By comparing the above Eq. (9) and the definition of the interaction picture (7), the solution of the Schrödinger equation with the Hamiltonian (6) is written as
$$begin{aligned} |Psi (T)rangle =U_{0}(T,0)|Psi _{I}(T)rangle =U_{0}(T,0){tilde{U}}_{mathrm{err}}(T,0)|Psi (0)rangle . end{aligned}$$
(10)
We intend to implement the ideal unitary operation (U_{0}(T,0)) as accurately as possible under the effect of the error term (H_{mathrm{err}}). As the magnitude of (H_{mathrm{err}}) is assumed to be small enough, we can ignore its higher-order terms in ({tilde{U}}_{mathrm{err}}(T,0)), and then
$$begin{aligned} {tilde{U}}_{mathrm{err}}(T,0) sim Bigl (1- i int ^{T}_{0} d t {tilde{H}}_{mathrm{err}}(t)Bigr ). end{aligned}$$
(11)
When the condition
$$begin{aligned} int ^{T}_{0} d t {tilde{H}}_{mathrm{err}}(t)=0. end{aligned}$$
(12)
is satisfied, the operation (10) equals the ideal operation (U_{0}(T,0)) for any initial state (|Psi (0)rangle) up to the first order with respect to ({tilde{H}}_{mathrm{err}}(t)). If better accuracy is required, we obtain more conditions from higher-order terms. Note that to implement a unitary evolution U as the target operation, there are many choices of (H_{0}(t)) that satisfy (U=U_{0}(T,0)). If we know the error model (H_{mathrm{err}}(t)), we can take (H_{0}(t)) to satisfy (U=U_{0}(T,0)) and Eq. (12) using the degrees of freedom of this choice of (H_{0}(t)). Thus, the operation caused by such a Hamiltonian (H_{0}(t)) traces the unitary operation U in a robust manner against the specific error model (H_{mathrm{err}}(t)). This is called a CP, one of several methods compensating for the effect of specific errors, such as adiabatic pulses, shortcuts to adiabaticity, and optimal control.
Qubit control
The most fundamental quantum system in quantum information processing is a two-level system, called a qubit. Hereinafter, we focus on the control of one qubit. The control Hamiltonian of a qubit is given as
$$begin{aligned} H_{0}(t)= omega (t)vec {n}(t)cdot frac{vec {sigma }}{2}:= omega (t)(n_{x}(t)frac{sigma _{x}}{2}+n_{y}(t)frac{sigma _{y}}{2}+n_{z}(t)frac{sigma _{z}}{2}), end{aligned}$$
(13)
where the vector (vec {n}(t)=(n_{x},n_{y},n_{z})) is a time-dependent unit vector, and (vec {sigma }:=(sigma _{x},sigma _{y},sigma _{z})) are the Pauli matrices:
$$begin{aligned} sigma _{x}= begin{pmatrix} 0&{}1\ 1&{}0 end{pmatrix} ,~ sigma _{y}= begin{pmatrix} 0&{}-i\ i&{}0 end{pmatrix} ,~ sigma _{z}= begin{pmatrix} 1&{}0\ 0&{}-1 end{pmatrix} . end{aligned}$$
(14)
We implement an arbitrary control of a qubit by adjusting (omega (t)) and (vec {n}(t)). The time dependence of these controllable parameters is often piecewise constant, as shown in Eq. (5), which corresponds to a sequence of pulses. Note that any state of a qubit can be mapped to a point on a sphere (called the Bloch sphere). In this representation, we map the eigenvectors of (sigma _{z}), (|uparrow rangle :=(1,0)^{t}) and (|downarrow rangle :=(0,1)^{t}) to the north pole (vec {z}=(0,0,1)^{t}) and the south pole (-vec {z}=(0,0,-1)^{t}) on the Bloch sphere, respectively. The superscript t means the matrix transposition. Accordingly, the operation of the qubit by the Hamiltonian (13) with constant (omega) and (vec {n}) corresponds to the rotation with the rotation angle (theta :=omega tau) and the axis (vec {n}), where (tau) is a period during which (omega) and (vec {n}) are applied. Hereinafter, we consider the case where the Hamiltonian is piecewise constant.
When we consider the control of one qubit, there are two types of systematic errors: PLE and ORE.
PLE case
PLE is described by the change in (omega (t)) in the control Hamiltonian, (omega (t) rightarrow omega (t)(1+epsilon )), where (epsilon) is a small parameter representing the magnitude of PLE. We should comment that the name of PLE might not be appropriate. This error has two origins: imperfection of the pulse (control field) amplitude and pulse duration. Because pulse duration has less imperfection in NMR, the error in the amplitude is the dominant origin of PLE. As the name of pulse length error rather sounds to be caused by the pulse duration error, we may be ought to call it pulse amplitude error. However, in this paper, we call this error PLE following the fashion in NMR.
The control Hamiltonian (H_{0}(t)) and the error Hamiltonian (H_{mathrm{err}}(t)) are given by
$$begin{aligned} H_{0}(t)=omega _{i}vec {n}_{i}cdot vec {sigma }/2,quad H_{mathrm{err}}(t)=epsilon omega _{i}vec {n}_{i}cdot vec {sigma }/2,quad t_{i-1}<t<t_{i}. end{aligned}$$
(15)
Here, we assume that (epsilon) is constant at (0<t<T) because it represents a systematic error. In this case, (U_{0}(t,0)) and ({tilde{H}}_{mathrm{err}}) are given as
$$begin{aligned} U_{0}(t,0)=&e^{-iomega _{i}(t-t_{i-1})vec {n}_{i}cdot vec {sigma }/2} V_{i-1} {cdotcdotcdot} V_{0},quad t_{i-1}<t<t_{i},nonumber \ {tilde{H}}_{mathrm{err}}(t)=&U^{dagger }_{0}(t,0)(epsilon omega _{i}vec {n}_{i}cdot vec {sigma }/2)U_{0}(t,0)=epsilon omega _{i} V^{dagger }_{0}{cdotcdotcdot} V^{dagger }_{i-1} (vec {n}_{i}cdot vec {sigma }/2)V_{i-1}{cdotcdotcdot} V_{0},quad t_{i-1}<t<t_{i}, end{aligned}$$
(16)
where (V_{i}) denotes (exp (-i theta _{i}vec {n}_{i}cdot vec {sigma }/2)) while (V_{0}) is the identity matrix and (theta _{i}:=omega _{i}(t_{i}-t_{i-1})). (V_{0}) is inserted in the last line just for ensuring the consistency with the range of (i=1sim k). The condition of error robustness (12) for PLE is
$$begin{aligned} int ^{T}_{0} d t {tilde{H}}_{mathrm{err}}(t)=&bigg ( int ^{t_{1}}_{0}d t+int ^{t_{2}}_{t_{1}}d t {cdotcdotcdot} +int ^{T}_{t_{k-1}}d tbiggr ){tilde{H}}_{mathrm{err}}(t)nonumber \ =&epsilon int ^{t_{1}}_{0} d t (omega _{1}vec {n}_{1}cdot vec {sigma })+epsilon int ^{t_{2}}_{t_{1}} d t V^{dagger }_{1}(omega _{2}vec {n}_{2}cdot vec {sigma })V_{1}+{cdotcdotcdot} +epsilon int ^{T}_{t_{k-1}} d t V^{dagger }_{1}{cdotcdotcdot} V_{k-1}(omega _{k}vec {n}_{k}cdot vec {sigma }/2)V_{k-1}{cdotcdotcdot} V_{1}nonumber \ =&epsilon omega _{1}t_{1}(vec {n}_{1}cdot vec {sigma }/2)+ epsilon omega _{2}(t_{2}-t_{1})V^{dagger }_{1} (vec {n}_{2}cdot vec {sigma }/2) V_{1}+{cdotcdotcdot} + epsilon omega _{k} (T-t_{k-1}) V^{dagger }_{1}{cdotcdotcdot} V^{dagger }_{k-1} (vec {n}_{k}cdot vec {sigma }/2)V_{k-1}{cdotcdotcdot} V_{1} nonumber \ =&epsilon sum ^{k}_{i=1}V^{dagger }_{0}{cdotcdotcdot} V^{dagger }_{i-1} (theta _{i}vec {n}_{i}cdot vec {sigma }/2) V_{i-1}{cdotcdotcdot} {cdotcdotcdot} V_{0}=0. nonumber \ end{aligned}$$
(17)
In Ref.29, it was shown that Eq. (17) means a vanishing total dynamic phase, and then it leads to a geometric quantum gate31,32,33 based on the concept of holonomy34,35,36,37. Many PLE robust CPs, such as BB116, SCROFULOUS17, and SK118, have been found to date.
ORE case
ORE is typically caused by the miscalibration of the resonance frequency of a qubit. When the quantisation axis is the z-axis of the Bloch sphere, the (piecewise constant) control Hamiltonian (H_{0}(t)) and the error Hamiltonian (H_{mathrm{err}}(t)) are given by
$$begin{aligned} H_{0}(t)=omega _{i}vec {n}_{i}cdot vec {sigma }/2,quad H_{mathrm{err}}(t)=f frac{sigma _{z}}{2},quad t_{i-1}<t<t_{i}. end{aligned}$$
(18)
where f is a small parameter corresponding to ORE magnitude. Note that the error term for ORE is time independent. The error Hamiltonian in the interaction picture is
$$begin{aligned} {tilde{H}}_{mathrm{err}}(t)= V^{dagger }_{0}{cdotcdotcdot} V^{dagger }_{i-1}e^{i omega _{i}(t-t_{i-1})vec {n}_{i}cdot vec {sigma }/2}bigg (ffrac{sigma _{z}}{2}bigg )e^{-iomega _{i} (t-t_{i-1})vec {n}_{i}cdot vec {sigma }/2}V_{i-1}{cdotcdotcdot} V_{0},quad t_{i-1}<t<t_{i}, end{aligned}$$
(19)
where we use the same definition of (V_{i}) as Eq. (16). Note that (e^{-i omega _{i}(t-t_{i-1})vec {n}_{i}cdot vec {sigma }/2}) does not commute with (H_{mathrm{err}}(t)) ((sigma _{z}) in this case) unlike the case of PLE. Then the condition (12) is calculated as
$$begin{aligned} int ^{T}_{0} d t {tilde{H}}_{mathrm{err}}(t)&=fint ^{t_{1}}_{0} d t e^{i omega _{1}t vec {n}_{1}cdot vec {sigma }/2 } frac{sigma _{z}}{2} e^{-i omega _{1}t vec {n}_{1}cdot vec {sigma }/2 } nonumber \&quad + fint ^{t_{2}}_{t_{1}} d t V^{dagger }_{1}e^{i omega _{2}(t-t_{1}) vec {n}_{2}cdot vec {sigma }/2 } frac{sigma _{z}}{2} e^{-i omega _{2} (t-t_{1}) vec {n}_{2}cdot vec {sigma }/2}V_{1}+{cdotcdotcdot} nonumber \&quad +fint ^{T}_{t_{k-1}} d t V^{dagger }_{1}{cdotcdotcdot} V^{dagger }_{k-1} e^{i omega _{k}(t-t_{k-1}) vec {n}_{k}cdot vec {sigma }/2} frac{sigma _{z}}{2} e^{-i omega _{k}(t-t_{k-1}) vec {n}_{k}cdot vec {sigma }/2}V_{k-1}{cdotcdotcdot} V_{1}nonumber \&=fsum ^{k}_{i=1}V^{dagger }_{0}{cdotcdotcdot} V^{dagger }_{i-1} Bigl (int ^{t_{i}}_{t_{i-1}} d t e^{i omega _{i} (t-t_{i-1}) vec {n}_{1}cdot vec {sigma }/2 }frac{sigma _{z}}{2}e^{-i omega _{i}(t-t_{i-1}) vec {n}_{1}cdot vec {sigma }/2 }Bigr ) V_{i-1}{cdotcdotcdot} V_{0}=0. end{aligned}$$
(20)
This ORE robustness condition seems to be more complicated than that of PLE (17). However, in this study, we show that this condition has a simple geometric understanding via geometry on the Bloch sphere.
CORPSE, which was proposed in Ref.24, is a well known ORE robust CP. This CP can perform an arbitrary (theta) rotation in an ORE robust manner with considerably simple operations. Each parameter in the CORPSE sequence is explicitly determined as a function of the parameters of the target operation.
Geometric property of ORE robust CP
General case
Here, we explain a geometric property of Eq. (20). First, note that for any 3-dimensional unit vector (vec {n}) and (vec {m}),
$$begin{aligned} e^{-i theta vec {m}cdot vec {sigma }/2} (vec {n}cdot vec {sigma }) e^{i theta vec {m}cdot vec {sigma }/2}=bigl ({{varvec{R}}}(theta ,vec {m})vec {n} bigr )cdot vec {sigma }, end{aligned}$$
(21)
where ({{varvec{R}}}(theta ,vec {m})) is a (3 times 3) rotation matrix with rotational axis (vec {m}) and angle (theta). Using this equality, the right hand side of Eq. (20) can be rewritten as
$$begin{aligned} & fsum ^{k}_{i=1}V^{dagger }_{0}{cdotcdotcdot} V^{dagger }_{i-1} Bigl (int ^{t_{i}}_{t_{i-1}} d t e^{i omega _{i}(t-t_{i-1}) vec {n}_{1}cdot vec {sigma }/2 }frac{sigma _{z}}{2}e^{-i omega _{i}(t-t_{i-1}) vec {n}_{1}cdot vec {sigma }/2 }Bigr ) V_{i-1}{cdotcdotcdot} V_{0}nonumber \&quad =fsum ^{k}_{i=1}V^{dagger }_{0}{cdotcdotcdot} V^{dagger }_{i-1} Bigl (int ^{t_{i}}_{t_{i-1}} d t e^{i omega _{i}(t-t_{i-1}) vec {n}_{1}cdot vec {sigma }/2 } (vec {z} cdot frac{vec {sigma }}{2}) e^{-i omega _{i}(t-t_{i-1}) vec {n}_{1}cdot vec {sigma }/2 }Bigr ) V_{i-1}{cdotcdotcdot} V_{0}nonumber \&quad =fBiggl (sum ^{k}_{i=1} {{varvec{R}}}^{-1}(theta _{1},vec {n}_{1}) {{varvec{R}}}^{-1}(theta _{2},vec {n}_{2}) {cdotcdotcdot} {{varvec{R}}}^{-1}(theta _{i-1},vec {n}_{i-1}) int ^{t_{i}}_{t_{i-1}} d t {{varvec{R}}}^{-1}( omega _{i}(t-t_{i-1}),vec {n}_{i})vec {z}Biggr )cdot frac{vec {sigma }}{2}. end{aligned}$$
(22)
Thus, we obtain the following condition from Eq. (20),
$$begin{aligned} sum ^{k}_{i=1} Bigl ({{varvec{R}}}^{-1}(theta _{1},vec {n}_{1}) {{varvec{R}}}^{-1}(theta _{2},vec {n}_{2}) {cdotcdotcdot} {{varvec{R}}}^{-1}(theta _{i-1},vec {n}_{i-1}) int ^{t_{i}}_{t_{i-1}} d t {{varvec{R}}}^{-1}( omega _{i}(t-t_{i-1}),vec {n}_{i})vec {z}Bigr )=vec {0}. end{aligned}$$
(23)
This condition is also equivalent to the following for any vector (vec {p}in {{mathbb {R}}}^{3}):
$$begin{aligned}& vec {p}^{~t}cdot Biggl (sum ^{k}_{i=1} Bigl ({{boldsymbol{R}}}^{-1}(theta _{1},vec {n}_{1}) {{boldsymbol{R}}}^{-1}(theta _{2},vec {n}_{2}) {cdotcdotcdot} {{boldsymbol{R}}}^{-1}(theta _{i-1},vec {n}_{i-1}) int ^{t_{i}}_{t_{i-1}} d t {{boldsymbol{R}}}^{-1}( omega _{i}(t-t_{i-1}),vec {n}_{i})vec {z}Bigr )Biggr )=0, \&quad Longleftrightarrow vec {z}^{~t}cdot Biggl (sum ^{k}_{i=1} int ^{t_{i}}_{t_{i-1}} d t {{boldsymbol{R}}}( omega _{i}(t-t_{i-1}),vec {n}_{i})vec {p}_{i-1}Biggr )=0, end{aligned}$$
(24)
where (vec {p}_{i}:={{varvec{R}}}(theta _{i},vec {n}_{i}){cdotcdotcdot} {{varvec{R}}}(theta _{1},vec {n}_{1}) vec {p}) with (vec {p}_{0}:=vec {p}). In the second line, we transpose the equation and use ({{varvec{R}}}^{t}(theta ,vec {m})={{varvec{R}}}^{-1}(theta ,vec {m})). As the above equation is linear, we can normalise the length of (vec {p}) without loss of generality, and then we identify (vec {p}) with a position vector (quantum state) on the Bloch sphere. Let ({{mathbb {R}}}^{3}_{n}) denote the space of the position vectors on the Bloch sphere.
(vec {p}_{i}) represents the point after the sequence of rotations ({{varvec{R}}}(theta _{i},vec {n}_{i}){{varvec{R}}}(theta _{i-1},vec {n}_{i-1}){cdotcdotcdot} {{varvec{R}}}(theta _{1},vec {n}_{1})). By introducing (vec {p}(t):= {{varvec{R}}}(omega _{i}(t-t_{i-1}),vec {n}_{i}) p_{i-1}~(t_{i-1}le t < t_{i})), we further summarise Eq. (24) as
$$begin{aligned} vec {z}^{~t}cdot int ^{T}_{0} d t vec {p}(t)=0,~~forall vec {p}in {{mathbb {R}}}^{3}_{n}. end{aligned}$$
(25)
The integration in the above equation is the sum of all position vectors on the trajectory,
$$begin{aligned} vec {p}(t):~vec {p}xrightarrow {{{varvec{R}}}(theta _{1},vec {n}_{1})}vec {p}_{1} xrightarrow {{{varvec{R}}}(theta _{2},vec {n}_{2})} {cdotcdotcdot} xrightarrow {{{varvec{R}}}(theta _{k},vec {n}_{k})} vec {p}_{k}. end{aligned}$$
(26)
See Fig. 1. This sequence of rotations corresponds to the action of the errorless unitary operation (V_{k}{cdotcdotcdot} V_{1}) in the Bloch sphere representation. Accordingly, (vec {p}(t)~(0<t<T)) represents the trajectory of the initial state (vec {p}) by the action of this unitary operation. This leads to the following geometrical expression of the ORE robustness condition: a CP is ORE robust if and only if, for any initial state (vec {p}),the time integral of all position vectors on the trajectory by this CP in the Bloch sphere representation exists on the xy plane. Thus, we now express the ORE robustness condition of a CP via the geometric concept associated with the trajectory by the CP. Note that this geometric property is also valid when the Hamiltonian is not piecewise constant but continuously time-dependent; intuitively, the continuous case corresponds to the limit, (krightarrow infty) and (t_{i}-t_{i-1}rightarrow 0), while keeping (T=sum ^{k}_{i=1} (t_{i}-t_{i-1})) constant.
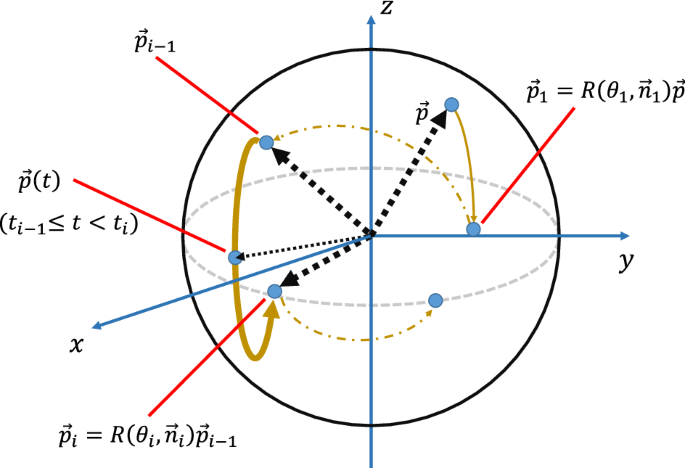
Schematic picture of the trajectory of (vec {p}) by ({{varvec{R}}}(theta _{k},vec {n}_{k}){cdotcdotcdot} {{varvec{R}}}(theta _{1},vec {n}_{1})) on the Bloch sphere. The thick curve represents the trajectory of the i-th operation from (vec {p}_{i-1}) to (vec {p}_{i}). The i-th part of the summation in Eq. (24) is the integration of all position vectors along this trajectory.
Full size image
Constant-(omega) case
Here, we consider the case where (omega _{i}), the magnitude of the control field (H_{0}), is constant throughout the operation: (omega _{i}=omega ~(0<t<T)), which is a common assumption in quantum information processing. In the Bloch sphere representation, a constant (omega) means a constant angular velocity of the motion of the position vector representing a quantum state. We can set (omega =1) without loss of generality. Under this assumption, the above definition (25) of the ORE robustness condition can further be interpreted in a purely geometric way.
First, we focus on each part of the sum in Eq. (24):
$$begin{aligned} int ^{t_{i}}_{t_{i-1}} d t {{varvec{R}}}( t-t_{i-1},vec {n}_{i})vec {p}_{i-1}, end{aligned}$$
(27)
which represents the integral of all the position vectors on the trajectory from the time (t_{i-1}) to (t_{i}). The position vector p(t) during this time interval sweeps the trajectory from (p_{i-1}) to (p_{i}) with a constant speed because both the angular velocity and the rotation radius are constant. The constant rotation radius follows from the constant Hamiltonian during (t_{i-1}) and (t_{i}): The dynamics in the Bloch sphere by the Hamiltonian during this period is a simple rotation with a constant radius. Note that the sweeping speed can differ for different time intervals, e.g., (t_{1}rightarrow t_{2}) and (t_{2}rightarrow t_{3}) because the rotation radii are not necessarily the same.
Equation (27) is rewritten as
$$begin{aligned} int ^{t_{i}}_{t_{i-1}} d t {{varvec{R}}}( t-t_{i-1},vec {n}_{i})vec {p}_{i-1}=(t_{i}-t_{i-1})frac{int ^{t_{i}}_{t_{i-1}} d t {{varvec{R}}}( t-t_{i-1},vec {n}_{i})vec {p}_{i-1}}{t_{i}-t_{i-1}}=(t_{i}-t_{i-1})vec {M}^{i}_{vec {p}}=theta _{i}vec {M}^{i}_{vec {p}}. end{aligned}$$
(28)
Here we use (omega =1) and (omega (t_{i}-t_{i-1})=theta _{i}), and (vec {M}^{i}_{vec {p}}) can be identified as the geometric centre of all the position vectors (vec {p}(t)) during the interval from (t_{i-1}) to (t_{i}) because of the constant speed of (vec {p}(t)). More physically, this geometric centre corresponds to the mass centre of this arc on the trajectory when we assign a constant mass density to each point on the arc. We define (theta _{i}) as the mass of this arc. Thus, Eq. (28) can be regarded as (mass of this arc) (times) (mass centre of this arc).
The sum in Eq. (24) is correspondingly rewritten as
$$begin{aligned} sum ^{k}_{i=1} int ^{t_{i}}_{t_{i-1}} d t {{varvec{R}}}( t-t_{i-1},vec {n}_{i})vec {p}_{i-1}=sum ^{k}_{i=1}theta _{i}vec {M}^{i}_{vec {p}}. end{aligned}$$
(29)
To further consider this sum of the vector, we recall the mass centre for a composite system that consists of k subsystems. When i-th subsystem has the mass (m_{i}) and the mass centre (vec {M}_{i}), the mass centre (vec {M}) of the entire composite system is calculated as (vec {M}=sum ^{k}_{i=1}m_{i}vec {M}_{i}/m), where m is the total mass (sum ^{k}_{i=1}m_{i}). Thus, we define the mass centre of all the position vectors on the trajectory as
$$begin{aligned} vec {M}_{vec {p}}:=frac{sum ^{k}_{i=1}theta _{i}vec {M}^{i}_{vec {p}}}{sum ^{k}_{i=1}theta _{i}}. end{aligned}$$
(30)
Note that the mass (sum ^{k}_{i=1}theta _{i}) equals to the operation time T. Substituting this definition and Eq. (29) into Eq. (24), we obtain the following simple equation:
$$begin{aligned} vec {z}^{~t}cdot vec {M}_{vec {p}}=0,~~~forall vec {p}in {{mathbb {R}}}^{3}_{n}. end{aligned}$$
(31)
where we use the fact that (sum ^{k}_{i=1}theta _{i}=T) is non-zero. This immediately implies that a CP is ORE robust if and only if the mass centre of the errorless trajectory by this CP on the Bloch sphere exists on the xy plane for any initial state (vec {p}). This is the geometric property of ORE robust CPs when we assume that (omega) is constant. In this case, all the information for calculating the ORE robustness is extracted purely graphically from the trajectories on the Bloch sphere.
Two examples of ORE robust composite pulses
In this section, we verify that the mass centre of the trajectory lies on the xy plane for two ORE robust CPs: CORPSE and our newly proposed CP. First, we explain the notation. We assume that the unit vector (vec {n}) for each operation (e^{-i theta vec {n}cdot vec {sigma }/2}) is directed into the xy plane. Without loss of generality, we can represent (vec {n}) by (vec {n}_{phi }:=(cos phi ,sin phi ,0)). We parametrise an operation by (theta) and (phi), and thus define ((theta )_{phi }:=e^{-i theta vec {n}_{phi }cdot vec {sigma }/2}). Accordingly, a CP is written as a sequence ((theta _{k})_{phi _{k}}(theta _{k-1})_{phi _{k-1}}{cdotcdotcdot} (theta _{1})_{phi _{1}}). Also, we assume that (omega =1) during the entire operation. Hence, the discussion below is understood using the mass centre of trajectories, which is a purely geometric concept.
CORPSE
A well-known ORE robust CP, CORPSE, can implement ((theta )_{phi }) as the target operation for any (theta) and (phi). The CORPSE sequence of implementing ((theta )_{phi }) comprises three elementary operations ((k=3)) given by the following parameters:
$$begin{aligned} theta _{1}= 2 n_{1} pi +theta /2-kappa ,~theta _{2}= 2 n_{2} pi -2 kappa ,~theta _{3}= 2 n_{3} pi +theta /2-kappa ,~~phi _{1}=phi _{2}-pi =phi _{3}=phi , end{aligned}$$
(32)
where (kappa =arcsin (sin (theta /2)/2)) and (n_{i}) ((i=1,2,3)) are integers that satisfy (n_{1},n_{3} ge 0), and (n_{2}ge 1). Simple algebraic calculations show that the CORPSE sequence ((theta _{3})_{phi _{3}}(theta _{2})_{phi _{2}}(theta _{1})_{phi _{1}}) satisfies ((theta )_{phi }=(theta _{3})_{phi _{3}}(theta _{2})_{phi _{2}}(theta _{1})_{phi _{1}}) and is ORE robust.
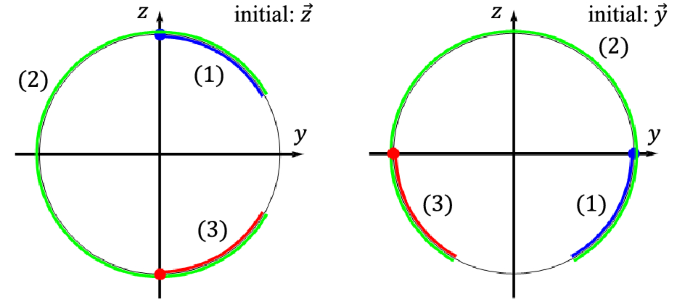
Errorless trajectories on the yz plane by CORPSE ((frac{pi }{3})_{0}(frac{5pi }{3})_{pi }(frac{pi }{3})_{0}), which performs ((pi )_{0}). The left (right) panel has (vec {z}) ((vec {y})) as the initial state. The initial (final) states are represented by the blue (red) points. The blue, green, and red curves represent the first, second, and third pulse trajectories, respectively. The left (right) panel has (vec {z}) ((vec {y})) as the initial state.
Full size image
We show the ORE robustness of CORPSE from a geometric viewpoint. For simplicity, we consider the case in which CORPSE implement ((pi )_{0}), that is, the (pi) rotation with the direction (vec {x}:=(1,0,0)). Also, we take (n_{1}=n_{3}=0) and (n_{2}=1). The parameters for this case are (theta _{1}=theta _{3}=pi /3), (theta _{2}=5 pi /3), (phi _{1}=phi _{3}=0), and (phi _{2}=pi). First, we note that it is only necessary to consider three linear independent unit vectors as (vec {p}) to examine the condition (31) owing to the linearity. We take (vec {x}=(1,0,0)^{t}), (vec {y}=(0,1,0)^{t}), (vec {z}=(0,0,1)^{t}) as (vec {p}). The vector (vec {x}) is a fixed point during the entire operation, and thus, the mass centre of the trajectory starting from (vec {x}) is on the xy plane. We then examine the trajectory from the staring points (vec {y}) and (vec {z}). It is convenient to show the yz plane to consider the mass centre of these trajectory (Fig. 2). Note that the information of the x direction is redundant when we consider these trajectories by CORPSE. The mass centre of the trajectory from (vec {z}) is calculated as follows.
$$begin{aligned} vec {M}_{vec {z}}=&frac{1}{T}int ^{T}_{0} d t vec {p}(t)=frac{3}{7pi }int ^{frac{7pi }{3}}_{0} d t vec {p}(t)nonumber \ =&frac{3}{7pi }int ^{frac{pi }{3}}_{0} d theta {{varvec{R}}}(theta ,vec {x})(0,0,1)^{t}+ frac{3}{7pi }int ^{frac{5pi }{3}}_{0} d theta {{varvec{R}}}(theta ,-vec {x})Bigl (0,sin bigl (frac{pi }{3}bigr ),cos bigl (frac{pi }{3}bigr )Bigr )^{t} +frac{3}{7pi }int ^{frac{pi }{3}}_{0} d theta {{varvec{R}}}(theta ,vec {x})Bigl (0,sin bigl (frac{2pi }{3}bigr ),cos bigl (frac{2pi }{3}bigr )Bigr )^{t}nonumber \ =&frac{3}{7pi }Biggl (int ^{frac{pi }{3}}_{0}-int ^{frac{2pi }{3}}_{frac{pi }{3}}+int ^{pi }_{frac{2pi }{3}}Biggr ) d theta (0,sin theta , cos theta )^{t}nonumber \ =&frac{3}{7pi }Bigl ([(0,-cos theta , sin theta )^{t}]^{frac{pi }{3}}_{0}-[(0,-cos theta , sin theta )^{t}]^{frac{2pi }{3}}_{frac{pi }{3}}+[(0,-cos theta , sin theta )^{t}]^{pi }_{frac{2pi }{3}}Bigr )=vec {0}. end{aligned}$$
(33)
Thus (vec {z}^{~t}cdot vec {M}_{vec {z}}=vec {z}^{~t}cdot vec {0}=0). It is also shown that (vec {M}_{vec {y}}=vec {0}) because the trajectories from (vec {y}) and (vec {z}) (and these mass centres) are related by (frac{pi }{2})-rotation. Refer to Fig. 2. Thus, the condition (31) is satisfied for CORPSE.
CORP(^{2})SE (Compensation for Off Resonance with a Perpendicularly combined Pulse SEquence)
CORPSE is a (k=3) symmetric CP satisfying (phi _{1}+pi =phi _{2}) ((vec {n}_{1}cdot vec {n}_{2}=-1)). It is a natural question whether there exists a symmetric (k=3) CP with the condition (phi _{1}+pi /2=phi _{2}) ((vec {n}_{1}cdot vec {n}_{2}=0)). Under the assumption that (vec {n}_{1}cdot vec {n}_{2}=0), we find the following symmetric (k=3) CP that implements ((theta )_{phi }):
$$begin{aligned} theta _{1}&=theta _{3}=arcsin Bigl (-sqrt{frac{1-alpha ^{2}}{1+alpha ^{2}}}Bigr ),~~theta _{2}=arccos (alpha ^{2})nonumber \&quad phi _{1}+{3pi /4}=phi _{3}+{3pi /4}=phi _{2}{+}pi /4=phi , end{aligned}$$
(34)
where (alpha =cos (theta /2)). We named this sequence CORP(^{2})SE (Compensation for Off Resonance with a Perpendicularly constructed Pulse SEquence). CORPSE has the same rotation axis for all elementary operations whereas CORP(^{2})SE has one orthogonal rotation axis at the middle operation. In Materials, we evaluate the performance of CORP(^{2})SE comparing with CORPSE.
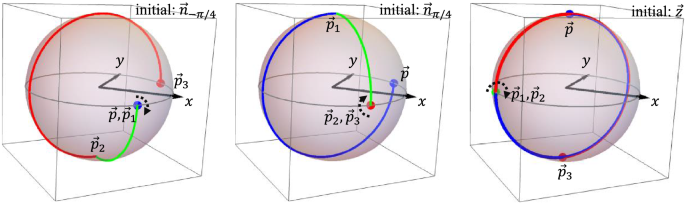
Errorless trajectories by CORP(^{2})SE. The left, middle, and right panels show (vec {n}_{-pi /4}), (vec {n}_{pi /4}), and (vec {z}) as the initial state. The initial (final) states are represented by the blue (red) points. The blue, green, and red lines represent the first, second, and third pulse trajectories, respectively. The black arrows show the action of pulses when the state remains at a fixed point of the pulse.
Full size image
We consider the case in which CORP(^{2})SE (34) performs ((pi )_{0}). The parameters are taken to be (theta _{1}=theta _{3}=frac{3 pi }{2}), (theta _{2}=pi /2), (phi _{1}=phi _{3}=-frac{3pi }{4}), and (phi _{2}=-frac{pi }{4}). In Fig. 3, we show the errorless trajectories from (vec {z}), (vec {n}_{-pi /4}=frac{1}{sqrt{2}}(1,-1,0)), and (vec {n}_{pi /4}=frac{1}{sqrt{2}}(1,1,0)), which are convenient to evaluate the mass centres of trajectories. Each trajectory has the same length on the northern and southern hemispheres. For instance, the trajectory from (vec {z}) (right panel) has a length of (3times pi /2) for each hemisphere. As trajectories from all three initial states are always on great circles, or equivalently the rotation radius is always 1, the length is simply translated to the mass. That is, the northern and southern parts of the trajectory has the same mass. Also, one can graphically find that the mass centres of the northern and southern part have the same absolute value of the z component for all cases. These two facts implies that the mass centre of the trajectory is directed onto the xy plane for all initial states. Thus, for (pi)-rotation, we graphically confirm that this CORP(^{2})SE is ORE robust.
Conclusions and discussions
In this study, we found the geometric property of the ORE robustness condition. We consider the position vector (vec {p}(t)) on the Bloch sphere, which represents a quantum state during a CP. The time average of (vec {p}(t)) for any initial state has a vanishing z component if and only if the CP is ORE robust. When the magnitude of the control Hamiltonian is constant, this integral of (vec {p}(t)) is proportional to the mass centre of the trajectory. For CORPSE and our proposed ORE robust CP, CORP(^{2})SE, we confirmed that the mass centres of their trajectories from any initial point are on the xy plane on the Bloch sphere, as expected. Until now, only the geometric property of PLE robust pulses has been concretely known, and such properties of ORE robust CPs have not been well investigated. One reason for this is that the error term of ORE does not commute with the control Hamiltonian even at the same time unlike PLE. This makes the analysis of the ORE robust condition difficult algebraically. Our results of the geometric property will increase the tractability of ORE robust CPs and provide a deeper understanding of the ORE robustness. Also, the geometrical property of the ORE robustness could be utilized when we seek unknown ORE robust CPs. At least, we can intuitively (or without calculations) check whether an operation sequence is ORE robust or not, although direct calculations might be better when the sequence is complicated.
Materials
Performance comparison between CORPSE and CORP(^{2})SE
We evaluate the performance of CORP(^{2})SE and compare it with that of CORPSE. Figure 4 (a) shows the trajectories targeting the ((pi )_{0}) operation by them with ORE from the initial state (vec {z}). We can observe that both CPs compensate ORE, compared with the elementary ((pi )_{0}) operation.
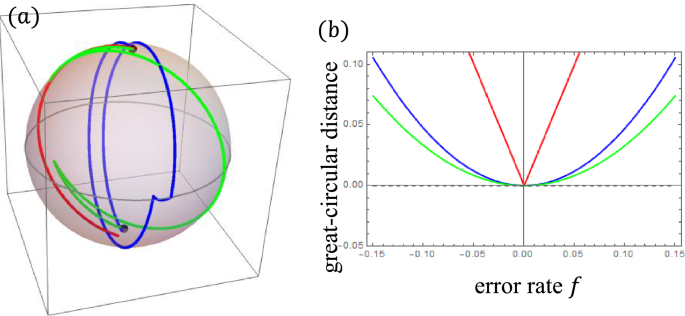
The performance of the ORE robust CPs. In (a), the trajectories with ORE for two CPs targeting the ((pi )_{0}) operation are drawn. The red, green, and blue lines represent the elementary (pi) operation, CORPSE, and CORP(^{2})SE, respectively. The ORE rate is set to be (f=0.1). The initial state is (vec {z}). In (b), we plot the accuracy of these operations defined by the great-circular distance as a function of the ORE rate f. The colours of the curves represent the same operations as those in (a).
Full size image
To examine the performance of the CPs more precisely, we consider the great-circular distance on the Bloch sphere. For the ((pi )_{0}) operation on the state corresponding to (vec {z}) (north pole), the ideal operation maps the initial state (vec {z}) to (-vec {z}). The great-circular distance between (-vec {z}) and the end point of the operation with ORE from (vec {z}) has a positive value as a function of f. We characterise the accuracy of the (pi) rotation using the great-circular distance from (-vec {z}). The smaller the distance, the better the accuracy. Figure 4 (b) plots the great-circular distance between (-vec {z}) and the end point of the elementary (pi) operation, CORPSE, and CORP(^{2})SE initiated from (vec {z}). While the absolute value of the error rate f increases, the distance increases for any case, and the accuracy of the (pi) operation decreases. The distance for CORPSE and CORP(^{2})SE behaves as (propto f^{2}) around (f=0), whereas the distance for the elementary (pi) operation behaves as (propto |f|). These behaviours are due to the definition of the ORE robustness. CORP(^{2})SE provides slightly worse accuracy than CORPSE in the entire region of f, and the total CORP(^{2})SE operation (non-dimensionalised) time is longer than that of CORPSE: (7 pi /3) for CORPSE and (7 pi /2) for CORP(^{2})SE.
References
-
Bennett, C. H. & DiVincenzo, D. P. Quantum information and computation. Nature 404, 247–255 (2000).
Article
ADS
CASGoogle Scholar
-
Nielsen, M. & Chuang, I. Quantum Computation and Quantum Information. Cambridge Series on Information and the Natural Sciences (Cambridge University Press, 2000). https://books.google.co.jp/books?id=aai-P4V9GJ8C.
-
Nakahara, M. Quantum Computing: From Linear Algebra to Physical Realizations (CRC Press, 2008).
Book
Google Scholar
-
Helstrom, C. W. Quantum Detection and Estimation Theory Vol. 84 (Academic Press, 1976).
MATH
Google Scholar
-
Caves, C. M. Quantum-mechanical noise in an interferometer. Phys. Rev. D 23, 1693 (1981).
Article
ADSGoogle Scholar
-
Holevo, A. S. Probabilistic and Statistical Aspects of Quantum Theory Vol. 1 (Springer, 2011).
Book
Google Scholar
-
Counsell, C., Levitt, M. & Ernst, R. Analytical theory of composite pulses. J. Magn. Reson. 1969(63), 133–141 (1985).
ADS
Google Scholar
-
Levitt, M. H. Composite pulses. Prog. Nucl. Magn. Reson. Spectrosc. 18, 61–122 (1986).
Article
ADS
CASGoogle Scholar
-
Claridge, T. D. High-Resolution NMR Techniques in Organic Chemistry Vol. 27 (Elsevier, 2016).
Google Scholar
-
Gershenfeld, N. A. & Chuang, I. L. Bulk spin-resonance quantum computation. Science 275, 350–356 (1997).
Article
MathSciNet
CASGoogle Scholar
-
Cory, D. G., Fahmy, A. F. & Havel, T. F. Ensemble quantum computing by nmr spectroscopy. Proc. Natl. Acad. Sci. 94, 1634–1639 (1997).
Article
ADS
CASGoogle Scholar
-
Vandersypen, L. M. et al. Experimental realization of Shor’s quantum factoring algorithm using nuclear magnetic resonance. Nature 414, 883–887 (2001).
Article
ADS
CASGoogle Scholar
-
Bando, M. et al. Concatenated composite pulses applied to liquid-state nuclear magnetic resonance spectroscopy. Sci. Rep. 10, 1–10 (2020).
Article
Google Scholar
-
Gulde, S. et al. Implementation of the deutsch-jozsa algorithm on an ion-trap quantum computer. Nature 421, 48–50 (2003).
Article
ADS
CASGoogle Scholar
-
Collin, E. et al. Nmr-like control of a quantum bit superconducting circuit. Phys. Rev. Lett. 93, 157005 (2004).
Article
ADS
CASGoogle Scholar
-
Wimperis, S. Broadband, narrowband, and passband composite pulses for use in advanced NMR experiments. J. Magn. Reson. Ser. A 109, 221–231 (1994).
Article
ADS
CASGoogle Scholar
-
Cummins, H. K., Llewellyn, G. & Jones, J. A. Tackling systematic errors in quantum logic gates with composite rotations. Phys. Rev. A 67, 042308 (2003).
Article
ADSGoogle Scholar
-
Brown, K. R., Harrow, A. W. & Chuang, I. L. Arbitrarily accurate composite pulse sequences. Phys. Rev. A 70, 052318 (2004).
Article
ADSGoogle Scholar
-
Torosov, B. T. & Vitanov, N. V. Smooth composite pulses for high-fidelity quantum information processing. Phys. Rev. A 83, 053420. https://doi.org/10.1103/PhysRevA.83.053420 (2011).
Article
ADS
CASGoogle Scholar
-
Torosov, B. T., Guérin, S. & Vitanov, N. V. High-fidelity adiabatic passage by composite sequences of chirped pulses. Phys. Rev. Lett. 106, 233001. https://doi.org/10.1103/PhysRevLett.106.233001 (2011).
Article
ADS
CAS
PubMedGoogle Scholar
-
Jones, J. A. Designing short robust not gates for quantum computation. Phys. Rev. A 87, 052317 (2013).
Article
ADSGoogle Scholar
-
Genov, G. T., Schraft, D., Halfmann, T. & Vitanov, N. V. Correction of arbitrary field errors in population inversion of quantum systems by universal composite pulses. Phys. Rev. Lett. 113, 043001. https://doi.org/10.1103/PhysRevLett.113.043001 (2014).
Article
ADS
CAS
PubMedGoogle Scholar
-
Kyoseva, E., Greener, H. & Suchowski, H. Detuning-modulated composite pulses for high-fidelity robust quantum control. Phys. Rev. A 100, 032333. https://doi.org/10.1103/PhysRevA.100.032333 (2019).
Article
ADS
CASGoogle Scholar
-
Cummins, H. & Jones, J. Use of composite rotations to correct systematic errors in NMR quantum computation. New J. Phys. 2, 6 (2000).
Article
ADSGoogle Scholar
-
Möttönen, M., de Sousa, R., Zhang, J. & Whaley, K. B. High-fidelity one-qubit operations under random telegraph noise. Phys. Rev. A 73, 022332 (2006).
Article
ADSGoogle Scholar
-
Said, R. & Twamley, J. Robust control of entanglement in a nitrogen-vacancy center coupled to a c 13 nuclear spin in diamond. Phys. Rev. A 80, 032303 (2009).
Article
ADSGoogle Scholar
-
Timoney, N. et al. Error-resistant single-qubit gates with trapped ions. Phys. Rev. A 77, 052334 (2008).
Article
ADSGoogle Scholar
-
Bando, M., Ichikawa, T., Kondo, Y. & Nakahara, M. Concatenated composite pulses compensating simultaneous systematic errors. J. Phys. Soc. Jpn. 82, 014004 (2012).
Article
ADSGoogle Scholar
-
Kondo, Y. & Bando, M. Geometric quantum gates, composite pulses, and Trotter–Suzuki formulas. J. Phys. Soc. Jpn. 80, 054002 (2011).
Article
ADSGoogle Scholar
-
Merrill, J. T. & Brown, K. R. Progress in compensating pulse sequences for quantum computation. Quantum Inf. Comput. Chem. 20, 241–294 (2014).
MATH
Google Scholar
-
Zanardi, P. & Rasetti, M. Holonomic quantum computation. Phys. Lett. A 264, 94–99 (1999).
Article
ADS
MathSciNet
CASGoogle Scholar
-
Zhu, S.-L. & Wang, Z. Implementation of universal quantum gates based on nonadiabatic geometric phases. Phys. Rev. Lett. 89, 097902 (2002).
Article
ADSGoogle Scholar
-
Ota, Y. & Kondo, Y. Composite pulses in NMR as nonadiabatic geometric quantum gates. Phys. Rev. A 80, 024302 (2009).
Article
ADSGoogle Scholar
-
Berry, M. V. Quantal phase factors accompanying adiabatic changes. Proc. R. Soc. Lond. A Math. Phys. Sci. 392, 45–57 (1984).
ADS
MathSciNet
MATHGoogle Scholar
-
Page, D. N. Geometrical description of berry’s phase. Phys. Rev. A 36, 3479 (1987).
Article
ADS
MathSciNet
CASGoogle Scholar
-
Aharonov, Y. & Anandan, J. Phase change during a cyclic quantum evolution. Phys. Rev. Lett. 58, 1593 (1987).
Article
ADS
MathSciNet
CASGoogle Scholar
-
Nakahara, M. Geometry, Topology and Physics (CRC Press, 2018).
Book
Google Scholar
Download references
Acknowledgements
This work was supported by JSPS Grants-in-Aid for Scientific Research (21K03423) and CREST (JPMJCR1774).
Author information
Authors and Affiliations
-
Department of Physics, Kindai University, Higashi, Osaka, 577-8502, Japan
Shingo Kukita, Haruki Kiya & Yasushi Kondo
Authors
- Shingo Kukita
You can also search for this author in
PubMed Google Scholar - Haruki Kiya
You can also search for this author in
PubMed Google Scholar - Yasushi Kondo
You can also search for this author in
PubMed Google Scholar
Contributions
All the authors contributed equally to this work.
Corresponding author
Correspondence to
Shingo Kukita.
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
Reprints and Permissions
About this article
Cite this article
Kukita, S., Kiya, H. & Kondo, Y. Geometric property of off resonance error robust composite pulse.
Sci Rep 12, 9574 (2022). https://doi.org/10.1038/s41598-022-13207-z
Download citation
-
Received: 27 October 2021
-
Accepted: 23 May 2022
-
Published: 10 June 2022
-
DOI: https://doi.org/10.1038/s41598-022-13207-z