|
SergeyKagen 3 / 4 / 2 Регистрация: 02.04.2018 Сообщений: 315 |
||||
|
1 |
||||
|
19.04.2019, 22:16. Показов 132055. Ответов 14 Метки нет (Все метки)
Простой код, но Arduino IDE напрочь отказывается принимать переменные. Что за глюк или я что-то неправильно делаю?
ошибка при компиляции «‘count’ was not declared in this scope», что не так?
__________________
0 |

|
marat_miaki 495 / 389 / 186 Регистрация: 08.04.2013 Сообщений: 1,688 |
||||
|
19.04.2019, 23:26 |
2 |
|||
|
Решение
1 |
 Сообщение было отмечено SergeyKagen как решение
Сообщение было отмечено SergeyKagen как решение
|
Lavad 0 / 0 / 0 Регистрация: 03.10.2015 Сообщений: 25 |
||||||||
|
14.09.2019, 22:33 |
3 |
|||||||
|
Доброго времени суток!
В loop() делаю вызов:
При компиляции выделяется этот вызов, с сообщением: ‘myDisplay’ was not declared in this scope Замучился искать инфу о декларации/обьявлении функции. Везде, что находил, понимал одно: если ты вызываешь функцию, это и есть обьявление функции P.S. Код, что использовал в качестве функции, работоспособен. Раньше находился в loop(). Скетч постепенно разрастается, много однотипных обращений к дисплею…
0 |

|
8385 / 6147 / 615 Регистрация: 10.12.2010 Сообщений: 28,683 Записей в блоге: 30 |
|
|
14.09.2019, 23:57 |
4 |
|
Создал функцию (за пределами setup и loop), Перевидите на нормальный язык. В другом файле что ли? Добавлено через 1 минуту
Замучился искать инфу о декларации/обьявлении функции. Везде, что находил, понимал одно: если ты вызываешь функцию, это и есть обьявление функции Читать учебники по С++ не пробовали? https://metanit.com/cpp/tutorial/3.1.php Специфика Arduino лишь отличается тем что пред объявления не всегда нужны. Добавлено через 7 минут
0 |

|
ValeryS Модератор
8759 / 6549 / 887 Регистрация: 14.02.2011 Сообщений: 22,972 |
||||
|
15.09.2019, 00:09 |
5 |
|||
|
Везде, что находил, понимал одно: если ты вызываешь функцию, это и есть обьявление функции это где ж такое написано?
а объявить уже в удобном месте
0 |
|
0 / 0 / 0 Регистрация: 03.10.2015 Сообщений: 25 |
|
|
15.09.2019, 00:48 |
6 |
|
Неделю назад ВПЕРВЫЕ включил Arduino Uno. Написал на том же языке, что и читал на всяких форумах и справочниках по Arduino :-). За пределами этих функций — значит не внутри них. Обе приведенных Вами ссылок просмотрел, проверил в скетче… В итоге вылезла другая ошибка: void myDisplay(byte x, byte y, char str) тоже пробовал. Та же ошибка. Что не так на этот раз?
0 |
|
Модератор
8759 / 6549 / 887 Регистрация: 14.02.2011 Сообщений: 22,972 |
|
|
15.09.2019, 01:26 |
7 |
|
В итоге вылезла другая ошибка: точку с запятой в конце поставил?
1 |
|
Lavad 0 / 0 / 0 Регистрация: 03.10.2015 Сообщений: 25 |
||||||||||||
|
15.09.2019, 08:46 |
8 |
|||||||||||
|
Вот скетч. Проще некуда.
Любое из трех так называемых «объявлений» (строки 7…9) выдает одну и ту же ошибку — я пытаюсь объявить функцию как переменную. Добавлено через 9 минут
Компилятор задумался (я успел обрадоваться), но, зараза :-), он снова поставил свой автограф undefined reference to `myDisplay(unsigned char, unsigned char, char, float) На этот раз он пожаловался на строку вызова функции. Добавлено через 34 минуты
Dispay вместо Display Добавлено через 8 минут
0 |


|
ValeryS Модератор
8759 / 6549 / 887 Регистрация: 14.02.2011 Сообщений: 22,972 |
||||||||
|
15.09.2019, 10:36 |
9 |
|||||||
|
void myDisplay(byte, byte, char, float) = 0; вот так не надо делать(приравнивать функцию к нулю) Добавлено через 5 минут
void myDispay(byte x, byte y, char str, float temp)
myDisplay(0, 0, «C», temp); просишь чтобы функция принимала символ
или проси передавать строку, например так
1 |
|
Avazart
8385 / 6147 / 615 Регистрация: 10.12.2010 Сообщений: 28,683 Записей в блоге: 30 |
||||
|
15.09.2019, 12:02 |
10 |
|||
|
Кроме того наверное лучше так:
Тогда можно будет вынести ф-цию в отдельный файл/модуль.
1 |
|
locm |
|
15.09.2019, 21:07
|
|
Не по теме:
Arduino Uno.
AVR (Basic, немного Assembler). Arduino Uno это AVR, для которого можете писать на бейсике или ассемблере.
0 |
|
Avazart |
|
15.09.2019, 21:21
|
|
Не по теме:
Arduino Uno это AVR, для которого можете писать на бейсике или ассемблере. Но лучше не надо …
0 |
|
Lavad 0 / 0 / 0 Регистрация: 03.10.2015 Сообщений: 25 |
||||
|
16.09.2019, 12:12 |
13 |
|||
|
это где ж такое написано? Оказалось, что я верно понял чтиво по справочникам:
вот так не надо делать(приравнивать функцию к нулю)… Методом проб и ошибок уже понял :-).
или передавай символ… Если передаю в одинарных кавычках более одного символа, а функция ждет как
или проси передавать строку, например так… Буквально вчера попалось это в справочнике, но как-то не дошло, что тоже мой вариант :-).
Кроме того наверное лучше так:
Тогда можно будет вынести ф-цию в отдельный файл/модуль. Благодарю за совет! Как-нибудь проверю…
0 |
|
8385 / 6147 / 615 Регистрация: 10.12.2010 Сообщений: 28,683 Записей в блоге: 30 |
|
|
16.09.2019, 12:54 |
14 |
|
Оказалось, что я верно понял чтиво по справочникам: если ты вызываешь функцию, это и есть обьявление функции Нафиг выкиньте эти справочники.
0 |
|
0 / 0 / 0 Регистрация: 03.10.2015 Сообщений: 25 |
|
|
16.09.2019, 13:00 |
15 |
|
Ссылки Ваши добавлены в закладки. Время от времени заглядываю.
0 |
Прошу помощи разобраться.
Offline
Зарегистрирован: 10.12.2017
Доброго втремени суток господа форумчане. Прошу помощи разобраться в этом проекте. Что то я ника не могу понять почему он не хочет компелироваться.
/*
* RCWController SAMPLE Program
* ESP-WROOM-2 & WALLBOT
* 2016/2/18 by Michio Ono
* http://rcwcontroller.micutil.com
*/
*/
//For Debugging active flag and read out via serial:
//#define DEBUG
#include <ESP8266WiFi.h>
#include <WiFiUdp.h>
#include <EEPROM.h>
WiFiServer server(80);
WiFiUDP Udp;
//client ssid and pw stored in EEPROM!
String ssid = "";
String pass = "";
#define SssidAP "Z21_ESP" // Default Z21 AP (SSID)
#define SpassAP "12345678" // Default Z21 network password
#define SkanalAP 6 // Default Kanal des APSP LPC1768
#define Left_PWM 12 // PIN4 <-> PIN21
#define Left_FWD 14 // PIN3 <->
#define Left_REV 15 // PIN6 <->
#define Rght_PWM 13 // PIN5 <-> PIN22
#define Rght_FWD 4 // PIN10 <->
#define Rght_REV 5 // PIN14 <->
// PIN18 <-> PIN1 : GND
const char ssid[] = "ESP-WallBot"; // your network SSID (name)
const char pass[] = "esp8266ap"; // your network password
WiFiUDP udp;
unsigned int localPort = 10000;
const int PACKET_SIZE = 256;
char packetBuffer[PACKET_SIZE];
int status = WL_IDLE_STATUS;
int prev_S=128;
Motor *left_track;
Motor *right_track;
void setup() {
Serial.begin(115200);
while (!Serial) {
; // wait for serial port to connect. Needed for Leonardo only
}
WiFi.softAP(ssid, pass);
IPAddress myIP = WiFi.softAPIP();
Serial.print("AP IP address: ");
Serial.println(myIP);
Serial.println("Starting UDP");
udp.begin(localPort);
Serial.print("Local port: ");
Serial.println(udp.localPort());
left_track = new Motor(Left_PWM, Left_FWD, Left_REV);
right_track = new Motor(Rght_PWM, Rght_FWD, Rght_REV);
left_track->Stop();
right_track->Stop();
}
void loop() {
int rlen, val_V=0,val_S=128;
while (1) {
rlen = udp.parsePacket();
if(rlen<10) {
delay(1);
continue;
}
udp.read(packetBuffer, (rlen > PACKET_SIZE) ? PACKET_SIZE : rlen);
val_S=packetBuffer[5];
if(val_S!=prev_S) {
//Right analogue y-axis
left_track->ChangeSpeed(val_S);
right_track->ChangeSpeed(val_S);
prev_S=val_S;
}
val_V=packetBuffer[1];
if(val_V) {
switch (val_V) {
case 1://Left cross up
left_track->ChangeDirection((boolean)FORWARD);
right_track->ChangeDirection((boolean)FORWARD);
break;
case 2://Left cross down
left_track->ChangeDirection((boolean)REVERSE);
right_track->ChangeDirection((boolean)REVERSE);
break;
case 4://Left cross right
left_track->ChangeDirection((boolean)REVERSE);
right_track->ChangeDirection((boolean)FORWARD);
break;
case 8://Left cross right
left_track->ChangeDirection((boolean)FORWARD);
right_track->ChangeDirection((boolean)REVERSE);
break;
}
left_track->Rotate();
right_track->Rotate();
} else {
//Release button
left_track->Stop();
right_track->Stop();
}
/*
for(int i=0;i<rlen;i++) {
Serial.printf("%d",packetBuffer[i]);
}
Serial.printf("n");
*/
//delay(10);
}
}
#include <cstdio>
#include <cstring>
#include <cstdlib>
#include <sys/socket.h>
#include <sys/unistd.h>
#include <sys/types.h>
#include <sys/errno.h>
#include <netinet/in.h>
#include <signal.h>
#include <iostream>
#include <thread>
using namespace std;
#define BUFFSIZE 2048
#define DEFAULT_PORT 4001 //
#define MAXLINK 2048
void connecter()
{
printf("Listening...n");
while (true)
{
signal(SIGINT, stopServerRunning); //
//
connfd = accept(sockfd, NULL, NULL);
if (-1 == connfd)
{
printf("Accept error(%d): %sn", errno, strerror(errno));
return -1;
}
}
}
void listener()
{
while(true)
{
bzero(buff, BUFFSIZE);
//
recv(connfd, buff, BUFFSIZE - 1, 0);
//
printf("клиент: %sn", buff);
//
send(connfd, buff, strlen(buff), 0);
}
}
void sender()
{
while(true)
{
printf("Please input: ");
scanf("%s", buff);
send(connfd, buff, strlen(buff), 0);
bzero(buff, sizeof(buff));
recv(connfd, buff, BUFFSIZE - 1, 0);
printf("recv: %sn", buff);
}
}
int sockfd, connfd;
void stopServerRunning(int p)
{
close(sockfd);
printf("Close Servern");
exit(0);
}
int main()
{
struct sockaddr_in servaddr;
char buff[BUFFSIZE];
//
sockfd = socket(AF_INET, SOCK_STREAM, 0);
if (-1 == sockfd)
{
printf("Create socket error(%d): %sn", errno, strerror(errno));
return -1;
}
//
//
bzero(&servaddr, sizeof(servaddr));
servaddr.sin_family = AF_INET;
servaddr.sin_addr.s_addr = htonl(INADDR_ANY);
servaddr.sin_port = htons(DEFAULT_PORT);
if (-1 == bind(sockfd, (struct sockaddr*)&servaddr, sizeof(servaddr)))
{
printf("Bind error(%d): %sn", errno, strerror(errno));
return -1;
}
//
//
if (-1 == listen(sockfd, MAXLINK))
{
printf("Listen error(%d): %sn", errno, strerror(errno));
return -1;
}
while(true)
{
thread my_thread(connecter);
if(connfd == true)
break;
}
thread my_thread(connecter);
thread my_thread(listener);
thread my_thread(sender);
return 0;
}
}это исходный код программы, хотел написать что-то вроде чата на сокетах. Я попытался скомпилировать код, но он мне выдал несколько ошибок «was not declared in this scope». Вот вывод компилятора:
server.cpp: In function ‘void connecter()’:
server.cpp:24:24: error: ‘stopServerRunning’ was not declared in this scope
24 | signal(SIGINT, stopServerRunning); // Это предложение используется для выключения сервера при вводе Ctrl + C
|
server.cpp:26:9: error: ‘connfd’ was not declared in this scope
26 | connfd = accept(sockfd, NULL, NULL);
| ^~~~~~
server.cpp:26:25: error: ‘sockfd’ was not declared in this scope; did you mean ‘socket’?
26 | connfd = accept(sockfd, NULL, NULL);
| ^~~~~~
| socket
server.cpp: In function ‘void listener()’:
server.cpp:39:15: error: ‘buff’ was not declared in this scope
39 | bzero(buff, BUFFSIZE);
| ^~~~
server.cpp:41:14: error: ‘connfd’ was not declared in this scope
41 | recv(connfd, buff, BUFFSIZE - 1, 0);
| ^~~~~~
server.cpp: In function ‘void sender()’:
server.cpp:54:21: error: ‘buff’ was not declared in this scope
54 | scanf("%s", buff);
| ^~~~
server.cpp:55:14: error: ‘connfd’ was not declared in this scope
55 | send(connfd, buff, strlen(buff), 0);
| ^~~~~~я думаю, что все эти ошибки идут из одной проблемы, но не могу понять откуда
Arduino programming is an open-source and simple stage that arranges the Arduino board into working with a particular goal in mind. An Arduino code is written in C++ yet with extra capacities and strategies. An Arduino is an equipment and programming stage broadly utilised in hardware.
In this article, we go through three quick fixes for the error ‘was not declared in this scope’.
Also read: How to solve the Tower of Hanoi problem using Python?
What does the error mean?
Every programming language has a concept of Scope. Scope tells us where a specific variable, constant or function is accessible and usable. It refers to the area of code a statement, block, or name. The scope of an entity determines where that entity is usable in other parts of the program. The scope of a block determines where that block can be used in other blocks, and the scope of a name determines where that name can be used in other names.
There are two types of scope in programming languages: local and global. Local scope refers to the identifiers and symbols visible inside a block of code. Global scope, on the other hand, refers to the identifiers and symbols visible outside a block of code.
The error ‘was not declared in this scope’ generally occurs when a variable or function is not accessible to its call. A global variable in Arduino is the variable that is declared outside any function, including the setup() and loop() functions. Any variable declared inside a function or loop has restrictive access and is a local variable.
If any other function calls a local variable, it gives an error. To call any variable or function in any other function, including the setup() and loop() function, it should be declared as a global variable.
Also read: How to stop an Arduino program?
There are the quick fixes for the Arduino error: was not declared in the scope.
Declare the variable
Before assigning a value to the variable, make sure to define it. There are 16 data types commonly used in Arduino coding. Each data type expresses the nature of the value assigned to it. If the data type and value doesn’t match, an error arises. Also, if a variable is assigned any value without its declaration or data type, the error occurs.
Always ensure to declare the variable before the assignment. There are two ways to do this.
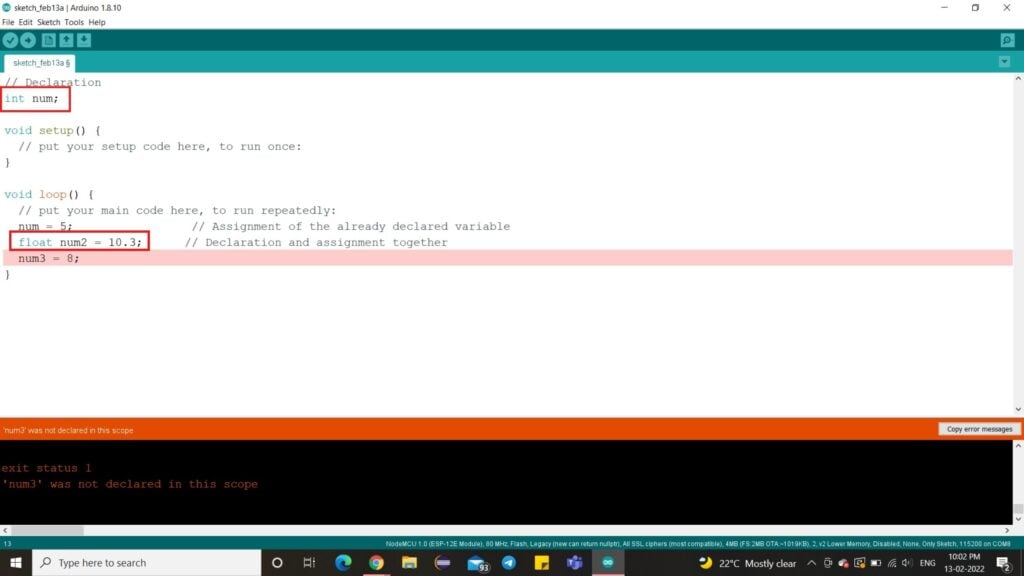
There are three variables in the above example – num1, num2 and num3. The variable num1 has been declared separately and assigned to a data type corresponding value in the loop. The variable num2 has been declared and assigned in the same line of code. The variable num3, on the other hand, has directly been assigned a value without its declaration. This causes the error, as shown above.
Other details
There may be errors arising even after proper declaration and assignment of the variable. This may be due to incorrect or absence of the closing brackets, semicolons or improper declaration of functions. Ensure proper use of syntax when defining loops and functions. Every opening in curly brace must be accounted for and closed. Extra closing braces also cause errors. Alongside, semicolons hold their importance. A semicolon missed can cause the entire program to go haywire.
Library folder
Many times, variables call or use functions that require importing a few specific libraries.

In the example above, the variable num calls the square root function – sqrt() from the maths library of Arduino. If we call a function without including its library first, an error occurs. There are multiple inbuilt and standard libraries in Arduino, while a few special libraries must be included separately.
Also read: What is ‘does not name a type’ in Arduino: 2 Fixes.
лови:
/*
Лабораторный блок питания под управлением arduino
Версия 2 (26.02.2015)
Для дополнительной информации посетите http://start.net.ua/blog/lab_power_arduino/
*/
#include <LiquidCrystal.h>;
#include <EEPROM.h>
LiquidCrystal lcd(11, 6, 5, 4, 3, 2); //rs, e, d4, d5, d6, d7
// задаем константы
float umax = 17.00; //максимальное напряжение
float umin = 0.00; //минимальное напряжение
float ah = 0.0000; //Cчетчик Ампер*часов
const int down = 10; //выход валкодера 1/2
const int up = 8; //выход валкодера 2/2
const int pwm = 9; //выход ШИМ
const int power = 7; //управление релюхой
long previousMillis = 0; //храним время последнего обновления дисплея
long maxpwm = 0; //циклы поддержки максимального ШИМ
long interval = 500; // интервал обновления информации на дисплее, мс
int mig = 0; //Для енкодера (0 стоим 1 плюс 2 минус)
float level = 0; //»уровень» ШИМ сигнала
float com = 100;
long com2 = 0;
int mode = 0;//режим (0 обычный, спабилизация тока, защита по току)
int mode1 = 0;
float Ioutmax = 1.0; //заданный ток
int set = 0; //пункты меню, отображение защиты…
int knopka_a = 0; //состояние кнопок
int knopka_b = 0;
int knopka_ab = 0;
boolean off = false;
boolean red = false;
boolean blue = false;
float counter = 5; // переменная хранит заданное напряжение
int disp = 0; //режим отображения 0 ничего, 1 мощьность, 2 режим, 3 установленный ток, 4 шим уровень
float Uout ; //напряжение на выходе
const int Pin=A2; // номер выхода, подключенного к реле
int PinState = LOW; // этой переменной устанавливаем состояние реле
long previousMillis1 = 0; // храним время последнего переключения реле
long interval1 = 1000; // интервал между включение/выключением реле (1 секунда)
long interval2 = 500;
int incomingByte;
void EEPROM_float_write(int addr, float val) // запись в ЕЕПРОМ
{
byte *x = (byte *)&val;
for(byte i = 0; i < 4; i++) EEPROM.write(i+addr, x[i]);
}
float EEPROM_float_read(int addr) // чтение из ЕЕПРОМ
{
byte x[4];
for(byte i = 0; i < 4; i++) x[i] = EEPROM.read(i+addr);
float *y = (float *)&x;
return y[0];
}
void setup() {
cli();
DDRB |= 1<<1 | 1<<2;
PORTB &= ~(1<<1 | 1<<2);
TCCR1A = 0b00000010;
//TCCR1A = 0b10100010;
TCCR1B = 0b00011001;
ICR1H = 255;
ICR1L = 255;
sei();
int pwm_rez = 13;
pwm_rez = pow(2, pwm_rez);
ICR1H = highByte(pwm_rez);
ICR1L = lowByte(pwm_rez);
// задаем режим выхода для порта, подключенного к реле
pinMode(Pin, OUTPUT);
Serial.begin(9600);
pinMode(pwm, OUTPUT);
pinMode(down, INPUT);
pinMode(up, INPUT);
pinMode(12, INPUT);
pinMode(13, INPUT);
pinMode(power, OUTPUT);
pinMode(A4, OUTPUT);
pinMode(A5, OUTPUT);
// поддерживаем еденицу на входах от валкодера
digitalWrite(up, 1);
digitalWrite(down, 1);
//поддерживаем еденицу на контактах кнопок
digitalWrite(12, 1);
digitalWrite(13, 1);
//запуск дисплея
lcd.begin(16, 2);
lcd.print(» WELCOME! «);
//загружаем настройки из памяти МК
counter = EEPROM_float_read(0);
Ioutmax = EEPROM_float_read(4);
mode = EEPROM_float_read(12);
disp = EEPROM_float_read(10);
//Если в памяти еще нет настроек — задаем что нибудь кроме нулей
if(counter==0) counter = 5; //5 вольт
if(Ioutmax==0) Ioutmax = 2; //2 ампера
//включаем реле
digitalWrite(power, 1);
}
//функции при вращении енкодера
void uup(){ //енкодер +
if(set==0){//обычный режим — добавляем напряжения
if(counter<umax) {
counter = counter+0.1;//добавляем
}
}
if(set==1){ //переключаем режим работы вперед
mode = mode+1;
if(mode>2) mode=2;
}
if(set==2){ //переключаем режим работы вперед (ON)
mode1 = mode1+1;
if(mode1>1) mode1=1;
}
if(set==3){ //настройка тока, добавляем ток
iplus();
}
if(set==4){//сброс счетчика А*ч
ah = 0;
set = 0;
disp = 5;
}
if(set==5){//сохранение текущих настроек в память
save();
}
}
void udn(){ //валкодер —
if(set==0){
if(counter>umin+0.1)counter = counter-0.1; //убавляем напнряжение
}
if(set==1){
mode = mode-1; //переключаем режим работы назад
if(mode<0) mode=0;
}
if(set==2){ //переключаем режим работы назад (OFF)
mode1 = mode1-1;
if(mode1<0) mode1=0;
}
if(set==3){//убавляем ток
iminus();
}
}
void iplus(){
Ioutmax = Ioutmax+0.01;
if(Ioutmax>0.2) Ioutmax=Ioutmax+0.04;
if(Ioutmax>1) Ioutmax=Ioutmax+0.05;
if(Ioutmax>8.00) Ioutmax=8.00;
}
void iminus(){
Ioutmax = Ioutmax-0.01;
if(Ioutmax>0.2) Ioutmax=Ioutmax-0.04;
if(Ioutmax>1) Ioutmax=Ioutmax-0.05;
if(Ioutmax<0.03) Ioutmax=0.03;
}
void save(){
lcd.clear();
lcd.setCursor (0, 0);
lcd.print(» S A V E — OK «);
EEPROM_float_write(0, counter);
EEPROM_float_write(4, Ioutmax);
EEPROM_float_write(12, mode);
EEPROM_float_write(10, disp);
//мигаем светодиодами
digitalWrite(A4, 1);
digitalWrite(A5, 1);
delay(500);
digitalWrite(A4, 0);
digitalWrite(A5, 0);
set = 0; //выходим из меню
}
void loop() //основной цикл работы МК
{
// здесь будет код, который будет работать постоянно
// и который не должен останавливаться на время между переключениями свето
unsigned long currentMillis1 = millis();
//проверяем не прошел ли нужный интервал, если прошел то
if((currentMillis1 — previousMillis1 > interval1)&(mode1==1)) {
// сохраняем время последнего переключения
previousMillis1 = currentMillis1;
// если светодиод не горит, то зажигаем, и наоборот
if (PinState == LOW)
PinState = HIGH;
else
PinState = LOW;
// устанавливаем состояния выхода, чтобы включить или выключить светодиод
digitalWrite(Pin, PinState);
}
unsigned long currentMillis = millis();
/* Вншнее управление */
if (Serial.available() > 0) { //если есть доступные данные
// считываем байт
incomingByte = Serial.read();
}else{
incomingByte = 0;
}
if(incomingByte==97){ //a
if(counter>umin+0.1)counter = counter-0.1; //убавляем напнряжение
}
if(incomingByte==98){ //b
if(counter<umax) counter = counter+0.1;//добавляем
}
if(incomingByte==99){ //c
iminus();
}
if(incomingByte==100){ //d
iplus();
}
if(incomingByte==101) mode = 0;
if(incomingByte==102) mode = 1;
if(incomingByte==103) mode = 2;
if(incomingByte==104) mode1 = 1;
if(incomingByte==105) save();
if(incomingByte==106){
digitalWrite(power, 1); //врубаем реле если оно было выключено
delay(100);
digitalWrite(A4, 0); //гасим красный светодиод
Serial.print(‘t’);
Serial.print(0);
Serial.print(‘;’);
off = false;
set = 0;//выходим из меню
}
if(incomingByte==107) off = true;
if(incomingByte==108) ah = 0;
/* конец внешнего управления */
//получаем значение напряжения и тока в нагрузке
//float Ucorr = 0.00; //коррекция напряжения, при желании можно подстроить
//float Uout = analogRead(A1) * ((5.0 + Ucorr) / 1023.0) * 5.0; //узнаем напряжение на выходе
float Uout = analogRead(A1) * (5.0 / 1023.0) * 5.0; //узнаем напряжение на выходе
float Iout = analogRead(A0) / 100.00; // узнаем ток в нагрузке
//if(Iout==0.01) Iout = 0.03; else
//if(Iout==0.02) Iout = 0.04; else
//if(Iout==0.03) Iout = 0.05; else
//if(Iout==0.04) Iout = 0.06; else
//if(Iout>=0.05) Iout = Iout + 0.02;
//if(Iout>=0.25)Iout = Iout + 0.01;
//if(Iout>=1)Iout = Iout * 1.02;
/* ЗАЩИТА и выключение */
if (((Iout>(counter+0.3)*2.0) | Iout>10.0 | off) & set<4 & millis()>100 ) // условия защиты
{
digitalWrite(power, 0); //вырубаем реле
level = 0; //убираем ШИМ сигнал
digitalWrite(A4, 1);
Serial.print(‘I0;U0;r1;W0;’);
Serial.println(‘ ‘);
set = 6;
}
//Зашита от длительного максимального шим
if (level==8190 & off==false)
{
if(set<4)//если уже не сработала защита
{
maxpwm++; //добавляем +1 к счетчику
digitalWrite(A4, 1); //светим красным для предупреждения о максимальном ШИМ
}
}
else //шим у нас не максимальный, поэтому поубавим счетчик
{
maxpwm—;
if(maxpwm<0)//если счетчик дошел до нуля
{
maxpwm = 0; //таким его и держим
if(set<4) digitalWrite(A4, 0); // гасим красный светодиод. Перегрузки нет.
}
}
/* ЗАЩИТА КОНЕЦ */
// считываем значения с входа валкодера
boolean regup = digitalRead(up);
boolean regdown = digitalRead(down);
if(regup<regdown) mig = 1; // крутится в сторону увеличения
if(regup>regdown) mig = 2; // крутится в сторону уменшения
if(!regup & !regdown) //момент для переключения
{
if(mig==1) uup();//+
if(mig==2) udn(); //-
mig = 0; //сбрасываем указатель направления
}
if(mode==0 | mode==1) //если управляем только напряжением (не режим стабилизации тока)
{
//Сравниваем напряжение на выходе с установленным, и принимаем меры..
if(Uout>counter)
{
float raz = Uout — counter; //на сколько напряжение на выходе больше установленного…
if(raz>0.05)
{
level = level — raz * 20; //разница большая управляем грубо и быстро!
}else{
if(raz>0.015) level = level — raz * 3 ; //разница небольшая управляем точно
}
}
if(Uout<counter)
{
float raz = counter — Uout; //на сколько напряжение меньше чем мы хотим
if(raz>0.05)
{
level = level + raz * 20; //грубо
}else{
if(raz>0.015) level = level + raz * 3 ; //точно
}
}
if(mode==1&&Iout>Ioutmax) //режим защиты по току, и он больше чем мы установили
{
digitalWrite(power, 0); //вырубаем реле
Serial.print(‘t’);
Serial.print(2);
Serial.print(‘;’);
//зажигаем красный светодиод
digitalWrite(A4, 1);
level = 0; //убираем ШИМ сигнал
set=5; //режим ухода в защиту…
}
}else{ //режим стабилизации тока
if(Iout>=Ioutmax)
{
//узнаем запас разницу между током в нагрузке и установленным током
float raz = (Iout — Ioutmax);
if(raz>0.3) //очень сильно превышено (ток больше заданного более чем на 0,3А)
{
level = level — raz * 20; //резко понижаем ШИМ
}else{
if(raz>0.05) //сильно превышено (ток больше заданного более чем на 0,1А)
{
level = level — raz * 5; //понижаем ШИМ
}else{
if(raz>0.00) level = level — raz * 2; //немного превышен (0.1 — 0.01А) понижаем плавно
}
}
//зажигаем синий светодиод
digitalWrite(A5, 1);
}else{ //режим стабилизации тока, но ток у нас в пределах нормы, а значит занимаемся регулировкой напряжения
digitalWrite(A5, 0);//синий светодиод не светится
//Сравниваем напряжение на выходе с установленным, и принимаем меры..
if(Uout>counter)
{
float raz = Uout — counter; //на сколько напряжение на выходе больше установленного…
if(raz>0.1)
{
level = level — raz * 20; //разница большая управляем грубо и быстро!
}else{
if(raz>0.015) level = level — raz * 5; //разница небольшая управляем точно
}
}
if(Uout<counter)
{
float raz = counter — Uout; //на сколько напряжение меньше чем мы хотим
float iraz = (Ioutmax — Iout); //
if(raz>0.1 & iraz>0.1)
{
level = level + raz * 20; //грубо
}else{
if(raz>0.015) level = level + raz ; //точно
}
}
}
}//конец режима стабилизации тока
if(off) level = 0;
if(level<0) level = 0; //не опускаем ШИМ ниже нуля
if(level>8190) level = 8190; //не поднимаем ШИМ выше 13 бит
//Все проверили, прощитали и собственно отдаем команду для силового транзистора.
if(ceil(level)!=255) analogWrite(pwm, ceil(level)); //подаем нужный сигнал на ШИМ выход (кроме 255, так как там какая-то лажа)
/* УПРАВЛЕНИЕ */
if (digitalRead(13)==0 && digitalRead(12)==0 && knopka_ab==0 ) { // нажата ли кнопка a и б вместе
knopka_ab = 1;
//ah = 0.000;
knopka_ab = 0;
}
if (digitalRead(13)==0 && knopka_a==0) { // нажата ли кнопка А (disp)
knopka_a = 1;
disp = disp + 1; //поочередно переключаем режим отображения информации
if(disp==6) disp = 0; //дошли до конца, начинаем снова
}
if (digitalRead(12)==0 && knopka_b==0) { // нажата ли кнопка Б (menu)
knopka_b = 1;
set = set+1; //
if(set>5 | off) {//Задействован один из режимов защиты, а этой кнопкой мы его вырубаем. (или мы просто дошли до конца меню) //количество меню
off = false;
digitalWrite(power, 1); //врубаем реле если оно было выключено
delay(100);
digitalWrite(A4, 0); //гасим красный светодиод
Serial.print(‘t’);
Serial.print(0);
Serial.print(‘;’);
Serial.print(‘r’);
Serial.print(0);
Serial.print(‘;’);
Serial.println(‘ ‘);
set = 0;//выходим из меню
}
lcd.clear();//чистим дисплей
}
//сбрасываем значения кнопок или чего-то вроде того.
if(digitalRead(12)==1&&knopka_b==1) knopka_b = 0;
if(digitalRead(13)==1&&knopka_a==1) knopka_a = 0;
/* COM PORT */
if(currentMillis — com2 > com) {
// сохраняем время последнего обновления
com2 = currentMillis;
//Считаем Ампер*часы
ah = ah + (Iout / 36000);
Serial.print(‘U’);
Serial.print(Uout);
Serial.print(‘;’);
Serial.print(‘I’);
Serial.print(Iout);
Serial.print(‘;’);
Serial.print(‘i’);
Serial.print(Ioutmax);
Serial.print(‘;’);
Serial.print(‘u’);
Serial.print(counter);
Serial.print(‘;’);
Serial.print(‘W’);
Serial.print(level);
Serial.print(‘;’);
Serial.print(‘c’);
Serial.print(ah);
Serial.print(‘;’);
Serial.print(‘m’);
Serial.print(mode);
Serial.print(‘;’);
Serial.print(‘r’);
Serial.print(digitalRead(A4));
Serial.print(‘;’);
Serial.print(‘b’);
Serial.print(digitalRead(A5));
Serial.print(‘;’);
Serial.println(‘ ‘);
}
/* ИНДИКАЦИЯ LCD */
if(set==0){
//стандартный екран
//выводим уснановленное напряжение на дисплей
lcd.setCursor (0, 1);
lcd.print(«U>»);
if(counter<10) lcd.print(» «); //добавляем пробел, если нужно, чтобы не портить картинку
lcd.print (counter,1); //выводим установленное значение напряжения
lcd.print («V «); //пишем что это вольты
//обновление информации
/*проверяем не прошел ли нужный интервал, если прошел то
выводим реальные значения на дисплей*/
if(currentMillis — previousMillis > interval) {
// сохраняем время последнего обновления
previousMillis = currentMillis;
//выводим актуальные значения напряжения и тока на дисплей
lcd.setCursor (0, 0);
lcd.print(«U=»);
if(Uout<9.99) lcd.print(» «);
lcd.print(Uout,2);
lcd.print(«V I=»);
lcd.print(Iout, 2);
lcd.print(«A «);
//дополнительная информация
lcd.setCursor (8, 1);
if(disp==0){ //ничего
lcd.print(» «);
}
if(disp==1){ //мощьность
lcd.print(» «);
lcd.print (Uout * Iout,2);
lcd.print(«W «);
}
if(disp==2){ //режим БП
if(mode==0)lcd.print («standart»);
if(mode==1)lcd.print («shutdown»);
if(mode==2)lcd.print (» drop»);
}
if(disp==3){ //режим БП
if(mode1==0) lcd.print(«Off»);
if(mode1==1) lcd.print(«On «);
}
if(disp==4){ //максимальный ток
lcd.print (» I>»);
lcd.print (Ioutmax, 2);
lcd.print («A «);
}
if(disp==5){ // значение ШИМ
lcd.print («pwm:»);
lcd.print (ceil(level), 0);
lcd.print (» «);
}
if(disp==6){ // значение ШИМ
if(ah<1){
//if(ah<0.001) lcd.print (» «);
if(ah<=0.01) lcd.print (» «);
if(ah<=0.1) lcd.print (» «);
lcd.print (ah*1000, 1);
lcd.print («mAh «);
}else{
if(ah<=10) lcd.print (» «);
lcd.print (ah, 3);
lcd.print («Ah «);
}
}
}
}
/* ИНДИКАЦИЯ МЕНЮ */
if(set==1)//выбор режима
{
lcd.setCursor (0, 0);
lcd.print(«> MENU 1/5 «);
lcd.setCursor (0, 1);
lcd.print(«mode: «);
//режим (0 обычный, спабилизация тока, защита по току)
if(mode==0) lcd.print(«normal «);
if(mode==1) lcd.print(«shutdown «);
if(mode==2) lcd.print(«drop «);
}
if(set==2){//настройка сульфатации
lcd.setCursor (0, 0);
lcd.print(«> MENU 2/5 «);
lcd.setCursor (0, 1);
lcd.print(«DeSulfat: «);
if(mode1==0) lcd.print(«Off»);
if(mode1==1) lcd.print(«On «);
}
if(set==3){//настройка тока
lcd.setCursor (0, 0);
lcd.print(«> MENU 3/5 «);
lcd.setCursor (0, 1);
lcd.print(«I out max: «);
lcd.print(Ioutmax);
lcd.print(«A»);
}
if(set==4){//спрашиваем хочет ли юзер сохранить настройки
lcd.setCursor (0, 0);
lcd.print(«> MENU 4/5 «);
lcd.setCursor (0, 1);
lcd.print(«Reset A*h? ->»);
}
if(set==5){//спрашиваем хочет ли юзер сохранить настройки
lcd.setCursor (0, 0);
lcd.print(«> MENU 5/5 «);
lcd.setCursor (0, 1);
lcd.print(«Save options? ->»);
}
/* ИНДИКАЦИЯ ЗАЩИТЫ */
if(set==6){//защита. вывод инфы
lcd.setCursor (0, 0);
lcd.print(«ShutDown! «);
lcd.setCursor (0, 1);
lcd.print(«Iout»);
lcd.print(«>Imax(«);
lcd.print(Ioutmax);
lcd.print(«A)»);
level=0;
Serial.print(‘I0;U0;r1;W0;’);
Serial.println(‘ ‘);
}
if(set==7){//защита. вывод инфы критическое падение напряжения
Serial.print(‘I0;U0;r1;W0;’);
digitalWrite(A4, true);
Serial.println(‘ ‘);
level=0;
lcd.setCursor (0, 0);
if (off==false){ lcd.print(«[ OVERLOAD ]»);
lcd.setCursor (0, 1);
//и обьясняем юзеру что случилось
if((Iout>(counter+0.3)*2.0) | Iout>10.0){
Serial.print(‘t’);
Serial.print(1);
Serial.print(‘;’);
lcd.print(» Iout >= Imax «);
}
}else{
lcd.print(«[ OFF ]»);
lcd.setCursor (0, 1);
Serial.print(‘t’);
Serial.print(4);
Serial.print(‘;’);
}
}
}