Здесь рассмотрим как настроить самый популярный GPS модуль u-blox NEO-6M. Даже если на сайте продавца написано, что модуль подходит для APM, то не факт, что в нем загружены верные настройки, поэтому нам необходимо сделать эту процедуру.
Вот так выглядят модули с RCTimer.com и MyAirBot.com:


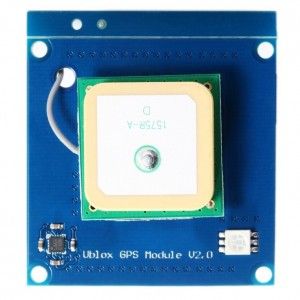

На данных модулях GPS кроме самого модуля имеется flash-память для хранения настроек, конвертер логических уровней и стабилизатор питания 3.3В. На некоторых модулях конвертера может не быть, но память везде быть обязана! Если ее нет, то можно смело искать другой модуль. На модуле от MyAirBot.com на борту еще имеется внешний компас и светодиод для индикации 3D-fix.
Для настройки конфигурации нам понадобится:
1) Переходник USB-COM, например на микросхеме FT232RL (может быть и другой), который мы использовали для прошивки загрузчиков ATMega32u2 и ATMega2560.
2) Программа U-Center. Можно скачать с официального сайта по ссылке.
3) Конфигурационный файл с настройкой для APM. Скачиваем здесь. В архиве еще имеются сохраненные мной конфигурационные файлы.
Производим подключение переходника COM и модуля NEO-6M в соответствии с: VCC-VCC, GND-GND, RX-TX, TX-RX.

Подключаем разъем USB переходника в ПК, устанавливаем по необходимости драйвер, в диспетчере устройств смотрим, какой назначился порт для переходника.
Устанавливаем программу U-Center на ПК, запускаем.
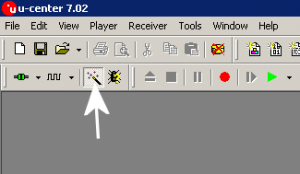
Нажмите кнопку с «волшебной палочкой» для установки автоматической скорости порта.
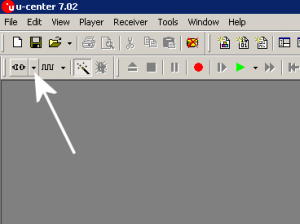
Выберите порт, который появился при подключении переходника.
После подключения в нижней части окна должны увидеть зеленый значок, это значит что модуль успешно подключился.
![]()
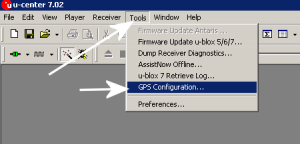
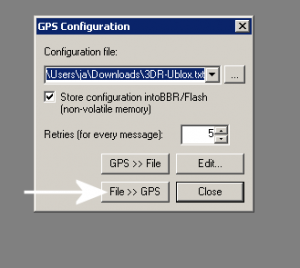
Нажимаем меню «Tools», «GPS Configuration» (GNSS Configuration в свежих версиях программы).
Выбираем конфигурационный файл «3DR-Ublox.txt» и в окне диалога нажимаем «Open». Ставим галку «Store configuration into BBR/Flash».
Нажимаем кнопку «File >> GPS».
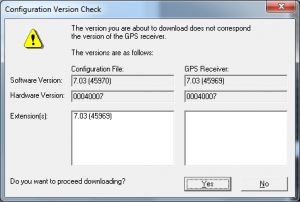
Появится окно с предупреждением о несоответствии версий конфигураций, где надо нажать «Yes» (если слева в колонке версия не отображается, то необходимо сбросить настройки модуля на стандартные. Для этого нажимаем меню «Receiver — Action — Revert Config», после чего пробуем загрузить настройки снова).
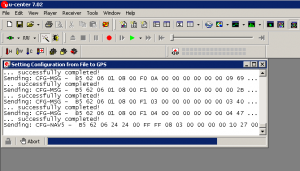
Далее начнется процесс загрузки конфигурации в модуль, о чем будет свидетельствовать движение индикатора прогресса. Если окно исчезло, значит все загрузилось, иначе отобразятся ошибки. Пробуем еще раз.
Раньше до заливки конфигурационного файла мы могли видеть цветные квадратики, полоски в окне спутников, а теперь их нет. Это нормально!
Чтобы успокоиться и посмотреть данные спутников, необходимо нажать кнопку «Debug».
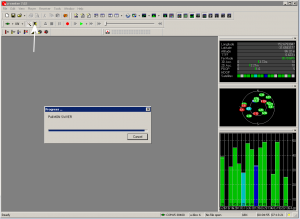
Теперь полоски могут долго не появляться из-за того, что после загрузки конфигурации был произведен холодный старт модуля. Модуль должен заново получить данные от спутников, чему могут мешать естественные и искусственные объекты и т.д. Теперь просто ждем. Ждать можно долго, но обычно продохит 5-10 минут и данные начинают появляться. Модуль в этот момент лучше разместить у окна. Постепенно появится больше и больше данных.

В параметрах необходимо проверить параметр TP и настроить его. Цитирую Артема:
За моргание светодиода отвечает пункт TP (Timepulse), в выпадающем списке справа надо поставить «+1 risisng edge» и нажать внизу Send, чтоб настройка прописалась. Светодиод вновь радует глаз при 2D/3D Fix.
На данном этапе настройка модуля завершена и далее можно переходить к подключению.
Также можно воспользоваться другим способом настройки, используя плату APM в качестве связующего звена между ПК и модулем GPS. Для этого необходимо загрузить особую прошивку «APM2 / Ublox passthrough» на плату, которая качается по ссылке (+ прямая ссылка) и загружается через Mission Planner. ВНИМАНИЕ! Летная прошивка стирается и, после процедуры настройки модуля, необходимо опять загрузить летную прошивку, а так же произвести все настройки с нуля.
Ниже представлено видео данного процесса использования контроллера APM для настройки модуля GPS.
Update 15.06.2014:
Описание загрузки конфигурационного файла через контроллер APM.
Сергей Макаров:
Давайте с самого начала:
ПРОШИВАЕМ ЧЕРЕЗ APM:
Открываете среду Ардуино, в свойствах выбираете плату и порт.
Открываете пример: Файл -> Примеры -> Communication -> MultiSerialMega.
Жмете кнопку «Загрузить». APM теперь просто транслятор сигналов на скорости 9600.
Идете в U-Centre, загружаете конфиг, получаете ошибку, игнорируете.
Открываете среду Ардуино, в свойствах выбираете плату и порт.
Открываете пример: Файл -> Примеры -> Communication -> MultiSerialMega.
Редактируете две строчки:
Serial.begin(38400);
Serial1.begin(38400);
Жмете кнопку «Загрузить». APM теперь просто транслятор сигналов на скорости 38400.
Идете в U-Centre, меняете скорость на 38400, загружаете конфиг, уже не получаете ошибку, радуетесь.
Что может быть проще?
PS ну настройки APM ведь сохранили? Прошиваем любимую прошивку и восстанавливаем настройки только ручками!
Update 25.06.2014: Добавил ссылку на архив с конфигурационными файлами.
Update 11.08.2014: Видеоинструкция от Юлиана.
Update 14.11.2014: По просьбе Сергея добавил информацию от Артема по поводу параметра отображения 3D Fix светодиодом.
Update 25.05.2015/02.06.2015: Информация от Андрея об модуле ublox neo-m8n.
Развернуть
Приобрёл на Али Экспресс недавно за сумму около 50-ти американских енотов.
GPS-приёмник ublox neo-m8n для Pixhawk (и как было написано у продавца — для APM). У меня же — модуль APM 2.6.
Во-первых, пришлось перенести один пин в правую сторону, поскольку разъём приёмника — 6-пиновый, а на GPS-разъёме APM — 5 пин. Вскрытие самого модуля GPS с целью выяснения распиновки разъёма эффекта не дало — на плате приёмника они не обозначены вообще, присутствует только маркировка элементов.
Подключение к APM велось в соответствии с цветовой маркировкой проводников, идущих от разъёма приемника к APM, а точнее — кроме переноса проводника черного цвета на один пин вправо (в сторону проводника красного цвета+5В) и укорачивание самого разъёма приёмника на этот же один пин с помощью лезвия — с целью воткнуть его в APM, что в результате и было сделано.
После подачи питания на APM по USB модуль весело засветился зелёным цветом, что для начала-порадовало. Далее хотелось выяснить, выполняет ли приёмник свои функции по предназначению, имея в виду то обстоятельство. что на плате приёмника при осмотре было установлено наличие ещё одного светодиода — синего свечения, индицирующего наличие захвата спутников и функционирование в режиме 3DFIX.
Я живу на перовм этаже пятиэтажного дома, балкон — зарешёчен, рядом от моего дома на дистанции 30 метров — соседний пятиэтажный дом аналогичной постройки и приличное количество распускающихся деревьев, что делало задачу нормального функционирования приёмника маловероятной. Однако после вынесения приёмника сантиметров на 10-15 за пределы решётки, закрывающей балкон минуты через полторы на правом борту приёмника весело включился и замигал синий светодиод, подтверждающий 3D FIX. Запуск Mission planer и последующее подключение к нему APM мои предположения подтвердили, координаты и точка моего местонахождения были означены на карте с точностью, достойной всяческого уважения — учитывая место и условия расположения приёмника.
Дальнейшая заливка файла конфигурации в приёмник в U-center через APM после установки на последний кастомной прошивки оказалось делом несложным и быстрым.
Хотелось бы отметить следующие моменты:
— модуль оказался на редкость -беспроблемный, весьма точный и обладающий высокой чувствительностью.
— При заливке файла конфигурации в приёмник необходимо установить скорость порта в программе U-center, равную 38400, установить соединение на этой скорости и обязательно добиться чтобы приёмник увидел спутники и начал выдавать навигационную информацию. после этого заливка конфигурации с сайта APM не вызовет никакой проблематики.
Программа U-center является инструментом, позволяющим проводить практически ЛЮБЫЕ настройки самого модуля GPS. Если с ней хорошо разобраться. При установлении прошивки с сайта APM просмотрщиком конфигурации в U-center следует убедиться в том, что установлены — порт, скорость порта, скорость выдачи навигационной информации, а также — включение бинарного протокола UBX и отключение протокола NMEA выдачи навигационных данных. Хочу повторить, что внимательное изучение программы U-center позволит Вам конфигурировать приёмники UBLOX вручную, добиваясь максимально эффективной работы с APM.
Удачи Вам!
Практические моменты при выборе GPS — приёмника.
Доброго всем времени суток!
Описывая настройки gps-приёмника на базе ublox neo-m8n (и всё что с ними связано) возникают следующие наблюдения:
— как и в случае со всеми жизненными ситуациями, при комплектации Вашей конструкции приёмником GPS имеет место извечно актуальная проблема …выбора.
Дело в том, что на форумах и в постах присутствует мнения многих пользователей приёмников подобного рода, выбор которых, мягко говоря, для них самих же не является однозначным очевидным. Я постараюсь пояснить эти строчки. С моей точки зрения, при выборе GPS- приёмника имеет смысл руководствоваться следующим:
— производитель набора микросхемe приёмника должен быть достаточно известным в своей среде и иметь (для начала) положительные отзывы об использовании своих изделий.
-Далее — на сайте производителя для удобства и работы специалистов и рядовых пользователей должна иметься исчерпывающая соответствующая документация.
— также на сайте производителя обязательно должны быть программный инструментарий, позволяющий пользователю комфортно работать с выбранным изделием данного производителя.
При выборе навигационного приёмника Вы должны понимать, что, рекламируя свои новинки, производитель тем самым демонстрирует свою последовательность в данном направлении и желание выпустить модель, учитывающую недостатки предыдущей и стремление к совершенствованию.
С моей точки зрения, изделия UBLOX этим критериям вполне соответствуют. Это -европейский производитель и один из лидеров в данном направлении. Он обладает и серьёзным качественным производственным потенциалом и необходимой программной и прочей поддержкой своих изделий.
Далее идёт более приземлённая сторона вопроса. Всё дело в том, что подавляющее большинство GPS-приёмников из этих наборов микросхем собирается в широко известной нам стране и тайны из этого мы давно уже не делаем, поскольку сей факт нас вполне устраивает. То есть, как говорит мой родственник, периодически бывающий в местах производства этой электроники: -… кока-кола в баре может быть и американской, а вот лёд в ней — из ближайшего к бару канала рисового чека. С последующими выводами… Что следует из написанного мной? Перед покупкой приёмника внимательно собирайте статистику по отзывам на сайтах продавца, и на форумах.
Не жалейте 300 рублей на покупку дешевенького китайского цифрового мультиметра, небольшой отвертки и ресурсов терпения в 15 минут на исследования внутренностей приобретённого Вами GPS-приёмника на предмет наличия контакта от разъёма модуля на плате приёмника до разъема, предназначенного для включение в рейс-контроллер. Даже если Вы хронически не ладите с электроникой, всё не так уж сложно:
На одном из разъёмов будут чёрный и красный провода — это земля (GND) и плюс +. Напряжение питания — соответственно. Между ними — оставшаяся пара RX — TX, которые, в случае нежелания приёмника дружить с рейс-контроллером при выборе порта и установлении его скорости в 38400 бит, всегда возможно с поменять местами с помощью пинцета и иголки. Оставшиеся два проводка на отдельном разъеме, как Вы догадываетесь, — это I2C — интерфейс компаса. После того, как рейс -контроллер увидел Ваш приёмник, постарайтесь путём несложных манипуляций подключиться к программе U-center и с помощью просмотрщика уяснить состояние основных настроек приёмника. Возможно, после этого заливать файл конфигурации Вам не понадобится.
Многочисленные диспуты на тему работы одновременной GPS-приёмника с несколькими навигационными группировками вызывают у меня некоторый интерес, но не более того. Мой ublox neo-m8n декларирует готовность видеть практически ВСЕ существующие навигационные группировки,(и видит их) но выдаёт навигационные данные пока только по сигналам GPS в протоколе UBX.
Хочется в этой связи отметить отдельно, что в случае для Ublox конфигурация модуля в программе U-center позволяет осуществлять конфигурацию рабочих протоколов приёмника раздельно и на приём, и на выдачу навигационных данных- соответственно. (Задумайтесь на досуге — зачем?)
В случае необъяснимой тяги к экспериментам по одновременному приёму сигналов двух и более навигационных спутниковых группировок с моей точки зрения, более предпочтительна платформа Pixhawk, позволяющая корректно практически подключить два навигационных приёмника к одному рейс-контроллеру. А с особенностями их совместной работы Вам придётся разбираться…, но скорее всего — уже самостоятельно…
В качестве практического наблюдения имею возможность сообщить, что приём сигналов в разное время суток даёт реально различные результаты. Приём в вечернее и тёмное время суток, даже в условиях плотной облачности — более уверенный. Во всяком случае для выбранной мной модели приёмника ublox neo-m8n.
Попытаюсь написать короткое резюме по поводу прочитанного и написанного:
— Во- первых, на одном и том же наборе микросхем одного производителя GPS – ресиверы собираются почему-то СОВСЕМ НЕ ОДИНАКОВЫЕ…
— Обобщать по поводу изделий Ublox я не собираюсь в принципе, как минимум по одной причине, которую указал пунктом выше. Но считаю, что если в линейке этого производителя появился ресивер генерации M8, то выпуск этого изделия не обусловлен исключительно переводом производственных мощностей на новый техпроцесс для снижения энергопотребления в целях последующего увеличения времени автономной работы. Однозначно присутствуют и другие — более важные конструктивные особенности, – но это вовсе не означает, что эти самые особенности ДЛЯ Вас будут и наглядны и очевидны…
— Протокол NMEA – никогда не был абсолютным злом (во всяком случае я этого не писал). Но включенный одновременно с UBX доставит Вам не мало вопросов перед тем, как ваш коптер научиться держать фиксированную GPS – позицию. В программе U-center имеется на этот случай соответствующий пункт, позволяющий ресиверу адекватно воспринимать как один и другой протокол (или же оба — совместно) поступающие на вход ресивера, так и с лёгкостью выбирать тот из них, который представляется Вам наиболее актуальным для дальнейшего применения.
— Если сам APM имеет все легальные частоты работы шины, которые указываются в выборе возле доступного Вам порта, то ресивер имеет значения, хранящиеся в его настройках ПО УМОЛЧАНИЮ (9600) или же ВЫБИРАЕМЫЕ ВАМИ и устанавливаемые как РАБОЧИЕ из тех, которые будут функциональны при его подключении к APM. Автовыбор частоты не всегда работает корректно и об этом уже неоднократно упоминалось.
Подключение и конфигурация ресивера через FTDI – переходник имеет свои особенности и может (после переподключения сконфигурированного приёмника к APM) Вас удивить, а что ещё более вероятно – озадачить.
“Выбор частоты обновления прямо пропорционален baud rate.” Вывод мной комментироваться не будет. Считаю что было бы уместным предположить, что в случае с NEO M8N частота обновления актуальна НЕ ТОЛЬКО ДЛЯ ОПТИМАЛЬНОЙ РАБОТЫ С APM. Если есть желание разобраться с настройками и протоколами – сохраните Ваши текущие настройки в файл, сбросьте настройки ресивера в дефолтные и попытайтесь проанализировать просмотрщиком конфигурации состояние этих настроек.
В качестве дополнения хочу напомнить один из комментариев, смысл которого заключался в том, что APM вполне удачно взаимодействует с приёмником, над которым не производилось ВООБЩЕ НИКАКИХ МАНИПУЛЯЦИЙ по его конфигурированию. И коптер практически держит позицию в соответствующем режиме. Кстати. Речь шла о приёмнике Ublox генерации M8…
Update 02.06.2015: Информация от Ильи об модуле ublox neo-m8n.
Развернуть
Хочу отметить, что я в коптероводстве недавно, а уж с GPS вообще никогда никак связан не был совсем. Так что всё, что я здесь пишу — исключительно личный опыт (и некоторое количество гугления)
Отвечу всем — и, надеюсь, надолго для себя закрою тему)
*у меня 3.2.1 — но, наверное, не суть*
1.
3. Все пишут, что в 3.2 NMEA нет. Люди специально компилируют кастомные прошивки с NMEA.
Вот, собственно, я так же думал.
пока не получил по недосмотру м8н БЕЗ ЕЕПРОМ, жёстко сконфигурированный на NMEA 9800. И коптер — висел в точке! а значит, либо верно Ваше понимание того, что APM полностью конфигурирует ublox, вплоть до протоколов — либо….мозги понимают NMEA
в пользу своей точки зрения добавлю, что сейчас у меня нормальный м8н сконфигурирован на вывод Ublox+NMEA (дефолтная установка), но я добился, что в u-centre отображается стабильный NMEA без прерываний на UBX.
И, опять же, когда у меня был сконфигурирован вывод только UBX, коптер улетал в Россию.
Насколько я понимаю, всё это вкупе свидетельствует о том, что всё же коптер опирается на NMEA
Или же включение дополнительно NMEA как-то влияет на восприятие коптером UBX…но это за гранью моего понимания.
2. SBAS, кстати, по мнению некоторых, негативно влияет на точность (и барометр)
Точность — да, барометр — не знаю. Но сейчас заметил, что коптер иногда необъяснимо теряет высоту на метр, а потом возвращается. Может, вы и правы с преконфигурацией апм……
3.
Считаю что было бы уместным предположить, что в случае с NEO M8N частота обновления актуальна НЕ ТОЛЬКО ДЛЯ ОПТИМАЛЬНОЙ РАБОТЫ С APM
. нет-нет, и я так тоже не считаю.
Я лишь заметил, что повышение частоты обновления при неизменно низкой скорости порта — в какой-то момент приводит к пропускам пакетов — или, даже, регулярному выпадению спутников на долю секунды.
В связи с чем, рекомендую обратить на это внимание тем, кто будет играть с частотой обновления.
Мне это наблюдение позволило получить 4ГЦ и стабильный поток пакетов без прерывания. Всё.
Если честно, я по горло сыт мучениями с GPS вместо полётов, — так что, думаю, флаг будет нести кто-то другой.
*а вот по поводу сохранения настроек, буду признателен
Потому как у меня при выборе Save GNSS вечно вылезали таймауты по ВСЕМ параметрам. Или по части.
А action — save config — я так и не понял, работает ли — и если да, то куда сохраняет.
Если вы нашли ошибку на странице, то нажмите Shift + Enter или нажмите здесь, чтобы уведомить нас.
GPS-приемники для квадрокоптеров
Братцы, есть omnibus f4 pro inav и gps radiolink t100. Ситуация: после распайки подключения все быстро поймал пофиксил и т.п. Отключил, дособрал коптер — тишина! День тишина другой тишина. 😉 В сообщениях кидает только последние координаты и остальное нулями. Ну, думаю, чето опять спалил глючный омнибас. Купил ещё один модуль, подключился быстрее первого и спутники все нашёл. Ну я обрадовался. Но до первого ребута. После перезагрузки огонёк то горит, да фикс не кажет. Поставил ucenter, вижу что иногда видет по одному спутнику. Один раз мелькнуло даже пяток.
Вопрос, какие ошибки посмотреть, где питалово померять или какой для омнибаса есть надёжный gps, чтобы проблем не знать? Кстати, компас работает на нем. Разводил через гнездо, может стоит попробовать на прямую перепаять?
может стоит попробовать
Стоит пробовать не покупать гомно, например омнибасы или радиолинки…
- Проверить что выдает встроенный стаб на 3,3В. на модуле.
- Сдуть его и принудительно подать на выход (пятак) стаба 3,3В. и потестить в Уцентре.
Почитать данную тему в разрезе подбора качественных модулей.
Стоит пробовать не покупать гомно, например омнибасы или радиолинки…
- Проверить что выдает встроенный стаб на 3,3В. на модуле.
- Сдуть его и принудительно подать на выход (пятак) стаба 3,3В. и потестить в Уцентре.
Почитать данную тему в разрезе подбора качественных модулей.
Запоздалое но ценное предложение про не покупать) Первый квадр и первый пояльник, что в ютьюбе советовали я то и взял).
Сдуть попробую. Только наверно новый сразу куплю помощьнее на вход
Стоит пробовать не покупать гомно, например омнибасы или радиолинки…
- Проверить что выдает встроенный стаб на 3,3В. на модуле.
- Сдуть его и принудительно подать на выход (пятак) стаба 3,3В. и потестить в Уцентре.
Почитать данную тему в разрезе подбора качественных модулей.
Вход 4.4В, выход 3.3В. Это ведь похоже, что с ним все норм(хотя в чип дип уже купил пару новых)?
В u-center много ошибок 13:39:34 ERROR: txbuf alloc. Может дело в этом. Где нибудь буфер у GPS настраивается?
omnibus f4 pro inav и gps radiolink t100.
Скажем так -тут наверно каждое второе сообщение с проблемами про эти TS100.
Люди ищут приключения на …??
Чем плохи обычные 880ые или 180ые 220ые без компаса? Или 50 спутников думают поймать??
Поменяйте для пробы на обычный жпс.( китай омнибасы 3й…4й…никогда не имел проблем с gps. С бэками -это да . эти TS100 на фиг мне не нужны)
В u-center много ошибок 13:39:34 ERROR: txbuf alloc.
Возможно низкая скорость порта и высокая частота опроса. Попробуйте 57600/5 Гц и только протокол NMEA.
Возможно низкая скорость порта и высокая частота опроса. Попробуйте 57600/5 Гц и только протокол NMEA.
Короче, свершилось чудо!!! Т.е. не объяснимое.
Переложил провод и все работает и за 5 сек. фиксится. Ранее он пролегал над ПК, теперь сделал сбоку. Объяснить не могу. Порт до этого трогал всячески.
Могут быть такие наводки?
Могут быть такие наводки?
Могут быть наводки от приемника или VTX. Провода, надеюсь, скручены в косичку.
Коллеги! подскажите плиз, на какой модуль ЖПС можно поменять родной назовский? Грешу, что GPS модуль от naza m v1 (прошитая до в2) глючить стал. Какой модуль можно посмотреть и поставить? Или поменять внутреннюю антенну керамическую на 4мм толщиной или поставить Ublox NEO-M8N для назы. Что эффективнее будет? Спасибо
У Назы свой протокол для GPS, это нужно иметь ввиду. По мне вернее было бы поставить Ublox NEO-M8N для назы.
Скажем так -тут наверно каждое второе сообщение с проблемами про эти TS100.
Люди ищут приключения на …??
Чем плохи обычные 880ые или 180ые 220ые без компаса? Или 50 спутников думают поймать??
Поменяйте для пробы на обычный жпс.( китай омнибасы 3й…4й…никогда не имел проблем с gps. С бэками -это да . эти TS100 на фиг мне не нужны)
Я тоже это думал, но так понимаю, компас нужен для показа в ОСД стрелки(домой).
Или все это работает на обычных жпс без компаса?
на самолёте работает, на коптере нет
Всем привет! Проблема настройки air-hobby.ru/…/2923-modul-gpscompass-bn-880.html такого GPS приемника. До сброса настроек по умолчанию была скорость 38400.Спутники ловит , а вот уставку скорости и время опроса не меняется. Хотел поставить 38400 и опрос 200ms вообще никак не реагирует , так и остается по умолчанию 9600 и 1000ms(send нажимал). Что может быть , может, прошивку поменять ? Есть у кого нибудь прошивка под этот модуль?
У меня были такие модули с любыми прошивками штук 10, проблем с настройками никогда не было. Прошивки тут не причем.
У меня были такие модули с любыми прошивками штук 10, проблем с настройками никогда не было. Прошивки тут не причем.
Странно, у меня 1й и такая лажа, даже не знаю куда копать. Как будто работает только на передачу, типо защита от записи , что ли на нем стоит
А вы запись точно делаете? Для этого Send недостаточно.
А вы запись точно делаете? Для этого Send недостаточно.
Когда я Send делаю ничего не меняется , как передавал данные с 1000ms так и после send ничего не изменилось. Save current configuration — тоже делал , ничего не записывается. Напряжение на батарейке 0в.
Снял экран с BN-880: M8030-KT, FT25H04 (512kb).
Разобрался ,китайцы плохо пропаяли 8030 чип. Прогрел его и все ок стало.
bn-280, хапнул вольт 16 по питанию, убит.
есть смысл париться и сдувать экран, или там все убито?
Recommend Projects
-

React
A declarative, efficient, and flexible JavaScript library for building user interfaces.
-
Vue.js
🖖 Vue.js is a progressive, incrementally-adoptable JavaScript framework for building UI on the web.
-
Typescript
TypeScript is a superset of JavaScript that compiles to clean JavaScript output.
-
TensorFlow
An Open Source Machine Learning Framework for Everyone
-
Django
The Web framework for perfectionists with deadlines.
-
Laravel
A PHP framework for web artisans
-
D3
Bring data to life with SVG, Canvas and HTML. 📊📈🎉
Recommend Topics
-
javascript
JavaScript (JS) is a lightweight interpreted programming language with first-class functions.
-
web
Some thing interesting about web. New door for the world.
-
server
A server is a program made to process requests and deliver data to clients.
-
Machine learning
Machine learning is a way of modeling and interpreting data that allows a piece of software to respond intelligently.
-
Visualization
Some thing interesting about visualization, use data art
-
Game
Some thing interesting about game, make everyone happy.
Recommend Org
-
Facebook
We are working to build community through open source technology. NB: members must have two-factor auth.
-
Microsoft
Open source projects and samples from Microsoft.
-
Google
Google ❤️ Open Source for everyone.
-
Alibaba
Alibaba Open Source for everyone
-
D3
Data-Driven Documents codes.
-
Tencent
China tencent open source team.