Содержание
- CNC Lathe стойка Fanuc Oi
- #1 OFFLINE Fart123
- #2 OFFLINE T-Rex
- #3 OFFLINE Fart123
- #4 OFFLINE vv92
- #5 OFFLINE ShadowVoice
- #6 OFFLINE T-Rex
- #7 OFFLINE 2ar
- #8 OFFLINE T-Rex
CNC Lathe стойка Fanuc Oi
#1 OFFLINE Fart123


- Пол: Мужчина
- Из:Самара
Добрый день! Сломался станок CNC Lathe CKE6136z. Fanuc Oi Mate -TD Станок не запускается и выдает ошибки:Ex1002 MOTOR OVERLOAd, Ex1001 TRANSDUCER ALARM, EX 1000 EMERGENCY STOP. Подскажите,что с ним может быть? Операторы говорят, ошибки появились после перепада напряжения.
#2 OFFLINE T-Rex

- Пол: Мужчина
- Из:Йошкар-Ола
Станок не запускается и выдает ошибки:Ex1002 MOTOR OVERLOAd, Ex1001 TRANSDUCER ALARM, EX 1000 EMERGENCY STOP. Подскажите,что с ним может быть? Операторы говорят, ошибки появились после перепада напряжения.
Вы хотя бы немного в индустриальной электронике разбираетесь? Или рассчитываете, что на форумах «телепатически» определят причину неисправности и напишут вам пошаговое руководство по ее устранению, вплоть до порядка откручивания проводов от клемм?
По совокупности ошибок — вполне вероятно, что один из приводов (шпиндель, координатные оси) неисправен. При этом, поскольку схема его управления не дает сигнала «исправен, готов к работе», вполне может активироваться «E-Stop» (зависит от схемы конкретного станка).
В общем, откройте электрошкаф и внимательно осмотрите. А то, может быть, просто какой-нибудь из защитных токовых «автоматов» при броске выбило. Если выбило, попробуйте включить. Выбьет повторно — тогда уже неисправность искать.
#3 OFFLINE Fart123
- Пол: Мужчина
- Из:Самара
Я не рассчитываю что мне телепатически помогут. Я спрашиваю, потому что может кто-то уже сталкивался с такой именно проблемой, именно на таком станке. А то что нужно проверить автоматы это понятно.И, уважаемый T-Rex, я вот не понимаю, зачем вообще писать на что я надеюсь и учить. Можно просто ничего тогда не писать.
#4 OFFLINE vv92

- Пол: Мужчина
- Город: Н.Новгород
- Из:Н.Новгород
Если уважаемый Дино перестанет здесь писать, мы много потеряем. Вам не понять-детские обиды, чё.
#5 OFFLINE ShadowVoice
- Пол: Мужчина
- Город: Рига
- Интересы: Деньги, власть, женщины. Последовательность можно менять.
- Из:Рига, Латвия
1. Dino более чем прав.
2.вариант — изучайте свой PCSи пытайтесь понять последовательность каких событий приводит к указанным ошибкам.
3. Даже внешне 100% похожие станки с одинаковой стойкой очень часто имеют разные PLS. Вами дано ОЧЕНь мало информаци для хоть приблизительной диагностики, а с телепатами в мире напряжёнка.
4. Задать вопрос производителю станка — не судьба?
#6 OFFLINE T-Rex
- Пол: Мужчина
- Из:Йошкар-Ола
А то что нужно проверить автоматы это понятно.
Ну и что помешало проверить сразу всё, что доступно при визуальном осмотре (например, состояние сервоусилителей и индикацию на их панелях), на предмет выявления «чего-то неправильного», и сообщить, что ещё увидели? Если хотите «гадание на кофейной гуще по материалу заказчика» устроить, несите не одно зернышко кофе, а хотя бы малую горсточку.
Я спрашиваю, потому что может кто-то уже сталкивался с такой именно проблемой, именно на таком станке.
Ну давайте допустим, что нашли вы собрата по несчастью. У которого на таком же станке сгорел сервоусилитель стоимостью несколько тысяч долларов. А у вас всего-навсего автомат питания отбило, без более тяжких последствий. И что, будете, как он, новый «сервопак» заказывать и менять, вместо того, чтобы автомат обратно включить?
Вы таки поймите, это станки. Сложно устроенные аппараты. Но при этом не айфоны, не робопылесосы и прочие гаджеты, выпускаемые массовым тиражом. Бесполезно к ним «списки типовых неисправностей» составлять — при ремонте техники, тираж производства которой измеряется десятками-сотнями, максимум тысячами, а не миллионами, совсем иные методы диагностики действуют. «Ремонт по аналогии» там либо не дает результата, либо приводит к многократно увеличенным затратам денег.
Даже внешне 100% похожие станки с одинаковой стойкой очень часто имеют разные PLS.
Стойки-то одной модели, а вот программа PLC, управляющая электроавтоматикой, у каждого своя. И даже в двух станках одной марки она может различаться, если они в разной комплектации с завода вышли.
вариант — изучайте свой PCSи пытайтесь понять последовательность каких событий приводит к указанным ошибкам.
Это на случай полнейшей «безблагодатности», когда иного пути нет — документация на станок утрачена, производитель уже не существует (либо отказывается консультировать по каким-то причинам), а станок починить надо любой ценой. «Реверс-инжиниринг черного ящика» — трудоемкое занятие, требующее высшей квалификации от наладчика. В абсолютном большинстве случаев при диагностике и ремонте индустриальной автоматики можно и без него обойтись.
#7 OFFLINE 2ar

- Пол: Мужчина
- Город: Новосибирск
- Интересы: Сервисное обслуживания станков
- Из:Новосибирск
зачем вообще писать на что я надеюсь и учить.
Я вижу у вас полно свободного времени, чтобы здесь писать. Когда я работал на линии розлива, то в подобных случаях не было времени писать на форумах. Нужно было решить любую КИПовскую неисправность за 15 минут. Далее шли звонки начальникам по восходящей. А тут ему советы дают и он при этом не доволен.
#8 OFFLINE T-Rex
- Пол: Мужчина
- Из:Йошкар-Ола
Fart123, Давайте-ка, я вам вводный урок по вивисекции и реанимации промышленного оборудования устрою.
Я (сервисник-наладчик), в количестве 1 штука.
Агонизирующий станок (ваш CKE6136z — впервые в жизни его увидел, и даже не знал до сих пор, какого он цвета, серого или зеленого) — 1 штука.
Смотрю на дисплей стойки. Вижу там ошибки:
Ex1002 MOTOR OVERLOAd
Сигнал о перегрузке какого-то из приводных моторов. Пока весьма обобщенно. Может быть отбитый автомат или сработавшее тепловое реле. Либо это сигнал о том, что данный привод вполне исправен сам по себе, но остановлен из-за механической перегрузки (не отпускаются тормозные колодки, заклинился разрушенный подшипник, «нога попала в колесо» и т.п. — принимаем или отметаем эти версии). Либо силовая электроника, управляющая данным приводом, испустила из себя «волшебный синий дым». Ну и неисправность мотора (пробой обмоток на корпус, либо КЗ витки) тоже не исключается.
Ex1001 TRANSDUCER ALARM
Ooops. В совокупности с предыдущей ошибкой — как-то не радует. Если «transducer» (датчик положения оси — обычно это резольвер, или абсолютный энкодер, или «линейка», хотя может быть и простой тахогенератор, если токарный шпиндель не «индексный») передает сигнал в стойку не напрямую, а через сервоусилитель привода (работающий в качестве повторителя или преобразователя сигнала) — немалая вероятность, что у нас именно этот сервоусилитель сдох. Отсюда и данный аларм — стойка получает от датчика какой-то бред вместо вменяемых значений, и не знает, в каком реальном положении находится приводная ось).
Ну всё, где у вас ключ от замка электрошкафа лежит? Пора туда заглянуть. Заодно тащите альбом схем станка (электрических, пневматических и гидравлических), он мне наверняка пригодится. Да и руководство по эксплуатации хотелось бы бегло пролистать — нередко в нем имеется расшифровка тех ошибок, причины которых могут быть обнаружены и устранены самим оператором, без вызова «специально обученного» человека.
EX 1000 EMERGENCY STOP
А про это уже сказал. «Вторичная ошибка». Любой вменяемо сконструированный ЧПУ-станок, «потеряв» управление одной из осей и не зная, в каком положении она находится, обязан пресечь любые дальнейшие движения. Либо, как вариант, сильно их ограничить, чтобы предотвратить взаимные столкновения и возможные повреждения механизмов. Скорее всего, она самоустранится, когда первичную неисправность найдем и ликвидируем.
Сообщение отредактировал T-Rex: 02 Май 2017 — 14:25
Источник
Автор:
basilcat · Опубликовано: 26 минут назад
Посмотрите вот это, может подойдёт, все инструкции по работе в папке doc:
Система автоматизации программирования SAPR предназначена для подготовки управляющих программ для машин тепловой резки с системами ЧПУ. Система является полностью автономной программой, не требующей никакой другой поддержки кроме WinXP, Win 7, Win10. Все файлы системы должны находиться в одном каталоге. Инструкция по установке в папке doc. Файлы примеров программ *.sr, *.srt, *.tex, *.geo, *.esi лучше хранить в других каталогах. Есть возможность работать с DXF файлами (стандарт «Autodesk AutoCAD 2004» и «SolidWorks 2001 FINAL» или КОМПАС v9-15). Инструкция по работе с системой в папке doc. Добавлены новые возможности: раскладка деталей произвольной формы на ЛИСТЕ произвольной формы (на остатке листа от предыдущих раскроев). Добавлены функциональности в ПО.
Назначение: Система автоматизации программирования SAPR предназначена для подготовки управляющих программ для машин тепловой резки с системами ЧПУ. В графическом режиме технологом строится программа, описывающая конфигурацию детали, режимы и последовательность вырезки ее на станке. Эта программа называется исходной программой. Каждая программа имеет свое уникальное имя — номер чертежа детали. Исходная программа описывает обработку конкретной детали для конкретной машины, но часто в программе приходится описывать одни и те же элементы, применять одни и те же элементы. В этом случае можно составить подпрограммы, ориентированные на обработку повторяющихся элементов с последующим вызовом данных подпрограмм с угловыми поворотами в любой точке детали. Наличие возможности имитационных средств позволяет осуществить графическое моделирование работы каждой подпрограммы, к которой имеется обращение из исходной программы. Параллельное создание файлов геометрии и технологии. При разработке графической и технологической части детали, для создании управляющей программы, автоматически генерируются исходные тексты: графика детали (хранимая в специальном и текстовом форматах), технология обработки (в текстовом формате).
Трансляция рабочей программы: После ввода и записи на диск исходной программы (графической и технологической ее частей) осуществляется трансляция, т.е. формирование управляющей программы для машины термической резки. После трансляции готовая управляющая программа может быть выведена и записана на USB. Формат УП соответствует СТАНДАРТУ ISO 6582 формат ESSI или ISO. Чтение DXF ЧТЕНИЕ DXF В GEO – файл формата dxf может быть загружен, как геометрический образ (без вспомогательных линий). Загружены будут все линии, окружности и дуги, сформированные в SolidWorks 2001, AUTOCAD 2004 или КОМПАС v9-15 и сохранённые как name.dxf. Автоматическое создание программы и фигур DXF Имеется возможность как построение технологии обхода детали вручную, так и АВТОМАТИЧЕСКАЯ в несколько кликов мышью. Формы листов для раскроя Форма листов для раскроя может быть выбрана прямоугольной для сортаментного листа любых размеров, что устанавливается по наличию листов у заказчика. Также может быть КРУГЛОЙ для остатков от предыдущих вырезок больших отверстий в деталях, а также произвольной для остатков от предыдущих вырезок деталей на прямоугольных листах. Автоматизированная раскладка деталей на листе Раскладка деталей на листе любой формы производится автоматизировано после загрузки списка деталей и их количества в Задание. Возможны корректировки положения деталей со сдвигами как групп деталей, так и по одной с угловыми поворотами на любые углы. Система SAPR распространяется как есть на данный момент и бесплатная.
Видео: https://youtu.be/VSyL7zkC33Y , https://youtu.be/P—_1Z34Ro4 , https://youtu.be/0sM6ksrUauU , https://youtu.be/bPyJreB4rp0 , https://youtu.be/geKYCfB_rEw , https://youtu.be/Lvvxe_vNlek , https://youtu.be/kezLunXfSec , https://youtu.be/Dw1-QF7KP5E , https://youtu.be/26s5EIrHddg , https://youtu.be/RglUwveBb7A , https://youtu.be/Y2c9Otlu_to ,
Построение фигуры внутренним построителем: https://youtu.be/Z7UoYce6rdI , https://youtu.be/NFur2cD4Z0o , https://youtu.be/HLdFOeQbdL8 , https://youtu.be/sAgcv_VSopw , https://youtu.be/ZJsRgQzjfgM ,
Видео работы машин термической резки: https://youtu.be/juUq9xo5cqU , https://youtu.be/XSLZYBopXO0 , https://youtu.be/8E11FyKMSv0 , https://youtu.be/Hq11ZsUJ9SA , https://youtu.be/xakixl55678 , https://youtu.be/_L6lclc1Qtg , https://youtu.be/X2mvJfPke5c .
Сама система скачивать по адресу https://files.fm/u/z5xcrk2ge .
Убрана ошибка чтения незаконченного раскроя не из директории построения раскроя по небрежности пользователя программы.
В видео добавлено как имея программу контура детали создать эквидистантную ей программу, для случая отсутствия в системе управления УЧПУ Заказчика корректора для ввода эквидистанты или если он по каким то причинам не работает. Это работает и не только для одной детали, но и для целого раскроя. Но тогда созданная по этой программе в SAPR фигура будет цельной, состоящей из многих подфигур, т.е. целого раскроя.
Номер
Сообщение
Описание
0001
ОШИБКА TH
Во время считывания с устройства ввода обнаружена ошибка TH. Код, вызвавший при считывании ошибку TH, и количество операторов до него от блока можно проверить в окне диагностики.
0002
ОШИБКА TV
Ошибка TV обнаружена в единичном блоке.
Проверка TV может быть отменена присвоением TVC в параметре ном. 0000#0 значения «0».
0003
СЛИШКОМ МНОГО ЗНАКОВ
Данные введены с большим количеством символов, чем разрешено для оператора ЧПУ. Количество допустимых символов варьируется в зависимости от функции и слова.
0004
АДРЕС НЕ НАЙДЕН
Адрес слов(а) ЧПУ + числовое значение не соответствуют формату слова. Данный сигнал тревоги выдается также, если пользовательская макрокоманда не содержит зарезервированного слова или не соответствует синтаксису.
0005
ОТСУТСТВУЮТ ДАННЫЕ ПОСЛЕ АДРЕСА
Адрес слов(а) ЧПУ + числовое значение не соответствуют формату слова. Данный сигнал тревоги выдается также, если пользовательская макрокоманда не содержит зарезервированного слова или не соответствует синтаксису.
0006
НЕВЕРНОЕ ИСПОЛЬЗОВАНИЕ ЗНАКА МИНУС
Знак минус (-) был задан в команде ЧПУ или в системной переменной, где задание знак минус не разрешено.
0007
НЕВЕРНОЕ ИСПОЛЬЗОВАНИЕ ДЕСЯТИЧНОЙ ТОЧКИ
Десятичная точка (.) была задана в адресе, где нельзя задать десятичную точку, либо были заданы две десятичные точки.
0009
НЕВЕРНЫЙ АДРЕС ЧУ
Был задан неверный адрес, либо не задан параметр 1020.
0010
НЕВЕРНЫЙ G-КОД
Задан неиспользуемый G-код.
0011
НУЛЕВАЯ ПОДАЧА (КОМАНДА)
Скорость подачи резания, предписанная F кодом, была задана равной 0. Данный сигнал тревоги порождается также, если задан чрезвычайно малый F-код, предписанный для S-кода в команде жесткого нарезания резьбы, так как инструмент не может нарезать при заданном шаге.
0015
СЛИШКОМ МНОГО ОСЕЙ ОДНОВРЕМЕННО
Команда перемещения была задана для большего числа осей, чем доступно для функции одновременного управления осями.
Либо разделите запрограммированные оси перемещения на два блока.
0020
ПРЕВЫШЕНИЕ ДОПУСКА ПО РАДИУСУ
Была задана дуга, для которой разность по радиусу в начальной и конечной точках превышает значение, заданное в параметре ном. 3410. Проверьте коды центра дуги I, J и K в программе. Траектория инструмента, если в параметре ном. 3410 задано большое значение, представляет собой спираль.
0021
НЕВЕРНЫЙ ВЫБОР ПЛОСКОСТИ
Команды выбора плоскости с G17 по G19 ошибочны. Перепрограммируйте так, чтобы те же 3 основные параллельные оси не были заданы одновременно.
Этот сигнал тревоги порождается также, если задана ось, которая не должна быть указана для обработки плоскости, например, для круговой интерполяции.
Для 0i -TD опция винтовой интерполяции необходима для активации спецификации 3 или более осей для блока G02/G03.
0022
НЕ ОБНАРУЖЕНА КОМАНДА R ИЛИ I, J, K
В команде круговой интерполяции отсутствует радиус дуги R или координата I, J или K расстояния между начальной точкой и центром дуги.
0023
НЕВЕРНАЯ КОМАНДА РАДИУСА
Для команды радиуса дуги R задано отрицательное значение. В серии T дуга с углом более 180° не может быть задана посредством команды R. Измените программу.
0025
КРУГОВОЕ РЕЗАНИЕ В УСКОРЕННОМ РЕЖИМЕ (F0)
F0 (ускоренный подвод при подаче с однозначным F-кодом или обратной подаче) был задан во время круговой интерполяции (G02, G03).
0027
НЕ ЗАДАНЫ ОСИ В G43/G44
Не заданы оси в блоках G43 и G44 для коррекции на длину инструмента типа С.
Коррекция не отменена, но другая ось смещена для коррекции на длину инструмента типа С.
Несколько осей задано для одного блока, когда тип коррекции на длину инструмента — C.
0028
НЕВЕРНЫЙ ВЫБОР ПЛОСКОСТИ
Команды выбора плоскости с G17 по G19 ошибочны. Перепрограммируйте так, чтобы те же 3 основные параллельные оси не были заданы одновременно. Этот сигнал тревоги порождается также, если задана ось, которая не должна быть указана для обработки плоскости, например, для круговой интерполяции.
Для 0i -TD опция винтовой интерполяции необходима для активации спецификации 3 или более осей для блока G02/G03.
0029
НЕВЕРНАЯ ВЕЛИЧИНА КОРРЕКЦИИ
Коррекция с неверным номером
0030
НЕВЕРНЫЙ НОМЕР КОРРЕКЦИИ
Был задан неверный номер коррекции.
0031
НЕВЕРНАЯ КОМАНДА Р В G10
Ввод данных для ном. L команды G10 или соответствующей функции не активирован. Не задан адрес настройки данных, например, P или R. Была задана команда адреса, не связанная с настройкой данных. Адрес меняется вместе с номером L.
Знак или десятичная запятая заданного адреса ошибочны, или заданный адрес находится за пределами диапазона.
0032
НЕВЕРНАЯ ВЕЛИЧИНА КОРРЕКЦИИ В G10
При установке величины коррекции с помощью G10 или при записи величины коррекции с помощью системных переменных величина коррекции оказалась избыточной.
0033
НЕТ ПЕРЕСЕЧЕНИЯ ПРИ КОРРЕКЦИИ НА РЕЖУЩИЙ ИНСТРУМЕНТ
Нет пересечения при расчете пересечения для коррекции на радиус инструмента/на радиус вершины инструмента. Измените программу.
0034
КРУГОВОЕ ДВИЖЕНИЕ В БЛОКЕ ЗАПУСКА/ВЫХОДА ЗАПРЕЩЕНО
При коррекции на радиус инструмента / на радиус вершины инструмента запуск или отмена выполняются в режиме G02 или G03. Измените программу.
0035
НЕЛЬЗЯ ЗАДАТЬ G31
1) Нельзя задать G31. Этот сигнал тревоги генерируется, если не отменен G-код (например, для коррекции на радиус инструмента / на радиус вершины инструмента) группы 07.
2) Пропуск по пределу крутящего момента не был задан в команде пропуска по пределу крутящего момента (G31P98 или P99). Задайте пропуск по пределу крутящего момента в окне РМС или другим способом.
0037
НЕВОЗМОЖНО ИЗМЕНИТЬ ПЛОСКОСТЬ В G41/G42
Плоскость коррекции G17/G18/G19 была изменена в ходе коррекции на режущий инструмент или на радиус вершины инструмента. Измените программу.
0038
СТОЛКНОВЕНИЕ В БЛОКЕ КРУГОВОГО ПЕРЕМЕЩЕНИЯ
Зарез происходит при коррекции на радиус инструмента / на радиус вершины инструмента, так как начальная или конечная точки дуги совпадают с центром дуги. Измените программу.
0039
CHF/CNR НЕ РАЗРЕШЕНЫ В G41, G42
0041
СТОЛКНОВЕНИЕ ПРИ КОРРЕКЦИИ НА РЕЖУЩИЙ ИНСТРУМЕНТ
При коррекции на радиус инструмента / на радиус вершины инструмента возможно избыточное резание. Измените программу.
0042
G45/G48 НЕ РАЗРЕШЕНЫ ПРИ CRC
Смещение инструмента (от G45 до G48) задано в режиме коррекции на радиус инструмента. Измените программу.
0044
G27-G30 НЕ ДОПУСКАЮТСЯ ПРИ ФИКСИРОВАННОМ ЦИКЛЕ
Одна из команд от G27 до G30 (G29 только для серии M) задана в режиме постоянного цикла. Измените программу.
0045
НЕ НАЙДЕН АДРЕС Q (G73/G83)
В цикле скоростного сверления с периодическим выводом или в цикле сверления с периодическим выводом величина реза за раз не задается адресом Q, либо задано Q0. Измените программу.
0046
НЕВЕРНАЯ КОМАНДА ВОЗВРАТА НА РЕФЕРЕНТНУЮ ПОЗИЦИЮ
Ошибка команды возврата во вторую, третью или четвертую референтную позицию. (Ошибка команды P-адреса.)
0050
ЗАПРЕЩЕНО СНЯТИЕ ФАСКИ/ СКРУГЛЕНИЕ УГЛА В БЛОКЕ НАРЕЗАНИЯ РЕЗЬБЫ
Блок снятия фаски или скругления угла задан в блоке нарезания резьбы. Измените программу.
0051
НЕТ ПЕРЕМЕЩЕНИЯ ПОСЛЕ СКРУГЛЕНИЯ УГЛА / СНЯТИЯ ФАСКИ
Неверное перемещение или расстояние перемещения в блоке, идущем за снятием фаски или скруглением угла. Измените программу.
0052
КОД ПОСЛЕ СНЯТИЯ ФАСКИ/СКРУГЛЕНИЯ УГЛА НЕ G01
Блоком, следующим за блоком снятия фаски или блоком скругления угла, является не блок G01 (или вертикальная линия). Измените программу.
0053
СЛИШКОМ МНОГО АДРЕСНЫХ КОМАНД
В командах снятия фаски или скругления угла задано два или более I, J, K и R.
0054
ОБРАБОТКА КОНУСА ПОСЛЕ СНЯТИЯ ФАСКИ/ СКРУГЛЕНИЯ УГЛА НЕ РАЗРЕШЕНА
Блок, в котором задано снятие фаски под заданным углом или скругление угла, включает команду обработки конической поверхности. Измените программу.
0055
ОТСУТСТВУЕТ ВЕЛИЧИНА ПЕРЕМЕЩЕНИЯ ПРИ СНЯТИИ ФАСКИ/ СКРУГЛЕНИИ УГЛА
Расстояние перемещения по оси, заданное в блоке, содержащем снятие фаски или скругление угла, меньше, чем величина снятия фаски или скругления угла. Измените программу.
0056
ОТСУТСТВУЮТ КОНЕЧНАЯ ТОЧКА И УГОЛ ПРИ СНЯТИИ ФАСКИ/ СКРУГЛЕНИИ УГЛА
При прямом программировании размеров чертежа и конечная точка, и угол были заданы в блоке, следующим за блоком, в котором был задан только угол (Aa). Измените программу.
0057
НЕТ РЕШЕНИЯ КОНЦА БЛОКА
В программировании непосредственно по размерам чертежа неверно вычислена конечная точка блока. Измените программу.
0058
НЕ НАЙДЕНА КОНЕЧНАЯ ТОЧКА
В программировании непосредственно по размерам чертежа не найдена конечная точка блока. Измените программу.
0060
НЕ НАЙДЕН ПОРЯДКОВЫЙ НОМЕР
[Внешний ввод данных/вывод данных]
Заданный номер не найден при поиске по номеру программы и по порядковому номеру.
Был выдан запрос на ввод/выод для величины коррекции для данных инструмента, но номер инструмента после включения питания не вводился. Данные инструмента, соответствующие введенному номеру инструмента, не найдены.
[Поиск номера внешней заготовки]
Программа, соответствующую заданной заготовке, не найдена. [Перезапуск программы]
В спецификации порядкового номера перезапуска программы не найден заданный порядковый номер.
0061
КОМАНДА P ИЛИ Q ОТСУТСТВУЕТ В БЛОКЕ МНОГОКРАТНО ПОВТОРЯЕМЫХ ЦИКЛОВ
Не задан адрес Р или Q в команде многократно повторяемого цикла (G70, G71, G72 или G73).
0062
ВЕЛИЧИНА РЕЗАНИЯ НЕВЕРНА В ЦИКЛЕ ЧЕРНОВОГО РЕЗАНИЯ
Был задан ноль или отрицательное значение многократно повторяемого цикла черновой обработки резанием (G71 или G72) в качестве глубины реза.
0063
НЕ НАЙДЕН БЛОК ЗАДАННОГО НОМЕРА ПОСЛЕДОВАТЕЛЬНОСТИ
Не найден порядковый номер, заданный адресами P и Q в команде многократно повторяемого цикла (G70, G71, G72 или G73).
0064
ФОРМА ЧИСТОВОЙ ОБРАБОТКИ НЕ ИЗМЕНЯЕТСЯ МОНОТОННО (ПЕРВЫЕ ОСИ)
В программе чистовой обработки для многократно повторяемого цикла черновой обработки резанием (G71 или G72) команда для первой оси плоскости задавала монотонное увеличение или уменьшение.
0065
G00/G01 НЕ ЯВЛЯЕТСЯ ПЕРВЫМ БЛОКОМ ПРОГРАММЫ ОБРАБОТКИ ФОРМЫ
В первом блоке программы обработки формы, задаваемый P многократно повторяемый стандартный цикл (G70, G71, G72 или G73), G00 или G01 не был заданы.
0066
НЕДОСТУПНАЯ КОМАНДА В БЛОКЕ МНОГОКРАТНО ПОВТОРЯЕМЫХ ЦИКЛОВ
Недоступная команда была обнаружена в командном блоке многократно повторяемых циклов (G70, G71, G72 или G73).
0067
МНОГОКРАТНО ПОВТОРЯЕМЫЕ ЦИКЛЫ НЕ НАХОДЯТСЯ В ПАМЯТИ ПРОГРАММЫ ОБРАБОТКИ ДЕТАЛЕЙ
Команда многократно повторяемого постоянного цикла (G70, G71, G72, или G73) не зарегистрирована в области памяти на магнитных лентах.
0069
ПОСЛЕДНИЙ БЛОК ПРОГРАММЫ ОБРАБОТКИ ФОРМЫ ЯВЛЯЕТСЯ НЕВЕРНОЙ КОМАНДОЙ
В программе чистовой обработки в многократно повторяемом цикле черновой обработки резанием (G70, G71, G72 или G73) команда снятия фаски или скругления угла R в последнем блоке прерывается на середине.
0070
В ПАМЯТИ ОТСУТСТВУЕТ МЕСТО ДЛЯ ПРОГРАММЫ
Недостаточно памяти.
Удалите ненужные программы и повторите попытку.
0071
ДАННЫЕ НЕ НАЙДЕНЫ
1) Не найден адрес по запросу.
2) При поиске по номеру программы не найдена программа с заданным номером.
3) В спецификации номера блока перезапуска программы не найден заданный номер блока.
Проверьте данные.
0072
ДАННЫЕ НЕ НАЙДЕНЫ
Число программ для хранения превысило 400 (одноконтурная система) или 800 (двухконтурная система серии T). Удалите ненужные программы и выполните регистрацию программы снова.
0073
НОМЕР ПРОГРАММЫ УЖЕ ИСПОЛЬЗУЕТСЯ
Заданный номер программы уже используется. Измените номер программы или удалите ненужные программы и выполните регистрацию программы снова.
0074
НОМЕР ПРОГРАММЫ УЖЕ ИСПОЛЬЗУЕТСЯ
Номер программы не входит в диапазон от 1 до 9999. Измените номер программы.
0075
ЗАЩИТА
Сделана попытка зарегистрировать программу, номер которой защищен. При согласовании программы был неверно введен пароль для защищенной программы. Была предпринята попытка выбора программы, редактируемой в фоновом режиме, в качестве главной программы. Была предпринята попытка вызова программы, редактируемой в фоновом режиме, в качестве подпрограммы.
0076
ПРОГРАММА НЕ НАЙДЕНА
Заданная программа не найдена при вызове подпрограммы или вызове макрокоманды. Коды M, G, T или S вызываются командой P, отличной от команды в M98, M198, G65, G66 или пользовательской макропрограммы типа прерывания, а программа вызывается специальным адресом. Данный сигнал тревоги также порождается, если программа не найдена при данных вызовах.
0077
СЛИШКОМ МНОГО ВЛОЖЕННЫХ ПОДПРОГРАММ, МАКРОПРОГРАММ
Общее число вызовов подпрограмм и пользовательских макрокоманд превышает допустимый диапазон. Во время подпрограммы из внешней памяти был выполнен вызов подпрограммы.
0078
НЕ НАЙДЕН ПОРЯДКОВЫЙ НОМЕР
Заданный порядковый номер не был найден при поиске по порядковому номеру. Не найден порядковый номер, заданный в переходном пункте назначения в GOTO— и M99P—.
0079
НЕСООТВЕТСТВИЕ ПРОГРАММ
Программа в памяти не соответствует программе, хранящейся на ленте. Несколько программ не подлежат непрерывному согласованию, если параметр ном. 2200#3 имеет значение «1». Задайте в параметре ном. 2200#3 значение «0» перед выполнением сопоставления.
0080
НЕПРАВИЛЬНО ВВЕДЕН СИГНАЛ ДОСТИЖЕНИЯ ПОЛОЖЕНИЯ ИЗМЕРЕНИЯ G37
Если выполняется функция измерения длины инструмента (G37), сигнал достижения положения измерения доходит до 1 во фронтальной части, определенной значением £, заданным в параметре ном.6254. Как альтернатива, сигнал не доходит до 1.
Если используется функция автоматической коррекции на инструмент (G36, G37), сигналы достижения положения измерения (XAE1, XAE2) не доходят до 1 в диапазоне, определенном значением £, заданном в параметрах ном.6254 и ном.6255.
0081
НОМ. КОРРЕКЦИИ G37 НЕ ЗАДАН
Функция измерения длины инструмента (G37) задана без задания H кода. Исправьте программу.
Функция автоматической коррекции ни инструмент (G36, G37) задана без задания Т кода. Исправьте программу.
0082
G37 ЗАДАНО С Н-КОДОМ
Функция измерения длины инструмента (G37) задано вместе с Н кодом в том же блоке.
Исправьте программу.
Функция автоматической коррекции на инструмент (G37) задана в одном блоке с Т-кодом.
Исправьте программу.
0083
НЕВЕРНАЯ КОМАНДА ОСИ G37
Была обнаружена ошибка в спецификации оси функции измерения длины инструмента (G37). Как альтернатива, задана команда перемещения как команда приращения. Исправьте программу.
Была обнаружена ошибка в спецификации оси функции автоматической коррекции на инструмент (G36, G37). Как альтернатива, задана команда перемещения как команда приращения.
Исправьте программу.
0085
ОШИБКА ПЕРЕПОЛНЕНИЯ
Следующий символ был получен от устройства ввода/вывода, подключенного к интерфейсу считывающего перфоратора 1 до того, как он смог считать полученный предварительно символ. Переполнение, ошибка четности или ошибка кадрирования возникли во время считывания интерфейсом устройства считывания/вывода на перфоленту 1. Неверны число битов введенных данных, настройка скорости передачи данных в бодах или номер спецификации устройства ввода/вывода.
0086
DR ОТКЛ.
В ходе процесса ввода/вывода интерфейсом считывания/вывода не перфоленту 1 сигнал готовности ввода набора данных устройства ввода/вывода (DR) был отключен. Возможными причинами являются не включение устройства ввода/вывода, порванный кабель и дефектная печатная плата.
0087
ПЕРЕПОЛНЕНИЕ БУФЕРА
В ходе считывания интерфейс считывающего перфоратора 1, хотя и была дана команда остановки считывания, была введено более 10 символов. Устройство ввода/вывода или печатная плата были дефектными.
0090
НЕ ЗАВЕРШЕН ВОЗВРАТ НА РЕФЕРЕНТНУЮ ПОЗИЦИЮ
1) Нельзя выполнить возврат на референтную позицию обычным образом, поскольку начальная точка возврата на референтную позицию расположена слишком близко к референтному положению, или скорость слишком низкая. Переместите начальную точку от референтной позиции на достаточное расстояние или задайте достаточно высокую скорость для выполнения возврата на референтную позицию.
2) Была попытка задать нулевое положение для детектора абсолютного положения с помощью возврата на референтную позицию, если необходимо задать нулевую точку.
Проверните двигатель вручную минимум на один оборот и установите нулевое положение датчика абсолютного положения, отключив и снова включив ЧПУ и сервоусилитель.
0091
РУЧНОЙ ВОЗВРАТ НА РЕФЕРЕНТНУЮ ПОЗИЦИЮ НЕ ВЫПОЛНЕН ПРИ ОСТАНОВЕ ПОДАЧИ
Невозможно выполнить ручной возврат на референтную позицию, когда автоматическая операция приостановлена. Выполните ручной возврат на референтную позицию, когда автоматическая операция остановлена или сброшена.
0092
ОШИБКА ПРОВЕРКИ ВОЗВРАТА К НАЧАЛУ КООРДИНАТ (G27)
Ось, заданная в G27, не вернулась на референтную позицию. Перепрограммируйте, чтобы ось вернулась на референтную позицию.
0094
ЗАПРЕЩЕН ТИП Р (ИЗМЕНЕНИЕ КООРДИНАТ)
При повторном пуске программы тип Р задать нельзя. (После прерывания автоматической работы выполнена операция установки системы координат). Выполните надлежащую операцию в соответствии с руководством пользователя.
0095
ЗАПРЕЩЕН ТИП Р (ИЗМЕНЕНИЕ ВНЕШНЕГО СМЕЩЕНИЯ)
При повторном пуске программы тип Р задать нельзя. (После прерывания автоматической работы изменена величина внешней коррекции начала координат заготовки). Выполните надлежащую операцию в соответствии с руководством пользователя.
0096
ЗАПРЕЩЕН ТИП Р (ИЗМЕНЕНИЕ СМЕЩЕНИЯ ЗАГОТОВКИ)
При повторном пуске программы тип Р задать нельзя. (После прерывания автоматической работы изменена величина коррекции начала координат заготовки). Выполните надлежащую операцию в соответствии с руководством пользователя.
0097
ЗАПРЕЩЕН ТИП Р (АВТОМАТИЧЕСКОЕ ВЫПОЛНЕНИЕ)
Нельзя указать тип Р при повторном пуске программы. (После включения питания, после аварийного останова или сброса сигналов тревоги 0094 — 0097 автоматическая операция не выполняется). Выполните автоматическую операцию.
0099
ИСПОЛН. MDI НЕ ДОПУСКАЕТСЯ ПОСЛЕ ПОИСКА
После завершения поиска при перезапуске программы с помощью MDI дана команда перемещения.
0109
ОШИБКА ФОРМАТА В G08
В коде G08 после Р задано значение, отличное от 0 или 1, или не задано значение.
0110
ПЕРЕПОЛНЕНИЕ: ЦЕЛАЯ ЧАСТЬ
Целая часть числа вышла за пределы диапазона при арифметических вычислениях.
0111
ПЕРЕПОЛНЕНИЕ: ПЛАВАЮЩ.
Десятичная точка (числовые данные в формате с плавающей точкой) вышла за пределы диапазона при арифметических вычислениях.
0112
ДЕЛЕНИЕ НА НОЛЬ
Была сделана попытка деления на ноль в пользовательской макрокоманде.
0113
НЕВЕРНАЯ КОМАНДА
Запрограммирована функция, которую нельзя использовать в макрокоманде пользователя. Измените программу.
0114
НЕВЕРНЫЙ ФОРМАТ ВЫРАЖЕНИЯ
Формат, используемый в выражении в пользовательском макрооператоре, ошибочный. Ошибка формата записи параметра.
0115
НОМЕР ПЕРЕМЕННОЙ ВНЕ ДИАПАЗОНА
Номер, который нельзя использовать для локальной переменной, общей переменной или системной переменной, заданный в пользовательской макрокоманде.
0116
ПЕРЕМЕННАЯ С ЗАЩИТОЙ ОТ ЗАПИСИ
Была произведена попытка использовать в пользовательской макрокоманде на левой стороне выражение переменной, что можно использовать на правой стороне выражения.
0118
СЛИШКОМ МНОГО ВЛОЖЕНИЙ В СКОБКИ
Слишком много скобок»[ ]» вложено в пользовательской макрокоманде. Уровень вложения, включая функциональные скобки, равен 5.
0119
ЗНАЧЕНИЕ АРГУМЕНТА ВНЕ ДИАПАЗОНА
Значение аргумента функции пользовательской макрокоманды находится вне диапазона.
0122
СЛИШКОМ МНОГО ВЛОЖЕНИЙ МАКРОКОМАНД
В пользовательскую макрокоманду было вложено слишком много вызовов макрокоманд.
0123
НЕВЕРНЫЙ РЕЖИМ ДЛЯ GOTO/WHILE/DO
Оператор GOTO или оператор WHILE-DO обнаружен в главной программе в режиме MDI или прямого ЧПУ.
0124
ОТСУТСТВУЕТ КОНЕЧНЫЙ ОПЕРАТОР
Команда END, соответствующая команде DO, отсутствовала в пользовательской макрокоманде^
0125
ОШИБКА ФОРМАТА МАКРООПЕРАТОРА
Формат, используемый в макрооператоре в пользовательской макрокоманде, ошибочный.
0126
НЕВЕРНЫЙ НОМЕР ЦИКЛА
Номера DO и END в пользовательской макрокоманде ошибочны или превышают допустимый диапазон (диапазон действительных значений: от 1 до 3).
0127
ДУБЛИРОВАНИЕ ОПЕРАТОРА ЧУ, МАКРООПЕРАТОРА
Оператор ЧПУ и макрооператор были заданы в одном блоке.
0128
НЕВЕРНЫЙ ПОРЯДКОВЫЙ НОМЕР МАКРОПРОГРАММЫ
Заданный порядковый номер не найден при поиске порядкового номера. Не найден порядковый номер, заданный как пункт назначения перехода GOTO— и M99P—.
0129
ИСПОЛЬЗОВАНИЕ ‘G’ В КАЧЕСТВЕ АРГУМЕНТА
G используется в качестве аргумента при вызове пользовательской макрокоманды. G нельзя использовать в качестве аргумента.
0130
КОНФЛИКТ ЧПУ И ОСИ РМС
Команда ЧПУ и команда управления осью РМС не были согласованы. Измените программу или цепную схему.
0136
ОСЬ ПОЗИЦИОНИРОВАНИЯ ШПИНДЕЛЯ ОДНОВРЕМЕНО С ДРУГОЙ ОСЬЮ
Ось позиционирования шпинделя и другая ось заданы в одном блоке.
0137
M-КОД И КОМАНДА ПЕРЕМЕЩЕНИЯ В ОДНОМ БЛОКЕ
т
Ось позиционирования шпинделя и другая ось заданы в одном блоке.
0139
НЕЛЬЗЯ ИЗМЕНИТЬ ОСЬ, УПРАВЛЯЕМУЮ РМС
Ось PMC была выбрана для оси, для которой направляется ось PMC.
0140
НОМЕР ПРОГРАММЫ УЖЕ ИСПОЛЬЗУЕТСЯ
Сделана попытка выбрать или удалить в фоновом режиме программу, выбранную в основном режиме. Выполнить правильную операцию для фоновой версии.
0142
НЕВЕРНЫЙ МАСШТАБ
Коэффициент масштабирования составляет 0 раз или 10000 раз или более. Измените настройку коэффициента масштабирования.
(G51P… или G51I J K… или параметр (ном. 5411 или 5421))
0143
ПЕРЕПОЛНЕНИЕ УПРАВЛЯЮЩИХ ДАННЫХ
Переполнение при хранении внутренних данных ЧПУ. Данный сигнал тревоги также порождается, если результаты внутреннего вычисления масштабирования (серия M), поворота системы координат (серия M) и цилиндрической интерполяции переполняют память данных. Он также порождается в ходе ввода величины ручного вмешательства.
0144
НЕВЕРНО ВЫБРАНА ПЛОСКОСТЬ
Плоскость поворота системы координат и плоскость дуги или компенсации на режущий инструмент должны совпадать. Измените программу.
0145
НЕВЕРНОЕ ИСПОЛЬЗОВАНИЕ G12.1/G13.1
Номер оси параметров выбора плоскости ном. 5460 (линейная ось) и ном. 5461(ось вращения) в режиме интерполяции в полярных координатах вне диапазонв (от 1 до числа управляемых осей).
0146
НЕВЕРНОЕ ИСПОЛЬЗОВАНИЕ G-КОДА
При задании или отмене режима интерполяции в полярных координатах G-код должен быть модальной командой G40. В режиме интерполяции в полярных координатах был задан неверный G-код.
В этом режиме могут быть заданы следующие следующие G-коды: G01,G02,G03,G04,G40,G41,G42,G65,G66,G67,
(G90 и G91 для системы G-кодов B или C), G98,G99
0148
ОШИБКА НАСТРОЙКИ
Уровень замедления автоматического изменения скорости подачи при обработке углов находится вне устанавливаемого диапазона оцениваемого угла. Измените параметры (ном.1710-1714)
0149
ОШИБКА ФОРМАТА В G10L3
При регистрации (от G10L3 до G11) данных управления ресурсом инструмента был задан адрес, отличный от Q1, Q2, P1, и P2, или недопустимый адрес.
0150
НЕВЕРНЫЙ НОМЕР ГРУППЫ РЕСУРСА
Номер группы инструментов превысил максимальное допустимое значение. Номер группы инструментов (P после задания G10 L3;) или номер группы, указанный T-кодом управления ресурсом инструмента в программе обработки.
0151
ГРУППА НЕ НАЙДЕНА В ДАННЫХ РЕСУРСА
Группа инструментов, указанная в программе обработки, не задана в данных управления ресурсом инструмента.
0152
ПРЕВЫШЕНО МАКСИМАЛЬНОЕ ЧИСЛО ИНСТРУМЕНТОВ
Число инструментов, зарегистрированных в группе, превысило максимально допустимое число инструментов для регистрации.
01 53
T-КОД НЕ ОБНАРУЖЕН
При регистрации данных ресурса инструмента блок, в котором должен быть задан T-код, не содержит T-кода. Либо, при методе замены инструмента D, задано только M06. Измените программу.
0154
ИНСТРУМЕНТ НЕ ИСПОЛЬЗУЕТСЯ В ГРУППЕ РЕСУРСА
Команда H99, команда D99 или код H/D, заданный параметрами ном. 13265 и ном. 13266, была задана, когда не использовался ни один из входящих в группу инструментов.
0155
НЕВЕРНАЯ КОМАНДА T-КОДА
В программе обработки T-код в блоке, содержащем M06, не соответствует текущей используемой группе. Измените программу.
0156
НЕ НАЙДЕНА КОМАНДА P/L
Команды P и L не заданы в начале программы для настройки группы инструментов. Измените программу.
0157
СЛИШКОМ МНОГО ГРУПП ИНСТРУМЕНТОВ
При регистрации данных управления ресурсом инструмента значения счетчиков блока команды групповой настройки P (номер группы) и L (срок службы инструмента) превысили максимальное число для группы.
0158
ЗНАЧЕНИЕ СРОКА СЛУЖБЫ ИНСТРУМЕНТА ВНЕ ДИАПАЗОНА
Задаваемое значение срока службы слишком большое. Измените настройку.
0159
НЕВЕРНЫЕ ДАННЫЕ РЕСУРСА ИНСТРУМЕНТА
Данные управления ресурсом инструмента повреждены по какой-то причине. Зарегистрируйте данные инструмента в группе инструментов или данные инструмента в группе снова посредством G10L3 или ввода в режиме MDI.
0160
НЕСООТВЕТСТВИЕ М-КОДА ОЖИДАНИЯ
М-код ожидания ошибочный.
Для контуров 1 и 2 заданы различные М-коды ожидания.
0163
НЕВЕРНАЯ КОМАНДА В G68/G69
G68 и G69 не запрограммированы независимо при сбалансированном резании.
0169
НЕВЕРНЫЕ ГЕОМЕТРИЧЕСКИЕ ДАННЫЕ ИНСТРУМЕНТА
Неверные данные о форме инструмента при проверке столкновений. Установите правильные данные или выберите верные данные о форме инструмента.
0175
НЕВЕРНАЯ ОСЬ G07.1
Задана ось, по которой нельзя выполнять цилиндрическую интерполяцию. В блоке G07.1 задана более чем одна ось. Была сделана попытка отмены цилиндрической интерполяции по оси, которая не была в режиме цилиндрической интерполяции.
В режиме цилиндрической интерполяции для задания круговой интерполяции, включая ось вращения (если бит 0 (ROT) параметра ном. 1006 имеет значение 1, и задан параметр ном. 1260), значение параметра оси вращения ном. 1022 для назначения параллельной оси должно быть не 0, а 5, 6 или 7.
0176
ИСПОЛЬЗОВАНИЕ НЕВЕРНОГО G-КОДА (РЕЖИМ G07.1)
Был задан G-код, который не может быть задан в режиме цилиндрической интерполяции. Этот сигнал тревоги также срабатывает, если G-код группы 01 был в задан в модальной группе G00, или был задан код G00. Перед тем, как задать код G00, следует отменить режим цилиндрической интерполяции
0190
ВЫБРАНА НЕВЕРНАЯ ОСЬ (G96)
Неверное значение было задано в P в блоке G96 или в параметре ном. 3770.
0194
КОМАНДА ШПИНДЕЛЯ В СИНХРОННОМ РЕЖИМЕ
Режим управления контуром Cs, команда позиционирования шпинделей или режим жесткого нарезания резьбы метчиком были заданы в режиме синхронного управления шпинделями.
Режим управления контуром Cs или режим жесткого нарезания резьбы метчиком были заданы в режиме синхронного управления шпинделями или простого синхронного управления шпинделями.
0197
ОСЬ С ЗАДАНА В РЕЖИМЕ ШПИНДЕЛЯ
Программа задала перемещение вдоль оси Сб, когда сигнал переключения управления контуром Cs был отключен.
0199
МАКРОСЛОВО НЕ ОПРЕДЕЛЕНО
Использовано не определенное макрослово. Измените макрокоманду пользователя.
0200
НЕВЕРНАЯ КОМАНДА S-КОДА
В режиме жесткого нарезания резьбы метчиком задано значение S, не входящее в диапазон, или не задано совсем. Параметры (ном. 5241 -5243) заданы равными S значению, которое можно задать для жесткого нарезания резьбы. Исправьте параметры или измените программу.
0201
В РЕЖИМЕ ЖЕСТКОГО НАРЕЗАНИЯ РЕЗЬБЫ МЕТЧИКОМ НЕ НАЙДЕНА СКОРОСТЬ ПОДАЧИ
Команда F кода для скорости подачи резания равна нулю.
Если значение F команды гораздо меньше, чем значение команды S, если задана команда жесткого нарезания резьбы метчиком, порождается данный сигнал тревоги. Это происходит потому, что резание невозможно с шагом, заданным программой.
0202
ПЕРЕПОЛНЕНИЕ ПОЛОЖЕНИЯ LSI
В режиме жесткого нарезания резьбы метчиком слишком большая величина распределения импульсов для шпинделей. (Системная ошибка)
0203
ПРОГРАММНОЕ НЕСООТВЕТСТВИЕ ПРИ ЖЕСТКОМ НАРЕЗАНИИ РЕЗЬБЫ МЕТЧИКОМ
В режиме жесткого нарезания резьбы метчиком неверно положение М-кода жесткого режима (М29) или S-команды. Измените программу.
0204
НЕВЕРНАЯ ОПЕРАЦИЯ ОСИ
В режиме жесткого нарезания резьбы метчиком между блоком М-кода жесткого режима (М29) и блоком G84 (или G74) задано перемещение по оси. Измените программу.
0205
СИГНАЛ DI ЖЕСТКОГО РЕЖИМА ВЫКЛЮЧЕН
Несмотря на то, что при жестком нарезании резьбы метчиком задан М-код (М29), во время выполнения блока G84 (или G74) не включен сигнал жесткого режим DI (DGN G061.0). Проверьте цепную схему РМС для выяснения причины, по которой сигнал DI не был включен.
0206
НЕЛЬЗЯ ИЗМЕНИТЬ ПЛОСКОСТЬ (ЖЕСТКОЕ НАРЕЗАНИЕ РЕЗЬБЫ)
Переключение плоскости было задано в жестком режиме. Измените программу.
0207
НЕСООТВЕТСТВИЕ ДАННЫХ ЖЕСТКОГО РЕЖИМА
При жестком нарезании резьбы метчиком заданное расстояние -слишком короткое или слишком длинное.
0210
НЕЛЬЗЯ ЗАДАТЬ М198/М99
1) Во время операции по графику была предпринята попытка выполнения команды М198 или М99. Либо во время работы с прямым ЧПУ была предпринята попытка выполнения команды М198. Измените программу.
2) Во время фрезерования глубоких выемок в многократно повторяющемся постоянном цикле была предпринята попытка выполнения команды М99 с помощью макропрерывания.
0213
НЕВЕРНАЯ КОМАНДА В СИНХРОННОМ РЕЖИМЕ
При управлении осью подачи в ходе синхронной работы произошли следующие ошибки.
1) Программа выдала команду перемещения ведомой оси.
2) Программа выдала команду ручной работы ведомой оси.
3) Программа выдала команду автоматического возврата на референтную позицию без задания ручного возврата на референтную позицию после включения питания.
0214
НЕВЕРНАЯ КОМАНДА В СИНХРОННОМ РЕЖИМЕ
В режиме синхронного управления установлена система координат или выполнена коррекция на длину инструмента (серия M) типа смещения. Исправьте программу.
0217
ДУБЛИРОВАНИЕ G51.2 (КОМАНДЫ)
В режиме G51.2 дополнительно задан G51.2. Измените программу.
0218
НЕ НАЙДЕНА КОМАНДА P/Q
В блоке G51.2 не задано P или Q, либо значение команды вне диапазона. Измените программу. Более подробные сведения о причине появления этого сигнала тревоги при полигональной обточке между шпинделями приведены в DGN ном. 471.
0219
НЕЗАВИСИМОЕ ЗАДАНИЕ G51.2/G50.2
G51.2 и 50.2 были заданы в одном блоке для других команд. Изменить программу в другом блоке.
0220
НЕВЕРНАЯ КОМАНДА В СИНХРОННОМ РЕЖИМЕ
При синхронной операции для синхронной оси задано перемещение с помощью программы ЧПУ или интерфейса РМС осевого управления. Измените программу или проверьте цепную схему PMC.
0221
НЕВЕРНАЯ КОМАНДА В СИНХРОННОМ РЕЖИМЕ
Синхронная операция полигональной обработки и контурное осевое управление Cs или сбалансированное резание выполняются одновременно. Измените программу.
0222
РАБОТА С ПРЯМЫМ ЧПУ ПРИ ФОНОВОМ РЕДАКТИРОВАНИИ ЗАПРЕЩЕНА
Ввод и вывод выполняются одновременно с фоновым редактированием. Выполните правильное действие.
0224
ВОЗВРАТ НА НОЛЬ НЕ ЗАВЕРШЕН
Перед запуском автоматической работы не был выполнен возврат на референтрую позицию.
(Только если бит 0 (ZRNx) параметра ном. 1005 имеет значение 0) Выполните возврат на референтную позицию.
0230
R-КОД НЕ ОБНАРУЖЕН
Глубина реза R не задана в блоке, включающем G161. Либо для R задано отрицательное значение.
Измените программу.
0231
НЕВЕРНЫЙ ФОРМАТ В G10 L52
При вводе программируемого параметра возникли ошибки в заданном формате.
0232
СЛИШКОМ МНОГО КОМАНД ДЛЯ ВИНТОВОЙ ОСИ
В режиме винтовой интерполяции заданы две или три оси в качестве винтовых осей.
0233
УСТРОЙСТВО ЗАНЯТО
При попытке использовать устройство, например, устройство, подсоединенное через интерфейс RS-232-C, обнаружено, что оно используется другими пользователями.
0245
В ЭТОМ БЛОКЕ Т-КОД ЗАПРЕЩЕН
Один из G-кодов, G04, G10, G28, G29 (серия M), G30, G50 (серия T) и G53, который не может быть задан в одном блока с T-кодом, был задан с T-кодом.
0247
НАЙДЕНА ОШИБКА В КОДЕ ВЫВОДА ДАННЫХ
При выводе закодированной программы в качестве кода вывода задано EIA. Задайте ISO.
0314
НЕВЕРНАЯ НАСТРОЙКА ПОЛИГОНАЛЬНОЙ ОСИ
Неверно задана ось при полигональной обточке.
Для полигональной обточки:
1) Не задана ось вращения инструмента.
(Параметр ном. 7610)
Для полигональной обточки между шпинделями:
1) Не заданы действительные шпиндели.
(Параметры ном. 7640 — 7643).
2) Шпиндель, не являющийся последовательным шпинделем.
3) Шпиндель не подсоединен.
0315
НЕВЕРНАЯ КОМАНДА УГЛА КРОМКИ В ЦИКЛЕ РЕЗЬБОНАРЕЗАНИЯ
Неверный угол режущей кромки инструмента задан в многократно повторяемом постоянном цикле резьбонарезания (G76).
0316
НЕВЕРНАЯ ВЕЛИЧИНА РЕЗА В ЦИКЛЕ РЕЗЬБОНАРЕЗАНИЯ
Минимальная глубина реза больше, чем высота резьбы, задана в многократно повторяемом постоянном цикле резьбонарезания (G76).
0317
НЕВЕРНАЯ КОМАНДА НАРЕЗАНИЯ РЕЗЬБЫ В ЦИКЛЕ РЕЗЬБОНАРЕЗАНИЯ
Был задан ноль или отрицательное значение в многократно повторяемом постоянном цикле резьбонарезания (G76) в качестве высоты резьбы или глубины реза.
0318
НЕВЕРНАЯ ВЕЛИЧИНА ОТВОДА В ЦИКЛЕ СВЕРЛЕНИЯ
Хотя направления отвода заданы в многократно повторяемом постоянном цикле отрезания (G74 или G75), задано отрицательное значение для Ad.
0319
НЕВЕРНА КОМАНДА КОНЕЧНОЙ ТОЧКИ В ЦИКЛЕ СВЕРЛЕНИЯ
Хотя расстояние перемещения Ai или Ak задано равным 0 в многократно повторяемом постоянном цикле отрезания (G74 или G75), значение, отличное от 0, задано для U или W.
0320
НЕВЕРНАЯ ВЕЛИЧИНА ПЕРЕМЕЩЕНИЯ/ВЕЛИЧИНА РЕЗА В ЦИКЛЕ СВЕРЛЕНИЯ
Было задано отрицательное значение в многократно повторяемом постоянном цикле отрезания (G74 или G75) как Ai или Ak (расстояние перемещения / глубина реза).
0321
НЕВЕРНОЕ ВРЕМЯ ПОВТОРЕНИЯ В ЦИКЛЕ ПОВТОРЕНИЯ СХЕМЫ
Задан нуль или отрицательное значение в многократно повторяемом постоянном замкнутом цикле (G73) в качестве значения времени повторения.
0322
ЧИСТОВАЯ ОБРАБОТКА ПОСЛЕ ЗАПУСКА
Неверная форма, которая после запуска цикла задана в программе обработки для многократно повторяемого постоянного цикла черновой обработки резанием (G71 или G72).
0323
ПЕРВЫЙ БЛОК ПРОГРАММЫ ОБРАБОТКИ ЯВЛЯЕТСЯ КОМАНДОЙ ТИПА II
Тип II задан в первом блоке программы обработки, заданном командой P в многократно повторяемом постоянном цикле (G71 или G72). Для G71 задано Z(W). Для G72 задано X(U).
0324
МАКРОПРОГРАММА ТИПА ПРЕРЫВАНИЯ ЗАДАНА В МНОГОКРАТНО ПОВТОРЯЕМЫХ ЦИКЛАХ
Макропрограмма типа прерывания была дана в ходе многократно повторяемого постоянного цикла (G70, G71, G72 или G73).
0325
НЕДОСТУПНАЯ КОМАНДА В ПРОГРАММЕ ОБРАБОТКИ ФОРМЫ
Используемая команда была дана в программе обработки для многократно повторяемого постоянного цикла (G70, G71, G72 или G73).
0326
ПОСЛЕДНИЙ БЛОК ПРОГРАММЫ ОБРАБОТКИ ФОРМЫ СОДЕРЖИТ ПРЯМЫЕ РАЗМЕРЫ ЧЕРТЕЖА
В программе чистовой обработки в многократно повторяемом цикле черновой обработки резанием (G70, G71, G72 или G73) команда прямого ввода размеров чертежа в последнем блоке прерывается на середине.
0327
МОДАЛЬНОЕ СОСТОЯНИЕ, НЕ ДОПУСКАЮЩЕЕ МНОГОКРАТНО ПОВТОРЯЕМЫХ ЦИКЛОВ
Многократно повторяемый постоянный цикл (G70, G71, G72 или G73) был задан в модальном состоянии, в котором нельзя задавать многократно повторяемый постоянный цикл.
0328
НЕВЕРНОЕ РАБОЧЕЕ ПОЛОЖЕНИЕ ПРИ КОРРЕКЦИИ НА РАДИУС ВЕРШИНЫ ИНСТРУМЕНТА
Неверная спецификация для стороны заготовки для коррекции на радиус вершины инструмента (G41 или G42) в многократно повторяемом постоянном цикле (G71 или G72).
0329
ФОРМА ЧИСТОВОЙ ОБРАБОТКИ НЕ ИЗМЕНЯЕТСЯ МОНОТОННО (ВТОРЫЕ ОСИ)
В программе чистовой обработки для многократно повторяемого цикла черновой обработки резанием (G71 или G72) команда для второй оси плоскости задавала монотонное увеличение или уменьшение.
0330
НЕВЕРНАЯ КОМАНДА ОСИ В ПОСТОЯННОМ ЦИКЛЕ ОБТОЧКИ
Ось, отличная от плоскости, задана в постоянном цикле (G90, G92 и. G94).
0334
КОРРЕКЦИЯ ВНЕ РАБОЧЕГО ДИАПАЗОНА
Данные коррекции, которая была вне рабочего диапазона, были заданы. (функция предотвращения неисправности)
0336
КОРРЕКЦИЯ НА ИНСТРУМЕНТ ЗАДАНА БОЛЕЕ, ЧЕМ ДВУМ ОСЯМ
Для коррекции на длину инструмента C была сделана попытка задать коррекцию по другим осям без отмены коррекции. Либо для коррекции на длину инструмента C задано несколько осей в блоке G43 или G44.
0337
ПРЕВЫШЕНИЕ МАКСИМАЛЬНОГО ЗНАЧЕНИЯ ПРИРАЩЕНИЯ
Значение команды превысило максимальную величину приращения. (функция предотвращения неисправности)
0338
ОШИБКА КОНТРОЛЬНОЙ СУММЫ
Неверное значение обнаружено в контрольной сумме. (функция предотвращения неисправности)
0345
НЕВЕРНОЕ ПОЛОЖЕНИЕ ОСИ Z ПРИ СМЕНЕ ИНСТРУМЕНТА
Положение смены инструмента по оси Z неверное.
0346
НЕВЕРНЫЙ НОМЕР ИНСТРУМЕНТА ПРИ СМЕНЕ ИНСТРУМЕНТА
Неверный номер инструмента для смены инструмента.
0347
НЕВЕРНАЯ КОМАНДА СМЕНЫ ИНСТРУМЕНТА В ОДНОМ БЛОКЕ.
Смена инструмент задана дважды или более в одном и том же блоке.
0348
НЕ НАЗНАЧЕНО ПОЛОЖЕНИЕ ОСИ Z ПРИ СМЕНЕ ИНСТРУМЕНТА
Шпиндель смены инструмента по оси Z не задан.
0349
ШПИНДЕЛЬ СМЕНЫ ИНСТРУМЕНТА НЕ ОСТАНАВЛИВАЕТСЯ
Остановка шпинделя смены инструмента не задана.
0350
ОШИБКА ПАРАМЕТРА ИНДЕКСА ЗАДАННОЙ ОСИ СИНХРОННОГО УПРАВЛЕНИЯ
Задан неверный номер оси синхронного управления (параметр ном. 8180).
0351
ПОСКОЛЬКУ ОСЬ ПЕРЕМЕЩАЕТСЯ, СИНХРОННОЕ УПРАВЛЕНИЕ ИСПОЛЬЗОВАТЬ НЕЛЬЗЯ.
Пока ось при синхронном управлении перемещалась, была сделана попытка запуска или отмены синхронного управления посредством сигнала выбора синхронного управления осью.
0352
ОШИБКА СОСТАВЛЕНИЯ ОСИ СИНХРОННОГО УПРАВЛЕНИЯ
Данная ошибка произошла, когда:
1) Была произведена попытка выполнить синхронное управление для оси во время синхронного, комплексного или наложенного управления.
2) Была произведена попытка синхронизировать правнука для отношения предок-потомок-внук.
3) Была произведена попытка выполнить синхронное управление, хотя отношение «предок»-«потомок»-«внук» задано не было.
0353
КОМАНДА БЫЛА ДАНА ДЛЯ ОСИ, КОТОРАЯ НЕ МОГЛА ДВИГАТЬСЯ.
T
Данная ошибка произошла, когда:
1) Команда перемещения была выполнена для оси, для которой бит 7 (NUMx) параметра ном. 8163 имел значение 1.
2) Команда перемещения была выполнена для ведомой оси при синхронном управлении.
3) Команда перемещения была выполнена для оси, для которой бит 7 (MUMx) параметра ном. 8162 имел значение 1 при комплексном управлении.
0354
G28 БЫЛО ЗАДАНО С РЕФЕРЕНТНОЙ ПОЗИЦИЕЙ, НЕ ЗАФИКСИРОВАННОЙ В РЕЖИМЕ СИНХРОННОГО УПРАВЛЕНИЯ
Данная ошибка произошла, когда G28 было задано для ведущей оси при ожидании во время синхронного управления, но референтная позиция не была задана для ведомой оси.
0355
ОШИБКА ПАРАМЕТРА ИНДЕКСА ЗАДАННОЙ ОСИ КОМПЛЕКСНОГО УПРАВЛЕНИЯ.
Задан неверный номер оси комплексного управления (параметр ном. 8183).
0356
ПОСКОЛЬКУ ОСЬ ПЕРЕМЕЩАЕТСЯ, КОМПЛЕКСНОЕ УПРАВЛЕНИЕ ИСПОЛЬЗОВАТЬ НЕЛЬЗЯ
Пока ось при комплексном управлении перемещалась, была сделана попытка запуска или отмены с помощью сигнала выбора комплексного управления оси.
0357
ОШИБКА СОСТАВЛЕНИЯ ОСИ КОМПЛЕКСНОГО УПРАВЛЕНИЯ
Данная ошибка произошла, когда была сделана попытка выполнить комплексное управление для оси во время синхронного, комплексного или наложенного управления.
0359
G28 ЗАДАНО ПРИ НЕФИКСИРОВАННОМ РЕФЕРЕНТНОМ ПОЛОЖЕНИИ В КОМПЛ. РЕЖИМЕ
Данная ошибка произошла, когда команда G28 была задана сложной оси в ходе комплексного управления, но референтная позиция не была задана для другой части составления.
0360
ОШИБКА ЗАДАНИЯ ПАРАМЕТРА ИНДЕКСА ОСИ С НАЛОЖЕННЫМ УПРАВЛЕНИЕМ
Задан неверный номер оси наложенного управления (парам. ном. 8186).
0361
ПОСКОЛЬКУ ОСЬ ПЕРЕМЕЩАЕТСЯ, НАЛОЖЕННОЕ УПРАВЛЕНИЕ ИСПОЛЬЗОВАТЬ НЕЛЬЗЯ
Пока ось при наложенном управлении перемещалась, была сделана попытка запуска или отмены наложенного управления посредством сигнала выбора наложенного управления осью.
0362
ОШИБКА СОСТАВЛЕНИЯ ОСИ НАЛОЖЕННОГО УПРАВЛЕНИЯ
Данная ошибка произошла, когда:
1) Была произведена попытка выполнить наложенное управление для оси во время синхронного, комплексного или наложенного управления.
2) Была произведена попытка синхронизировать правнука для отношения предок-потомок-внук.
0363
КОМАНДА G28 ЗАДАНА ДЛЯ ВЕДОМОЙ ОСИ НАЛОЖЕННОГО УПРАВЛЕНИЯ.
Данная ошибка произошла, когда была дана команда G28 для ведомой оси наложенного управления при наложенном управлении.
0364
КОМАНДА G53 ЗАДАНА ДЛЯ ВЕДОМОЙ ОСИ НАЛОЖЕННОГО УПРАВЛЕНИЯ.
Данная ошибка произошла, когда была дана команда G53 для ведомой оси, перемещающейся при наложенном управлении.
0365
СЛИШКОМ МНОГО МАКСИМАЛЬНЫХ НОМЕРОВ ОСИ SV/SP НА КОНТУР
Неверно задано число управляемых осей или шпинделей для использования в одном контуре. Проверьте параметры ном. 981 и ном. 982. Если порождается этот сигнал тревоги, то состояние аварийного останова нельзя сбросить.
0369
ОШИБКА ФОРМАТА G31
1) Не задана ось либо заданы две или более осей в команде переключения по пределу крутящего момента (G31P98/P99).
2) Нельзя задать G31P90.
0370
ОШИБКА G31P/G04Q
1) Заданное значение адреса P для G31 вне диапазона. Адрес P имеет диапазон от 1 до 4 в функции многошагового пропуска.
2) Заданное значение адреса Q для G04 вне диапазона. Адрес Q имеет диапазон от 1 до 4 в функции многошагового пропуска.
3) P1 -4 для G31, или Q1 -4 для G04 было задана без опции функции многошагового пропуска.
4) Для G72 или G74 в постоянных циклах шлифования заданное значение адреса P вне диапазона. Адрес P имеет диапазон от 1 до 4 в функции многошагового пропуска. P1-4 было задано в G72 или G74 несмотря на отсутствие опции функции многошагового пропуска.
0372
НЕ ЗАВЕРШЕН ВОЗВРАТ НА РЕФЕРЕНТНУЮ ПОЗИЦИЮ
Была сделана попытка выполнить автоматический возврат на референтную позицию на ортогональной оси до завершения возврата на референтную позицию на наклонной оси. Однако, эта попытка не удалась, поскольку не был задан ручной возврат на референтную позицию при управлении наклонной осью или при автоматическом возврате на референтную позицию после включения питания. Сначала вернитесь на референтную позицию по наклонной оси, затем вернитесь на референтную позицию на ортогональной оси.
0373
НЕВЕРНЫЙ СИГНАЛ СКОРОСТНОГО ПРОПУСКА
В командах пропуска (G31, с G31P1 по G31P4) и командах выстоя (G04, с G04Q1 по G04Q4) один и тот же скоростной сигнал выбран в разных контурах^
0375
НЕВОЗМОЖНО УПРАВЛЕНИЕ НАКЛОННОЙ ОСЬЮ (СИНХ:СМЕШ:НАЛОЖ)
Управление осью наклона отключено для данной конфигурации оси.
1) Все задействованные оси при управлении наклонной осью не находятся в режиме синхронного управления. Либо необходимо выполнить настройки для обеспечения синхронного управления между наклонными осями, а также между ортогональными осями.
2) Все задействованные оси при управлении наклонной осью не находятся в режиме комплексного управления. Либо необходимо выполнить настройки для обеспечения комплексного управления между наклонными осями, а также между ортогональными осями.
3) Задействованные оси при управлении наклонной осью находятся в режиме наложенного управления.
0376
ПОСЛЕД. DCL: НЕВЕРНЫЙ ПАРАМЕТР
1) Если параметр ном. 1815#1 имеет значение «1», параметр ном. 2002#3 имеет значение «0»
2) Активирована функция регистрации абсолютной позиции. (Параметр ном.1815#5 имеет значение «1».)
0412
НЕВЕРНЫЙ G-КОД
Использован недопустимый G-код.
0445
НЕВЕРНАЯ ОПЕРАЦИЯ ОСИ
Команда позиционирования была выдана в режиме управления скоростью. Проверьте сигнал режима управления скоростью SV (Fn521).
0446
НЕВЕРНАЯ КОМАНДА В G96.1/G96.2/G96.3/G96.4
G96.1, G96.2, G96.3 и G96.4 заданы в блоке, включающем другие команды. Измените программу.
0447
НЕВЕРНЫЕ ДАННЫЕ НАСТРОЙКИ
Шпиндель, управляемый серводвигателем, задан неверно. Проверьте параметры для функции управления шпинделем при помощи серводвигателя.
0455
НЕВЕРНАЯ КОМАНДА ШЛИФОВАНИЯ
В постоянных циклах шлифования:
1) Не совпадают знаки команд I, J и K.
2) Не задана величина перемещения для оси шлифования.
0456
НЕВЕРНЫЙ ПАРАМЕТР ШЛИФОВАНИЯ
Неверно заданы параметры для постоянных циклов шлифования.
Вероятные причины приведены ниже.
1) Неверно задан номер оси шлифования (параметры от ном. 5176 до ном. 5179).
2) Неверно задан номер оси правки (параметры от ном. 5180 до ном. 5183).
3) Совпадают номера осей резания, шлифования и правки (только для серии M).
0601
НЕВЕРНАЯ ОПЕРАЦИЯ ОСИ ДЛЯ ШПИНДЕЛЯ С СЕРВОДВИГАТЕЛЕМ
Команда перемещения выполнена для шпинделя, управляемого серводвигателем. Измените программу.
0602
ОШИБКА КОМАНДЫ ВЫБОРА ШПИНДЕЛЯ (ШПИНДЕЛЬ СЕРВОДВИГАТЕЛЯ)
Не был правильно выбран исполнитель для шпинделя, управляемого серводвигателем.
1001
НЕВЕРНЫЙ РЕЖИМ УПРАВЛЕНИЯ ОСЬЮ
Неверный режим управления осью.
1013
НЕВЕРНАЯ ПОЗ. НОМ. ПРОГРАММЫ
Адрес O или N задан в неправильном месте (после макрооператора т. д.).
1014
НЕВЕРНЫЙ ФОРМАТ НОМЕРА ПРОГРАММЫ
Адрес O или N не сопровождается числом.
1016
НЕ НАЙДЕН КОНЕЦ БЛОКА
Код EOB (Конец блока) отсутствует в конце ввода программы в режиме MDI.
1077
ПРОГРАММА ИСПОЛЬЗУЕТСЯ
Сделана попытка исполнения на переднем плане программы, находящейся в режиме фонового редактирования. Редактируемую в настоящее время программу нельзя выполнить, поэтому прекратите редактирование и перезапустите выполнение программы.
1079
НЕ НАЙДЕН ПРОГРАММНЫЙ ФАЙЛ
Программа заданного номера файла не зарегистрирована во внешнем устройстве. (вызов подпрограммы внешнего устройства)
1080
ДУБЛИРОВАНИЕ ВЫЗОВА ПОДПРОГРАММЫ УСТРОЙСТВА
Еще один вызов подпрограммы внешнего устройства был выполнен из подпрограммы, после того как подпрограмма была вызвана подпрограммой внешнего устройства.
1081
ВЫЗОВ ПОДПРОГРАММЫ ВНЕШНЕГО УСТРОЙСТВА ОШИБКА РЕЖИМА
Вызов подпрограммы внешнего устройства невозможен в данном режиме.
1091
ДУБЛИРОВАНИЕ СЛОВА ВЫЗОВА ПОДПРОГРАММЫ
Больше одной команды вызова подпрограммы было задано в одном блоке.
1092
ДУБЛИРОВАНИЕ СЛОВА ВЫЗОВА МАКРОКОМАНДЫ
Больше одной команды вызова макрокоманды было задано в одном блоке.
1093
ДУБЛИРОВАНИЕ СЛОВА ЧУ И М99
Адрес, отличный от O, N, P или L, был задан в том же блоке, что и M99 в состоянии вызова модальной макрокоманды.
1095
СЛИШКОМ МНОГО АРГУМЕНТОВ ТИПА 2
Более десяти наборов аргументов I, J и K задано в аргументах типа-II (A, B, C, I, J, K, I, J, K,…) для пользовательских макрокоманд.
1096
НЕВЕРНОЕ ИМЯ ПЕРЕМЕННОЙ
Было задано неверное имя переменной. Код, который нельзя задать в качестве имени переменной, был задан. Команда [#_OFSxx] не соответствует типу (A или C) текущей используемой памяти коррекции на инструмент.
1097
СЛИШКОМ ДЛИННОЕ ИМЯ ПЕРЕМЕННОЙ
Заданное имя переменной слишком длинное.
1098
ОТСУТСТВУЕТ ИМЯ ПЕРЕМЕННОЙ
Заданное имя переменной нельзя использовать, поскольку оно не зарегистрировано.
1099
НЕВЕРНЫЙ ИНДЕКС[]
Индекс не задан для имени переменной, требующей индекса, заключенного в [ ].
Индекс задан для имени переменной, не требующей индекса, заключенного в [ ].
Значение, заключенное в заданные [ ], не попало в диапазон.
1100
ОТМЕНА БЕЗ МОДАЛЬНОГО ВЫЗОВА
Отмена режима вызова (G67) была задана, хотя режим постоянного вызова макрокоманд (G66) не был включен.
1101
НЕВЕРНОЕ ПРЕРЫВАНИЕ ОПЕРАТОРА ЧПУ
Было произведено прерывание в состоянии, в котором прерывание пользовательской макрокоманды, содержащей команду перемещения, нельзя было выполнить.
1115
ПЕРЕМЕННАЯ С ЗАЩИТОЙ ОТ ЧТЕНИЯ
Была произведена попытка использовать в пользовательской макрокоманде на правой стороне выражение переменной, которое можно использовать только на левой стороне выражения.
1120
НЕВЕРНЫЙ ФОРМАТ АРГУМЕНТА
Заданный аргумент в функции аргумента (ATAN, POW) ошибочен.
1124
ОТСУТСТВУЕТ ОПЕРАТОР DO
Команда DO, соответствующая команде END, отсутствовала в пользовательской макрокоманде.
1125
НЕВЕРНЫЙ ФОРМАТ ВЫРАЖЕНИЯ
Описание выражения в пользовательском макрооператоре содержит ошибку. Ошибка формата программного параметра. Окно, отображенное для ввода периодических данных по техобслуживанию или меню выбора наименований (станков), не соответствует типу данных.
1128
ПОРЯДКОВЫЙ НОМЕР ВНЕ ДИАПАЗОНА
Последовательность ном. пункта назначения при команде перехода в пользовательском макрооператоре GOTO находилась вне диапазона (диапазон действительных значений: от 1 до 99999).
1131
НЕ ХВАТАЕТ ОТКРЫВАЮЩЕЙ СКОБКИ
Число левых скобок ([) меньше числа правых скобок (]) в пользовательском макрооператоре.
1132
НЕ ХВАТАЕТ ЗАКРЫВАЮЩЕЙ СКОБКИ
Число правых скобок ([) меньше числа левых скобок (]) в пользовательском макрооператоре.
1133
ОТСУТСТВУЕТ ‘=’
Знак равенства (=) отсутствует в команде арифметических вычислений в пользовательском макрооператоре.
1134
ОТСУТСТВУЕТ
Отсутствует ограничитель (,) в пользовательском макрооператоре.
1137
ОШИБКА ФОРМАТА ОПЕРАТОРА IF
Формат, используемый в операторе IF в пользовательской макрокоманде, ошибочный.
1138
ОШИБКА ФОРМАТА ОПЕРАТОРА WHILE
Формат, используемый в операторе WHILE в пользовательской макрокоманде, ошибочный.
1139
ОШИБКА ФОРМАТА ОПЕРАТОРА SETVN
Формат, используемый в операторе SETVN в пользовательской макрокоманде, ошибочный.
1141
НЕВЕРНЫЙ СИМВОЛ В ИМЕНИ ПЕРМЕННОЙ
Оператор SETVN в пользовательской макрокоманде относится к символу, который нельзя использовать в имени переменной.
1142
СЛИШКОМ ДЛИННОЕ ИМЯ ПЕРЕМЕННОЙ (SETVN)
Имя переменной, используемой в SETVN операторе в пользовательской макрокоманде, превышает 8 символов.
1143
ОШИБКА ФОРМАТА ОПЕРАТОРА BPRNT/DPRNT
Формат, используемый в операторе BPRNT или в операторе DPRNT, ошибочный.
1144
ОШИБКА ФОРМАТА G10
Ввод данных для ном. L команды G10 или соответствующей функции не активирован.
Адреса задания данных P или R не заданы.
Был задан адрес, не связанный с установкой данных. Какой адрес задать различается в соответствии с L ном.
Знак, десятичная точка или диапазон заданного адреса ошибочны.
1160
ПЕРЕПОЛНЕНИЕ УПРАВЛЯЮЩИХ ДАННЫХ
Переполнение произошло в данных позиции в ЧПУ.
Данный сигнал тревоги также порождается, если целевое положение команды превышает максимальный ход в результате вычислений, таких как преобразование системы координат, коррекция или введение величины ручного вмешательства.
1180
ВСЕ ПАРАЛЛЕЛЬНЫЕ ОСИ В РЕЖИМЕ ОЖИДАНИЯ
Все оси, заданные для автоматической работы, находятся в режиме ожидания.
1196
НЕВЕРНЫЙ ВЫБОР ОСИ СВЕРЛЕНИЯ
Ось сверления, заданная для сверления в постоянном цикле сверления, неверна.
В блоке команды G-кода в постоянном цикле точка Z не задана для оси сверления.
1200
НЕВЕРНЫЙ ВОЗВРАТ НА НОЛЬ ИМПУЛЬСНОГО ШИФРАТОРА
Положение сетки нельзя было подсчитать при возврате на референтную позицию сетки при использовании системы сетки, поскольку сигнал одного оборота не был получен перед отходом от упора замедления.
Данный сигнал тревоги также возникает в том случае, если инструмент не достигает скорости подачи, которая превышает величину погрешности сервосистемы, предварительно заданную в параметре ном. 1841, прежде чем отработает ограничитель хода замедления (сигнал замедления *DEC опять становится «1»).
1202
ОТСУТСТВУЕТ КОМАНДА F В G93
F коды в режиме спецификации обратного времени (G93) не обрабатываются как модальные и должны быть заданы в отдельных блоках.
1223
НЕВЕРНЫЙ ВЫБОР ШПИНДЕЛЯ
Была сделана попытка выполнить команду, применимую к шпинделю, в то время как шпиндель, подлежащий управлению, задан неправильно.
1298
НЕВЕРНОЕ ПРЕОБРАЗОВАНИЕ ДЮЙМЫ/МЕТРИЧЕСКИЕ ЕДИНИЦЫ
Произошла ошибка при преобразовании дюймовых/метрических единиц.
1300
НЕВЕРНЫЙ АДРЕС
Номер оси был задан, хотя параметр не относится к оси при загрузке данных параметров или коррекции межмодульного смещения с ленты или при вводе параметра G10.
Ось ном. нельзя задать в данных коррекции межмодульного смещения.
1301
ОТСУТСТВУЕТ АДРЕС
Номер оси не был задан, хотя параметр относится к оси при загрузке данных параметров или коррекции межмодульного смещения с ленты или при вводе параметра G10.
Или данные ном. адреса ном или адрес задания адреса P или R не заданы.
1302
НЕВЕРНЫЙ НОМЕР ДАННЫХ
Был обнаружен несуществующий номер данных при загрузке данных параметров или коррекции межмодульного смещения с ленты или введением параметра G10.
Данный сигнал тревоги также порождается, если обнаружены недопустимые значения слов.
1303
НЕВЕРНЫЙ НОМЕР ОСИ
Был обнаружен адрес номера оси, превышающий максимальное число управляемых осекй при загрузке данных параметров или коррекции межмодульного смещения с ленты или введении параметра G10.
1304
СЛИШКОМ МНОГО ЗНАКОВ
Было обнаружено слишком много цифр при загрузке данных параметров или коррекции межмодульного смещения с ленты.
1305
ДАННЫЕ ВНЕ ДИАПАЗОНА
Были обнаружены данные вне диапазона при загрузке данных параметров или коррекции межмодульного смещения с ленты. Значения адресов задания данных, соответствующих L ном., пока ввод данных с помощью G10 был вне диапазона.
Данный сигнал тревоги также порождается, если программируемые слова ЧПУ содержат значения не из диапазона.
1306
ОТСУТСВУЕТ НОМЕР ОСИ
Параметр, требующий указания оси, обнаружен без номера оси (адрес A) при загрузке параметров с перфоленты.
1307
НЕВЕРНОЕ ИСПОЛЬЗОВАНИЕ ЗНАКА МИНУС
Были обнаружены данные с неверным обозначением при загрузке данных параметров или коррекции межмодульного смещения с ленты или введением параметра G10. Знак был задан для адреса, не поддерживающего использование знаков.
1308
ОТСУТСТВУЮТ ДАННЫЕ
Адрес, в конце которого не ставится числовое значение, был обнаружен при загрузке данных параметров или коррекции межмодульного смещения с ленты.
1329
НЕВЕРНЫЙ НОМЕР ГРУППЫ СТАНКОВ
Был обнаружен адрес номера групп станков, превышающий максимальное число управляемых станков при загрузке данных параметров или коррекции межмодульного смещения с ленты или введении параметра G10.
1330
НЕВЕРНЫЙ НОМЕР ШПИНДЕЛЯ
Был обнаружен адрес номера шпинделя, превышающий максимальное число управляемых шпинделей при загрузке данных параметров или коррекции межмодульного смещения с ленты или введении параметра G10.
1331
НЕВЕРНЫЙ НОМЕР КОНТУРА
Был обнаружен адрес номера контуров, превышающий максимальное число управляемых контуров при загрузке данных параметров или коррекции межмодульного смещения с ленты или введении параметра G10.
1332
ОШИБКА БЛОКИРОВКИ ЗАПИСИ ДАННЫХ
Невозможно загрузить данные при загрузке данных параметров, коррекции межмодульного смещения или рабочих координат введении параметра с ленты.
1333
ОШИБКА ЗАПИСИ ДАННЫХ
Не может записать данные при загрузке данных с ленты.
1470
ОТСУТСТВУЮТ ПАРАМЕТРЫ G40.1 -G42.1
Задание параметра, связанное с управлением нормальным направлением, неверное.
Номер оси для оси управления нормальным направлением задан в параметре ном. 5480, но этот номер оси входит в область номеров управляемых осей.
Ось, заданная как ось управления нормальным направлением, не задана как ось вращения (ROTx, бит 0 параметра ном. 1006) = 1 и ном. 1022=0).
Задайте скорость подачи, при которой должно выполняться вращение вокруг оси управления нормальным направлением движения, в параметре ном. 5481, в диапазоне от 1 до 15000 мм/мин.
1508
ДУБЛИРОВАНИЕ М КОДА(ИЗМЕНЕНИЕ НАПРАВЛЕНИЯ ДЕЛИТЕЛЬНОПОВОРОТНОГО СТОЛА)
Имеется функция, которой задан такой же М-код. (индексирование делительно-поворотного стола)
1509
ДУБЛИРОВАНИЕ М-КОДА (ОРИЕНТИРОВАНИЕ ОСИ ПОЗИЦИОНИРОВАНИЯ ШПИНДЕЛЯ)
Имеется функция, которой задан такой же М-код. (позиционирование шпинделя, ориентация)
1510
ДУБЛИРОВАНИЕ М-КОДА (ПОЗИЦИОНИРОВАНИЕ ОСИ ПОЗИЦИОНИРОВАНИЯ ШПИНДЕЛЯ)
Имеется функция, которой задан такой же М-код. (позиционирование шпинделя, позиционирование)
1511
ДУБЛИРОВАНИЕ М-КОДА (РАЗБЛОКИРОВКА ОСИ ПОЗИЦИОНИРОВАНИЯ ШПИНДЕЛЯ)
Имеется функция, которой задан такой же М-код. (позиционирование шпинделя, отмена режима)
1533
ПОТЕРЯ ЗНАЧИМОСТИ АДРЕСА F (G95)
Скорость подачи оси сверления отверстий, рассчитанная по кодам F и S, слишком медленная в режиме подачи за один оборот.
1534
ПЕРЕПОЛНЕНИЕ АДРЕСА F (G95)
Скорость подачи оси сверления отверстий, рассчитанная по кодам F и S, слишком быстрая в режиме подачи за один оборот.
1537
ПОТЕРЯ ЗНАЧИМОСТИ АДРЕСА F (ПЕРЕРЕГУЛИРОВАНИЕ)
Скорость, полученная применением перерегулирования к функции F, слишком медленная.
1538
ПЕРЕПОЛНЕНИЕ АДРЕСА F (ПЕРЕРЕГУЛИРОВАНИЕ)
Скорость, полученная применением перерегулирования к функции F, слишком быстрая.
1541
НУЛЕВОЙ S-КОД
«0» был задан в качестве S-кода.
1543
НЕВЕРНАЯ НАСТРОЙКА ПЕРЕДАЧИ
Передаточное число между шпинделем и шифратором положения или заданный номер шифратора положения импульсов неверен в функции позиционирования шпинделей.
1544
S-КОД ПРЕВЫСИЛ МАКСИМУМ
S команда превышает максимальное число вращений шпинделя.
1548
НЕВЕРНЫЙ РЕЖИМ ОСИ
Ось позиционирования шпинделя (серия T)/ ось контурного управления Cs была задана во время переключения режима управления осью.
1561
НЕВЕРНЫЙ УГОЛ ИНДЕКСИРОВАНИЯ
Заданный угол вращения не является целым множителем минимального угла индексирования.
1564
ОСЬ ДЕЛИТЕЛЬНО-ПОВОРОТНОГО СТОЛА СОВМЕСТНО С ДРУГОЙ ОСЬЮ
Ось делительно-поворотного стола и другая ось были заданы в одном блоке.
1567
ДУБЛИРОВАНИЕ КОМАНДЫ ОСИ ДЕЛИТЕЛЬНО-ПОВОРОТНОГО СТОЛА
Индексирование делительно-поворотного стола было задано при перемещении оси, или ось, для которой последовательность индексирования делительно-поворотного стола не была завершена.
1590
ОШИБКА TH
Во время считывания с устройства ввода обнаружена ошибка TH. Код, вызвавший при считывании ошибку TH, и количество операторов до него от блока можно проверить в окне диагностики.
1591
ОШИБКА TV
Ошибка TV обнаружена в единичном блоке. Проверка TV может быть отменена присвоением TVC в параметре ном. 0000#0 значения «0».
1592
КОНЕЦ ЗАПИСИ
Код EOR (Конец записи) задан в середине блока. Данный сигнал тревоги также порождается, если процентное отношение в конце программы ЧПУ считывается. Для функции перезапуска программы данный сигнал тревоги порождается, если заданный блок не найден.
1593
ОШИБКА ЗАДАНИЯ ПАРАМЕТРА EGB
Ошибка в задании параметра, связанного с EGB
1) Неверная настройка SYN, бит 0 параметра ном. 2011.
2) Ведомая ось, заданная G81, не задана как ось вращения. (ROT, бит 0 параметра ном. 1006)
3) Число импульсов за оборот (не задан параметр (ном. 7772 или ном. 7773)).
1594
ОШИБКА ФОРМАТА EGB
Ошибка в формате блока команды EGB
1) T (число зубьев) не задано в блоке G81.
2) В блоке G81 данные, заданные для T, L, P или Q, находятся вне соответствующего диапазона действительных значений.
3) В блоке G81 задана только одна из команд P и Q.
1595
НЕПРАВИЛЬНАЯ КОМАНДА В РЕЖИМЕ EGB
В ходе синхронизации с EGB была дана команда, которую нельзя было давать.
(1) Команда ведомой оси с использованием G27, G28, G29, G30, G33, G53 и т. д.
2) Команда преобразования дюймовых/метрических единиц с использованием G20, G21, и т.д.
1596
ПЕРЕПОЛНЕНИЕ EGB
Возникло переполнение в расчете коэффициента синхронизации.
1805
НЕВЕРНАЯ КОМАНДА
[Устройство ввода/вывода]
Была произведена попытка задать неверную команду в ходе обработки в устройстве ввода/вывода.
[Возврат на референтную позицию G30]
Номера адреса P для задания возврата на 2-ю, 3-ю и 4-ю референтную позицию — не 2, 3 и 4.
[Выстой единичного оборота]
Заданное вращение шпинделя равно «0», если задан выстой единичного оборота.
1806
НЕСООТВЕТСТВИЕ ТИПА УСТРОЙСТВА
Операция, невозможная на устройстве ввода/вывода, которая в настоящий момент выбрана в настройке, была задана. Данный сигнал тревоги также порождается, если перемотка файла задана несмотря на то, что устройство ввода/вывода не является кассетой FANUC.
1807
ОШИБКА НАСТРОЙКИ ПАРАМЕТРА
Задан неверный интерфейс ввода/вывода.
Настройки внешнего устройства ввода/вывода и скорость двоичной передачи, стоповый бит и настройки выбора протокола ошибочны.
1808
УСТРОЙСТВО ОТКРЫТО ДВАЖДЫ
Была сделана попытка открыть устройство, к которому была попытка доступа.
1820
НЕВЕРНОЕ СОСТОЯНИЕ СИГНАЛА DI
1) Предварительно заданный сигнал оси системы координат заготовки был изменен на «1» в состоянии, когда все оси на контуре, включая ось, по которой выполняется преднастройка для осей системы координат заготовки, не были остановлены, или в момент выполнения команды.
2) Когда был задан М-код для выполнения преднастройки с предварительно заданным сигналом для осей системы координат заготовки, не был введен сигнал для каждой оси системы координат заготовки.
3) Активна блокировка вспомогательной функции.
1823
ОШИБКА КАДРА (1)
Стоповый бит символа, полученный от устройства ввода/вывода, соединенный с интерфейсом считывающего перфоратора 1, не был обнаружен.
1830
DR ОТКЛ. (2)
Сигнал готовности ввода набора данных DR устройства ввода/вывода, подключенного к интерфейсу считывающего перфоратора 2, отключен.
1832
ОШИБКА ПЕРЕПОЛНЕНИЯ (2)
Следующий символ был получен от устройства ввода/вывода, подключенного к интерфейсу считывающего перфоратора 2 до того, как он смог считать полученный предварительно символ.
1833
ОШИБКА КАДРА (2)
Стоповый бит символа, полученный от устройства ввода/вывода, соединенный с интерфейсом считывающего перфоратора 2, не был обнаружен.
1834
ОШИБКА БУФЕРИЗАЦИИ (2)
ЧПУ получило более 10 символов данных от устройства ввода/ вывода, подключенного к интерфейсу считывающего перфоратора 2, хотя ЧПУ послало код останова (DC3) в ходе принятия данных.
1912
ОШИБКА ДРАЙВЕРА V-УСТРОЙСТВА (ОТКРЫТО)
При управлении драйвером устройства возникла ошибка.
1960
ОШИБКА ДОСТУПА (КАРТА ПАМЯТИ)
Неправильный доступ к карте памяти
Данный сигнал тревоги также порождается в ходе считывания, если считывание осуществляется до конца файла без регистрации кода EOR.
1961
НЕ ГОТОВО (КАРТА ПАМЯТИ)
Плата памяти не готова.
1962
КАРТА ЗАПОЛНЕНА (КАРТА ПАМЯТИ)
Карта памяти заполнена полностью.
1963
КАРТА ЗАЩИЩЕНА (КАРТА ПАМЯТИ)
Карта памяти защищена от записи.
1964
НЕ УСТАНОВЛЕНА (КАРТА ПАМЯТИ)
Невозможна установка карты памяти.
1965
КАТАЛОГ ЗАПОЛНЕН (КАРТА ПАМЯТИ)
Файл нельзя создать в корневом каталоге карты памяти.
1966
ФАЙЛ НЕ НАЙДЕН (КАРТА ПАМЯТИ)
Заданный файл не найден в карте памяти.
1967
ФАЙЛ ЗАЩИЩЕН (КАРТА ПАМЯТИ)
Карта памяти защищена от записи.
1968
НЕВЕРНОЕ ИМЯ ФАЙЛА (КАРТА ПАМЯТИ)
Неверное имя файла карты памяти
1969
НЕВЕРНЫЙ ФОРМАТ (КАРТА ПАМЯТИ)
Проверить имя файла.
1970
НЕВЕРНАЯ КАРТА (КАРТА ПАМЯТИ)
Нельзя использовать эту карту памяти.
1971
ОШИБКА УДАЛЕНИЯ (КАРТА ПАМЯТИ)
Во время удаления информации с карты памяти возникла ошибка.
1972
НИЗКИЙ ЗАРЯД БАТАРЕИ (КАРТА ПАМЯТИ)
Садится батарея карты памяти.
1973
ФАЙЛ УЖЕ СУЩЕСТВУЕТ
Файл, имеющий то же имя, уже существует на карте памяти.
2032
ОШИБКА ВСТРОЕННОЙ СЕТИ ETHERNET/СЕРВЕРА данных
От функции встроенной сети Ethernet/сервера данных вернулось сообщение об ошибке.
Подробные сведения см. в окне сообщений об ошибках встроенной сети Ethernet или сервера данных.
2051
#200-#499 НЕВЕРНЫЙ Р-КОД ОБЩЕГО ВВОДА МАКРОКОМАНД (НЕТ ОПЦИИ)
Была произведена попытка ввести общую переменную пользовательской макрокоманды, не существующей в системе.
2052
#500-#549P ОБЩИЙ ВЫБОР КОДА МАКРОКОМАНДЫ (НЕЛЬЗЯ ИСПОЛЬЗОВАТЬ SETVN)
Нельзя ввести имя переменной.
Нельзя использовать команду SETVN с общими переменными макрокоманды кода P #500 — #549.
2053
НОМЕР #30000 НЕ ИМЕЕТ СООТВЕТСТВИЯ
Была произведена попытка ввести переменную только Р-кода, не существующую в системе.
2054
НОМЕР #40000 НЕ ИМЕЕТ СООТВЕТСТВИЯ
Была произведена попытка ввести расширенную переменную только Р-кода, не существующую в системе.
4010
НЕВЕРНОЕ ДЕЙСТВИТЕЛЬНОЕ ЗНАЧЕНИЕ OBUF:
Действительное значение буфера вывода ошибочно.
5006
СЛИШКОМ МНОГО СЛОВ В ОДНОМ БЛОКЕ
Число слов в блоке превышает максимально допустимое. Максимум 26 слов. Однако эта цифра варьируется в зависимости от опций ЧПУ. Разделите команду на два блока.
5007
СЛИШКОМ БОЛЬШОЕ РАССТОЯНИЕ
Из-за коррекции, вычисления точки пересечения, интерполяции или подобных причин было задано расстояние перемещения, превышающее максимально допустимое расстояние.
Проверьте заданные координаты или величины коррекции.
5009
НУЛЕВОЙ ПАРАМЕТР (ХОЛОСТОЙ ХОД)
Параметр скорости подачи холостого хода ном. 1410 или параметр максимальной скорости рабочей подачи ном. 1430 для каждой оси был установлен на 0.
5010
КОНЕЦ ЗАПИСИ
Код EOR (Конец записи) задан в середине блока. Данный сигнал тревоги также порождается, если процентное отношение в конце программы ЧПУ считывается.
5011
НУЛЕВОЙ ПАРАМЕТР (МАКС. РЕЗАНИЕ)
Параметр максимальной скорости рабочей подачи ном. 1430 был установлен на 0.
5014
НЕ НАЙДЕНЫ ДАННЫЕ ТРАССИРОВКИ
Нельзя произвести трассировку из-за отсутствия данных трассировки.
5016
НЕВЕРНАЯ КОМБИНАЦИЯ М-КОДОВ
В блоке заданы М-коды, принадлежащие одной группе. Или же М-код, который необходимо задать в блоке без других М-кодов, задан в блоке вместе с другими М-кодами.
5018
ОШИБКА СКОРОСТИ ШПИНДЕЛЯ ПРИ ПОЛИГОНАЛЬНОЙ ОБРАБОТКЕ
В режиме G51.2 скорость шпинделя или полигональной синхронной оси либо превышает значение фиксации, либо слишком низкая. Таким образом, невозможно поддерживать заданное соотношение скорости вращения.
Для полигональной обточки между шпинделями: Более подробные сведения о причине этого сигнала тревоги см. в DGN ном. 471.
5020
ОШИБКА ПАРАМЕТРА ПЕРЕЗАПУСКА
Недействительное значение задано в параметре ном. 7310, указывающем порядок осей для перемещения по ним инструмента в позицию возобновления обработки на холостом ходу. В этом параметре можно задавать значение в диапазоне от 1 до числа управляемых осей.
5046
НЕВЕРНЫЙ ПАРАМЕТР (КОРРЕКЦИЯ ПРЯМОЛИНЕЙНОСТИ)
Заданное значение параметра, связанное с простой коррекцией
прямолинейности, содержит ошибку.
Возможные причины:
1) Несуществующий номер оси задан в параметре оси перемещения или коррекции.
2) Неправильное соотношение величины номеров точек коррекции прямолинейности.
3) Не обнаружена точка простой коррекции прямолинейности между крайними удаленными точками коррекции в отрицательной и положительной областях.
4) Коррекция на точку коррекции слишком велика или слишком мала.
5064
РАЗЛИЧНЫЕ ЕДИНИЦЫ ОСЕЙ
Круговая интерполяция была задана в плоскости, состоящей из осей, имеющих различные системы приращений.
5065
РАЗЛИЧНЫЕ ЕДИНИЦЫ ОСЕЙ (ОСЬ PMC)
Оси, имеющие различные системы приращений, были заданы в одной и той же группе DI/DO для осевого управления с помощью РМС. Измените настройку параметра ном. 8010.
5073
НЕТ ДЕСЯТИЧНОЙ ТОЧКИ
В адресе, предусматривающем десятичную точку, не задана десятичная точка.
5074
ОШИБКА ДУБЛИРОВАНИЯ АДРЕСА
В одном блоке один и тот же адрес задан два или более раз. Или в одном блоке задано два или более G-кодов, принадлежащих к одной группе.
5110
НЕВЕРНЫЙ G-КОД (РЕЖИМ КОНТ. УПР. AI)
Недопустимый G-код был задан при управлении с расширенным предпросмотром, управлении AI с расширенным предпросмотром или контурном управлении AI.
5131
НЕСОВМЕСТИМАЯ КОМАНДА ЧПУ
Управление осью PMC и интерполяция в полярных координатах были заданы одновременно.
5195
НЕВОЗМОЖНО ОПРЕДЕЛИТЬ НАПРАВЛЕНИЕ
Измерение недействительно при функции прямого ввода измеренного значения коррекции на инструмент B.
[Для 1-контактного ввода]
1) Направление записанных импульсов непостоянно.
Например, состояние останова может быть задано во время режима записи коррекции, может быть введено состояние отключения сервосистемы, или возможно изменение направления.
2) Инструмент перемещается вдоль двух осей (ось X и ось Y). [Для определения направления перемещения при 4-контактном вводе]
1) Направление записанных импульсов непостоянно.
Например, состояние останова может быть задано во время режима записи коррекции, может быть введено состояние отключения сервосистемы, или возможно изменение направления.
2) Инструмент перемещается вдоль двух осей (ось X и ось Z).
3) Направление, указанное сигналом записи коррекции на инструмент, не соответствует направлению перемещения оси.
5220
РЕЖИМ РЕГУЛИРОВКИ РЕФЕРЕНТНОЙ ТОЧКИ
Для линейной шкалы кодировки расстояния I/F параметр автоматического задания референтной точки (ном.1819#2) имеет значение «1». Переместить станок на референтную позицию вручную и выполнить возврат на референтную позицию вручную.
5257
G41/G42 ЗАПРЕЩЕНЫ В РЕЖИМЕ MDI
Коррекция на радиус инструмента/на радиус вершины инструмента была задана в режиме MDI. (В зависимости от настройки параметра MCR (ном. 5008#4))
5303
ОШИБКА СЕНСОРНОЙ ПАНЕЛИ
Сенсорная панель не подключена правильно или не может быть инициализирована при включении питания. Устраните причину, затем снова включите питание.
5305
НЕВЕРНЫЙ НОМЕР ШПИНДЕЛЯ
В функции выбора шпинделя по адресу P для управления несколькими шпинделями,
1) Адрес P не задан.
2) P-код для выбора шпинделя не задан в параметре ном. 3781.
3) Задан неверный G-код, невозможный с командой S_P_;.
4) Многошпиндельное управление не активировано, так как бит 1 (EMS) параметра ном. 3702 имеет значение 1.
5) Номер усилителя шпинделя для каждого шпинделя не задан в параметре ном. 3717.
6) Команда шпинделя выполнена из контура, в котором она запрещена (параметр ном. 11090).
7) Неверная настройка параметра ном. 11090.
5306
ОШИБКА ПЕРЕКЛЮЧЕНИЯ РЕЖИМА
Не удалось выполнить переключение режима при активации. Попытка выполнить быстрый вызов макропрограммы была сделана не в состоянии сброса или во время сброса либо аварийного останова.
5329
М98 И КОМАНДА ЧПУ В ОДНОМ БЛОКЕ
Вызов подпрограммы, не являющейся единичным блоком, был задан в режиме постоянного цикла.
5339
КОМАНДА В НЕВЕРНОМ ФОРМАТЕ ВЫПОЛНЕНА ПРИ
СИНХ./СМЕШ./НАЛОЖ. УПРАВЛЕНИИ.
1. Недействительно значение P, Q или L, заданное посредством G51.4/G50.4/G51.5/G50.5/G51.6/G50.6.
2. Двойное значение задан параметром ном. 12600.
5346
ВОЗВРАТ НА РЕФЕРЕНТНУЮ ТОЧКУ
Не выполнено назначение координат для оси контурного управления
Cs. Выполните ручной возврат на референтную позицию.
1) Если назначение координат Cs выполнено для оси Cs, для которой сигнал состояния референтной позиции оси CsCSPENx имеет значение 0
2) Если данные позиции не отправлены усилителем шпинделя
3) Если состояние отключения сервосистемы введено во время запуска назначения координат оси Cs
4) Если состояние аварийного останова введено во время назначения координат оси Cs
5) Если ось Cs находится в режиме синхронного или наложенного управления
6) Если предпринята попытка отменить комплексное управление для оси Cs во время назначения координат оси Cs
7) Если предпринята попытка запустить синхронное, комплексное или наложенное управление для оси Cs во время назначения координат оси Cs
5362
ПРЕОБРАЗОВАНИЕ ДЮЙМ/ММ В РЕФ. ПОЗ.
Преобразование дюймы/метрические единицы было выполнено в позиции, отличной от референтной позиции. Выполните преобразование дюймы/метрические единицы после возврата на референтную позицию.
5391
НЕВОЗМОЖНО ИСПОЛЬЗОВАТЬ G92
Невозможно задать настройку системы координат заготовки G92.
1) После того, как коррекция на длину инструмента была изменена коррекция по типу смещения на длину инструмента, команда G92 была задана без абсолютной команды.
2) Команда G92 была задана в блоке, содержащем G49.
5395
ПРЕВЫШЕНИЕ КОЛИЧЕСТВА ОСЕЙ CS
Число осей, назначаемых для осевого контурного управления Cs, превышает максимально допустимое в системе число. Проверьте параметр ном. 1023. При возникновении этого сигнала тревоги состояние аварийного останова нельзя сбросить.
5445
НЕВОЗМОЖНО ЗАДАТЬ ПЕРЕМЕЩЕНИЕ В G39
Круговая интерполяция в углу (G39) для коррекции на радиус инструмента/на радиус вершины инструмента задана не отдельно, а с командой перемещения.
5446
ИЗБЕЖАНИЕ В G41/G42 НЕВОЗМОЖНО
Поскольку отсутствует вектор избежания столкновения, функция избежания столкновения для коррекции на радиус инструмента/на радиус вершины инструмента не работает.
5447
ОПАСНОЕ ИЗБЕЖАНИЕ В G41/G42
Операция функции избежания столкновения для коррекции на радиус инструмента/на радиус вершины инструмента ведет к опасности.
5448
ИЗБЕЖАНИЕ СТОЛКНОВЕНИЯ В G41/G42
В функции избежания столкновения для коррекции на радиус инструмента/на радиус вершины инструмента созданный вектор избежания столкновения приводит к последующему столкновению.
-
01-18-2014, 12:01 AM
#1

Registered
Hi every body
I have a problem with CNC lathe machine
when I try to change the tool I hear disengage (or engage I ‘m not sure) then the tool rotate for a few seconds as normally,
but the problem is the turret doesn’t rotateand I receive this message
1044 HY.SA TURRET POSITION ERRORand after a few seconds
1041 TURRET INDEX OVERTIMEmy machine made by Victor taichung and its model is Vturn II-20
and its system is Fanuc OI-TC
the turret rotated by servo motor and made by sauterthanks in advance…
-
01-19-2014, 04:02 PM
#2
Registered
The tool rotates but the turret does not? Do not understand what you mean about that. If the turret disengages but doesn’t move you may have a broken drive belt. Also check to see if the proximity switch for turret unlocked is on and the sw for locked is off when it is disengaged.
-
01-19-2014, 05:15 PM
#3
Registered
Originally Posted by spark-el
The tool rotates but the turret does not? Do not understand what you mean about that. If the turret disengages but doesn’t move you may have a broken drive belt. Also check to see if the proximity switch for turret unlocked is on and the sw for locked is off when it is disengaged.
thankx for your reply
the turret rotate by the same servo motor which operate the rotary milling or drilling tool
-
01-20-2014, 06:39 PM
#4
Registered
Hi,
The VDI live-tools of a Sauter-turret have a «lock» position.
When you rotate (unlock) a live-tool by hand it causes an alarm.
Rotate it till you feel the «lock» and replace it on the turret.Your Electrical (Victor) manual contains a chapter how to rotate the turret when above solution dosn’t work.
On my Doosan with 2 Sauter turrets;1 — [Single Block]
2 — [Cycle Start and Spindle Stop] , this unlocks the turret.
3 — [Manual]
4 — Rotate the [Manual Pulse Generator] on [X] (x100).Now the turret rotates to the right position.
Regards,
Heavy_Metal.
-
01-20-2014, 09:07 PM
#5
Registered
Originally Posted by Heavy_Metal
Hi,
The VDI live-tools of a Sauter-turret have a «lock» position.
When you rotate (unlock) a live-tool by hand it causes an alarm.
Rotate it till you feel the «lock» and replace it on the turret.Your Electrical (Victor) manual contains a chapter how to rotate the turret when above solution dosn’t work.
On my Doosan with 2 Sauter turrets;1 — [Single Block]
2 — [Cycle Start and Spindle Stop] , this unlocks the turret.
3 — [Manual]
4 — Rotate the [Manual Pulse Generator] on [X] (x100).Now the turret rotates to the right position.
Regards,
Heavy_Metal.dear Heavy_Metal
thankx ,I will try this tomorrow .
but I don’t have Electrical (Victor) manual , can you send it please.
-
01-24-2014, 07:36 PM
#6
please check when your turret is unclamped if X16.3 is 0 or not
if this sensor for turret clamp is not 0 than the motor is not rotating the turret
also if you can say what type of sauter turret you have
normaly there is a plate on it which indicate the type —is usefull for me
also say what is the serial number of the machine.
if you have pneumatic engage of the rotating tool ,maybe the sensor that indicates the disengage of the coupling is not ok or the sensor is bad.
also if the disengage is not confirmed the turret will not rotate for not braking the rotating tool tail.
i have a lot of victor machine on service and i can help you but i need the information above.
-
02-05-2014, 09:56 PM
#7
Registered
Originally Posted by zavateandu
please check when your turret is unclamped if X16.3 is 0 or not
if this sensor for turret clamp is not 0 than the motor is not rotating the turret
also if you can say what type of sauter turret you have
normaly there is a plate on it which indicate the type —is usefull for me
also say what is the serial number of the machine.
if you have pneumatic engage of the rotating tool ,maybe the sensor that indicates the disengage of the coupling is not ok or the sensor is bad.
also if the disengage is not confirmed the turret will not rotate for not braking the rotating tool tail.
i have a lot of victor machine on service and i can help you but i need the information above.sorry for replying too late
Attachment 222270
-
02-05-2014, 11:39 PM
#8
Registered
Sauter turret
Hi Noureddin,
Here a PDF for your 05.676.216 Sauter turret, and a PDF for a Victor/Sauter turret correction, not your model.
Sorry, I made a mistake in how to unlock the Sauter-turrets on my Doosan.
1 — [Single Block]
2 — [Feed Hold and Spindle Stop] , this unlocks the turret, not [Cycle Start and Spindle Stop].
3 — [Manual]
4 — Rotate the [Manual Pulse Generator] on [X] (step X100).Now the turret rotates to the right position, maybe this is not for the Victor
Regards,
Heavy_Metal.
-
12-21-2021, 07:42 AM
#9
Dear Mentor’s.
We having fanuc series oi-mate TD controle.
I’m facing one troubleshooting in yesterday was «Check Turret Station» alarm while go up X-axis Homing in CNC Lathe Machine. This alarm generates continuosly during home position(G28 U0 W0 in Auto cycle. Pls suggest how to escape from this thread..
-
12-21-2021, 09:07 AM
#10
Flies Fast
Originally Posted by Manashettishivu
Dear Mentor’s.
We having fanuc series oi-mate TD controle.
I’m facing one troubleshooting in yesterday was «Check Turret Station» alarm while go up X-axis Homing in CNC Lathe Machine. This alarm generates continuosly during home position(G28 U0 W0 in Auto cycle. Pls suggest how to escape from this thread..#1…. you should start your own thread
This thread has no bearing on your problem.
#2…. alarm is telling you to disable G96 before doing a toolchange ie G97S500


 in Auto cycle. Pls suggest how to escape from this thread..
in Auto cycle. Pls suggest how to escape from this thread..
 Loading…
Loading…
![]()
CNC SYSTEM
OSP-P300S/P300L
ALARM & ERROR LIST
(1st Edition)
Pub No. 5921-E (LE37-006-R1) Nov. 2011

5921-E P-(i)
SAFETY PRECAUTIONS
SAFETY PRECAUTIONS
The machine is equipped with safety devices which serve to protect personnel and the machine itself from hazards arising from unforeseen accidents. However, operators must not rely exclusively on these safety devices: they must also become fully familiar with the safety guidelines presented below to ensure accidentfree operation.
This instruction manual and the warning signs attached to the machine cover only those hazards which Okuma can predict. Be aware that they do not cover all possible hazards.
1.Precautions Relating to Installation
(1)Please be noted about a primary power supply as follows.
Do not draw the primary power supply from a distribution panel that also supplies a major noise source (for example, an electric welder or electric discharge machine) since this could cause malfunction of the CNC unit.
If possible, connect the machine to a ground not used by any other equipment. If there is no choice but to use a common ground, the other equipment must not generate a large amount of noise (such as an electric welder or electric discharge machine).
(2)Installation Environment
Observe the following points when installing the control enclosure.
Make sure that the CNC unit will not be subject to direct sunlight.
Make sure that the control enclosure will not be splashed with chips, water, or oil.
Make sure that the control enclosure and operation panel are not subject to excessive vibrations or shock.
The permissible ambient temperature range for the control enclosure is 5 to 40°C (41 to 104°F).
The permissible ambient humidity range for the control enclosure is relative humidity 50% or less at 40°C (104°F) (no condensation).
The maximum altitude at which the control enclosure can be used is 1000 m (3281ft.).
2.Points to Check before Turning on the Power
(1)Close all the doors of the control enclosure and operation panel to prevent the entry of water, chips, and dust.
(2)Make absolutely sure that there is nobody near the moving parts of the machine, and that there are no obstacles around the machine, before starting machine operation.
(3)When turning on the power, turn on the main power disconnect switch first, then the CONTROL ON switch on the operation panel.

5921-E P-(ii)
SAFETY PRECAUTIONS
3.Precautions Relating to Manual/Continuous Operation
(1)Follow the instruction manual during operation.
(2)Do not operate the machine with the front cover, chuck cover, or another protective cover removed.
(3)Close the front cover before starting the machine.
(4)When machining the initial workpiece, check for machine operations, run the machine under no load to check for interference among components, cut the workpiece in the single block mode, and then start continuous operation.
(5)Ensure your safety before rotating the spindle or moving a machine part.
(6)Do not touch chips or workpiece while the spindle is rotating.
(7)Do not stop a rotating part with hand or another means.
(8)Check that the condition of hydraulic chuck jaws as mounted, operating pressure, and maximum permissible revolving speed.
(9)Check the condition and location of the cutting tool as mounted.
(10)Check the tool offset value.
(11)Check the zero offset value.
(12)Check that the SPINDLE OVERRIDE and FEEDRATE OVERRIDE dials on the NC operation panel are set to 100%.
(13)When moving the turret, check the software limits for X- and Z-axes or the locations of limit switch dogs to prevent interference with the chuck and tailstock.
(14)Check the location of the turret.
(15)Check the location of the tailstock.
(16)Cut workpieces with a transmitted power and torque within the permissible range.
(17)Chuck each workpiece firmly.
(18)Check that the coolant nozzle is properly located.
4.On Finishing Work
(1)On finishing work, clean the vicinity of the machine.
(2)Return the ATC, APC and other equipment to the predetermined retraction position.
(3)Always turn off the power to the machine before leaving it.
(4)To turn off the power, turn off the CONTROL ON switch on the operation panel first, then the main power disconnect switch.

5921-E P-(iii)
SAFETY PRECAUTIONS
5.Precautions during Maintenance Inspection and When Trouble Occurs
In order to prevent unforeseen accidents, damage to the machine, etc., it is essential to observe the following points when performing maitenance inspections or during checking when trouble has occurred.
(1)When trouble occurs, press the emergency stop button on the operation panel to stop the machine.
(2)Consult the person responsible for maintenance to determine what corrective measures need to be taken.
(3)If two or more persons must work together, establish signals so that they can communicate to confirm safety before proceeding to each new step.
(4)Use only the specified replacement parts and fuses.
(5)Always turn the power off before starting inspection or changing parts.
(6)When parts are removed during inspection or repair work, always replace them as they were and secure them properly with their screws, etc.
(7)When carrying out inspections in which measuring instruments are used — for example voltage checks — make sure the instrument is properly calibrated.
(8)Do not keep combustible materials or metals inside the control enclosure or terminal box.
(9)Check that cables and wires are free of damage: damaged cables and wires will cause current leakage and electric shocks.
(10)Maintenance inside the Control Enclosure
a.Switch the main power disconnect switch OFF before opening the control enclosure door.
b.Even when the main power disconnect switch is OFF, there may some residual charge in the MCS drive unit (servo/spindle), and for this reason only service personnel are permitted to perform any work on this unit. Even then, they must observe the following precautions.
MCS drive unit (servo/spindle)
The residual voltage discharges two minutes after the main switch is turned OFF.
c.The control enclosure contains the NC unit, and the NC unit has a printed circuit board whose memory stores the machining programs, parameters, etc. In order to ensure that the contents of this memory will be retained even when the power is switched off, the memory is supplied with power by a battery. Depending on how the printed circuit boards are handled, the contents of the memory may be destroyed and for this reason only service personnel should handle these boards.

5921-E P-(iv)
SAFETY PRECAUTIONS
(11)Periodic Inspection of the Control Enclosure
a.Cleaning the cooling unit
The cooling unit in the door of the control enclosure serves to prevent excessive temperature rise inside the control enclosure and increase the reliability of the NC unit. Inspect the following points every three months.
Is the fan motor inside the cooling unit working?
The motor is normal if there is a strong draft from the unit.
Is the external air inlet blocked?
If it is blocked, clean it with compressed air.
6.General Precautions
(1)Keep the vicinity of the machine clean and tidy.
(2)Wear appropriate clothing while working, and follow the instructions of someone with sufficient training.
(3)Make sure that your clothes and hair cannot become entangled in the machine. Machine operators must wear safety equipment such as safety shoes and goggles.
(4)Machine operators must read the instruction manual carefully and make sure of the correct procedure before operating the machine.
(5)Memorize the position of the emergency stop button so that you can press it immediately at any time and from any position.
(6)Do not access the inside of the control panel, transformer, motor, etc., since they contain highvoltage terminals and other components which are extremely dangerous.
(7)If two or more persons must work together, establish signals so that they can communicate to confirm safety before proceeding to each new step.
5921-E P-(v)
SAFETY PRECAUTIONS
7.Symbols Used in This Manual
The following warning indications are used in this manual to draw attention to information of particular importance. Read the instructions marked with these symbols carefully and follow them.

5921-E P-(i)
INTRODUCTION
INTRODUCTION
Before using this NC unit, read this manual thoroughly in order to ensure correct use.
This manual explains how to use and maintain the control so that it will deliver its full performance and maintain accuracy over the long term.
You must pay particular attention to the cautions given in this manual; read them carefully and make sure you fully understand them before operating the NC.
|
5921-E P-(i) |
|||
TABLE OF CONTENTS |
|||
|
TABLE OF CONTENTS |
|||
|
SECTION 1 CLASSIFICATION OF ALARMS ………………………………………………….. |
1 |
||
|
1-1. |
Alarm Classifications …………………………………………………………………………………………… |
1 |
|
|
1-2. |
Object Number and Object Message …………………………………………………………………….. |
2 |
|
|
1-2-1. |
Alarm Codes………………………………………………………………………………………….. |
3 |
|
|
1-2-2. |
Bit conversion method…………………………………………………………………………….. |
3 |
|
|
1-2-3. |
How to check alarm contents …………………………………………………………………… |
4 |
|
SECTION 2 |
ALARM P………………………………………………………………………………….. |
5 |
|
SECTION 3 |
ALARM A………………………………………………………………………………… |
74 |
|
SECTION 4 |
ALARM B………………………………………………………………………………. |
249 |
|
SECTION 5 |
ALARM C………………………………………………………………………………. |
464 |
|
SECTION 6 |
ALARM D………………………………………………………………………………. |
544 |
|
SECTION 7 |
ERROR…………………………………………………………………………………. |
645 |
|
SECTION 8 |
APPENDIX ……………………………………………………………………………. |
754 |
|
8-1. Factor Classification Code/Factor Parameter………………………………………………………. |
754 |
|
|
8-1-1. Factor Classification Code/Factor Parameter (for Machine) ……………………… |
754 |

5921-E P-1
SECTION 1 CLASSIFICATION OF ALARMS
SECTION 1 CLASSIFICATION OF ALARMS
Alarms related with the OSP are classified into five types such as Alarm P, A, B, C and D.
1-1. Alarm Classifications
|
Alarm |
Machine Conditions When ALARM Lamp |
Operative NC Functions Thereafter |
||
|
Comes ON |
||||
|
P |
Stops NC operation. |
All NC functions are inoperative. |
||
|
Concerning the control, cancel the alarm |
||||
|
axis feed |
||||
|
by turning power on again after turning it |
||||
|
Stops; |
spindle rotation |
|||
|
off once. |
||||
|
coolant supply |
||||
|
Shuts off power supply |
to X- and Z-axis |
|||
|
servo drives. |
||||
|
Alarm display is displayed on the operation |
||||
|
panel. |
||||
|
A |
axis feed |
Operations for display are possible. |
||
|
Stops; |
The machine remains inoperative until |
|||
|
spindle rotation |
||||
|
the control is reset and the alarm |
||||
|
coolant supply |
||||
|
canceled. |
||||
|
Shuts off power supply to X- and Z-axis |
||||
|
servo drives. |
||||
|
Alarm display is given on the operation |
||||
|
panel. |
||||
|
B |
The commands in the active block are |
Operations for display are possible. |
||
|
completed. |
The machine remains inoperative until |
|||
|
the control is reset and the alarm |
||||
|
Spindle rotation and coolant supply do not |
||||
|
stop. |
canceled. |
|||
|
Power supply to X- and Z-axis servo drives |
||||
|
is not shut off. |
||||
|
Alarm display is given on the operation |
||||
|
panel. |
||||
|
C |
The part program being run is executed to |
Operations for display are possible. |
||
|
the end (up to M02 command). |
No new program can be run until the |
|||
|
control is reset and the alarm is |
||||
|
Spindle rotation and coolant supply do not |
||||
|
stop. |
canceled. |
|||
|
Power supply to X- and Z-axis servo drives |
||||
|
is not shut off. |
||||
|
Alarm display is given on the operation |
||||
|
panel. |
||||
|
D |
This alarm does not have any influence on |
Operations on the operation panel are all |
||
|
the machine operation. |
operative. Alarm cannot be canceled |
|||
|
Alarm display is given on the operation |
unless the cause of the alarm is |
|||
|
panel. |
removed. |
|||

5921-E P-2
SECTION 1 CLASSIFICATION OF ALARMS
Display Format of Alarm P, A, B, C and D
ALARM-A
Alarm number
Object number
Alarm level
Alarm message
Object message
Alarm code
Alarm character-string
LE37006R0100300020001
1-2. Object Number and Object Message
The object number and the object message show the programming system and the control axis where the alarm has occurred by the number and message as shown in the table blow:
|
Object No. |
Meaning |
Object message |
Notes |
|
|
None |
No classification |
None |
||
|
01 |
System 1 |
“A side” or “1-A sd” |
1st spindle and turret A |
|
|
02 |
System 2 |
“B side” or “1-B sd” |
1st spindle and turret B |
|
|
03 |
System 3 |
“2-A sd” |
2d spindle and turret A |
|
|
04 |
System 4 |
“2-B sd” |
2d spindle and turret B |
|
|
11 |
1st X-axis |
“XAaxis” or “X-axis” |
||
|
12 |
1st Y-axis |
“YAaxis” or “Y-axis” |
||
|
13 |
1st Z-axis |
“ZAaxis” or “Z-axis” |
||
|
16 |
1st W-axis |
“W-axis” |
||
|
19 |
1st C-axis |
“C-axis” or “Caxis1” |
||
|
20 |
1st S-axis |
“SPDL” or “SPDL-1” |
||
|
21 |
1st T-axis |
“TAaxis” or “T-axis” |
||
|
22 |
1st M-axis |
“MAaxis” or “M-axis” |
||
|
31 |
2d |
X-axis |
“XBaxis” |
|
|
32 |
2d |
Y-axis |
“YBaxis” |
|
|
33 |
2d |
Z-axis |
“ZBaxis” |
|
|
39 |
2d |
C-axis |
“Caxis2” |
|
|
40 |
2d |
S-axis |
“SPDL-2” |
Sub spindle, pick-off spindle |
|
41 |
2d |
T-axis |
“TBaxis” |
|
|
42 |
2d |
M-axis |
“MBaxis” |
|
|
53 |
3d |
Z-axis |
“ZCaxis” |
LT series |
As indicated above, the object numbers and messages to be used are determined by the machine specifications.
![]()
5921-E P-3
SECTION 1 CLASSIFICATION OF ALARMS
1-2-1. Alarm Codes
In this manual, alarm codes are explained using such as «X», «XX», and «XXYY».
Explanation is given in the following methods:
(1)The alarm code indicated in this text can be used directly as the key to find the contents of error.
(2)The alarm code indicated in this text should first be converted into bit expression (pattern), which is then used as the key to find the contents of error.
In the case of 2), the procedure to convert the alarm code into bit pattern is shown below.
1-2-2. Bit conversion method
|
Alarm Code |
Alarm Code |
||||||||
|
(Expressed in |
Bit Pattern |
(Expressed in |
Bit Pattern |
||||||
|
hexadecimal) |
hexadecimal) |
||||||||
|
0 |
0 |
0 |
0 |
0 |
8 |
1 |
0 |
0 |
0 |
|
1 |
0 |
0 |
0 |
1 |
9 |
1 |
0 |
0 |
1 |
|
2 |
0 |
0 |
1 |
0 |
A |
1 |
0 |
1 |
0 |
|
3 |
0 |
0 |
1 |
1 |
B |
1 |
0 |
1 |
1 |
|
4 |
0 |
1 |
0 |
0 |
C |
1 |
1 |
0 |
0 |
|
5 |
0 |
1 |
0 |
1 |
D |
1 |
1 |
0 |
1 |
|
6 |
0 |
1 |
1 |
0 |
E |
1 |
1 |
1 |
0 |
|
7 |
0 |
1 |
1 |
1 |
F |
1 |
1 |
1 |
1 |
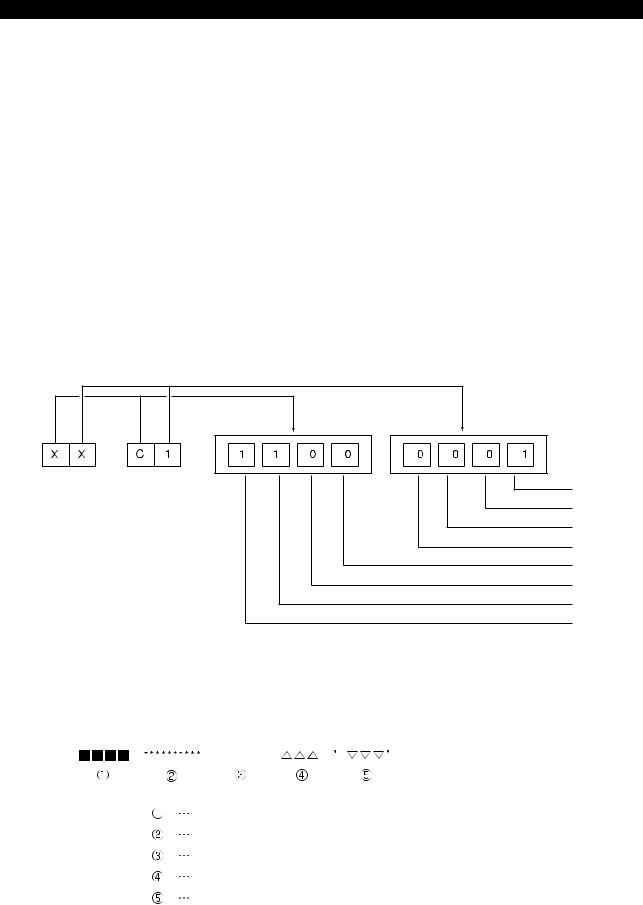
5921-E P-4
SECTION 1 CLASSIFICATION OF ALARMS
1-2-3. How to check alarm contents
The method to find the details of the alarm indicated by the bit pattern is explained below using an example.
Example:
[Code] XX
XX bit0->Battery error
bit1->EC I/O power shut off error
bit2->ECC error
bit3->Not used
bit4->Not used
bit5->EDRQ INT signal
bit6->ECP INT signal
bit7->ECP RUN signal
If an alarm occurs, a hexadecimal number is displayed.
If «$C1» is displayed, for example, first convert this «$C1» into bits.
bit 0 bit 1 bit 2 bit 3 bit 4 bit 5 bit 6 bit 7
After the conversion, it is known that Bit0, Bit6, and Bit7 are ON. See the information above and you will find that these error codes
correspond to «battery error», «ECP INT signal», and «ECP RUN signal», respectively.
Error Display Format
ERROR
Error number
Error message
Indication of ERROR
Error code
Error character-string
LE37006R0100300060001
5921-E P-5
SECTION 2 ALARM P |
|||
|
SECTION 2 |
ALARM P |
||
|
0700 |
NC start-up error ………………………………………………………………………………. |
10 |
|
|
0701 |
P100-Menu initialization failure …………………………………………………………… |
10 |
|
|
0702 |
Power failure upon start-up ………………………………………………………………… |
11 |
|
|
0703 |
Load information file not found …………………………………………………………… |
11 |
|
|
0704 |
File load error …………………………………………………………………………………… |
11 |
|
|
0705 |
Default scheduling table error …………………………………………………………….. |
12 |
|
|
0706 |
Backup data file error ………………………………………………………………………… |
12 |
|
|
0707 |
DTL link/unlink error …………………………………………………………………………. |
12 |
|
|
0708 |
RT thread stack overflow …………………………………………………………………… |
13 |
|
|
0709 |
Hardware exception ………………………………………………………………………….. |
13 |
|
|
0710 |
System call error ………………………………………………………………………………. |
13 |
|
|
0711 |
AlarmService library error ………………………………………………………………….. |
14 |
|
|
0712 |
AlarmService internal error (exception) ……………………………………………….. |
14 |
|
|
0713 |
AlarmService error ……………………………………………………………………………. |
14 |
|
|
0714 |
Blue screen ……………………………………………………………………………………… |
14 |
|
|
0715 |
P100-Menu error ………………………………………………………………………………. |
15 |
|
|
0716 |
Floating point exception …………………………………………………………………….. |
15 |
|
|
0717 |
PLC control error ……………………………………………………………………………… |
15 |
|
|
0718 |
Real time thread time over …………………………………………………………………. |
15 |
|
|
0719 |
HXCP thread error ……………………………………………………………………………. |
15 |
|
|
0720 |
AlarmService internal error ………………………………………………………………… |
16 |
|
|
0721 |
DeviceNet error ………………………………………………………………………………… |
16 |
|
|
0723 |
DeviceNet I/O data link file read …………………………………………………………. |
17 |
|
|
0725 |
M code data file ……………………………………………………………………………….. |
17 |
|
|
0726 |
Safety speed data error …………………………………………………………………….. |
17 |
|
|
0727 |
MCS firmware doesn’t support POS2 unit ……………………………………………. |
17 |
|
|
0728 |
FL-net error ……………………………………………………………………………………… |
18 |
|
|
0729 |
Non-responsive software detected. …………………………………………………….. |
18 |
|
|
0731 |
R Spec. error …………………………………………………………………………………… |
18 |
|
|
0732 |
Unable to execute lost motion compensation ……………………………………….. |
18 |
|
|
0735 |
MCS DD encoder link error ………………………………………………………………… |
18 |
|
|
0736 |
MCS DD encoder error ……………………………………………………………………… |
19 |
|
|
0737 |
MCS DD encoder (slave sensor) detected error ……………………………………. |
19 |
|
|
0738 |
MCS DD encoder initialization failure ………………………………………………….. |
20 |
|
|
0739 |
MCS DD encoder (slave sensor) initialization failure ……………………………… |
21 |
|
|
0741 |
MCS firmware version error ……………………………………………………………….. |
22 |
|
|
0742 |
Relocation detection error ………………………………………………………………….. |
22 |
|
|
0744 |
MCS power supply unit overload ………………………………………………………… |
22 |
5921-E P-6
|
SECTION 2 ALARM P |
||
|
0750 |
The spec.-code or select-soft. was wrong |
……………………………………………. 22 |
|
0752 |
VDU communication error …………………………………………………………………. |
23 |
|
0753 |
VDU detected error …………………………………………………………………………… |
23 |
|
0754 |
VDU initialization failure …………………………………………………………………….. |
24 |
|
0755 |
SIO link error ……………………………………………………………………………………. |
24 |
|
0756 |
PSC optical scale encoder error …………………………………………………………. |
25 |
|
0757 MF-SAFETY Error ……………………………………………………………………………. |
25 |
|
|
0758 |
Safety I/O Error ………………………………………………………………………………… |
26 |
|
0759 |
Safety Servo Link Error ……………………………………………………………………… |
28 |
|
0782 |
Magnetic encoder speed detection error ……………………………………………… |
29 |
|
0783 |
MCS Rotary encoder 5 initialization failure …………………………………………… |
29 |
|
0784 |
MCS Rotary encoder 5 error ………………………………………………………………. |
30 |
|
0785 |
MCS Rotary encoder 4 initialization failure …………………………………………… |
30 |
|
0786 |
MCS Rotary encoder 4 error ………………………………………………………………. |
30 |
|
0787 |
MCS Rotary encoder 3 initialization failure …………………………………………… |
30 |
|
0788 |
MCS Rotary encoder 3 error ………………………………………………………………. |
30 |
|
0789 |
MCS Rotary encoder 2 error ………………………………………………………………. |
31 |
|
0790 |
MCS Rotary encoder 1 initialization failure …………………………………………… |
31 |
|
0791 |
MCS Rotary encoder 1 error ………………………………………………………………. |
31 |
|
0792 |
MCS Linear scale 4 initialization failure ……………………………………………….. |
32 |
|
0793 |
MCS Linear scale 4 error …………………………………………………………………… |
32 |
|
0794 |
MCS Linear scale 3 initialization failure ……………………………………………….. |
32 |
|
0795 |
MCS Linear scale 3 error …………………………………………………………………… |
33 |
|
0796 |
MCS Linear scale 2 initialization failure ……………………………………………….. |
33 |
|
0797 |
MCS Linear scale 2 error …………………………………………………………………… |
33 |
|
0798 |
MCS Linear scale 1 initialization failure ……………………………………………….. |
33 |
|
0799 |
MCS Linear scale 1 error …………………………………………………………………… |
33 |
|
0800 |
Spindle D/A control data file read ……………………………………………………….. |
34 |
|
0801 |
TCP/IP board detected error ………………………………………………………………. |
34 |
|
0802 |
Load information file not found …………………………………………………………… |
35 |
|
0803 |
File load error …………………………………………………………………………………… |
35 |
|
0804 |
MSB file mismatch ……………………………………………………………………………. |
35 |
|
0805 |
MOP-Tool parameter PBU load ………………………………………………………….. |
35 |
|
0806 |
MOP-Tool tool data PBU load ……………………………………………………………. |
35 |
|
0807 |
ACP panel status receipt error ……………………………………………………………. |
36 |
|
0808 |
Speed change ratio failure …………………………………………………………………. |
36 |
|
0810 |
NC I/O data file read …………………………………………………………………………. |
36 |
|
0812 |
MCS initialization error ………………………………………………………………………. |
36 |
|
0813 |
MCS Communication error ………………………………………………………………… |
38 |
|
0814 |
MCS data file corrupt ………………………………………………………………………… |
39 |
5921-E P-7
|
SECTION 2 ALARM P |
||
|
0815 |
PLC real-time task loop error ……………………………………………………………… |
40 |
|
0816 |
PLC initialization error ……………………………………………………………………….. |
40 |
|
0817 |
MCS error ……………………………………………………………………………………….. |
41 |
|
0818 |
ADP initialization failure …………………………………………………………………….. |
41 |
|
0820 |
Machine data file read ………………………………………………………………………. |
41 |
|
0821 |
Spindle gear ratio ……………………………………………………………………………… |
42 |
|
0822 |
Wheel data file read ………………………………………………………………………….. |
42 |
|
0823 AXIS CONSTRUCTION DATA setting error …………………………………………. |
42 |
|
|
0824 |
Unit connection mistake …………………………………………………………………….. |
43 |
|
0825 AXIS CONSTRUCTION name not set …………………………………………………. |
43 |
|
|
0826 AXIS CONSTRUCTION DATA file read ………………………………………………. |
43 |
|
|
0827 |
Control axis not found ……………………………………………………………………….. |
43 |
|
0828 |
Wire feed axis No. error …………………………………………………………………….. |
43 |
|
0833 |
MCS option program file not sent ……………………………………………………….. |
44 |
|
0834 |
MCS servo data error ……………………………………………………………………….. |
44 |
|
0835 |
MCS communication error …………………………………………………………………. |
44 |
|
0836 |
Program request illegal ……………………………………………………………………… |
45 |
|
0837 |
Loader spec. code data error ……………………………………………………………… |
45 |
|
0838 |
Loader backup data file read error ………………………………………………………. |
45 |
|
0839 |
Specification conditions failure …………………………………………………………… |
45 |
|
0840 |
SuperHi-NC specification mismatch ……………………………………………………. |
46 |
|
0841 |
FCP4 board detected error ………………………………………………………………… |
46 |
|
0842 |
Safety monitor spec. error …………………………………………………………………. |
46 |
|
0845 |
Specification code setting failure ………………………………………………………… |
46 |
|
0846 |
Thermal deviation comp. backup data file read …………………………………….. |
47 |
|
0847 |
DNC-DT preload task start error …………………………………………………………. |
47 |
|
0848 |
PSCB error ……………………………………………………………………………………… |
47 |
|
0849 |
Synchronous axis tandem control initialization failure ……………………………. |
47 |
|
0850 |
MCS Undefined alarm number …………………………………………………………… |
48 |
|
0851 |
MCS Inverter unit fault ………………………………………………………………………. |
48 |
|
0852 |
Mistake in data from MCS to NC ………………………………………………………… |
49 |
|
0853 MCS CON APA deviation ………………………………………………………………….. |
50 |
|
|
0854 |
MCS Power supply unit error ……………………………………………………………… |
50 |
|
0855 |
MCS Converter link error …………………………………………………………………… |
51 |
|
0856 |
MCS DC-bus voltage alarm ……………………………………………………………….. |
51 |
|
0857 |
MCS Motor overcurrent …………………………………………………………………….. |
51 |
|
0858 |
MCS Power unit overheat ………………………………………………………………….. |
51 |
|
0859 |
MCS Power unit overload ………………………………………………………………….. |
52 |
|
0860 |
MCS Supply voltage flutter ………………………………………………………………… |
52 |
|
0861 |
MCS Inverter capacity differs from spec. ……………………………………………… |
52 |
5921-E P-8
|
SECTION 2 ALARM P |
||
|
0862 |
MCS Winding change failure ……………………………………………………………… |
52 |
|
0863 |
MCS Encoder link error …………………………………………………………………….. |
53 |
|
0864 |
MCS Encoder detected error ……………………………………………………………… |
53 |
|
0865 |
MCS Encoder initialization failure ……………………………………………………….. |
54 |
|
0866 |
MCS Encoder with shaft detected error ……………………………………………….. |
54 |
|
0867 |
MCS Encoder with shaft initialization failure …………………………………………. |
54 |
|
0868 MCS ABSO SCALE error ………………………………………………………………….. |
55 |
|
|
0869 |
MCS ABSO SCALE initialization failure ……………………………………………….. |
55 |
|
0870 |
MCS Magnetic encoder alarm ……………………………………………………………. |
55 |
|
0871 |
MCS Resolver alarm …………………………………………………………………………. |
55 |
|
0872 |
MCS Pulse generator count over ………………………………………………………… |
56 |
|
0873 |
MCS Motor overheat …………………………………………………………………………. |
56 |
|
0874 |
MCS Servo link error ………………………………………………………………………… |
56 |
|
0875 |
MCS Servo link disconnection ……………………………………………………………. |
57 |
|
0876 |
Mistake in data from NC to MCS ………………………………………………………… |
57 |
|
0877 |
MCS Servo data error ……………………………………………………………………….. |
57 |
|
0878 |
MCS Illegal command ……………………………………………………………………….. |
58 |
|
0879 MCS CON speed over ………………………………………………………………………. |
58 |
|
|
0880 MCS Speed command over ……………………………………………………………….. |
59 |
|
|
0881 MCS DIFF over ………………………………………………………………………………… |
59 |
|
|
0882 MCS APA speed over ……………………………………………………………………….. |
59 |
|
|
0883 |
MCS Full-closed APA error ………………………………………………………………… |
59 |
|
0884 MCS Over speed ……………………………………………………………………………… |
60 |
|
|
0885 |
MCS Speed deviation over ………………………………………………………………… |
60 |
|
0886 |
MCS Collision detected …………………………………………………………………….. |
60 |
|
0887 |
MCS Urgent-stop time over ……………………………………………………………….. |
61 |
|
0888 |
MCS Belt is broken …………………………………………………………………………… |
61 |
|
0889 |
MCS Axis change control error …………………………………………………………… |
61 |
|
0890 |
MCS Independent encoder initialization failure …………………………………….. |
61 |
|
0891 |
MCS Calculated current position lies outside range ………………………………. |
62 |
|
0892 |
MCS Motor overload …………………………………………………………………………. |
62 |
|
0893 |
MCS Safety speed monitor E-Link error ………………………………………………. |
62 |
|
0894 |
MCS ABSO SCALE sub-slider detected error ………………………………………. |
62 |
|
0895 |
MCS Tandem control communication error ………………………………………….. |
63 |
|
0896 |
MCS Full abso scale link error ……………………………………………………………. |
63 |
|
0897 |
MCS Full abso scale error …………………………………………………………………. |
64 |
|
0898 |
MCS Full abso scale initialization failure ……………………………………………… |
64 |
|
0899 |
MCS Axis stop signal error ………………………………………………………………… |
65 |
|
0940 |
Time sharing task control …………………………………………………………………… |
65 |
|
0941 |
Real-time task control ……………………………………………………………………….. |
65 |
5921-E P-9
|
SECTION 2 ALARM P |
||
|
0942 |
Real-time task loop error …………………………………………………………………… |
65 |
|
0943 |
Main processor name incorrect ………………………………………………………….. |
66 |
|
0944 |
Slave processor name incorrect …………………………………………………………. |
66 |
|
0945 |
Memory board/battery life ………………………………………………………………….. |
66 |
|
0951 |
SMP error ……………………………………………………………………………………….. |
66 |
|
0952 |
Not equipped with processor board …………………………………………………….. |
67 |
|
0954 |
Peripheral processor start ………………………………………………………………….. |
67 |
|
0955 |
Spec. code: data file …………………………………………………………………………. |
67 |
|
0956 |
Backup data file read ………………………………………………………………………… |
68 |
|
0957 |
Graphic backup data file read …………………………………………………………….. |
68 |
|
0958 |
Pitch compensation data file read ……………………………………………………….. |
68 |
|
0965 |
Configuration file format error …………………………………………………………….. |
69 |
|
0971 |
Cache data: Initialization error ……………………………………………………………. |
69 |
|
0988 |
Cache data: Operation error ………………………………………………………………. |
69 |
|
0989 |
CPU information table data incorrect …………………………………………………… |
69 |
|
0990 |
TASK generate error …………………………………………………………………………. |
70 |
|
0991 |
TASK information table data incorrect …………………………………………………. |
70 |
|
0992 |
PLC backup data file read …………………………………………………………………. |
70 |
|
0993 |
TCP/IP board illegal ………………………………………………………………………….. |
71 |
|
0994 |
TCP/IP configuration file ……………………………………………………………………. |
71 |
|
0995 |
Machine axis data file ……………………………………………………………………….. |
71 |
|
0996 |
PLC axis data file ……………………………………………………………………………… |
71 |
|
0997 |
PLC monitor backup data file read ……………………………………………………… |
72 |
|
0998 |
PLC sequence program load ……………………………………………………………… |
72 |
|
0999 |
Synchronous tap data file read …………………………………………………………… |
73 |

5921-E P-10
SECTION 2 ALARM P
0700 NC start-up error
An error occurred when NC started up.
[Object] None
[Character-string] None
[Code]
0x10000000: NC Configuration read error 0x10003000: Spec code read error 0x20000000: ServoLink board initializing error 0x3XXX00YY: NC data file read error
XXX:
0x002: HD backup status file 0x004: Parameter data file 0x008: Machine data file 0x010: PLC backup data file 0x020: PLC-HMI data file 0x040: Alarm History data file 0x080: PLC AXIS data pbu file
0x100: POT TOOL data pbu file (M/C only) 0x200: MOP TOOL Tool data file (M/C only) 0x400: MOP TOOL Parameter file (M/C only) 0x800: Thermal deviation compensation data file
YY:
0x01: File read open error 0x02: File read error 0x03: Version check error 0x04: Check sum error
0x05: Double check sum error 0x06: Backupped Memory error 0x07: File write open error 0x08: File write error
0x40000000: Axis information initializing error -More than 8 axis
0x50000000: PLC data file read error -Read failed M code data file
0x60000000: I/O Initializing error -PLC variable backup file read error -I/O forced data file read error
0x70000000: ServoLink Initializing error 0x80000000: Operation buffer get error 0x90000000: PBU data file read error 0xA0000000: Shared memory size definition error 0xA1XXXXXX: AlarmService start error
XXXXXX: Error code of AlarmService library function 0xA2400002: Alarm History read error 0xA3000000: Thread monitor initializing error
0xA9000000: Initialization processing of the safety logic was not completed within 20 seconds 0xA9000001: Axis construction definition file open error
0xA9000002: Axis construction definition file read error 0xA9000003: Axis construction definition file mismatch 0xFFFFFFFF: Debug information file read error
0701 P100-Menu initialization failure
An error occurred in P100-Menu while system startup.
[Object] None
[Character-string] None
[Code]
1:NC Control file was not found.
2:PLC Control file was not found.
3:NC-HMI was not found
5921-E P-11
SECTION 2 ALARM P
4:3D real sim file was not found.
5:MacMan file was not found.
6:Version mismatch between P100-Menu and PLC Control
7:Version mismatch between P100-Menu and MacMan
8:Version mismatch between P100-Menu and NC Control
11:Conf-P100-menu read error
12:An error occurred at RTOS
13:An error occurred at UPS Service
21:NC Control start failure
22:Error in obtaining shared objects
23:PLC Control start failure
24:NC-HMI start failure
25:3D real sim start failure
26:MacMan start failure
101:Startup sequence 0x10 receive failure
200:Startup sequence 0x10 send failure
201:Startup sequence 0x20 receive failure
300:Startup sequence 0x20 send failure
301:Startup sequence 0x30 receive failure
400:Startup sequence 0x30 send failure
401:Startup sequence 0x60 receive failure
500:Startup sequence 0x60 send failure
501:Startup sequence 0x70 receive failure
600:Startup sequence 0x70 send failure
601:Startup sequence 0x7C receive failure
700:Startup sequence 0x7C send failure
701:AlarmService start failure
702:Activation sequence 0x80 receive failure
[Probable Faulty Locations]
1.Execution file name failure 2.Data file name failure 3.RTOS failure
4.UPS function failure 5.Software failure 6.Software Version failure
0702 Power failure upon start-up
[Object] None
[Character-string] None
[Code] None
[Probable Faulty Locations]
1.Power failure during while system startup 2.Power shutoff during while system startup
0703 Load information file not found
A load information file was not found.
[Object] None
[Character-string] None
[Code] None
0704 File load error
An object file was not loaded correctly.
[Object] None
[Character-string]
5921-E P-12
SECTION 2 ALARM P
None
[Code]
1:A file was not found
2:The attribute of file was not correct.
3:The load address information of file was not correct 4:An error occurred when file was loaded
FFFFFFFF:The details of alarm was displayed by message from OS
0705 Default scheduling table error
A default scheduling table error was detected.
[Object] None
[Character-string] None
[Code]
0x00010001: RTIN default scheduling table error (element number) 0x00010002: RTIN default scheduling table error (end element) 0x00020001: TSMN default scheduling table error (element number) 0x00020002: TSMN default scheduling table error (initial attribute)
[Probable Faulty Locations] 1.NC software failure
0706 Backup data file error
Error occurred when load/save the backup file.
[Object] None
[Character-string] None
[Code] XXXXYYYY
XXXX
0x0002:HD backup status file 0x0004:Low speed NC backup data file 0x0008:High speed NC backup data file 0x0010:PLC backup data file 0x0020:PLC-HMI data file 0x0040:Alarm history data file 0x0080:PLC axis data file
0x0100:POT TOOL data file
0x0200:MOP TOOL Tool data file (M/C only) 0x0400:MOP TOOL Parameter data file (M/C only) 0x0800:Thermal deviation compensation data file
YYYY
1:File read open error 2:File read error 3:Version check error 4:Check sum error 5:Double check sum error
6:Backup memory check error 7:File write open error
8:File write error
0707 DTL link/unlink error
An error occurred in DTL link or unlink.
[Object] None
[Character-string] None
[Code]
1:RTIN refresh error
![]()
5921-E P-13
SECTION 2 ALARM P
2:TSMN refresh error
[Probable Faulty Locations]
1.Hardware failure 2.Software failure
0708 RT thread stack overflow
Stack overflow of RT thread was detected.
[Object] None
[Character-string]
Occurred RT thread name
[Code] None
[Probable Faulty Locations] 1.NC software failure
0709 Hardware exception
Hardware exception was occurred.
[Object] None
[Character-string]
Occurred RT thread name
[Code]
Hardware exception code 0x5555: CPU Diagnose error 0x8100:Divide by 0 error
0x8101:Unexpected Single Step Interrupt 0x8102:Unexpected NMI 0x8103:Unexpected Debug Interrupt 0x8104:Overflow error
0x8105:Array Bounds error 0x8106:Invalid Opcode error 0x8107:NPX Device not present 0x8108:Double Fault error 0x8109:Unknown Device error 0x810A:Invalid TSS error 0x810B:Segment not Present error 0x810C:Stack Fault error 0x810D:General Protection error 0x810E:Page Fault error 0x8110:Unknown Device error 1 0x8111:Alignment error
[Probable Faulty Locations] 1.Hardware failure 2.Software failure
[Note]
Alarm information is also displayed also in the console window.
0710 System call error
An error occurred in the INtime system call.
[Object] None
[Character-string]
Occurred RT thread name
[Code] XXXXYYYY
XXXX:INtime system call code
YYYY:Return value or status of INtime system call [Probable Faulty Locations]
5921-E P-14
SECTION 2 ALARM P
NC software failure
[Note]
Alarm information is also displayed also in the console window.
0711 AlarmService library error
An error occurred in the AlarmService library function.
[Object] None
[Character-string] Occurred thread name
[Code]
XXYYYYYY
XX:AlarmService library function code YYYYYY:AlarmService library function error code
[Probable Faulty Locations] NC software failure
[Note]
Alarm information is also displayed also in the console window.
0712 AlarmService internal error (exception)
An error occurred inside of AlarmService.
[Object] None
[Character-string] «ALMS»
[Code]
AlarmService internal error code
[Probable Faulty Locations] NC software failure
[Note]
Alarm information is also displayed also in the console window.
0713 AlarmService error
P100-Menu detected AlarmService error.
[Object] None
[Character-string] None
[Code] None
[Probable Faulty Locations] 1.NC software failure
0714 Blue screen
Blue screen (kernel stop error) occurred.
[Object] None
[Character-string] None
[Code] None
[Probable Faulty Locations] 1.Win32 application failure 2.Windows failure 3.Windows driver failure
5921-E P-15
SECTION 2 ALARM P
0715 P100-Menu error
An abnormal condition of P100-Menu was detected.
[Object] None
[Character-string] None
[Code] None
[Probable Faulty Locations] 1.P100-Menu failure
0716 Floating point exception
Floating point exception was occurred.
[Object] None
[Character-string]
Occurred RT thread name
[Code] XXXXYYZZ
XXXX:Exception code YY:Not used (0 fixed) ZZ:FPU status word
bit5:PE (Precision Exception Flag) bit4:UE (Underflow Exception Flag) bit3:OE (Overflow Exception Flag) bit2:ZE (Zero Divide Exception Flag)
bit1:DE (Denormalized Operand Exception Flag) bit0:IE (Invalid Operation Exception Flag)
[Probable Faulty Locations] NC software failure
0717 PLC control error
Error occurred on PLC Control.
[Object] None
[Character-string] None
[Code] XXXXYYYY
XXXX:PLC Control status YYYY:PLC Control error code
[Probable Faulty Locations] 1.PLC software failure
0718 Real time thread time over
Real time-type thread did not finish within the stated time
[Object] None
[Character-string]
RT thread name that was exceeded the stated time
[Code] None
[Probable Faulty Locations] 1.NC software failure
0719 HXCP thread error
5921-E P-16
SECTION 2 ALARM P
An abnormal condition of HXCP thread was detected.
[Object] None
[Character-string] None
[Code] None
[Probable Faulty Locations] 1.NC software failure
0720 AlarmService internal error
An error occurred inside of AlarmService.
[Object] None
[Character-string] «ALMS»
[Code]
AlarmService internal error code
[Probable Faulty Locations]
1.NC software failure 2.P100-Menu failure
0721 DeviceNet error
Error occurred on DeviceNet.
[Index] None
[Character-string] CH* SC$
* : Channel number where the error occurred. S : Sequence counter
[Code] XXYYZZZZ
XXSlave station MacID where the error occurred
YYSlave station
0x00 Normal or nonexistent slave station
0x46 Duplicate MacID error
0x48 Communication stop
0x49 Discrimination information was not compatible with scan list 0x4D Data size was not compatible with scan list
0x4E No response in the connection check.
0x4F Other slave stations are nonexistence on network 0x50 Idle condition
0x53 Error received in the connection check
0x54 Timeout occurred in the connection check
0x56 Turn into the idle mode 0x5B Bus off
0x5C Network power supply off
( XXXX became 0xFFFF,if its not caused by slave station, such as communication delay.) ZZZZ Scanner error status
bit 0 Memory check error bit 1 Scan list initialize error
bit 2 Scan list mismatch error(MacID) bit 3 Scan list mismatch error(Input data)
bit 4 Scan list mismatch error(Output data) bit 5 Duplicate MacID error
bit 6 Network power supply status error bit 7 Memory parity error
bit 8 Input data reception error(single) bit 9 Input data reception error(dowble)
bit10 Output data transmission error(single) bit11 Output data transmission error(dowble)
5921-E P-17
SECTION 2 ALARM P
bit12 Slave station communication delay error(single) bit13 Slave station communication delay error(dowble) bit14 Bus off
bit15 Diagnostic information access error
[Probable Faulty Locations]
1)Hardware failure 2)Software failure
0723 DeviceNet I/O data link file read
The NC failed to read DeviceNet IO data link file.
[Code]
I/O data file load status (in hexadecimal) 2 ->File open error (no file)
3 ->File read error (no data)
4 ->File attribute error (not «PBU1»)
5 ->File close error
6 ->File size error (too small)
7 ->File size error (too large)
100->Wrong PLC machine type
200->Wrong PLC class
300->Wrong file version
1002 ->DN SCAN LIST CHANGE FILE OPEN ERROR
1003 ->DN SCAN LIST CHANGE FILE READ ERROR (NO DATA)
1004 ->DN SCAN LIST CHANGE FILE ATTRIBUTE ERROR (NO ‘PBU1’) 1005 ->DN SCAN LIST CHANGE FILE CLOSE ERROR
1006 ->DN SCAN LIST CHANGE FILE SIZE ERROR (SIZE SMALL)
0725 M code data file
Establishment data of reading M-code file is bad.
[Code]
1->The denial data is bad.
[Character string]
The number is M-code which is established bad data.
[Measures to Take]
Please correct the bad data of M-code.
0726 Safety speed data error
The safety speed data was in abnormal state in the machine without the CE marking safety speed monitor.
[Index]
Axis name or none (spindle)
[Character-string] None
[Code]
X
X=1:The guard number of the safety speed data was outside the range from -0 to 9.
[Measures to Take]
Change the safety speed monitor data file for axis control. Relevant specifications:Without CE mark safety speed monitor type
[Related Specifications]
Without CE mark safety speed monitor type
0727 MCS firmware doesn’t support POS2 unit
This alarm occurs when the firmware ROM version of the NC axis/ machine(PLC) axis MIV unit is not 511 or later when the new POS unit is installed.
[Character-string] None
[Code] None
5921-E P-18
SECTION 2 ALARM P
0728 FL-net error
An error occurred during startup of the FL-net card.
[Object] None
[Character-string] None
[Code]
Y000XXX
Y:0
XXXX: 7F00:System error
7F01:Flash memory error 7F02:DRAM test error 7F03:NICE test error 7F04:EEPROM sum check error 7F05:CPU BUS error 7F06:illegal Instruction
Y:1
XXXX:
0004:Timeout error for 4 sec or longer Y:F
XXXX:
FFFF: FL-net card is not mounted
[Probable Faulty Locations] FL-net card is defective.
0729 Non-responsive software detected.
Non-answered software was detected.
[Object] None
[Character-string] None
[Code]
NT Process name
[Probable Faulty Locations] NC software failure
0731 R Spec. error
It is the illegal of «R SPEC».
[Index] None
[Code]
1:»NON R SPEC» of NC is OFF, and «R-SPEC» of SVDN-ID is OFF. 2:»NON R SPEC» of NC is ON, and «R-SPEC» of SVDN-ID is ON.
3:When there are 2 SVDN-boards in the machine, «R-SPEC» of one board is ON, other is OFF. 4X:»NON R SPEC» of NC is OFF, and «R-SPEC» of SVDN-ID is ON, and Restriction-Spec is ON.
0732 Unable to execute lost motion compensation
0735 MCS DD encoder link error
An error occurred in the encoder communication link.
[Object]
Axis name or none (spindle)
[Character-string] None
[Code] XXYYZZZZ
5921-E P-19
SECTION 2 ALARM P
XX= $FF (fixed)
YY= $00: Error is detected at the DD encoder.
$01: Error is detected at the DD encoder(slave sensor). ZZZZ = Encoder link error status at the time of error detection
bit15: Undefined bit14: Undefined
bit13: Error in communication with the DD encoder (slave sensor) bit12: Error in communication with the DD encoder
bit11: MT buffer error
bit10: Transmission loop error in AT mode
bit9 : Data over error in data receiving part of interface bit8 : Undefined
bit7 : Undefined
bit6 : Modulation code error bit5 : CRC error
bit4 : Format error
bit3 : Double transmission error bit2 : Double reception error bit1 : Parity error
bit0 : Time-out error
This alarm occurs only at ICB-H.
[Probable Faulty Locations]
DD encoder of DD encoder (slave sensor) of the pertinent axis Encoder link cables or connectors Inverter unit control board
0736 MCS DD encoder error
The DD encoder has become undetectable.
[Object]
Axis name or none (spindle)
[Character-string] None
[Code] XXYYZZZZ
XX= Positional data status bit7 : Error bit (1:error)
bit6 : Absolute position sensor margin error.(0:Normal, 1:Warning) bit5 : Gap-Warning (1:Gap-small,Toggle:Gap-big)
bit4 : Inclination-Warning (1:CCW-big, Toggle:CW-big) bit3 : Auto set mode (0:Normal, 1:Auto mode)
bit2 : Communication error (Toggle by detecting)
bit1,0: Error bit number of absolute position code.(It is indicated by 2bits.)
YY= Alarm code
01: Stop command has stopped. 02: Control parameter error
04: Absolutization error
05: Initialization speed too high 08: Auto-set-data error
0D: Speed too high
0E: Synchronization error
20:Absolutization mismatch (Only Format-5)
21:Communication-error of Master-sensor (Only Format-5) 3E: Code-error by Absolute-position-sensor
3F: Check-errotr by Absolute-position-code
40:Inclination-error (for plus)
41:Inclination-error (for minus)
42:Gap is narrow
43:Gap is wide
ZZZZ= 0000 fixed
This alarm occurs only at ICB-H.
[Probable Faulty Locations] DD encoder
0737 MCS DD encoder (slave sensor) detected error
The DD encoder (slave sensor) has become undetectable.

5921-E P-20
SECTION 2 ALARM P
[Object]
Axis name or none (spindle)
[Character-string] None
[Code] XXYYZZZZ
XX= Positional data status bit7 : Error bit (1:error)
bit6 : Absolute position sensor margin error.(0:Normal, 1:Warning) bit5 : Gap-Warning (1:Gap-small,Toggle:Gap-big)
bit4 : Inclination-Warning (1:CCW-big, Toggle:CW-big) bit3 : Auto set mode (0:Normal, 1:Auto mode)
bit2 : Communication error (Toggle by detecting)
bit1,0: Error bit number of absolute position code.(It is indicated by 2bits.)
YY= Alarm code
01: Stop command has stopped. 02: Control parameter error
04: Absolutization error
05: Initialization speed too high 08: Auto-set-data error
0D: Speed too high
0E: Synchronization error
20:Absolutization mismatch (Only Format-5)
21:Communication-error of Master-sensor (Only Format-5) 3E: Code-error by Absolute-position-sensor
3F: Check-errotr by Absolute-position-code
40:Inclination-error (for plus)
41:Inclination-error (for minus)
42:Gap is narrow
43:Gap is wide
ZZZZ= 0000 fixed
This alarm occurs only at ICB-H.
[Probable Faulty Locations] DD encoder (slave sensor)
0738 MCS DD encoder initialization failure
An error occurred in the initialization of the DD encoder.
[Object]
Axis name or none (spindle)
[Character-string] None
[Code] XXYYZZZZ
XX= Encoder link initialization sequence number (1B) at the time of the error detection
0:Reset
1:Network address setting
2:Request to send the basic information for communication
3:Change of communication software version
4:Acquisition of device information
5:Parameter change
6:Position detection start
7:AT mode start
YY= Error content (1B)
0:Communication error
1:Transmission start time over
2:Transmission finish time over
3:Reception finish time over
4:Abnormal response address
5:Abnormal response code
6:Parameter error
ZZZZ = Data (2B)
If YY = 0,
The encoder link error status C2ERR at the time of error detection appears.
If YY = 1, 2 or 3,

5921-E P-21
SECTION 2 ALARM P
The transmitted frame information QC2MTINF appears.
If YY = 4,
The network address of the responding device appears.
If YY = 5,
Alarm code + positional data status
Refer to MCS DD Encoder error (alarm 1136).
If YY = 6,
Parameter number at which the error is detected
1:Reception of insufficient number of parameters
2:Basic information for communication being incompatible
3:Multi-turn detection range over
4:Communication protocol version being incompatible
5:Positional data format being incompatible
6:Abbreviated data mode being incompatible
However, when abnormal voltage is detected at the encoder fuse XXYY = $FFFF fixed
ZZZZ = Detected voltage value of the encoder fuse (12[V] = $9980) Normal range: 10.6[V] to 13.8[V]
Allowable range: $8800 to $B000 This alarm occurs only at ICB-H.
[Probable Faulty Locations] DD encoder
Encoder link cables and connectors Inverter unit control board
0739 MCS DD encoder (slave sensor) initialization failure
An error occurred in the initialization of the DD encoder (slave sensor).
[Index]
Axis name or none (spindle)
[Character-string] None
[Code] XXYYZZZZ
XX= Encoder link initialization sequence number (1B) at the time of the error detection
0:Reset
1:Network address setting
2:Request to send the basic information for communication
3:Change of communication software version
4:Acquisition of device information
5:Parameter change
6:Position detection start
7:AT mode start
YY= Error content (1B)
0:Communication error
1:Transmission start time over
2:Transmission finish time over
3:Reception finish time over
4:Abnormal response address
5:Abnormal response code
6:Parameter error
ZZZZ = Data (2B)
If YY = 0,
The encoder link error status C2ERR at the time of error detection appears.
If YY = 1, 2 or 3,
The transmitted frame information QC2MTINF appears.
If YY = 4,
The network address of the responding device appears.
If YY = 5,
Alarm code + positional data status
Refer to MCS DD Encoder error (alarm 1136).
If YY = 6,
Parameter number at which the error is detected
1:Reception of insufficient number of parameters
2:Basic information for communication being incompatible
3:Multi-turn detection range over
5921-E P-22
SECTION 2 ALARM P
4:Communication protocol version being incompatible
5:Positional data format being incompatible
6:Abbreviated data mode being incompatible
However, when abnormal voltage is detected at the encoder fuse XXYY = $FFFF fixed
ZZZZ = Detected voltage value of the encoder fuse (12[V] = $9980) Normal range: 10.6[V] to 13.8[V]
Allowable range: $8800 to $B000 This alarm occurs only at ICB-H.
[Probable Faulty Locations] DD encoder (slave sensor)
Encoder link cables and connectors Inverter unit control board
0741 MCS firmware version error
The MCS software version was not correct.
[Object] None
[Code]
1-> The MCS software version of the XA axis is not since ICBH590 in the premium thread cutting function spec.
[Probable Faulty Locations] Specification code error MCS software version error
[Measures to Take]
Reinstall the software or reissue the install disk. MCS software Upgrade
0742 Relocation detection error
Relocation detection error occurred [Character-string]
|
ComErr |
:Communication error |
|
PBU |
:PBU data error |
|
PJ |
:PJ discord |
|
PwdTout |
:Password application timeout |
|
PwdChk |
:Password check error |
PwdTerm:Password application terminate
[Code]
ComErr:
bit2 Atmega error bit1 RTC error
bit0 Relocation detection module error PwdChk:
Password check error code
0744 MCS power supply unit overload
Power Supply Unit over load
[Object]
Axis name or none (spindle)
[Character-string] None
[Code]
1(fixed)
[Probable Faulty Locations] Power unit
Overload operation
0750 The spec.-code or select-soft. was wrong
The combination of NC-software and PLC-software was wrong. Or, the combination of specification-code was wrong.
![]()
5921-E P-23
SECTION 2 ALARM P
[Object] None
[Character-string] None
[Code]
1:PLC-software is not effective for the specification of «TOOL OFFSET 999» 4:It can’t be combined with spindle command unit 0.1.
5:Overlapped PLC axis number
[Probable Faulty Locations]
(1)Mistake of select for specification-code (2)Mistake of select for PLC-software-version
0752 VDU communication error
An error occurred in the VDU(Vibration Detect Unit) communication link, disabling the VDU from detecting acceleration.
[Object]
Axis name or none (spindle)
[Character-string] None
[Code] XXYYZZZZ
XX= FF [HEX] (fixed)
YY= 00 [HEX] (fixed)
ZZZZ = VDU link error status at the time of error detection. (Each bit represents the kind of communication error.)
bit 15 Undefined bit 14 Undefined bit 13 Undefined
bit 12 1: Error in communication with VDU(AT mode) bit 11 1: Error in communication with VDU(MT mode) bit 10 1: Transmission loop error in AT (auto) mode
bit 9 1: Data over error in data receiving part of interface bit 8 Undefined
bit 7 Undefined
bit 6 1: Modulation code error bit 5 1: CRC error
bit 4 1: Format error
bit 3 1: Double transmission error bit 2 1: Double reception error bit 1 1: Modulation code error
bit 0 1: Time-out error [Probable Faulty Locations]
—VDU
—Encoder link cables
—VFA unit
0753 VDU detected error
The VDU(Vibration Detect Unit) has become unable to detect acceleration data.
[Object]
Axis name or none (spindle)
[Character-string] None
[Code]
XXYYZZZZ
XX = VDU error status
|
bit7 |
1: Error bit (1 is error) |
|
bit6 |
1: Empty bit |
|
bit5 |
1: Latest acceleration data is overflow(Y axis) |
|
bit4 |
1: Latest acceleration data is overflow(X axis) |
|
bit3 |
1: Empty bit |
|
bit2 |
1: Error in communication (toggled detecting each error) |
|
bit1 |
1: Previous acceleration data is overflow(Y axis) |

5921-E P-24
SECTION 2 ALARM P
|
bit0 |
1: Previous acceleration data is overflow(X axis) |
YY= VDU alarm code
01:Stop command halt
02: Control parameter error
07: User parameter check sum error 0E: Synchronous miss error
15:Acceleration sensor signal error (X axis)
16:Acceleration sensor signal error (Y axis)
17:Acceleration sensor signal error (X and Y axis) ZZZZ= 0 (fixed)
[Probable Faulty Locations]
— VDU
0754 VDU initialization failure
An error occurred in initialization of VDU(Vibration Detect Unit).
[Object]
Axis name or none (spindle)
[Character-string] None
[Code] XXYYZZZZ
XX= Encoder link sequence number at the time of error detection
0:Reset
1:Network address setting
2:Request of basic information on communication
3:Change of communication version
4:Acquisition of device information
5:Parameter change
6:AT (auto) mode start
YY= Error content
0:Communication error
1:Transmission start time over
2:Transmission finishes time over
3:Reception finishes time over
4:Abnormal response address
5:Abnormal response code
6:Parameter error
ZZZZ = Additional data If YY=0,
the encoder link error status C2ERR at the time of error detection appears. If YY=1, 2, or 3,
the transferred frame information C2MTINF appears. If YY=4,
the network address of the responding device appears. If YY=5,
the received frame information C2RXINF appears. If YY=6,
the number of parameter that caused the alarm appears. 1 = Not all the necessary parameters are received.
2 = Basic information on communication is incompatible.
4 = Protocol version on communication is incompatible. [Probable Faulty Locations]
—VDU
—Encoder link cables
—VFA unit
0755 SIO link error
An error occurred in the SIO link.
[Object] None
[Character-string] None

5921-E P-25
SECTION 2 ALARM P
[Code]
During steady processing FFFFFFFF:
Recieved the same data from MFU twice XXXXYYYY:
XXXX: command & data length 0303: recieved error with frame 0
YYYY:The second byte of reception data 1303: recieved error with frame 1
YYYY:The second byte of reception data 05FF: Error status besides 0
YYYY:Error status During setup processing XXYYZZZZ:
XX:frame
YY:command 00: reset
01: intelligence
02: time-out time setting 05: file-transfer
ZZZZ:error cause
0007: Data reception response is not sent within 0.15 second after data transmission. 0008: Data transmission does not end within 0.15 second.
0009: Communication error occurred after reception of data.
000A: Communication error occurred while the NC was waiting for data reception. 000B: Communication error occurred while the NC was waiting for data transmission. 000C: Data transmission was attempted during data transmission.
000D: Data transmission was attempted in the state of communication error. 000E: An error command was received.
000F: Transmission command and reception command were not same.
[Probable Faulty Locations]
1.SSIO card 2.Safety module 3.I/O slave
0756 PSC optical scale encoder error
An error was detected by the position encoder of optical scale.
[Character-string] None
[Code] XXYYZZ
XX:Value of the J-type endoder and value of the optical scale are too different. bit1:It is too different by a negative sign.
bit0:It is too different by a positive sign. YY:Pulse count value of optical scale
bit0:A-phase pulse and B-phase pulse have changed at the same time. ZZ:The amplitude of the optical scale signal is wrong.
bit1:The amplitude of B-phase is wrong. bit0:The amplitude of A-phase is wrong.
[Probable Faulty Locations]
—Breakdown of optical scale
—Breakdown of optical scale cable
[Measures to Take]
—Exchange of optical scale
—Exchange of optical scale cables
0757 MF-SAFETY Error
An error was detected by the MF-SAFETY.
[Object] None
[Character-string] None

5921-E P-26
SECTION 2 ALARM P
[Code]
0x1000XXXX->CPU Exception was occurred in the MF-SAFETY XXXX->Exception number
0x1100XXXX->NMI was occurred in the MF-SAFETY XXXX->NMI code
bit15->An error was occurred bit9 ->Voltage drop for CPU1
bit8 ->Watchdog timer overflow in CPU0 bit1 ->Voltage drop for CPU0
bit0 ->Watchdog timer overflow in CPU1 0x1200XXXX->CPU bus error was occurred in the MF-SAFETY
XXXX->CPUID
bit15->CPUID (0:CPU0, 1:CPU1) 0x130000XX->No response in CPU1 request
XX->CPU1 request number
0x170000XX->Normal process in the MF-SAFETY did not end within a specific period. XX->End time of normal process (1bit=62.5us)
0x1800XXXX->An Error was detected by the MF-SAFETY XXXX->Error Code
bit15->MFU I/O unit error bit14->MFU I/O Bus parity error bit12->Synchronization error
bit11->Wrongly set synchronous signal timing 0x19000000->Stack overflow in the MF-SAFETY CPU 0x1A00XXXX->Illegal address is in the label table
XXXX->Index of label table
0x1B000000->NC starts up with software update mode in the MF-SAFETY 0x1C0000XX->Mode setting is mismatch between NC and MF-SAFETY
XX->Mismatch location 01->MF-SAFETY mode setting is wrong 02->NC mode setting is wrong
[Probable Faulty Locations] MF-SAFETY MF-SAFETY mode setting NC mode setting
I/O unit in MFU
[Measures to Take]
Replace the MF-SAFETY unit Replace the I/O unit in MFU
Switch(SW1) of the MF-SAFETY turns off Update the MF-SAFETY software (safety logic)
0758 Safety I/O Error
An error occurred in Safety IO link (SIO link) or in safety I/O unit.
[Object] None
[Character-string] None
[Code]
0x20000000->Safety transmission data was mismatch between CPU0 and CPU1while initialization of SIO link 0x21XX0000->Command was not received while initialization of SIO link
XX->Expecting command 00->Reset Command
01->Information gathering Command
02->Time-out time setting Command
0x22XXYYYY->Communication error was occurred while initialization of SIO link XX->Expecting command
00->Reset Command
01->Information gathering Command
02->Time-out time setting Command YYYY->SIO controller error status
bit15->An error was occurred bit10->Reception buffer size setting was too big bit9 ->Disconnection error

5921-E P-27
SECTION 2 ALARM P
bit8 ->Modulation code error bit7 ->CRC error
bit6 ->Format error
bit5 ->Double transmission error bit4 ->Double reception error
bit3 ->Parity error was occurred when SIO controller read transmission buffer bit2 ->Parity error was occurred when CPU read transmission buffer
bit1 ->Parity error was occurred when CPU read reception buffer bit0 ->Time-out error
0x23XXYYYY->Error command was received while initialization of SIO link XX->SIO link slave address which error was detected
YYYY->Error status
bit15->An error was occurred bit10->Reception buffer size setting was too big bit9 ->Disconnection error
bit8 ->Modulation code error bit7 ->CRC error
bit6 ->Format error
bit4 ->Double reception error
bit3 ->Parity error was occurred when SIO controller read transmission buffer bit2 ->Parity error was occurred when CPU read transmission buffer
bit1 ->Parity error was occurred when CPU read reception buffer bit0 ->Time-out error
0x24XX00YY->Illegal command was received while initialization of SIO link XX->Expecting command
XX->Reception command
0x25XX0000->Safety IO slave information did not match the scan file list XX->Mismatch frame offset
0x2F000000->SIO link was disconnected
0x31000000->The command was not received within a specific period 0x3200XXXX->Communication error was detected by the MF-SAFETY
XXXX->SIO controller error status bit15->An error was occurred
bit10->Reception buffer size setting was too big bit9 ->Disconnection error
bit8 ->Modulation code error bit7 ->CRC error
bit6 ->Format error
bit5 ->Double transmission error bit4 ->Double reception error
bit3 ->Parity error was occurred when SIO controller read transmission buffer bit2 ->Parity error was occurred when CPU read transmission buffer
bit1 ->Parity error was occurred when CPU read reception buffer bit0 ->Time-out error
0x33XXYYYY->Error command was received in SIO link safety frame XX->SIO link slave address which error was detected YYYY->Error status
bit15->An error was occurred bit10->Reception buffer size setting was too big bit9 ->Disconnection error
bit8 ->Modulation code error bit7 ->CRC error
bit6 ->Format error
bit4 ->Double reception error
bit3 ->Parity error was occurred when SIO controller read transmission buffer bit2 ->Parity error was occurred when CPU read transmission buffer
bit1 ->Parity error was occurred when CPU read reception buffer bit0 ->Time-out error
0x34XX0000->Safety protocol could not be established on the SIO link XX->slave address
0x35XXYYZZ->Could not communicate safety SIO frame, after established safety protocol XX->slave address
YY->
00->Reset command was received
01->Unexpected command was received
02->Undefined command was received
03->Connection ID was in err
04->CRC error

5921-E P-28
SECTION 2 ALARM P
08->FailSafeData command was received ZZ->Reception safety data
0x36000000->Safety transmission data was mismatch between CPU0 and CPU1 0x37XX0000->Safety frame was not renewal
XX->slave address
0x3FXXYYZZ->Safety physical output data was mismatch between CPU0 and CPU1 XX->Index of physical output
YY->Output data in CPU0 ZZ->Output data in CPU1
0x41X000YY->An error was occurred in MFU I/O unit X->Slot number
YY->I/O unit error status <MF-EC1>
bit7->Overcurrent Protection circuit was worked in output circuit bit6->Overcurrent protection was occurred in input circuit bit4->I/O bus check error
bit2->Data was mismatched between order and monitor bit1->A parity error was occurred when I/O bus1 was written bit0->A parity error was occurred when I/O bus0 was written <MF-P2A16S>
bit6->Overcurrent protection was occurred in input circuit bit5->Self-check error
bit4->I/O bus check error <MF-P2M2S>
bit7->Overcurrent Protection circuit was worked in output circuit bit6->Overcurrent protection was occurred in input circuit bit4->I/O bus check error
bit2->Data was mismatched between order and monitor bit1->A parity error was occurred when I/O bus1 was written bit0->A parity error was occurred when I/O bus0 was written
0x42XYZZWW->MFU I/O unit input of CPU0 and CPU1 was mismatched longer than a specific period X->Slot number
Y->I/O unit safety input number (1-4) ZZ->Input data in CPU0
WW->Input data in CPU1
0x43XYZZWW->MFU I/O unit written data was mismatch between CPU0 and CPU1 X->Slot number
Y->I/O unit safety output number (1-4) ZZ->Output data in CPU0 WW->Output data in CPU1
[Probable Faulty Locations]
SIO link cables I/O unit in MFU MF-SAFETY I/O data file SIO slave unit
[Measures to Take]
Replace the SIO link cables Replace the MFU I/O unit Replace the MF-SAFETY unit Update the I/O data file Replace the SIO link slave unit
0759 Safety Servo Link Error
An error occurred in Safety Servo Link.
[Object] None
[Character-string] None
[Code]
0x50000000->Safety transmission data was mismatch between CPU0 and CPU1 in initialization of Servo link 0x51XX0000->Frame from slave was not received in initialization of Servo link
XX->axis ID
0x520XYYYY->Communication error was occurred in initialization of Servo link X->Servo link channel number

5921-E P-29
SECTION 2 ALARM P
YYYY->Servo controller error status bit15->An error was occurred bit11->Protect error
bit9 ->Disconnection error bit8 ->Modulation code error bit7 ->CRC error
bit6 ->Format error
bit4 ->Double reception error
bit3 ->Parity error was occurred when Servo controller read transmission buffer bit2 ->Parity error was occurred when CPU read transmission buffer
bit1 ->Parity error was occurred when CPU read reception buffer bit0 ->Time-out error
0x53XX0000->The response was not received within a specific period XX-axis ID
0x54XX0000->Safety protocol could not be established on the Servo link XX->axis ID
0x55XXYYZZ->Could not communicate safety Servo frame, after established safety protocol XX->slave address
YY->
00->Reset command was received
01->Unexpected command was received
02->Undefined command was received
03->Connection ID was in err
04->CRC error
08->FailSafeData command was received ZZ->Reception safety data
0x56000000->Safety Servo transmission data was mismatch between CPU0 and CPU1 0xFFFFXXXX
XXXX->world clock after the put a safety protocol
[Probable Faulty Locations] Servo link cables MF-SAFETY
Servo link slave unit
Axis construction definition file
[Measures to Take]
Replace the Servo link cables Replace the MF-SAFETY unit Replace the Servo link slave unit
Update the axis construction definition file
0782 Magnetic encoder speed detection error
The difference between speed feed back value and current frequency of Magnetic encoder was always observed, and there was a difference in excessive.
[Object] Axis
[Character-string] None
[Code] XXXXYYYY
XXXX=speed reference value(2B) YYYY=speed detect value(2B)
[Probable Faulty Locations] Magnetic encoder
[Corrective Action]
Change Magnetic encoder
0783 MCS Rotary encoder 5 initialization failure
It failed in initialization of Rotary encoder 5(Others).
[Object] Axis
[Character-string] None

5921-E P-30
SECTION 2 ALARM P
[Probable Faulty Locations]
Rotary encoder 5(Others).
[Corrective Action]
Change Rotary encoder 5(Others).
0784 MCS Rotary encoder 5 error
Illegal data was detected in Rotary encoder 5(Others).
[Object] Axis
[Character-string] None
[Probable Faulty Locations] Rotary encoder 5(Others).
[Corrective Action]
Change Rotary encoder 5(Others).
0785 MCS Rotary encoder 4 initialization failure
It failed in initialization of Rotary encoder 4(HEIDENHAIN).
[Object] Axis
[Character-string] None
[Probable Faulty Locations]
Rotary encoder 4(HEIDENHAIN).
[Corrective Action]
Change Rotary encoder 4(HEIDENHAIN).
0786 MCS Rotary encoder 4 error
Illegal data was detected in Rotary encoder 4(HEIDENHAIN).
[Object] Axis
[Character-string] None
[Probable Faulty Locations]
Rotary encoder 4(HEIDENHAIN).
[Corrective Action]
Change Rotary encoder 4(HEIDENHAIN).
0787 MCS Rotary encoder 3 initialization failure
It failed in initialization of Rotary encoder 3(HEIDENHAIN).
[Object] Axis
[Character-string] None
[Probable Faulty Locations]
Rotary encoder 3(HEIDENHAIN).
[Corrective Action]
Change Rotary encoder 3(HEIDENHAIN).
0788 MCS Rotary encoder 3 error
Illegal data was detected in Rotary encoder 3(HEIDENHAIN).
[Object] Axis
[Character-string]

5921-E P-31
SECTION 2 ALARM P
None
[Probable Faulty Locations]
Rotary encoder 3(HEIDENHAIN).
[Corrective Action]
Change Rotary encoder 3(HEIDENHAIN).
0789 MCS Rotary encoder 2 error
Illegal data was detected in Rotary encoder 2(INA-BEARING).
[Object] Axis
[Character-string] None
[Code]
XXXXYYYY
XXXX= Content of illegal data
000A[HEX] : illegal data of A aspect voltage 000B[HEX] : illegal data of B aspect voltage
YYYY= Illegal data
XXXX=000A[HEX] : A aspect voltage value XXXX=000B[HEX] : B aspect voltage value
[Probable Faulty Locations]
Rotary encoder 2(INA-BEARING).
[Corrective Action]
Change Rotary encoder 2(INA-BEARING).
0790 MCS Rotary encoder 1 initialization failure
It failed in initialization of Rotary encoder 1.
[Object] Axis
[Character-string] None
[Code]
XXYYZZZZ
Same with the alarm No. 0865 «MCS Encoder initialize failed»
[Probable Faulty Locations] Rotary encoder 1 Motor encoder
Encoder link cable & connector Control base of Inverter Unit
[Corrective Action]
Exchange & check on thing Above Unit
0791 MCS Rotary encoder 1 error
Illegal data was detected in Rotary encoder 1.
[Object] Axis
[Character-string] None
[Code] XXYYZZZZ
XX= Rotary encoder status bit7 alarm
bit6 communication error
8X The output amplitude is normal.
9X Output amplitude smallness AX Output amplitude bigness BX Output amplitude too small YY= Rotary encoder alarm code

5921-E P-32
SECTION 2 ALARM P
00 Unstart
01 Stop command stop
02 The control parameter is illegal.
0E Synchronous mistake
0F The excitation output is illegal.
11B face Ad offset Voltage decrease
12A face AD offset voltage decrease
13A and B face AD offset voltage decrease
15B face AD offset voltage decrease
16A face Ad offset voltage rise
17A and B face AD offset voltage rise
25B face signal amplitude is excessive
26A face signal amplitude is excessive
27A and B face signal amplitude is excessive.
29The signal amplitude is underestimates. 2D B face signal amplitude is underestimates. 2E A and signal amplitude is underestimates.
2F A and B face signal amplitude is underestimates.
80-FF CPU illegal
ZZZZ= Rotary encoder position data Positional data of each pitch
[Probable Faulty Locations] Rotary encoder 1
[Corrective Action]
Change Rotary encoder 1
0792 MCS Linear scale 4 initialization failure
It failed in initialization of Linear scale 4(Others).
[Object] Axis
[Character-string] None
[Probable Faulty Locations] Linear scale 4(Others).
[Corrective Action]
Change Linear scale 4(Others).
0793 MCS Linear scale 4 error
Illegal data was detected in Liner scale 4(Others).
[Object] Axis
[Character-string] None
[Probable Faulty Locations] Linear scale 4(Others).
[Corrective Action]
Change Linear scale 4(Others).
0794 MCS Linear scale 3 initialization failure
It failed in initialization of Linear scale 3(HEIDENHAIN).
[Object] Axis
[Character-string] None
[Probable Faulty Locations] Linear scale 3(HEIDENHAIN).
[Corrective Action]
Change Linear scale 3(HEIDENHAIN).
![]()
5921-E P-33
SECTION 2 ALARM P
0795 MCS Linear scale 3 error
Illegal data was detected in Liner scale 3(HEIDENHAIN).
[Object] Axis
[Character-string] None
[Probable Faulty Locations] Linear scale 3(HEIDENHAIN).
[Corrective Action]
Change Linear scale 3(HEIDENHAIN).
0796 MCS Linear scale 2 initialization failure
It failed in initialization of Linear scale 2(HEIDENHAIN).
[Object] Axis
[Character-string] None
[Probable Faulty Locations] Linear scale 2(HEIDENHAIN).
[Corrective Action]
Change Linear scale 2(HEIDENHAIN).
0797 MCS Linear scale 2 error
Illegal data was detected in Liner scale 2(HEIDENHAIN).
[Object] Axis
[Character-string] None
[Probable Faulty Locations] Linear scale 2(HEIDENHAIN).
[Corrective Action]
Change Linear scale 2(HEIDENHAIN).
0798 MCS Linear scale 1 initialization failure
It failed in initialization of Linear scale 1(MITUTOYO).
[Object] Axis
[Character-string] None
[Code] XXYYZZZZ
Same with the alarm No. 0865 «MCS Encoder initialize failed»
[Probable Faulty Locations]
Rotary encoder 1 Motor encoder
Encoder link cable & connector Control base of Inverter Unit
[Corrective Action]
Exchange & check on thing Above Unit
0799 MCS Linear scale 1 error
Illegal data was detected in Liner scale 1(MITUTOYO).
[Object] Axis
[Character-string]

5921-E P-34
SECTION 2 ALARM P
None
[Code]
XXYYZZZZ
XX= Liner scale 1 status bit7: alarm
bit6: communication error
bit2: communication error(every detection)
bit0: alarm code distinction bit (bit0=1: An alarm occurred in MITUTOYO scale.) YY=Liner scale 1
case of XX=88 bit7: over speed
bit6: communication error bit5: EEPROM error bit4: CPU error
bit3: electric capacity error bit2: photo electron error bit1: digit match error bit0: initialize error
case of XX=80
43:MITUTOYO scale no response
44:MITUTOYO scale ID error case of XX=C0
00-3F: Gateway receive error
46:REQ time over error
ZZZZ= Liner scale 1 position data position data of every 2mm pitch
[Probable Faulty Locations] Linear scale 1
[Corrective Action] Change Linear scale 1
0800 Spindle D/A control data file read
The NC failed to read the spindle D/A control data file.
[Code] XY
X: Gear set number (The number where the error occurred first.X does not appear if Y = 1 to 6.) Y=1 -> No data file
Y=2 -> Data file type is not PBU1. Y=3 -> Larger data file size
Y=4 -> Improper data file size
Y=5 -> Gear set number does not match the data file size. Y=6 -> Gear set number is not any of 1 to 4.
Y=7 -> Motor speed limit or spindle speed limit is 0. Y=8 -> Max spindle speed is 0.
[Probable Faulty Locations]
Spindle D/A control data file creation error
[Measures to Take]
Create a correct spindle D/A control data file.
0801 TCP/IP board detected error
During activation of DNC-T1, T2, T3,or DT function, a CPU error occurred on TCP/IP board
[Index] None
[Character-string] None
[Code] XXYYZZ
XX…Board status in hexadecimal
bit7 bit6 bit5 bit4 bit3 bit2 bit1 bit0
RUN HALT CPUOFF 0 SNMI 0 0 0 YY…Bus error status in hexadecimal
bit7 bit6 bit5 bit4 bit3 bit2 bit1 bit0

5921-E P-35
SECTION 2 ALARM P
0 0 0 0 PROT DAI LOOP ECC ZZ…Always 0
[Probable Faulty Locations] 1.Hardware error on TCP/IP board
2.Software error on TCP/IP firmware
0802 Load information file not found
The custom software production system failed to find the load information file that matches the specification codes. Or, the file described in the load information file is not found.
[Character-string] Problem file name
[Probable Faulty Locations]
Installation error Software production error Specification code error
[Measures to Take]
Reinstall the software or reissue the install floppy disk.
0803 File load error
The custom software production system failed to find the software that matches the specification codes.
[Character-string]
Problem software file name
[Code]
1->The file ended without loading any character.
3->The file ended during file loading.
9->Wrong device name
10->Wrong file name
11->No file exists.
11 or FFFFFFFF
[Probable Faulty Locations] Installation error Software production error Specification code error
[Measures to Take]
Reinstall the software or reissue the install floppy disk.
0804 MSB file mismatch
The MSB file used for IMAPB and interactive programming B does not satisfy the NC software requirements.
[Code]
1->The MSB file for IMAPB and interactive programming B is not compatible with the NC software.
[Measures to Take]
Use an MSB file of revision B or later to run the IMAPB or interactive programming B.
0805 MOP-Tool parameter PBU load
The backup file (MMTUBuu.PBU) is not found, or its type or size is wrong.
[Code]
1-> Parameter PBU file (MMTUBuu.PBU) is not in MD0:.
2-> Parameter PBU file (MMTUBuu.PBU) does not start from «PBU1» or has an improper file length (not $18 sectors).
[Probable Faulty Locations]
1)If the alarm occurred during NC operation, the PBU file has been deleted or its data has been destroyed.
2)If the alarm occurred without NC operation after installation of control floppy disk, the PBU file type was wrong or no PBU file was stored in the memory.
[Measures to Take]
1)If the alarm occurred during NC operation, reinstall the control floppy disk. 2)If the alarm occurred before NC operation, create a correct control floppy.
0806 MOP-Tool tool data PBU load

5921-E P-36
SECTION 2 ALARM P
The backup file (MMTUAuu.PBU) is not found, or its type or size is wrong.
[Code]
3->The tool data PBU file (MMTUAuu.PBU) is not found in MD0:.
4->The tool data PBU file (MMTUAuu.PBU) does not start from «PBU1» or has an improper file length (not $125 sectors).
[Probable Faulty Locations]
1)If the alarm occurred during NC operation, the PBU file has been deleted or its data has been destroyed.
2)If the alarm occurred without NC operation after installation of control floppy disk, the PBU file type was wrong or no PBU file was stored in the memory.
[Measures to Take]
1)If the alarm occurred during NC operation, reinstall the control floppy disk. 2)If the alarm occurred before NC operation, create a correct control floppy.
0807 ACP panel status receipt error
The ACP board received an abnormal operation panel status.
[Code]
XX (operation panel status data) bit7->Invalid panel status bit6->Operation panel CPU error
bit3 to 5->Software version applied to operation panel firmware bit0 to 2->Operation panel type
0808 Speed change ratio failure
On the machine with high speed profiling function,an improper speed change ratio is set on X, Y, Z, or Caxis or a wrong type of position encoder is used.
[Code]
1->Xaxis speed change ratio is set with a code. 2->Yaxis speed change ratio is set with a code. 3->Zaxis speed change ratio is set with a code. 4->Caxis speed change ratio is set with a code.
5->Xaxis speed change ratio exceeds the setting range. 6->Yaxis speed change ratio exceeds the setting range. 7->Zaxis speed change ratio exceeds the setting range. 8->Caxis speed change ratio exceeds the setting range. 9->A wrong type of position encoder is used.
[Probable Faulty Locations]
Speed change ratio data in the servo data PBU file,or encoder type
[Measures to Take]
Correct the servo data PBU file.
0810 NC I/O data file read
The NC failed to read I/O data file.
[Code]
I/O data file load status (in hexadecimal) 2->File open error (no file)
3->File read error (no data)
4->File attribute error (not «PBU1»)
5->File close error
6->File size error (too small)
7->File size error (too large)
100->Wrong PLC machine type
200->Wrong PLC class
300->Wrong file version
0812 MCS initialization error
An error occurred in initialization of MCS when the power was supplied.
[Index]
None or axis name
[Character-string] Varies with the code.

5921-E P-37
SECTION 2 ALARM P
[Code] XXXXYYYY
XXXX:Kind of generated alarm
YYYY:Further information on the alarm (Varies with XXXX.)
XXXX
FFFF…YYYY is 00UV. Where, U: Faulty channel number — 1 0= Channel 1
1= Channel 2 2= Channel 3
V: Cause of alarm (V=1 indicates that servo link mode has not been established.) FF01…Memory error occurred in read/write test of the servolink I/O buffer.
YYYY= 0 (always)
Character-string shows the address where the error occurred.
FF00…Communication LSI caused an error in read/write test of the servo link I/O buffer. YYYY= Error status
Character-string shows the address where the error occurred. F000…
YYYY=bit 7:Same ID number used bit 6:Improper ID number bit 5:Missing ID number
bit 4:Too many CH4 controllers bit 3:Too many CH3 controllers bit 2:Too many CH2 controllers bit 1:Too many CH1 controllers bit 0:
With this error, connection data appears in the screen center.
EF00…The servo link does not connect with all the required axes or connects with an improper axis. YYYY= ID number of required axis controller
Character-string shows the problem axis name.
With this alarm, connection data appears in the screen center. EE00…An error occurred in downloading an optional file.
High-order digit of
YYYY shows the cause while low-order part is an error code.
If high-order digit=
1:File is not in OSP format.
2:File attribute is not contiguous.
3:File opening error. Low-order part is an error code.
4:Error in initial data reading. Low-order part is an error code.
5:File does not start with «MCS1».
6:File name is not followed by «OPFS».
7:The number of file sets is 0.
8:Data reading error. Low-order part is an error code.
9:File data has a sector length of 0.
A:The number of bytes transferred is 0.
B:File data has a sector length smaller than the number of bytes transferred.
C:Data reading error. Low-order part is an error code.
ED00…An error occurred when manual mode is switched to auto mode. High-order digit of
YYYY shows the cause while low-order part is an error code. High order digit=1: World clock does not start. EC01…Time difference occurred in setting CH1 timer.
YYYY is the difference.
EC02…Time difference occurred in setting CH2 timer. YYYY is the difference.
EC03…Time difference occurred in setting CH3 timer. YYYY is the difference.
D001…In buffering the initial data in AT (auto) receive mode, the software synchronization bit does not come on within 3 seconds.
YYYY is always 0.
D002…In buffering the initial data in AT (auto) receive mode, the buffer A received a wrong format code. Two low-order characters of
YYYY are the received format code.
D003…In buffering the initial data in AT (auto) receive mode, the buffer B received a wrong format code in the first block. YYYY is the received format code.
D004…In buffering the initial data in AT (auto) receive mode, the buffer B received a wrong format code in the second block. YYYY is the received format code.
D005…In buffering the initial data in AT (auto) receive mode, the buffer B received a wrong format code in the third block. YYYY is the received format code.
D006…In buffering the initial data in AT (auto) receive mode, the buffer B received a wrong format code in the fourth block. YYYY is the received format code.

5921-E P-38
SECTION 2 ALARM P
D007…In buffering the initial data in AT (auto) receive mode, the buffer B received a wrong format code in the fifth block. YYYY is the received format code.
D008…In buffering the initial data in AT (auto) receive mode, the buffer B received a wrong format code in the sixth block. YYYY is the received format code.
D009…In buffering the initial data in AT (auto) receive mode, the buffer B received a wrong format code in the seventh block. YYYY is the received format code.
D00A…In buffering the initial data in AT (auto) receive mode, the buffer B received a wrong format code in the eighth block. YYYY is the received format code.
D010…In buffering the initial data in AT (auto) receive mode, the received self-diagnostic data is not $55. YYYY is the received diagnostic data.
D011…In buffering the initial data in AT (auto) receive mode, the buffer A received the bit data which is wrong at bit No. 0 and No. 1.
YYYY is the received data.
D012…In buffering the initial data in AT (auto) receive mode, the buffer A received the bit data which is wrong at bit No. 2 and No. 3.
YYYY is the received data.
D013…In buffering the initial data in AT (auto) receive mode, the buffer A received the bit data which is wrong at bit No. 4 and No. 5.
YYYY is the received data.
D080…Initial data buffered in AT (auto) receive mode includes wrong data at ID data No. 441C. YYYY is the received data.
D081…Initial data buffered in AT (auto) receive mode includes wrong data at ID data No. 2428. D090…Initial data buffered in AT (auto) receive mode includes wrong data at ID data No. 4405.
YYYY is the received data.
D091…Initial data buffered in AT (auto) receive mode includes wrong data at ID data No. 4404. YYYY is the received data.
D092…Initial data buffered in AT (auto) receive mode includes wrong offset data for compensating positioning points. YYYY is the received data.
[Probable Faulty Locations]
—Inverter unit (Check the LED of the inverter unit.)
—Improper ID number set in MCS
—Specification code setting error
—Erroneous connection with MCS
0813 MCS Communication error
When the power was supplied, an error occurred in communication with MCS.
If servo link information is displayed at the center of the screen, judge the cause by taking into consideration the message in the servo link information.
[Index] None
[Character-string]
[command name]-[channel No.]-network address (controller No.)
[Code] XXXXYYYY XXXX:
1…The NC received the data that the NC had broadcasted. YYYY: information of the received frame
2…Data is received from a station other than the slave station that broadcasted the data. YYYY: information of the received frame
3…The received data size is 2 bytes or less. YYYY: always 0
4…Data is received from a station other than the slave station that sent the date. YYYY: information of the received frame
5…The NC received the data that the NC had transmitted in a way other than broadcasting. YYYY: information of the received frame
6…Data is received from a the station of which network address is 0. YYYY: information of the received frame
7…Data reception response is not sent within 1 or 0.1 second after data transmission. YYYY: Always 0
‘SI’ command is specified before at least one MCS is normally activated in the link or before the power is supplied. Open the box and check the LEDs of all the MCS units connected to the error-caused channel.
Normal units are indicated with ’22’.
8…Data transmission does not end within 0.1 second. YYYY: Always 0
9…Communication error occurred after reception of data.

5921-E P-39
SECTION 2 ALARM P
YYYY: Error status
A…Communication error occurred while the NC was waiting for data reception or immediately after data transmission. YYYY: Error status
B…Communication error occurred while the NC was waiting for data transmission. YYYY: Error status
C…Data transmission was attempted during data transmission. YYYY: NC operation status
D…Data transmission was attempted in the state of communication error. YYYY: Error status
E…An error command was received.
Two high-order digits of YYYY are a code (45: exception; 41: alarm; 57: warning; 54: error) while low-order digits are the number.
[Refer to the shake-hand communication error list (5-10) in external specification for MCS controller function.] 100…The received first 2 bytes are improper as a response to the transmitted data.
YYYY: Received first 2 bytes
101…The received data size is improper as a response to the transmitted data.High-order digits of YYYY is the received data size while the low-order half is a normal value.
102…Data No. 1 attached to the received data is improper. YYYY: Two high-order bytes of the data judged to be improper SI command: slave station connection No.
AS command: slave station connection No.
ID command: communication code + auxiliary code 103…Data No. 2 attached to the received data is improper.
YYYY: Two high-order bytes of the data judged to be improper SI command: cumulative relay time
ID command: data ID
104…Data No. 3 attached to the received data is improper. YYYY: two high-order bytes of the data judged to be improper ID command: reserved
105…Data No. 4 attached to the received data is improper. YYYY: Two high-order bytes of the data judged to be improper ID command: ID data (4 bytes or less)
106…Data No. 5 attached to the received data is improper. YYYY: Two high-order bytes of the data judged to be improper SI command: The number of controllers
ID command: ID data (8 bytes)
200…Data sizes differ from those specified with ID numbers. Faulty software
[Probable Faulty Locations]
—Inverter unit (Check the LED of the inverter unit.)
—FCP board
—MCS connection error
—MCS connection cable is faulty
—Faulty software
0814 MCS data file corrupt
When the power was supplied, an error occurred in reading or transferring the servo link data file. Or, the data file includes abnormal data.
[Character-string]
[axis name] [device name] [file name] or none
[Code]
XYZZAAAA
X: Axis kind; Y: Rough classification; ZZ: Minute classification; AAAA: Data X:1= NC-controlled axis
2= spindle
3= PLC-controlled axis
Y:0= Error in reading servo data file ZZ:
01= Error occurred in retrieval of the file. AAAA=error code
AAAA indicates that the data file does not exist at 000B: or the required axis data does not exists in the file. 02= File attribute is not contiguous.
03= File is not in OSP format.
04= File opening error. AAAA=error code 05= File data reading error. AAAA=error code 06= File does not start with «PBU1».

5921-E P-40
SECTION 2 ALARM P
07= File name is not followed by «M1».
08= The relevant axis data has exceeded the maximum number of data sets stored in the file before the specified number of data sets are transferred.
09= File closing error. AAAA=error code
0A= A set of data size is larger than 8 sectors. AAAA=number of data sectors 0B= Data reading error. AAAA=error code
0C= The data file does not contain the previously specified number of data sets. 0D= The data serial number does not match.
0E= The data type does not match.
0F= The whole number of data sets does not match. 10= File closing error. AAAA=error code
11= Servo data does not exist in the file where NC axis data exists. Y:1= Error in checking servo data file
ZZ:
01= The NC axis data file of NC axis control for heavy workpiece specification is not found.
02= Axis specification (rotary or limited) or unit system does not match. AAAA=axis specification data 03= Acceleration/deceleration method does not match.
04= Inductosyn is not provided.
05= The number of data sets is abnormal (the number of spindle data sets is not within 1 to 32). AAA=the number of data sets
06= The speed-time constant characteristic data includes faulty data with reversed inequality. AAAA=Two high-order digits show the axis number while low-order digits are the error content. High-order AA:
00-> X-axis
01-> Y-axis
02-> Z-axis
03-> 4th axis
04-> 5th axis Low-order AA:
11-> FT1max=0
12-> FT1max<FT1min
13-> FT1max=FT1min and T1max<T1min
14-> FT1max>FT1min and T1max<T1min
21-> FT2max=0 (FT2max is determined by internal calculation.) 22-> FT2max<FT2min
23-> FT2max=FT2min and T2max<T2min
24-> FT2max>FT2min and T2max<T2min
07= The servo data to be used with the NC axis data for heavy workpiece specification is not found. 08= Abnormality is found in data for the premium thread cutting mode.
AAAA=00-> The servo data for the premium thread cutting mode is not found.
=01-> The operation result of the round-up acceleration exceeded the permissible value. 09= The number of slave axis of the spindle tandem control is not found.
The number of slave axis is four or more.
AABB: Set values of number of slave axis of the spindle tandem control in the axis data file.
[Probable Faulty Locations] — Axis data file
0815 PLC real-time task loop error
The real time task indicated by the character-string failed to end within the preset processing time.
[Object] None
[Character-string] AAAABB
AAAA-> Task name being processed when the loop error was detected. BB-> Program module number being executed (hexadecimal)
[Code]
XXXXXXXX-> Program counter value (hexadecimal) at the time of error detection [Probable Faulty Locations]
—Level 2 or level 3 task in the PLC sequence program failed to end processing within the preset time.
—Timing error of synchronous signal
—Wrongly set synchronous signal frequency
0816 PLC initialization error

5921-E P-41
SECTION 2 ALARM P
An error was detected in the checking process for activating the PLC.
[Index] None
[Character-string] None
[Code]
XX
=1…NC-PLC synchronous parameter is not found.
[Measures to Take]
Consult the machine maker.
0817 MCS error
An error occurred under the control by MCS.
[Index]
Axis name or none
[Character-string] None
[Code] XXZZAAAA XYZZ: 0 AAAA:
1= Processing does not end within 5 seconds after MCS reset 1. 2= Processing does not end within 5 seconds after MCS reset 2.
3= Processing does not end within 5 seconds after PLC reset processing 1. 4= Processing does not end within 5 seconds after PLC reset processing 2. X: 1 to 3
X: Channel number
YZZAAAA: Communication error status [Probable Faulty Locations]
—Faulty MCS controller
—Faulty servo link on FCP board
—Faulty software
0818 ADP initialization failure
An alarm occurred while the AD conversion processor board was initialized after power ON.
[Object] None
[Character-string] None
[Code]
X
X=1:Synchronous counter value remains 1.
X=2:A system alarm occurred when the synchronous counter value was 1. X=3:Synchronous counter value remains 3.
X=4:A system alarm occurred when the synchronous counter value was 3.
[Probable Faulty Locations]
1 ADP(AD conversion processor board)
[Measures to Take]
Replace the ADP(AD conversion processor board).
[Related Specifications]
Thermal deviation compensation
0820 Machine data file read
At power on, the machine data file (GNCUB*.PBU) cannot be read from memory (sector device MD0A:) correctly.
[Object] None
[Character-string] None

5921-E P-42
SECTION 2 ALARM P
[Code]
1 -> The file is not stored in memory, or file name is different. 2 -> The file type is not «PBU2».
3 -> File DB size is too large.
4 -> File DB side is too small. [Probable Faulty Locations]
1)The machine data PBU file is not stored in the floppy disk shipped with the NC.
2)Operation procedure for loading the PBU file from the floppy disk to the NC memory is incorrect. (A COPY command must not be used.)
3)Memory error
[Measures to Take]
1)Check the control floppy disk if the machine data file (GNCUB*.PBU) is stored on it.
2)Load the control floppy disk again.
3)Replace the memory.
0821 Spindle gear ratio
For the spindle speed control, the gear ratio data set in the servo data PBU file (SVGU*.PBU) is incorrect.
1)If the gear ratio data is set by the gear ratio code, the gear ratio code is not $2F — $3F.
2)If the gear ratio data is specified directly, the data is not 0 — 2048 (or 7200).
3)For the high-speed cam grinding specifications, the gear ratio data is set by the gear ratio code.
4)For the high-speed cam grinding specifications, the data is not 0 — 2048 (or 7200).
[Object] None
[Character-string] None
[Code]
1 -> Setting of gear ratio data by gear ratio code 2 -> Direct setting of gear ratio data
3 -> X-axis gear ratio data is set by the code. 4 -> C-axis gear ratio data is set by the code.
5 -> X-axis gear ratio data is outside the setting range. 6 -> C-axis gear ratio data is outside the setting range.
[Probable Faulty Locations]
Gear ratio data in the servo data PBU file (SVGU*.PBU)
[Measures to Take]
Correct the gear ratio data in the servo data PBU file.
0822 Wheel data file read
At power on, the wheel data pair number extension file (GNCUD*.PBU) cannot be read from memory (sector device MD0A:) correctly.
[Object] None
[Character-string] None
[Code]
1 ->The file is not stored in memory, or file name is different. 2 ->The file type is not «PBU3».
3 ->File DB size is too large.
4 ->File DB side is too small.
[Probable Faulty Locations]
1 The wheel data pair number extension file is not stored in the floppy disk shipped with the NC. 2)Operation procedure for loading the PBU file from the floppy disk to the NC memory is incorrect.
(A COPY command must not be used.) 3)Memory error
[Measures to Take]
1)Check the control floppy disk if the wheel data pair number extension file (GNCUD*.PBU) is stored on it. 2)Load the control floppy disk again.
3)Replace the memory.
0823 AXIS CONSTRUCTION DATA setting error
cnc-club.ru
Статьи, обзоры, цены на станки и комплектующие.
Ошибки в FANUC Oi-TD
Ошибки в FANUC Oi-TD
Сообщение Костян челябинский » 12 сен 2016, 12:40

Re: Ошибки в FANUC Oi-TD
Сообщение odekolon » 12 сен 2016, 21:57
на самом деле, подозреваю, что крутые специалисты по фанукам , здесь не тусуются.
я к фануку подошел 2 недели назад, поэтому не стоит мои советы рассматривать как окончательные
сначала я бы почитал мануалы хотя бы отсюда
http://www.chipmaker.ru/files/file/10979/
у фануков, буква M в названии системы означает фрезерный а Т — токарный
таким образом, тебе нужны мануалы на FANUC 0i-D
в каждом мануале часто есть ссылки на другие мануалы этой серии. Дальше — гуглить «FANUC — код мануала — pdf»
потом осмотрел бы все вентиляторы, особенно на драйверах и сервах.
подобные сообщения, может генерить также программа электроавтоматики (PMC) — это «сердце» конкретного станка. ее пишет производитель конкретного станка под свое электрооборудование.
На моем станке — программа запаролена. может оно и к лучшему — сломать труднее.
если сообщения генеряться электроавтоматикой, то понять эти сообщения можно только прочитав РЭ на конкретный станок
но китайцы обычно ленятся писать подробно и понятно
в общем гуглить, читать, думать и опять гуглить..
ЗЫ
а может повезет и откликнется владелец такого же станка!

Re: Ошибки в FANUC Oi-TD
Сообщение Lexxa » 13 сен 2016, 15:22
1) проверить вентиляторы. Кроме вентиляторов на сервосистеме есть венттиляторы на самой чпу (это то что с экраном). Гарантированно один из них подклинивает — обычное дело, засирается все пылью. Достаточно продуть и протереть корпус, чтобы кыльчатка не застревала.
2) ошибки типа ошибка привода шпинделя. У фанука привод шпинделя цепляется не по FSSB а по отдельному кабелю. Кабель этот соединяет ЧПУ (то что с экраном) с приводом. Привода подач соединины последовательно оптикой. Частенько проблема в разъемах.
Более детально вы можете найти информацию в руководстве по тех. обслуживанию и в Connection Manual (hardware) на стойку 0i модель D, если не найдете — ищите на С, там практически все то же самое.
Успехов.

Re: Ошибки в FANUC Oi-TD
Сообщение Костян челябинский » 13 сен 2016, 20:59
Источник
cnc-club.ru
Статьи, обзоры, цены на станки и комплектующие.
FANUC ERROR 607, 613 [ РЕШЕНО! подробности в теме]

FANUC ERROR 607, 613 [ РЕШЕНО! подробности в теме]
Сообщение EX854508 » 22 янв 2019, 09:40
Здравствуйте, форумчане!
Несколько раз встречал подобные темы в инете, но решил систематизировать и представить на суд общественности удобноперевариваемый рецепт лечения ошибок 607, 613 для привода FANUC BiSVSP 40/40-15 A06B-6134-H203 в случае, если ошибка связана непосредственно с ним.
В данном конкретном случае используется система ЧПУ Fanuc 0i-TC
Проблема заключается в следующем — при включении станка возникают ошибки подобного рода (Рис. 1):
1001 SPINDLE DRIVER FAULT (A0.1)
100 ЗАПИСЬ ПАРАМЕТРОВ РАЗРЕШЕНА
401 СБОЙ СЕРВО : X ОСЬ VRDY ВЫКЛ
401 СБОЙ СЕРВО : Z ОСЬ VRDY ВЫКЛ
607 X ОСЬ: ОДНОФАЗН СБОЙ КОНВЕРТЕРА
613 X ОСЬ: ОДНОФАЗН СБОЙ КОНВЕРТЕРА
607 Z ОСЬ: ОДНОФАЗН СБОЙ КОНВЕРТЕРА
613 Z ОСЬ: ОДНОФАЗН СБОЙ КОНВЕРТЕРА
9004 ШПНД 1:СБОЙ ВХОД ПРЕДОХР/ПИТАНИЯ
Из всего этого сумбура выделяем следующие ошибки: 607, 613. Проверяем целостность линий питания, клеммных колодок, если таковые есть, элементы силовой части — контакторы, автоматы и прочее — и если все указанное не вызывает сомнений, выдвигаем в главные подозреваемые привод.
Соответственно, до всех активных действий, делаем резервные копии программ и параметров.
Если ничего более не вызывает сомнений, демонтируем привод и снимаем верхнюю крышку корпуса привода.
Как показано на Рис. 2 — проблема видна на лицо: поджаренные SMD резисторы в нижней части платы. Фото с тыльной стороны.
Как правило, сами SMD компоненты наврятли повреждены, что нельзя сказать о дорожках и переходных точках. С каждой из трех фаз дорожка приходит на шесть последовательно соединенных резистора сопротивлением 2,4 кОм каждый, фазы S и T выполнены одинаково, а вот по фазе R два крайних резистора размещены на тыльной части платы; затем крайний резистор каждой фазы — RR6, RS6, RT6 соединен дорожкой с точками, показанными на Рис. 3.
Результирующее сопротивление между фазными клеммными соединениями и конечными точками должно быть около 14,5 кОм.
В случае нарушения целостности дорожек или SMD компонентов — лепим перемычки или меняем оные.
Рис. 4, 5 — восстановленные дорожки.
Собираем, запускаем, устанавливаем нули — и радуемся!
Источник
Ошибка Fanuc DS0300
Ошибка Fanuc DS0300 – села батарейка, что делать?
 В первую очередь не стоит паниковать! Данная ситуация крайне распространена и легко поддаётся “лечению” – главное всё сделать правильно и не торопиться. Для полного понимания процесса просим Вас внимательно изучить нашу статью! Если на станке ДРУГАЯ ОШИБКА (не связанная с батарейкой) и Вы попали на эту страницу случайно, то рекомендуем Вам перейти по ссылке: “Ошибки FANUC. Расшифровка и рекомендации“. Там собрана полезная информация не только по ошибкам, но и по методам их диагностики.
В первую очередь не стоит паниковать! Данная ситуация крайне распространена и легко поддаётся “лечению” – главное всё сделать правильно и не торопиться. Для полного понимания процесса просим Вас внимательно изучить нашу статью! Если на станке ДРУГАЯ ОШИБКА (не связанная с батарейкой) и Вы попали на эту страницу случайно, то рекомендуем Вам перейти по ссылке: “Ошибки FANUC. Расшифровка и рекомендации“. Там собрана полезная информация не только по ошибкам, но и по методам их диагностики.
О чём нам сообщает станок?
В первую очередь необходимо прочитать ошибки с экрана станка, которые можно открыть нажатием клавиши MESSAGE. Там могут быть ошибки следующего содержимого на разных языках:
- DS0300 APC ALARM : (X) AXIS NEED ZRN
- DS0300 APC АВ. С : (Y) НЕОБХ. ВОЗВР. В ИСХ. Т
- DS0307 (Z) APC ALARM : BATTERY LOW 1
- DS0307 (X) APC АВ. СООБ : РАЗР. БАТАР. 1
Вариантов отображения может быть значительно больше, в том числе и на китайском! “Кривой” перевод ошибок на русский порождает еще большее количество интерпретаций – это не важно! Если в списке ошибок встречаются слова BATTERY, БАТАРЕЯ, LOW, РАЗРЯЖЕНА, ZRN, ВОЗВРАТ В ИСХОДНУЮ ТОЧКУ и т.д… А также, всё это сопровождается перечислением координат X, Y, Z – значит причина установлена. Это может быть:
- Разрядившаяся батарея Fanuc (игнорирование предупреждающих сообщений)
- Неправильно заменённая батарея Fanuc (например, на выключенном станке)
- Отсоединение провода энкодера от серводвигателя (при ремонтах и техническом обслуживании)
Зачем нужна эта батарея и где она находится?
Первое и самое важное – Fanuc батарейка позволяет станку не забывать свои координаты при выключенном питании. Вначале, при понижении заряда батареи, станок выдаёт соответствующее предупреждающее сообщение. После первого появления сообщения о низком заряде батареи необходимо как можно скорее её заменить. Вы можете приобрести её у нас, написав нам по форме обратной связи или позвонив по телефону +7 (495) 211-51-66. Заменять батарею необходимо ТОЛЬКО НА ВКЛЮЧЕННОМ СТАНКЕ! Если сообщение было проигнорировано и батарею вовремя не заменили, то в последствии “слетает” машинный ноль станка и потребуется его повторная привязка, требующая ОСТОРОЖНОСТИ!
 Батарейку необходимо искать внутри электрошкафа станка, на жёлтом блоке Fanuc. Обычно она располагается в коробочке, подвешенной на этот блок управления приводами. Батарейка соединена с блоком при помощи провода с разъёмом. Иногда, например на станках Takisawa, батарейку выносят снаружи электрошкафа и заменяют её на обычные батарейки высокой ёмкости типа D. Их легко купить в любом магазине, а также Вам нет необходимости вызывать электрика для осуществления работ внутри электрошкафа. Такие батарейки могут эксплуатироваться до 5-ти лет, в то время как стандартную батарейку Fanuc необходимо менять 1 раз в год.
Батарейку необходимо искать внутри электрошкафа станка, на жёлтом блоке Fanuc. Обычно она располагается в коробочке, подвешенной на этот блок управления приводами. Батарейка соединена с блоком при помощи провода с разъёмом. Иногда, например на станках Takisawa, батарейку выносят снаружи электрошкафа и заменяют её на обычные батарейки высокой ёмкости типа D. Их легко купить в любом магазине, а также Вам нет необходимости вызывать электрика для осуществления работ внутри электрошкафа. Такие батарейки могут эксплуатироваться до 5-ти лет, в то время как стандартную батарейку Fanuc необходимо менять 1 раз в год.
На что следует обратить особое внимание?
ВАЖНО. Во избежание серьёзных поломок оборудования рекомендуется визуально контролировать перемещаемые элементы станка на соударение. Для этого требуется снять защитные кожуха перепривязываемых осей. Отметку максимально возможного хода подвижного элемента можно определить по старым масляным следам на направляющих и гайке ШВП. Неправильная привязка осей относительно исходного нуля (с погрешностью более 5мм) может привести к вылету стола станка за свои механические пределы, так как при смещении машинного нуля поле допустимого перемещения смещается вместе с ним! После перепривязки осей ОБЯЗАТЕЛЬНО проверяйте максимальный ход по осям на маленьких скоростях.
Какая последовательность действий?
1. Переходим к параметру 1815 (MDI → SYSTEM → 1815 → SEARCH) – это параметр установки машинного нуля станка по координатам. На рисунке изображено исходное состояние параметра 1815. Если привязка машинных нулей “слетела”, то у Вас в столбце APZ будут стоять нули и это не должно Вас смущать.
2. Не забываем перед изменением параметров разрешить их редактирование ( MDI → SET/OFS → SETING → PARAMETER WRITE = 1 ). Заморгает ошибка “редактирование параметров разрешено” – это Вас также не должно смущать
3. Для начала изменения машинных координат необходимо в биты APZ и APC ввести нули, как на картинке и выполнить перезагрузку ЧПУ. Если Вам необходимо привязать только одну ось (например после ремонта или замены двигателя), то выполняйте данную последовательность только для нужной оси, а не для всех одновременно.
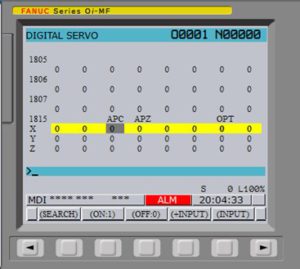
4. Возвращаемся к параметру 1815 и вводим в биты APC единичные значения. Введя значения снова производим перезагрузку ЧПУ.

5. Включив станок перемещаем оси в требуемое нам нулевое положение машинной системы координат (как определить точку машинных координат подробно изложено в следующем разделе). Перемещение станка осуществляется в режиме JOG при этом не рекомендуется использовать ускоренную подачу, так как в данном режиме ход осей не ограничен! Установив оси станка в нужное положение вводим единички в биты APZ и последний раз перезагружаем ЧПУ.
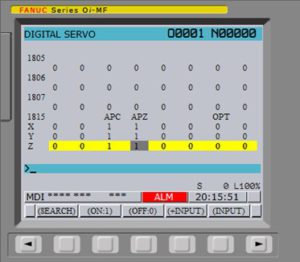
6. Все ошибки с экрана должны исчезнуть, но не спешите радоваться! Ещё нужно проверить правильность проделанных Вами действий! Для этого ознакомьтесь со следующим разделом статьи.
ВНИМАНИЕ. Изменение машинного нуля не приведёт к изменению параметров 1320 и 1321 (они отвечают за ограничения рабочей зоны станка и лимиты перемещений). Поэтому не забудьте их проверить и отредактировать при необходимости.
Как определить нулевое положение машинных координат?
Перед перепривязкой машинной системы координат (МСК) необходимо определить место, где будет находиться новый ноль станка. Для этого начнём с начала. Аксиомой является то, что привязать ноль МСК можно абсолютно в любое место. Нас ограничивают только геометрические параметры станка. Для простоты мы будем привязывать МСК в её предыдущее положение.
Исходными данными для определения этой точки будут значения, установленные в параметрах 1320 и 1321. Эти параметры определяли координаты, за которые станку нельзя было перемещаться. Своего рода программные концевики. При подходе стола к этим координатам ЧПУ останавливает сервопривод, что предохраняет станок от повреждения. Картинка и рисунок ниже помогут Вам понять, за что отвечают значения установленные в параметрах 1320 и 1321.
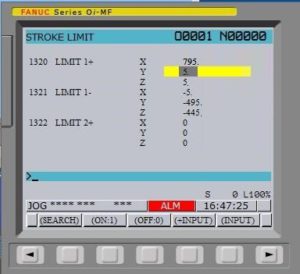
Взяв эти параметры можно рассчитать примерное положение МСК до проведения работ. При этом нужно понимать, что рабочее поле станка может отличаться от размера стола. На картинке рабочее поле станка показано красным прямоугольником. Центр прямоугольника будет соответствовать центру стола. Для большей точности можно нарисовать рабочее поле прямо на столе (маркером) и установить в шпиндель инструмент с острым кончиком (сверло). Кончик сверла необходимо подвести к точке найденного и отмеченного машинного нуля по осям X и Y, а ось Z поднять на максимальную высоту (разумеется не до столкновения гайки ШВП с опорой винта). Максимальную высоту имеет смысл проконтролировать по следам на направляющих.

Корректировка Z координаты смены инструмента.
Невозможно привязать машинный ноль строго в значение, где он был раньше. Поэтому точка смены инструмента также может сместиться! Смещение более 0.2 мм уже может стать причиной серьёзной аварии, поэтому после перепривязки машинного нуля по оси Z обязательно нужно перепроверить координату смены инструмента (параметр 1240)
Определяется необходимое значение в ручном режиме, путём подвода шпинделя в необходимою позицию по оси Z. Ни в коем случае нельзя менять инструмент в автоматическом режиме, до проверки правильности установленной координаты. На картинке показана правильная позиция смены инструмента, расстояние Т зависит от типоразмера конуса патрона.
Установив инструмент в нужную позицию считайте новые машинные координаты смены инструмента из меню POS. Полученные значения вводятся в параметр 1240.
Источник
Fanuc SOi mate-md
![]()
G. СПИСОК СИГНАЛОВ ТРЕВОГИ
7n51 SPN_n_ : LOW VOLT DC LINK (ШПИНДЕЛЬ _n_ : НИЗКОЕ НАПРЯЖЕНИЕ ЦЕПИ ПОСТОЯННОГО ТОКА)
7n52 SPN_n_ : ITP SIGNAL ABNORMAL I (ШПИНДЕЛЬ _n_ : НЕВЕРНЫЙ СИГНАЛ ITP I)
7n53 SPN_n_ : ITP SIGNAL ABNORMAL I (ШПИНДЕЛЬ _n_ : НЕВЕРНЫЙ СИГНАЛ ITP II)
7n54 SPN_n_ : OVERLOAD CURRENT (ШПИНДЕЛЬ _n_ : ПЕРЕГРУЗКА ПО ТОКУ)
7n73 SPN_n_ : MOTOR SENSOR DISCONNECTED (ШПИНДЕЛЬ _n_ : РАЗРЫВ СОЕДИНЕНИЯ С ДАТЧИКОМ МОТОРА)
7n74 SPN_n_ : CPU TEST ERROR (ШПИНДЕЛЬ _n_ : ОШИБКА ТЕСТИРОВАНИЯ ЦП)
7n75 SPN_n_ : CRC ERROR (ШПИНДЕЛЬ _n_ : ОШИБКА CRC)
7n79 SPN_n_ : INITIAL TEST ERROR (ШПИНДЕЛЬ _n_ : ОШИБКА ПЕРВОНАЧАЛЬНОГО ТЕСТИРОВАНИЯ)
сбой в питании или плохой
Обнаружена неисправность в
интерфейсе ЧУ (прекратился
Обнаружена неисправность в
интерфейсе ЧУ (прекратился
Температура радиатора чрез-
Отсутствует сигнал обратной
При тестировании CRC обна-
79 Замените печатную плату При операции первоначальуправления SVPM. ного тестировании обнару-

G. СПИСОК СИГНАЛОВ ТРЕВОГИ
Не выдается сигнал одного
СИГНАЛ ТРЕВОГИ ДРУГОГО КОНВЕРТОРА)

G. СПИСОК СИГНАЛОВ ТРЕВОГИ
Проверьте состояние входного
1 Проверьте и исправьте па-
2 Замените кабель обратной
Проверьте, имеется ли ошибка
дана ли синхронизация шпи-
2 Если останавливается вен-

G. СПИСОК СИГНАЛОВ ТРЕВОГИ
9011 SPN_n_ : OVERVOLT POW CIRCUIT (ШПИНДЕЛЬ _n_ : ЦЕПЬ ПИТАНИЯ С ПЕРЕНАПРЯЖЕНИЕМ)
9012 SPN_n_ : OVERCURRENT POW CIRCUIT (ШПИНДЕЛЬ _n_ : ЦЕПЬ ПИТАНИЯ С ПЕРЕГРУЗКОЙ ПО ТОКУ)
9018 SPN_n_ : SUMCHECK ERROR PGM DATA (ШПИНДЕЛЬ _n_ : ДАННЫЕ ПРОГРАММЫ С ОШИБКОЙ В КОНТРОЛЬНОЙ СУММЕ)
9019 SPN_n_ : EX OFFSET CURRENT U (ШПИНДЕЛЬ _n_ : ЧРЕЗМЕРНОЕ СМЕЩЕНИЕ ТОКА
9020 SPN_n_ : EX OFFSET CURRENT V (ШПИНДЕЛЬ _n_ : ЧРЕЗМЕРНОЕ СМЕЩЕНИЕ ТОКА V)
9021 SPN_n_ : POS SENSOR POLARITY ERROR (ШПИНДЕЛЬ _n_ : ОШИБКА ПОЛЯРНОСТИ ДАТЧИКА ПОЛОЖЕНИЯ)
9024 SPN_n_ : SERIAL TRANSFER ERROR (ШПИНДЕЛЬ _n_ : ОШИБКА ПОСЛЕДОВАТЕЛЬНОЙ ПЕРЕДАЧИ)
11 Проверьте входное напряОбнаружено перенапряжение питания и изменение в жение на участке цепи
питании во время торможения
мотора. Если напряжение пре-
тока, увеличьте полное соп-
Проверьте и исправьте пара-
24 1 Расположите кабель соедиПитание ЧПУ отключено нения шпинделя с ЧПУ в (обычное отключение пи-
стороне от кабеля питания.

G. СПИСОК СИГНАЛОВ ТРЕВОГИ
Проверьте и откорректируйте
Проверьте и откорректируйте
водством. Если номер параме-
проверьте обозначенный пара-

G. СПИСОК СИГНАЛОВ ТРЕВОГИ
значение изменения положе-
в соответствии с руководст-

G. СПИСОК СИГНАЛОВ ТРЕВОГИ
9050 SPN_n_ : SPNDL CONTROL OVERSPEED (ШПИНДЕЛЬ _n_ : ПРЕВЫШЕНИЕ СКОРОСТИ УПРАВЛЕНИЯ ШПИНДЕЛЕМ)
9051 SPN_n_ : LOW VOLT DC LINK (ШПИНДЕЛЬ _n_ : НИЗКОЕ НАПРЯЖЕНИЕ ЦЕПИ ПОСТОЯННОГО ТОКА)
9052 SPN_n_ : ITP SIGNAL ABNORMAL I (ШПИНДЕЛЬ _n_ : НЕВЕРНЫЙ СИГНАЛ ITP I)
9053 SPN_n_ : ITP SIGNAL ABNORMAL I (ШПИНДЕЛЬ _n_ : НЕВЕРНЫЙ СИГНАЛ ITP II)
9054 SPN_n_ : OVERLOAD — CURRENT (ШПИНДЕЛЬ _n_ : ПЕРЕГРУЗКА ПО ТОКУ)
9058 SPN_n_ : OVERLOAD IN SVPM
9073 SPN_n_ : MOTOR SENSOR DISCONNECTED (ШПИНДЕЛЬ _n_ : РАЗРЫВ СОЕДИНЕНИЯ С ДАТЧИКОМ МОТОРА)
9074 SPN_n_ : CPU TEST ERROR (ШПИНДЕЛЬ _n_ : ОШИБКА ТЕСТИРОВАНИЯ ЦП)
9075 SPN_n_ : CRC ERROR (ШПИНДЕЛЬ _n_ : ОШИБКА CRC)
50 Проверьте, не превышает ли При синхронизации шпинвычисленное значение макс. деля программируемое
Проверьте и отрегулируйте
2 Замените в ЧПУ печатную (прекратился сигнал ITP). плату интерфейса шпинделя.
2 Замените в ЧПУ печатную (прекратился сигнал ITP). плату интерфейса шпинделя.
54 Измените состояние нагрузки. Обнаруженаперегрузкапо току.
Проверьте состояние дейст-
Замените печатную плату уп-
Замените печатную плату уп-

G. СПИСОК СИГНАЛОВ ТРЕВОГИ
9079 SPN_n_ : INITIAL TEST ERROR (ШПИНДЕЛЬ _n_ : ОШИБКА ПЕРВОНАЧАЛЬНОГО ТЕСТИРОВАНИЯ)
9081 SPN_n_ : 1-ROT MOTOR SENSOR ERROR (ШПИНДЕЛЬ _n_ : ОШИБКА ДАТЧИКА 1 ОБОРОТА МОТОРА)
9082 SPN_n_ : NO 1-ROT MOTOR SENSOR (ШПИНДЕЛЬ _n_ : ОТСУТСТВИЕ СИГНАЛА ДАТЧИКА 1 ОБОРОТА МОТОРА)
9083 SPN_n_ : MOTOR SENSOR SIGNAL ERROR (ШПИНДЕЛЬ _n_ : ОШИБКА СИГНАЛА ДАТЧИКА МОТОРА)
79 Замените печатную плату При операции первонауправления SVPM. чального тестировании
81 1 Проверьте и исправьте паНельзя безошибочно обраметр. наружить сигнал одного 2 Замените кабель обратной оборота датчика мотора.
B1 Замените печатную плату упНизкое напряжение питаравления SVPM. ния управления конвер-

G. СПИСОК СИГНАЛОВ ТРЕВОГИ
Коды ошибок (последовательный шпиндель)
SVPM показывает код ошибки в качестве 2 — х значного числа в STATUS1 при горящем желтом светодиоде. Коды ошибки появляются в данных диагностики ЧПУ ном. 712.
Когда горит красный светодиод, SVPM показывает номер сигнала тревоги, создаваемого серийным шпинделем, что означает отличное от того, что означает горящий желтый светодиод.
→ См. “Сигналы тревоги (последовательный шпиндель).”
Обнаружение неисправности и способ
01 Когда не вводится ни *ESP (сигнал Проверьте последовательности *ESP и MRDY. Для аварийного останова; имеется два типа MRDY обратите внимание на установку параметра сигналов: сигнал ввода и сигнал контакта относительно использования сигнала MRDY (бит 0 SVPM (*2)), ни MRDY (сигнал готовности параметра ном. 4001).
станка), вводятся SFR (команда вращения вперед), SRV (команда обратноговращения) или ORCM (команда ориентирования).
Когда установки параметра произведены
Проверьте установки параметров.
так, чтобы не использовать датчик поло-
жения, что означает, что регулирование по
положению не исполняется (биты 3, 2, 1, 0
параметра ном. 4002 = 0, 0, 0, 0), вводится
команда управления контуром Cs. В этом
случае мотор не возбуждается.
Когда установки параметров производятся
Проверьте установки параметров.
так, чтобы не использовать датчик положения, чтоозначает, чторегулирование поположениюневыполняется(биты3, 2, 1, 0 параметра ном. 4002 = 0, 0, 0, 0), вводится команда режима сервосистемы (такого, как жесткое нарезание резьбы или позиционирование шпинделя) или команда управления синхронизацией шпинделя. В этом случае мотор не возбуждается.
05 Если параметр опции не установлен для Проверьте установки параметра для функции функции ориентирования, вводится ORCM ориентирования.
Если функция управления переключением Проверьте сигнал состояния силовой линии (RCH).
вывода не используется, выбрано вращение
с низкой скоростью (RCH = 1).
07 Если вводится команда управления конПроверьте последовательность. туром Cs, SFR (команда вращения вперед)
или SRV (команда обратного вращения) не вводятся.

G. СПИСОК СИГНАЛОВ ТРЕВОГИ
Обнаружение неисправности и способ
08 Если вводится команда управления режиПроверьте последовательность. мом сервосистемы (такого, как жесткое нарезание резьбы или позиционирование
шпинделя), SFR (команда вращения вперед) или SRV (команда обратного вращения) не вводятся.
09 Если вводится команда управления синхПроверьте последовательность. ронизацией шпинделя, SFR (команда
вращения вперед) или SRV (команда обратного вращения) не вводятся.
Если вводится команда управления
Во время выполнения команды управления конту-
контуромCs, задаетсядругой режим(режим
ром Cs не задавайте другой режим. Перед вводом
сервосистемы, управление синхронизацией
другого режима отмените команду управления
шпинделя или ориентирование).
11 Если вводится команда режима сервоВо время выполнения команды режима сервосисистемы (такого, как жесткое нарезание стемынезадавайтедругойрежимоперации. Перед резьбы или позиционирование шпинделя), вводом другого режима отмените режим сервозадается другой режим (управление cсистемы.
контуром Cs, управление синхронизацией шпинделя или ориентирование).
Если вводится команда управления
Во время выполнения команды управления синх-
синхронизацией шпинделя, задается другой
ронизацией шпинделя не задавайте другой режим.
режим (управление контуром Cs, режим
Перед вводом другого режима отмените команду
сервосистемы или ориентирование).
управления синхронизацией шпинделя.
14 SFR (команда вращения вперед) и SRV Введите любую из команд. (команда обратного вращения) вводятся в
17 Установки параметра детектора скорости Проверьте установки параметров. (бит 2, 1 и 0 параметра ном. 4011) недействительны. Детектор скорости не соответствует установкам.
Когда установки параметра произведены
Проверьте установки параметра и сигнал ввода.
так, чтобы не использовать датчик поло-
жения, что означает, что регулирование по
положению не исполняется (биты 3, 2, 1, 0 параметра ном. 4002 = 0, 0, 0, 0), задается ориентирование по шифратору положения.
24 Для непрерывного индексирования при Проверьте INCMD (команда приращения). До ориентировании по шифратору сначала последовательного исполнения команд асболютвыполняется операция приращения (INCMD ного положения сначала должно быть выполнено
= 1), а затем вводится команда абсолютного ориентированиекомандыабсолютногоположения.
29 Установки параметра произведены для Нельзя использовать функцию ориентирования в использования функции ориентирования в кратчайшее время Используйте ориентирование
кратчайшеевремя(бит6 праметраном. 4018 обычным методом. = 0, параметры ном. 4320 — 4323 ( 0).
31 Данная конфигурация аппаратного обесПроверьте модель ЧПУ. печениянепозволяетиспользоватьфункцию
FAD шпинделя. В этом случае мотор не возбуждается.
Источник

-
Bookmarks
Quick Links
Summary of Contents for Fraser EX1250
-
Page 1
1250 EXHP… -
Page 2
Index Indice Index Indice Index Indice Index Indice Index Indice Index Indice Index Indi Page 3 Page 11 Seite 19… -
Page 3
EX1250 Static Eliminator Bar Operating Instructions Instructions/Booklet/EX1250 iss.11… -
Page 4
ATEX requirements of the hazardous area. The whole system has been tested and certified for use in hazardous areas — with the Bar and Cable inside the zoned area and the Power Unit outside of the zoned area. The certification details are: Instructions/Booklet/EX1250 iss.11… -
Page 5
The emitter pins should face the material to be neutralised. The bars must be dry and oil-free. The EX1250 Bar can neutralise static charge at a distance of up to 150mm. However, for the best performance it should be positioned closer: if possible 25 — 50mm from the product. At a distance of 150mm the performance is about 85% less that at 25mm. -
Page 6
Bar and cable are certified for positioning inside the hazardous area. Connecting the Static Eliminator Bars Make sure that the electrical supply is turned off before starting. • Remove plastic cap from threaded bush on power unit. • Push in cable connector Instructions/Booklet/EX1250 iss.11… -
Page 7
If there is a fault in the EX1250 Bar the Power Unit will shut down for safety reasons — it is current limited to 5mA. The electronic circuitry for the RFM is on a PCB mounted inside the power unit. It does not need any additional power source. -
Page 8
The cleaning chemical must be compatible with PVC and epoxy resin. When cleaning around the emitters — take care as the pins are sharp! Please note: the EX1250 and EXHP Bars have no user serviceable parts. The warranty will be void if the customer attempts to make repairs. -
Page 9
89/336/EEC ( Electromagnetic Compatibility (EMC) Directive) • EN61000-6-3 • EN55011-1-B 72/23/EEC (Low Voltage Equipment Directive) • EN60204-1 For further information, please contact the manufacturer: Fraser Anti-Static Techniques Ltd Tel: 44 (0) 1398-331114 Fax: 44 (0) 1398-331411 email: sales@fraser-antistatic.co.uk www.fraser-antistatic.co.uk Instructions/Booklet/EX1250 iss.11… -
Page 11: Instructions D’utilisation
Barre d’élimination d’électricité statique 1250 et unité d’alimentation EXHP Instructions d’utilisation Instructions/Booklet/EX1250 iss.10…
-
Page 12
Barre d’élimination d’électricité statique EX1250 et unité d’alimentation EXHP Instructions d’installation et de maintenance Il est important de lire et de comprendre ces instructions avant d’entreprendre l’installation ou d’utiliser cet équipement. L’installation électrique doit être exécutée par un électricien qualifié compétent. -
Page 13
La valeur du fusible est de 400 mA pour 230 V ou de 800mA pour 115 V. • Aucune modification ou réparation ne doit être exécutée par l’utilisateur – seule la société Fraser est habilitée à effectuer les réparations. Toute modification exécutée par l’utilisateur invalide la garantie et la certification ATEX. Mise en place de l’équipement Unité… -
Page 14
Les broches émettrices doivent être dirigées vers le matériau à neutraliser. Les barres doivent être sèches et dépourvues d’huile. La barre EX1250 peut neutraliser la charge statique à des distances pouvant aller jusqu’à 150 mm. Toutefois, pour obtenir les meilleures performances possibles, elle doit se trouver plus près, si possible de 25 à… -
Page 15
Isolation (contacts au bobinage) 4kV (essai aux ondes de choc) Charge nominale avec 230 V CA : 250VA Puissance de rupture CC : 3A à 30V, 0,35A à 110V, 0,2A à 220V Charge d’interruption minimale : 5mA à 10V Instructions/Booklet/EX1250 iss.11… -
Page 16
L’intensité du courant d’alimentation est limitée à 5 mA pour assurer la sécurité du dispositif. En cas de court-circuit dans l’une des barres, elle tentera d’absorber plus que 5 mA de courant. Lorsque cela se produit, l’unité d’alimentation s’éteint. Débrancher une barre à la fois pour découvrir la barre qui cause le problème. Instructions/Booklet/EX1250 iss.11… -
Page 17
Règlementation de 1994 sur l’équipement électrique (Sécurité). et qu’il est habilité à porter la marque CE. Pour un supplément d’informations, veuillez contacter le fabricant : Fraser Anti-Static Techniques Ltd Tel: 44 (0) 1398-331114 Fax: 44 (0) 1398-331411 email: sales@fraser-antistatic.co.uk www.fraser-antistatic.co.uk… -
Page 19
EX1250 Antistatikstab und EXHP Netzteil Betriebsanleitung Instructions/Booklet/EX1250 iss.11… -
Page 20
Prüfen Sie, dass die gelieferten Teile identisch mit den von Ihnen bestellten sind. Dokumentation / beiliegende Teile: Im Lieferumfang sind M4 x 20 mm Sechskantschrauben, 200 mm Montageband und eine Konformitätserklärung enthalten. Das Netzteil wird mit IEC-Anschluss ausgeliefert. Instructions/Booklet/EX1250 iss.11… -
Page 21
Der Sicherungswert beträgt 400 mA für 230V oder 800 mA für 115 V. Es dürfen keine Änderungen oder Reparaturen vom Anwender vorgenommen werden – Reparaturen sind nur von Fraser auszuführen. Jegliche Änderungen führen zu einem Erlöschen der Garantie und der ATEX Zertifizierung. -
Page 22
ATEX Zone zertifiziert Positionierung des Netzteils Wichtig: Das Netzteil muss außerhalb des ATEX Gefahrenbereichs positioniert werden. Nur Stab und Kabel sind für die Positionierung innerhalb des Gefahrenbereichs zertifiziert. Anschluss der Stäbe Vor Beginn sicherstellen, dass die Stromversorgung ausgeschaltet ist. Instructions/Booklet/EX1250 iss.11… -
Page 23
Kurzschluss in Stab oder Kabel Defekt im Netzteil zu reinigende Stäbe Bei Störungen im EX1250 Stab schaltet das Netzteil zur Sicherheit ab – die Stromstärke ist auf 5mA begrenzt. Die Elektronik für den Fernüberwachungsmonitor (RFM) befindet sich auf einer Leiterplatte im Netzgerät. -
Page 24
1. M12 5 Pin Anschluss: z.B. Lumberg RSC5/7 2. M12 5 Pin Anschluss mit 5m Kabel: z.B. Lumberg RST5/228 5m Hinweis: das Netzteil entspricht der Schutzart IP54 nur in verriegelter Stellung mit entsprechenden Gegenstücken. Möglichkeit für Fernüberwachungsmonitor für Netzteil auf Anfrage. Instructions/Booklet/EX1250 iss.11… -
Page 25
Beachten Sie bitte beim Umgang mit dem Gerät und bei seiner Reinigung, dass die Emitterspitzen scharf sind und Vorsicht erfordern. Weitere Anweisungen und Informationen erhalten Sie vom Hersteller: Fraser Anti-Static Techniques Ltd Tel: 44 (0) 1398-331114 Fax: 44 (0) 1398-331411 email: sales@fraser-antistatic.co.uk www.fraser-antistatic.co.uk… -
Page 27
The Fraser range of Static Control equipment includes the following: La gamme Fraser d’équipements de contrôle de l’électricité statique comprend les produits suivants: Das Produktprogramm von Fraser umfasst folgende Geräte: SHORT RANGE Static Neutralisation LONG RANGE Static Neutralisation Neutralisation statique COURTE DISTANCE… -
Page 28
For more information about static and a full range of our products, visit our website at: www.fraser-antistatic.co.uk Scotts Business Park, Bampton, Devon. EX16 9DN United Kingdom Tel: +44 (0) 1398 331114 Fax: +44 (0) 1398 331411 E: sales@fraser-antistatic.co.uk…
This manual is also suitable for:
Exhp