nagogam
![]()
New Member

- Total Posts : 19
- Reward points : 0
- Joined: 2017/12/02 11:02:35
- Location: Switzerland
- Status: offline

Hello,
I am using:
1. custom board based on a pic32mx470f512l,
2. a bit modified uart driver generated by the MCC utility
A get the following message:
_general _exception_handler: Data bus error; excep_addr 0xe4
I have a packet parser working on an UART interrupt, here is a code extract showing the final stage of a packet construction:
queue_message_t message;
message.uart_id = uart_id;
memcpy(&message.raw_data[0], &rx_buffer[0], sizeof(full_status_pkt_t));circular_buffer_put(cbuf, &message);
#ifdef ENABLE_PRINTF_MAX_Q_ELEMENT
static size_t max_nb_Q_el = 0;size_t cur_nb_Q_el;
cur_nb_Q_el = cbuf_get_nb_elements(cbuf);
if (cur_nb_Q_el > max_nb_Q_el)
{
max_nb_Q_el = cur_nb_Q_el;
// DLOG("##### %xn", max_nb_Q_el);
}
#endif}
*parse_state = PARSE_COMMAND_ID;
break;
}
After the break statement the program goes straight into the UART interruption, here is a code’s extract:
/**
Maintains the driver's transmitter/receiver/error state machine and implements its ISR
*/
void __ISR(_UART_3_VECTOR, IPL6AUTO) _UART_3(void)
{
if(IFS1bits.U3RXIF)
{
int count = 0;while((count < UART3_RX_FIFO_LENGTH) && (U3STAbits.URXDA == 1))
{
count++;*uart3_obj.rxTail = U3RXREG;
uart3_obj.rxTail++;
if(uart3_obj.rxTail == (uart3_rxByteQ + UART3_CONFIG_RX_BYTEQ_LENGTH))
{
uart3_obj.rxTail = uart3_rxByteQ;
}uart3_obj.rxStatus.s.empty = false;
if(uart3_obj.rxTail == uart3_obj.rxHead)
{
//Sets the flag RX full
uart3_obj.rxStatus.s.full = true;
break;
}
uart3_rx_ev_handler(UART3_Read(), 0);
}/*
* Fails here
*/
IFS1CLR= 1 << _IFS1_U3RXIF_POSITION;
}
else if (IFS2bits.U3TXIF)
I put a comment before the line after which the program goes into exception. The exception code I’ve seen is 0xe4 or 0x44 depending on my printfs. More interesting, when I enable the define ENABLE_PRINTF_MAX_Q_ELEMENT in the parser, everything is fine, no exception, the program is stable. I tried to replace this define by a delay but couldn’t get the same result…
Does anybody know how to debug a situation like this?
Thank you.
nagogam
![]()
New Member
- Total Posts : 19
- Reward points : 0
- Joined: 2017/12/02 11:02:35
- Location: Switzerland
- Status: offline
Re: How to find the cause of a Data bus error?
2019/02/11 06:32:39
(permalink)
Found. It’s a buffer overflow issue. The structure full_status_pkt_t has been growing over time and finally became bigger that a circular buffer cell size. Depending on what was after the memcpy function the problem appeared or not.
However, could anyone explain why I got the Data Bus Error exception? I don’t quite understand in which cases a program get here. And what can be found at the addresses like 0xe4?
Nikolay_Po

Super Member

- Total Posts : 1963
- Reward points : 0
- Joined: 2012/04/01 13:49:27
- Location: Russia, Novorossiysk
- Status: offline
Re: How to find the cause of a Data bus error?
2019/02/11 07:03:15
(permalink)
Bus error encountering when addresses generated beyond physically implemented memory. That is the definition of bus error. May be the buffer was allocated at the edge of memory region and an overflow have accessed an address beyond current allowable region?
Jim Nickerson

User 452
- Total Posts : 7188
- Reward points : 0
- Joined: 2003/11/07 12:35:10
- Location: San Diego, CA
- Status: offline
Re: How to find the cause of a Data bus error?
2019/02/11 08:28:14
(permalink)
On my PC there is an example of writing a general exception handler in
C:Program Files (x86)Microchipxc32v2.15examplesxc32_exampleshandling_exceptions
andersm
![]()
Super Member
- Total Posts : 3080
- Reward points : 0
- Joined: 2012/10/07 14:57:44
- Location: 0
- Status: offline
Re: How to find the cause of a Data bus error?
2019/02/11 09:27:24
(permalink)
Your buffer overflow likely wrote over a pointer stored in RAM, making it point to an unmapped memory region. When your program tried dereferencing the pointer, it triggered the exception.
MPaulHolmes
![]()
Junior Member

- Total Posts : 98
- Reward points : 0
- Joined: 2009/10/31 10:52:40
- Location: 0
- Status: offline
Re: How to find the cause of a Data bus error?
2020/02/07 22:31:12
(permalink)
I’m also getting a data bus error with the PIC32MK (using the free xc32). In my case, I have an interrupt updating at around 5KHz, and it’s modifying a variable like this:
void __attribute__((interrupt(IPL3SRS), at_vector(_PWM1_VECTOR), aligned(16))) PWM1Interrupt (void) {
PWMCON1CLR = 0b11111000000000001100000000000000; // clear all of the stupid flags.
IFS5CLR = _IFS5_PWM1IF_MASK; // this can only be cleared after clearing the PWMCON1 interrupt flags
pwmCounter++;
if (pwmCounter > 10000) {
if (O_PORT_LED == 0) O_LAT_LED = 1;
else O_LAT_LED = 0;
pwmCounter = 0;
}
And in the while(1) loop in main:
while (1) {
x = pwmCounter;
}
If I don’t include the line «x = pwmCounter;», the code runs. If I add that line, I get a data bus error. Does anyone have any ideas what is going on?
If I set optimization to 1, the problem goes away. My goodness…
post edited by MPaulHolmes — 2020/02/07 23:10:56
andersm
![]()
Super Member
- Total Posts : 3080
- Reward points : 0
- Joined: 2012/10/07 14:57:44
- Location: 0
- Status: offline
Re: How to find the cause of a Data bus error?
2020/02/08 04:42:00
(permalink)
That is not enough context to be able to say anything. Can you provide a complete (ie. something that compiles and runs) testcase?
MPaulHolmes
![]()
Junior Member
- Total Posts : 98
- Reward points : 0
- Joined: 2009/10/31 10:52:40
- Location: 0
- Status: offline
Re: How to find the cause of a Data bus error?
2020/02/08 08:50:22
(permalink)
I had to modify it so it wouldn’t be freakishly long, and changed the interrupt to TMR3 interrupt, but I can still get an exception here, so I thought the reasons may be related.
Optimization level is 0, xc32 compiler, pic32mk0512mcf100 microcontroller. I just wanted to add that this forum is an amazing resource, and I am very grateful for everyone’s willingness to offer their expertise.
#pragma config USERID = 0xFFFF // Enter Hexadecimal value (Enter Hexadecimal value)
#pragma config PWMLOCK = OFF // PWM IOxCON lock (PWM IOxCON register writes accesses are not locked or protected)
#pragma config FUSBIDIO2 = 0//OFF // USB2 USBID Selection (USBID pin is controlled by the port function)
#pragma config FVBUSIO2 = 0//OFF // USB2 VBUSON Selection bit (VBUSON pin is controlled by the port function)
#pragma config PGL1WAY = OFF // Permission Group Lock One Way Configuration bit (Allow multiple reconfigurations)
#pragma config PMDL1WAY = OFF // Peripheral Module Disable Configuration (Allow multiple reconfigurations)
#pragma config IOL1WAY = OFF // Peripheral Pin Select Configuration (Allow multiple reconfigurations)
#pragma config FUSBIDIO1 = 0//OFF // USB1 USBID Selection (USBID pin is controlled by the port function)
#pragma config FVBUSIO1 = 0//OFF // USB2 VBUSON Selection bit (VBUSON pin is controlled by the port function)// DEVCFG2
#pragma config FPLLIDIV = DIV_1 // System PLL Input Divider (1x Divider)
#pragma config FPLLRNG = RANGE_8_16_MHZ // System PLL Input Range (8-16 MHz Input)
#pragma config FPLLICLK = PLL_POSC//1==FRC. PLL_POSC // System PLL Input Clock Selection (POSC is input to the System PLL)
#pragma config FPLLMULT = MUL_60 // System PLL Multiplier (PLL Multiply by 60)
#pragma config FPLLODIV = DIV_4 //DIV_4 // System PLL Output Clock Divider (4x Divider)
#pragma config VBATBOREN = OFF // VBAT BOR Enable (Disable ZPBOR during VBAT Mode)
#pragma config DSBOREN = OFF // Deep Sleep BOR Enable (Disable ZPBOR during Deep Sleep Mode)
#pragma config DSWDTPS = DSPS32 // Deep Sleep Watchdog Timer Postscaler (1:2^36)
#pragma config DSWDTOSC = LPRC // Deep Sleep WDT Reference Clock Selection (Select LPRC as DSWDT Reference clock)
#pragma config DSWDTEN = OFF // Deep Sleep Watchdog Timer Enable (Disable DSWDT during Deep Sleep Mode)
#pragma config FDSEN = OFF // Deep Sleep Enable (Disable DSEN bit in DSCON)
#pragma config BORSEL = 0//LOW // Brown-out trip voltage (BOR trip voltage 2.8v (OPAMP deviced operation))
#pragma config UPLLEN = 1//OFF==1 // USB PLL Enable (USB PLL Disabled)// DEVCFG1
#pragma config FNOSC = SPLL//FRC//0b101//SPLL//FRC //POSC // Oscillator Selection Bits (Primary Osc (HS,EC))
#pragma config DMTINTV = WIN_127_128 // DMT Count Window Interval (Window/Interval value is 127/128 counter value)
#pragma config FSOSCEN = OFF // Secondary Oscillator Enable (Disable Secondary Oscillator)
#pragma config IESO = OFF // Internal/External Switch Over (Disabled)
#pragma config POSCMOD = HS//0b11//POSC IS DISABLED. HS // Primary Oscillator Configuration (HS osc mode)
#pragma config OSCIOFNC = OFF // CLKO Output Signal Active on the OSCO Pin (Disabled)
#pragma config FCKSM = CSDCMD // Clock Switching and Monitor Selection (Clock Switch Disabled, FSCM Disabled)
#pragma config WDTPS = PS1048576 // Watchdog Timer Postscaler (1:1048576)
#pragma config WDTSPGM = STOP // Watchdog Timer Stop During Flash Programming (WDT stops during Flash programming)
#pragma config WINDIS = NORMAL // Watchdog Timer Window Mode (Watchdog Timer is in non-Window mode)
#pragma config FWDTEN = OFF // Watchdog Timer Enable (WDT Disabled)
#pragma config FWDTWINSZ = WINSZ_25 // Watchdog Timer Window Size (Window size is 25%)
#pragma config DMTCNT = DMT31 // Deadman Timer Count Selection (2^31 (2147483648))
#pragma config FDMTEN = OFF // Deadman Timer Enable (Deadman Timer is disabled)// DEVCFG0
#pragma config DEBUG = OFF //0 means enable debug // Background Debugger Enable (Debugger is disabled)
#pragma config JTAGEN = OFF // JTAG Enable (JTAG Disabled)
#pragma config ICESEL = ICS_PGx2 // ICE/ICD Comm Channel Select (Communicate on PGEC2/PGED2)
#pragma config TRCEN = OFF // Trace Enable (Trace features in the CPU are disabled)
#pragma config BOOTISA = MIPS32 // Boot ISA Selection (Boot code and Exception code is MIPS32)
#pragma config FSLEEP = OFF // Flash Sleep Mode (Flash is powered down when the device is in Sleep mode)
#pragma config DBGPER = PG_ALL // Debug Mode CPU Access Permission (Allow CPU access to all permission regions)
#pragma config SMCLR = MCLR_NORM // Soft Master Clear Enable (MCLR pin generates a normal system Reset)
#pragma config SOSCGAIN = GAIN_2X // Secondary Oscillator Gain Control bits (2x gain setting)
#pragma config SOSCBOOST = ON // Secondary Oscillator Boost Kick Start Enable bit (Boost the kick start of the oscillator)
#pragma config POSCGAIN = GAIN_LEVEL_3 // GAIN LEVEL 0 TO 3 SEEM TO ALL WORK. GAIN_LEVEL_3 // Primary Oscillator Gain Control bits (Gain Level 3 (highest))
#pragma config POSCBOOST = ON//OFF // If this is off, production programming won't work without the pickit 3 plugged in. Primary Oscillator Boost Kick Start Enable bit (Boost the kick start of the oscillator)
#pragma config EJTAGBEN = NORMAL // EJTAG Boot Enable (Normal EJTAG functionality)// DEVCP
#pragma config CP = OFF // Code Protect (Protection Disabled)// SEQ
#pragma config TSEQ = 0//0xFFFF // Boot Flash True Sequence Number (Enter Hexadecimal value)
#pragma config CSEQ = 0x0FFFF // Boot Flash Complement Sequence Number (Enter Hexadecimal value)#include "p32mk0512mcf100.h"
volatile unsigned int timer3Counter = 0, whileCounter = 0;
void __attribute__((interrupt(IPL3SRS), at_vector(_TIMER_3_VECTOR), aligned(16))) Timer3Interrupt (void);
void Delay_ms(unsigned int _delay);
void InitTimers();int main() {
__builtin_mtc0(16, 0,(__builtin_mfc0(16, 0) | 0x3));
CHECONbits.PFMWS = 3;
INTCONSET = _INTCON_MVEC_MASK;
//PRISSSET = _PRISS_PRI4SS_MASK; // interrupts with priority 4 use shadow set 1.
__builtin_enable_interrupts();
InitTimers();while (1) {
whileCounter++;
Delay_ms(2);
}
return 1;
}
void __attribute__((interrupt(IPL3SRS), at_vector(_TIMER_3_VECTOR), aligned(16))) Timer3Interrupt (void) {
//IFS2bits.T7IF = 0;
IFS0CLR = _IFS0_T3IF_MASK;timer3Counter++;
if ((timer3Counter & 8191) == 8191) {
asm("nop;nop;");
}
asm("nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;");
asm("nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;nop;");
}
void Delay_ms(unsigned int _delay) { // not much more than 65535 for delay. Otherwise we will have 32 bit overflow.
static unsigned int _startTime = 0;
static unsigned int _i = 0;
// _CP0_GET_COUNT() is a 60MHz clock.
// 1ms is 1/60,000,000 * 60,000.
_startTime = TMR7;
_i = 60000*_delay;
while (TMR7 - _startTime < _i) {} // delay the required number of ms.
}
void InitTimers() {
T3CONbits.T32 = 1; // 32 bit mode enabled.
T7CONbits.T32 = 1; // 32 bit mode enabled.
PR3 = 12000-1; // The interrupt should run at 10khz.
T3CONbits.TCKPS = 0b0; // prescaler = 1. So, the timer runs at 60,000,000 Hz. (PB5 clock but with prescaler of 1)
T7CONbits.TCKPS = 0b0;
IPC3bits.T3IP = 3;
IPC3bits.T3IS = 3;
IFS0bits.T3IF = 0;
IEC0bits.T3IE = 1;
T3CONbits.ON = 1;
T7CONbits.ON = 1;
}
post edited by MPaulHolmes — 2020/02/08 10:14:28
MPaulHolmes
![]()
Junior Member
- Total Posts : 98
- Reward points : 0
- Joined: 2009/10/31 10:52:40
- Location: 0
- Status: offline
Re: How to find the cause of a Data bus error?
2020/02/08 08:50:23
(permalink)
double post on accident, so I deleted it. I don’t know how to remove a post completely.
andersm
![]()
Super Member
- Total Posts : 3080
- Reward points : 0
- Joined: 2012/10/07 14:57:44
- Location: 0
- Status: offline
Re: How to find the cause of a Data bus error?
2020/02/08 09:59:35
(permalink)
The initialization of the PRISS register doesn’t match your register set usage.
PRISSSET = _PRISS_PRI4SS_MASK; // interrupts with priority 4 use shadow set 1.void __attribute__((interrupt(IPL3SRS), at_vector(_TIMER_3_VECTOR), aligned(16))) Timer3Interrupt (void)
The comment is also not correct, _PRISS_PRI4SS_MASK will set the reserved value 0xF for priority 4. For the PIC32MK, the valid values are 0 and 1.
As a sidenote, on a device with two register sets, it doesn’t really make sense to allocate the second register set to anything except the highest priority interrupts.
MPaulHolmes
![]()
Junior Member
- Total Posts : 98
- Reward points : 0
- Joined: 2009/10/31 10:52:40
- Location: 0
- Status: offline
Re: How to find the cause of a Data bus error?
2020/02/08 10:13:34
(permalink)
Oh, so it should be:
PRISSET = (1 << 16);
That was actually a hold-over from the larger program, but if I comment it out, since I’m not using priority 4 level in this mini-code, it still does the exception. I commented out the prisset line in the code above. As it is with the commented out prisset, there’s still an exception.
post edited by MPaulHolmes — 2020/02/08 10:15:51
andersm
![]()
Super Member
- Total Posts : 3080
- Reward points : 0
- Joined: 2012/10/07 14:57:44
- Location: 0
- Status: offline
Re: How to find the cause of a Data bus error?
2020/02/08 10:31:57
(permalink)
No, it should be
PRISS = (1U << 12);
If your ISR says it’s using shadow registers at priority 3, then the PRISS setting for priority 3 better match that claim.
MPaulHolmes
![]()
Junior Member
- Total Posts : 98
- Reward points : 0
- Joined: 2009/10/31 10:52:40
- Location: 0
- Status: offline
Re: How to find the cause of a Data bus error?
2020/02/08 10:44:37
(permalink)
I think we had a misunderstanding. I meant PRISSET = (1 << 16) sets up interrupts with priority 4 to shadow set 1, and the default for everything is shadow set 0, but since I am not using any interrupts with priority 4 in this mini-project, I just commented it out. The timer interrupt is priority 3. But the sub-priority is 3. Does that make it sort of priority 4, since it’s greater than 3 (sort of)?
But here’s an interesting thing. I set interrupts with priority 3 to use shadow set 1, and now there’s no exception, but there IS an exception when I just use the default of shadow set 0. Does the «IPL3SRS» in:
void __attribute__((interrupt(IPL3SRS), at_vector(_TIMER_3_VECTOR), aligned(16))) Timer3Interrupt (void);
Mean that I HAVE TO use shadow set 1 for interrupts with priority 3?
post edited by MPaulHolmes — 2020/02/08 10:48:58
andersm
![]()
Super Member
- Total Posts : 3080
- Reward points : 0
- Joined: 2012/10/07 14:57:44
- Location: 0
- Status: offline
Re: How to find the cause of a Data bus error?
2020/02/08 10:57:41
(permalink)
Shadow set 0 is what your non-interrupt code is using. When the data sheet says there are «Two 32-bit code register files», that means there are two sets in total, not two additional sets for use by interrupts. So when your ISR is set to IPL3SRS, and IPL3 is configured to use shadow set 0 in PRISS, the interrupt handler will trash the execution context for anything else using the same shadow register set.
The «SRS» interrupt attribute is a directive to the compiler that it doesn’t have to generate code for saving the general-purpose registers on stack. It does not change the behaviour of the hardware in any way. When an interrupt triggers, the CPU will switch to the register set configured for that interrupt’s priority level in the PRISS register.
Edit:
MPaulHolmesThe timer interrupt is priority 3. But the sub-priority is 3. Does that make it sort of priority 4, since it’s greater than 3 (sort of)?
No. An interrupt with a higher priority (group priority level) can pre-empt one with a lower priority. If two interrupts with the same priority are pending at the same time, the one with the highest sub-priority will be serviced first. As a final tie-breaker, the interrupt number is used, with the lowest number having the highest «natural» priority. See section 8.7 in the family reference manual.
post edited by andersm — 2020/02/08 11:03:54
MPaulHolmes
![]()
Junior Member
- Total Posts : 98
- Reward points : 0
- Joined: 2009/10/31 10:52:40
- Location: 0
- Status: offline
Re: How to find the cause of a Data bus error?
2020/02/08 10:59:41
(permalink)
Mind Grenade!!!!
I did not realize this! Thank you sir!
- Печать
Страницы: [1] Вниз

Тема: Bus error (решено) (Прочитано 8545 раз)
0 Пользователей и 1 Гость просматривают эту тему.

Belyaev Nikolay

Привет всем.
Проблема такая. запуская apache2 и… тут же вылетает ошибка Bus error. Логов не создаётся. Причём программу я удалил (через purge и удалил всё что было в /etc/apache2 ) и просто случайно запустил и опять Bus error. Перед этим была проблема с диском — «слишком много ошибок» и делал проверку вручную 1.3% от всего что находится в / было исправлено  Ошибка похоже не в apache, а в системе в принципе. чего делать?
Ошибка похоже не в apache, а в системе в принципе. чего делать? 
« Последнее редактирование: 19 Декабря 2008, 09:44:22 от Belyaev Nikolay »
«Сначала они вас игнорируют, потом смеются над вами, потом борются с вами, а потом вы побеждаете»
Махатма Ганди
digiwhite
А более подробного текста ошибки нету?
Belyaev Nikolay
в том-то и беда 
я просто не понимаю почему не удалился полностью apache…
« Последнее редактирование: 18 Декабря 2008, 17:35:29 от Belyaev Nikolay »
«Сначала они вас игнорируют, потом смеются над вами, потом борются с вами, а потом вы побеждаете»
Махатма Ганди
digiwhite
Так, а что вы случайно запустили снова после удаления apache?
Belyaev Nikolay
apache2
причём от пользователя…
и тутже получил ошибку Bus Error
«Сначала они вас игнорируют, потом смеются над вами, потом борются с вами, а потом вы побеждаете»
Махатма Ганди
axe
Bus error — это какая-то глобальная ошибка? Software или hardware? Линукс жив остается? каким образом она «возникает»?
Belyaev Nikolay
пока заметил её только при работе с apache. в логах (смотрю файлы на изменение в /var/log) НИГДЕ ничего не добавляется. пробовал запускать апач с максимальным выводом ошибок, тоже ничего.
—
через 25 мин
попытался обновиться с 8.04 до 8.10
хотел скинуть инфу на другой комп, вызвал smbclient и опять bus error… ппц точняк потёрло что-н.
Кстати причина сбоя я обнаружил надеюсь это тольк она. Память не прошла memtest, переставил модули в другие слота всё ок.
сейчас идёт обновление. надеюсь поможет
« Последнее редактирование: 19 Декабря 2008, 08:58:39 от Belyaev Nikolay »
«Сначала они вас игнорируют, потом смеются над вами, потом борются с вами, а потом вы побеждаете»
Махатма Ганди
digiwhite
Belyaev Nikolay
нет похоже проблемы с материнкой. но пока денежек на замену не дают
переставил в другие разьёмы всё ок
«Сначала они вас игнорируют, потом смеются над вами, потом борются с вами, а потом вы побеждаете»
Махатма Ганди
Belyaev Nikolay
всё. обновился. и всё нормуль
похоже действительно память мне реально подпортила инфу на жёстком диске
вопрос, хотя он из области «чтобы было бы», но всё равно инетресно
Сейчас я обновился и переустановил все пакеты. А что бы надо было делать, если не было возможности обновиться? удалить какой-н глобальный переустановить какой-н глобальный пакет… но какой?
«Сначала они вас игнорируют, потом смеются над вами, потом борются с вами, а потом вы побеждаете»
Махатма Ганди
- Печать
Страницы: [1] Вверх
Catalyst 6000/6500 Устранение неисправностей, связанных с системными сбоями — Часть 4
Сбои, связанные с модулем MSFC
Система получает исключение, связанное с ошибкой шины
Может произойти сбой платы MSFC с исключением ошибки шины, которое может возникнуть по причине как программной, так и аппаратной проблемы. Могут присутствовать следующие сообщения об ошибках:
-
На консоли:
*** System received a Bus Error exception *** signal= 0xa, code= 0x10, context= 0x60ef02f0 PC = 0x601d22f8, Cause = 0x2420, Status Reg = 0x34008002
-
В выходных данных команды show version:
!--- Output is suppressed. System was restarted by bus error at PC 0x0, address 0x0 at 15:31:54 EST Wed Mar 29 2000 !--- Output is suppressed.
Если указанный адрес является недействительным и находится вне диапазона памяти, это означает наличие ошибки в программном обеспечении. Если адрес находится в допустимом диапазоне, причина возникновения проблемы может заключаться в аппаратном сбое памяти процессора.
За дополнительной информацией о сбоях, связанных с ошибками шины, обратитесь к документу Устранение сбоев из-за ошибок шины. Дополнительные сведения см. в описании идентификатора ошибки Cisco ID CSCdx92013.
Система получает исключение, связанное с контролем четности кэш-памяти
Плата MSFC не предусматривает защиту памяти на основе кода исправления ошибок. Таким образом, обнаружение ошибки приводит к аварийному завершению работы платы MSFC. Ниже приведены некоторые из ошибок, возникающие в результате:
-
На консоли отображается:
*** System received a Cache Parity Exception *** signal= 0x14, code= 0xa405c428, context= 0x60dd1ee0 PC = 0x6025b2a8, Cause = 0x6420, Status Reg = 0x34008002
-
В выходных данных команды show version отображается:
!--- Output is suppressed. System returned to ROM by processor memory parity error at PC 0x6020F4D0, address 0x0 at 18:18:31 UTC Wed Aug 22 2001 !--- Output is suppressed.
Файл crashinfo, записанный в загрузочной флэш-памяти или на консоли, содержит следующее:
Error: primary data cache, fields: data, SysAD virtual addr 0x4B288202, physical addr(21:3) 0x288200, vAddr(14:12) 0x0000 virtual address corresponds to pcimem, cache word 0 Address: 0x4B288200 not in L1 Cache Address: 0x4B288202 Can not be loaded into L1 Cache
При возникновении ошибки более одного раза плату MSFC необходимо заменить. Однократное возникновение ошибки можно рассматривать как следствие случайного возмущения. В этом случае необходимо установить наблюдение за платой MSFC. Дополнительную информацию об ошибках четности см. в документе Ошибки четности памяти процессора (PMPE).
Прочие ошибки, связанные с контролем четности
Плата MSFC2 предусматривает защиту памяти на основе кода ECC. Тем не менее, существуют области памяти, в которых проверить четность возможно, но исправить одноразрядные ошибки не удается. Ниже представлены некоторые сообщения об ошибках, отображаемые в файле crashinfo и указывающие на ошибку четности:
-
MISTRAL_TM_DATA_PAR_ERR_REG_MASK_HI: 42
-
Error condition detected: TM_NPP_PARITY_ERROR
-
Error condition detected: SYSAD_PARITY_ERROR
-
Error condition detected: SYSDRAM_PARITY
Однократное возникновение сообщений об ошибках следует рассматривать как следствие случайного возмущения. Необходимо установить наблюдение за платой MSFC2. При более частом возникновении ошибок плату MSFC2 необходимо заменить. Дополнительную информацию об ошибках четности см. в документе Ошибки четности памяти процессора (PMPE.
%MISTRAL-3-ERROR
При наличии файла crashinfo на загрузочном устройстве флэш-памяти после возникновения аварийного отказа необходимо выполнить команду more bootflash:crashinfo_filename. Команда отображает информацию файла crashinfo. Если в начале журнала crashinfo присутствует сообщение об ошибке MISTRAL-3-ERROR, то необходимо определить, имела ли место одна из наиболее распространенных причин. Для этого обратитесь к разделу ИТ аутсорсинг.
Общий порядок диагностики для коммутаторов под управлением CatOS
Санитарная проверка в коде CatOS
Команда show system sanity запускает набор предопределенных проверок конфигурации с возможным сочетанием нескольких состояний системы для составления списка ситуаций, представляющих угрозу. Проверки предназначены для поиска всех вероятных несоответствий. Проверки также предназначены для поддержания системы необходимой корректной настройки системы и ее исправной работы. Эта команда поддерживается в CatOS версии 8.3x или выше.
Список выполняемых проверок и образец выходных данных команды приведены в разделе Санитарная проверка неполадок в настройках и общего состояния системы.
Восстановление коммутаторов Catalyst при сбое во время первоначальной загрузки CatOS
Восстановление коммутаторов Cisco Catalyst 6000/6500 с модулем управления Supervisor Engine 1 или 2 описано в разделе Восстановление Catalyst 6500/6000 с модулем управления Supervisor Engine I или II.
Восстановление коммутатора Cisco Catalyst 6000/6500 с модулем управления Supervisor Engine 720 или 32 описано в разделе Восстановление коммутатора Cisco Catalyst 6000/6500 с модулем управления Supervisor Engine 720 или 32.
Извлечение информации из файла Crashinfo
Файл crashinfo содержит коллекцию важных сведений о текущем сбое, сохраненных во флэш-памяти или загрузочной флэш-памяти. Если маршрутизатор дает сбой из-за повреждения данных или стека, для отладки этого типа сбоев нужно больше сведений о перезагрузке, чем просто выходные данные обычной команды show stacks.
В файле сведений об аварийном отказе содержатся следующие сведения:
-
ограниченное сообщение об ошибке (журнал) и история команд;
-
описание образа, работавшего в момент сбоя;
-
выходные данные команды show alignment;
-
трассировка операций выделения-освобождения памяти (malloc/free);
-
трассировка стека на уровне процессов;
-
контекст на уровне процесса;
-
дамп стека на уровне процесса;
-
дамп стека на уровне прерывания;
-
сведения об уровне процесса;
-
дамп памяти регистров на уровне процесса.
Порядок получения файла crashinfo и дополнительные сведения приведены в документе Извлечение информации из файла Crashinfo.
07.02.2019
Просмотров: 2031
Синий экран смерти 0x0000002E: DATA_BUS_ERROR возникает как на Windows 7, так и на других сборках операционной системы Microsoft. Это достаточно сложный BSOD, так как его причинами чаще всего становятся физические повреждение аппаратных компонентов ПК. Выделяют несколько факторов, которые вызывают синий экран смерти DATA BUS ERROR: повреждение оперативной памяти и жесткого диска, отсутствие драйверов для видеокарты и выход из строя самого видеоадаптера, несовместимость подключенных компонентов с ОС и материнской платой, наличие микротрещин на материнской плате. Поэтому ошибка 0x0000002E решается только методом тщательной программной диагностики системы и подключенных компонентов, а также визуальным осмотром сборки на предмет физического повреждения.
Читайте также: Синий экран смерти с кодом ошибки 0x000000ED
Способы решение ошибки 0x0000002E: DATA_BUS_ERROR
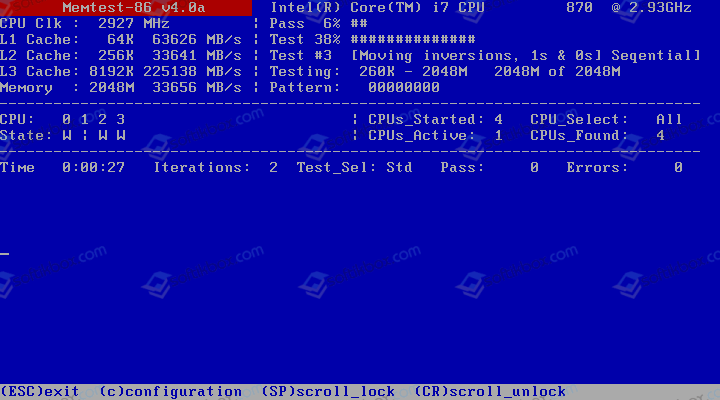
Самой распространенной причиной возникновения ошибки 0x0000002E: DATA_BUS_ERROR является отказавшая оперативная память. Чтобы определить, является ли ОЗУ реально виновником проблемы или BSOD вызывает другая неисправность, стоит скачать и записать на флешку программу MemTest86. В BIOS-е нужно выставить в настройках приоритет загрузки с внешнего носителя, так как проверка оперативной памяти должна выполняться в обход операционной системы. Запускаем проверку.
Если программа не обнаружила ошибок, то нужно выключить ПК, отсоединить кабель от розетки, открыть боковую крышку системного блока, нажать на кнопку включения (нужно, чтобы снять остатки заряда с конденсаторов). Теперь по бокам нажимаем на защелки, чтобы вынуть планки.

Теперь запускаем ПК без оперативки вообще, чтобы прошел пост. ПК будет ругаться, что нет памяти. Выключаем его аварийно. Теперь ставим в первый слот одну из планок. Запускаем ПК. Немного тестируем на предмет ошибки. Выключаем, повторяем все те же действия, что и при первом выключении (не забываем обесточить). Ставим эту же планку, только в другой слот. Вновь тестируем. Затем повторяем все то же, только с другим модулем. Напоследок запускаем планки в паре. Возможно, если вам повезет, то будет определено, что произошел банальный сбой. Однако может так случиться, что придётся подбирать новый набор планок ОЗУ или купить одну, но более емкую планку.
ВАЖНО! Если вы выполняли разгон оперативной памяти и после изменений в настройках Windows и BIOS начала появляться ошибка 0x0000002E: DATA_BUS_ERROR, то нужно сбросить настройки BIOS и системы до начальных.
Также неполадка 0x0000002E DATA_BUS_ERROR может появляться из-за повреждения жесткого диска и файловой системы. Для этого рекомендуем выполнить некоторые действия, которые мы опишем в той очередности, в которой они должны выполняться:
- Выключаем ПК. Обесточиваем материнскую плату. Открываем боковую крышку системного блока. Отключаем все кабели и шлейфы от жесткого диска. Визуально осматриваем кабели на предмет повреждений. Подключаем их обратно.

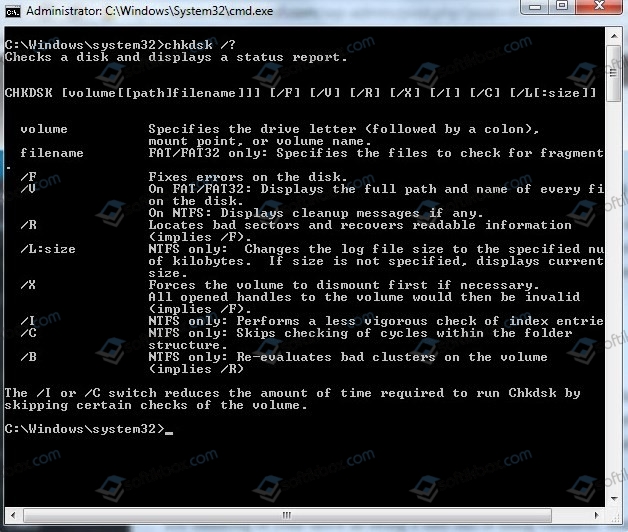
- Включаем ПК. Запускаем командную строку с правами Администратора. Вводим chkdsk C: /f, где С: — буква диска, /f – параметр команды для исправления ошибок. При запуске этой команды компьютер будет перезагружен, поэтому не стоит его в момент проверки трогать.
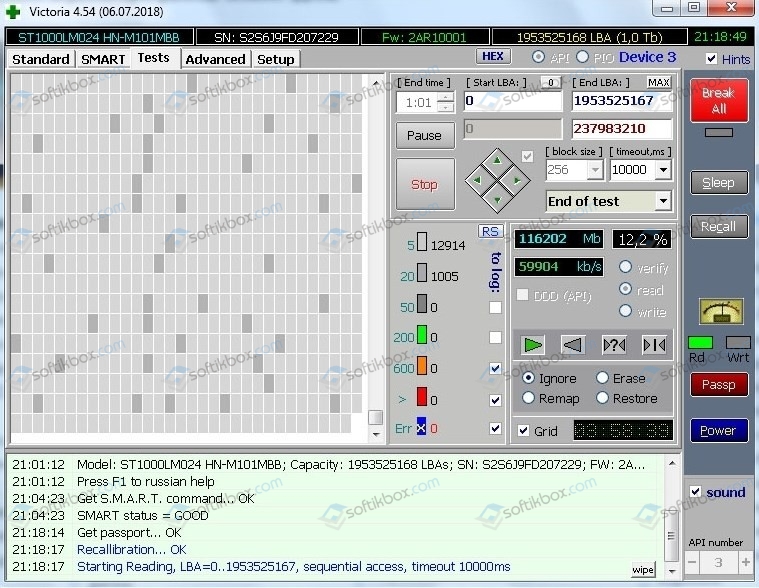
- Теперь записываем на диск или флешку программу Victoria HDD. Запускаем её, как и MemTest, в обход Windows.
Если проверка также не обнаружила ошибок, то нужно проверить материнскую плату возле разъемов на предмет микротрещин. Для этого потребуется линза или любое другое увеличивающее стекло. Ищем повреждение. Иногда дефекты возникают из-за неправильного обращения с портативными ПК, например, удерживание корпуса только за один край, что приводит к изгибу или растяжению и последующему растрескиванию материнской платы.
Если и эти действия не помогли определить источник проблемы и решить ей, то откатываем систему к более раннему состоянию, обновляем все драйвера. Если не помогло и это, то переустановка Windows 7 вам в помощь.
Data_Bus_Error — ошибка BSOD синего экрана, которая может содержать в себе код 0x0000002E и появиться она в основном из-за оборудования. Это может быть оперативная память или диск.

Как исправить Data Bus Error в Windows 10
Давайте разберем, что делать и как исправить ошибку Data Bus Error на синем экране при загрузке Windows 10.
1. Диагностика ОЗУ
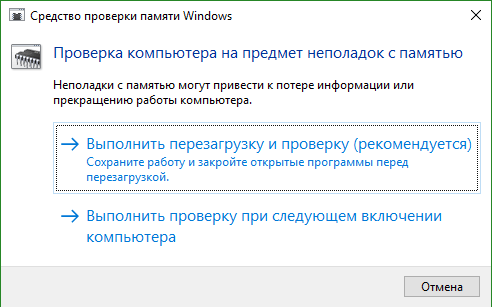
Нажмите Win+R и введите mdsched.exe, чтобы запустить диагностику ОЗУ. Выберите «Выполнить перезагрузку и проверку» и следуйте рекомендациям автоматического помощника на экране.
- Если ошибки будут найдены и Windows 10 не сможет их исправить, то обратитесь к полному руководству по диагностике ошибок в ОЗУ.
2. Сканирование Диска и Sys
Воспользуемся инструментами по автоматическому сканированию диска и системных файлов. Если будут обнаружены ошибки, то по возможности, будут автоматически исправлены. Запустите командную строку от имени администратора и введите ниже 3 команды по порядку, после чего перезагрузите компьютер:
chkdsk C: /f /r /x DISM.exe /Online /Cleanup-image /Restorehealth sfc /scannow
3. Оборудование
Если выше программные способы не помогли исправить ошибку Data Bus Error. то нужно приступить к физическому вмешательству оборудования.
- В первую очередь, извлеките все USB-устройства, как флешка, принтер и т.п. с USB портов компьютера или ноутбука, после чего перезагрузите систему.
- Если вы меня недавно компоненты для ПК, то попробуйте вернуть старый компонент вместо нового.
- Проверьте в корпусе ПК, что все фишки к жесткому диску и материнской платы присоединены плотно.
- Извлеките планку ОЗУ и вставьте её в другой порт, только продуйте от пыли все слоты. Если у вас несколько планок ОЗУ, то можно по очереди вставлять в разные слоты или меняя местами, чтобы выявить виновника.
Смотрите еще:
- Исправьте ошибку KERNEL DATA INPAGE в Windows 10
- Как исправить ошибку ACPI_BIOS_ERROR в Windows 10
- Способы устранение ошибки IRQL_GT_ZERO в Windows
- Как исправить VIDEO_DXGKRNL_FATAL_ERROR в Windows 10
- Ошибка Kernel_Mode_Heap_Corruption в Windows 10
[ Telegram | Поддержать ]