Привет, Хабр! Представляю вашему вниманию перевод статьи «Anatomy of Channels in Go» автора Uday Hiwarale.
Что такое каналы?
Канал — это объект связи, с помощью которого горутины обмениваются данными. Технически это конвейер (или труба), откуда можно считывать или помещать данные. То есть одна горутина может отправить данные в канал, а другая — считать помещенные в этот канал данные.
Создание канала
Go для создания канала предоставляет ключевое слово chan. Канал может передавать данные только одного типа, данные других типов через это канал передавать невозможно.
package main
import "fmt"
func main() {
var c chan int
fmt.Println(c)
} Пример в play.golang.org
Программа выше создает канал c, который будет передавать int. Данная программа выведет <nil>, потому что нулевое значение канала — это nil. Такой канал абсолютно бесполезен. Вы не можете передать или получить данные из канала, так как он не был создан (инициализирован). Для его создания необходимо использовать make.
package main
import "fmt"
func main() {
c := make(chan int)
fmt.Printf("type of `c` is %Tn", c)
fmt.Printf("value of `c` is %vn", c)
}Пример в play.golang.org
В данном примере используется короткий синтаксис := для создания канала с использованием функции make. Программа выше выводит следующий результат:
type of `c` is chan int
value of `c` is 0xc0420160c0Обратите внимание на значение переменной c, это адрес в памяти. В go каналы являются указателями. В большинстве своем, когда вам необходимо взаимодействовать с горутиной, вы помещаете канал как аргумент в функцию или метод. Горутина получает этот канал как аргумент, и вам не нужно разыменовывать его для того, чтобы извлечь или передать данные через этот канал.
Запись и чтение данных
Go предоставляет простой синтаксис для чтения <- и записи в канал
c <- dataВ этом примере мы передаем данные в канал c. Направление стрелки указывает на то, что мы извлекаем данные из data и помещаем в канал c.
<- cА здесь мы считываем данные с канала c. Эта операция не сохраняет данные в переменную и она является корректной. Если вам необходимо сохранить данные с канала в переменную, вы можете использовать следующий синтаксис:
var data int
data = <- cТеперь данные из канала c, который имеет тип int, могут быть записаны в переменную data. Так же можно упростить запись, используя короткий синтаксис:
data := <- cGo определит тип данных, передаваемый каналу c, и предоставит data корректный тип данных.
Все вышеобозначенные операции с каналом являются блокируемыми. Когда вы помещаете данные в канал, горутина блокируется до тех пор, пока данные не будут считаны другой горутиной из этого канала. В то же время операции канала говорят планировщику о планировании другой горутины, поэтому программа не будет заблокирована полностью. Эти функции весьма полезны, так как отпадает необходимость писать блокировки для взаимодействия горутин.
Каналы на практике
package main
import "fmt"
func greet(c chan string) {
fmt.Println("Hello " + <-c + "!")
}
func main() {
fmt.Println("main() started")
c := make(chan string)
go greet(c)
c <- "John"
fmt.Println("main() stopped")
}Пример в play.golang.org
Разберем программу по шагам:
- Мы объявили функцию
greet, которая принимает каналcкак аргумент. В этой функции мы считываем данные из каналаcи выводим в консоль. - В функции
mainпрограмма сначала выводит"main() started". - Затем мы, используя
make, создаем каналcс типом даныхstring. - Помещаем канал
св функциюgreetи запускаем функцию как горутину, используя ключевое словоgo. - Теперь у нас имеется две горутины
mainиgreet,mainпо-прежнему остается активной. - Помещаем данные в канал
си в этот моментmainблокируется до тех пор, пока другая горутина (greet) не считает данные из каналаc. Планировщик Go планирует запускgreetи выполняет описанное в первом пункте. - После чего
mainснова становится активной и выводит в консоль"main() stopped".
Deadlock (Взаимная блокировка)
Как уже ранее говорилось, чтение или запись данных в канал блокирует горутину и контроль передается свободной горутине. Представим, что такие горутины отсутствуют, либо они все «спят». В этот момент возникает deadlock, который приведет к аварийному завершению программы.
Если вы попытаетесь считать данные из канала, но в канале будут отсутствовать данные, планировщик заблокирует текущую горутину и разблокирует другую в надежде, что какая-либо горутина передаст данные в канал. То же самое произойдет в случае отправки данных: планировщик заблокирует передающую горутину, пока другая не считает данные из канала.
Примером deadlock может быть main горутина, которая эксклюзивно производит операции с каналом.
package main
import "fmt"
func main() {
fmt.Println("main() started")
c := make(chan string)
c <- "John"
fmt.Println("main() stopped")
}Пример в play.golang.org
Программа выше выведет следующее при попытке ее исполнить:
main() started
fatal error: all goroutines are asleep - deadlock!
goroutine 1 [chan send]:
main.main()
program.go:10 +0xfd
exit status 2Закрытие канала
В Go так же можно закрыть канал, через закрытый канал невозможно будет передать или принять данные. Горутина может проверить закрыт канал или нет, используя следующую конструкцию: val, ok := <- channel, где ok будет истиной в случае, если канал открыт или операция чтения может быть выполнена, иначе ok будет false, если канал закрыт и отсутствуют данных для чтения из него. Закрыть канал можно, используя встроенную функцию close, используя следующий синтаксис close(channel). Давайте рассмотрим следующий пример:
package main
import "fmt"
func greet(c chan string) {
<-c // for John
<-c // for Mike
}
func main() {
fmt.Println("main() started")
c := make(chan string, 1)
go greet(c)
c <- "John"
close(c) // closing channel
c <- "Mike"
fmt.Println("main() stopped")
}Пример в play.golang.org
Для понимания концепта блокировки первая операция отправки
c <- "John"будет блокирующей, и другая горутина должна будет считать данные из канала, следовательноgreetгорутина будет запланирована планировщиком. Затем первая операция чтения будет неблокируемой, поскольку присутствуют данные для чтения в каналеc. Вторая операция чтения будет блокируемой, потому что в каналеcотсутствуют данные, поэтому планировщик переключится наmainгорутину и программа выполнит закрытие каналаclose(c).
Вывод программы:
main() started
panic: send on closed channel
goroutine 1 [running]:
main.main()
program.go:20 +0x120
exit status 2Как вы можете заметить, программа завершилась с ошибкой, которая говорит, что запись в закрытый канал невозможна. Для дальнейшего понимания закрытия каналов давайте рассмотрим пример с циклом for.
Пример с циклом for
package main
import "fmt"
func squares(c chan int) {
for i := 0; i <= 9; i++ {
c <- i * i
}
close(c) // close channel
}
func main() {
fmt.Println("main() started")
c := make(chan int)
go squares(c) // start goroutine
// periodic block/unblock of main goroutine until chanel closes
for {
val, ok := <-c
if ok == false {
fmt.Println(val, ok, "<-- loop broke!")
break // exit break loop
} else {
fmt.Println(val, ok)
}
}
fmt.Println("main() stopped")
}Пример в play.golang.org
Бесконечный цикл может быть полезен для чтения данных из канала, когда мы не знаем сколько данных мы ожидаем. В этом примере мы создаем горутину squares, которая последовательно возвращает квадраты чисел от 0 до 9. В main мы считываем эти числа внутри цикла for.
В цикле мы считываем данные из канала, используя ранее рассмотренный синтаксис val, ok := <-c, где ok предоставляет нам информацию о том, что канал закрыт. В горутине squares после того, как записали все данные, мы закрываем канал, используя функцию close. Когда ok будет true, программа выведет значение val и статус канала (переменная ok). Когда ok станет false, мы завершим цикл, используя ключевое слово break. Таким образом мы получим следующий результат:
main() started
0 true
1 true
4 true
9 true
16 true
25 true
36 true
49 true
64 true
81 true
0 false <-- loop broke!
main() stoppedКогда канал закрыт, значение
val, считанное горутиной, является нулевым значением, в зависимости от типа данных канала. Так как в нашем случае тип данных каналаint, то нулевое значение будет 0, как раз это мы и видим в этой строке:0 false <-- loop broke!
Для того, чтобы избежать столь громоздкой проверки закрытия канала в случае цикла for, Go предоставляет ключевое слово range, которое автоматически останавливает цикл, когда канал будет закрыт. Давайте перепишем нашу программу с использованием range:
package main
import "fmt"
func squares(c chan int) {
for i := 0; i <= 9; i++ {
c <- i * i
}
close(c) // close channel
}
func main() {
fmt.Println("main() started")
c := make(chan int)
go squares(c) // start goroutine
// periodic block/unblock of main goroutine until chanel closes
for val := range c {
fmt.Println(val)
}
fmt.Println("main() stopped")
}Пример в play.golang.org
В этом примере мы использовали val := range c вместо бесконечного цикла, где range будет считывать данные из канала до тех пор, пока канал не будет закрыт. В результате программа выведет следующее:
main() started
0
1
4
9
16
25
36
49
64
81
main() stoppedЕсли вы не закроете канал для цикла
forс использованиемrange, то программа будет завершена аварийно из-заdealockво время выполнения.
Размер буфера канала
Как вы уже заметили, каждая операция отправки данных в канал блокирует текущую горутину. Но мы еще не использовали функцию make с 2-мя аргументами. Второй аргумент — это размер буфера канала. По-умолчанию размер буфера канала равен 0, такой канал называется небуферизированным каналом. То есть все, что мы пишем в канал, сразу доступно для чтения.
Когда размер буфера больше 0, горутина не блокируется до тех пор, пока буфер не будет заполнен. Когда буфер заполнен, любые значения отправляемые через канал, добавляются к буферу, отбрасывая предыдущее значение, которое доступно для чтения (где горутина будет заблокирована). Но есть один подвох, операция чтения на буферизированном канале является жадной, таким образом, как только операция чтения началась, она не будет завершена до полного опустошения буфера. Это означает, что горутина будет считывать буфер канала без блокировки до тех пор, пока буфер не станет пустым.
Для объявления буферизированного канала мы можем использовать следующий синтаксис:
c := make(chan Type, n)Это выражение создаст канал с типом данных Type и размером буфера n. Текущая горутина не будет заблокирована, пока в канал не будет передано n+1 данных.
Давайте докажем, что горутина не блокируется, пока буфер не заполнится и не переполнится:
package main
import "fmt"
func squares(c chan int) {
for i := 0; i <= 3; i++ {
num := <-c
fmt.Println(num * num)
}
}
func main() {
fmt.Println("main() started")
c := make(chan int, 3)
go squares(c)
c <- 1
c <- 2
c <- 3
fmt.Println("main() stopped")
}Пример в play.golang.org
В этом примере канал c имеет размер буфера равным 3. Это означает, что он может содержать 3 значения(c <- 3), но поскольку буфер не переполняется (так как мы не поместили новое значение в буфер), main не будет блокироваться, и программа будет успешно завершена без вывода чисел. Вывод программы:
main() started
main() stoppedТеперь давайте поместим еще одно значение в канал:
package main
import "fmt"
func squares(c chan int) {
for i := 0; i <= 3; i++ {
num := <-c
fmt.Println(num * num)
}
}
func main() {
fmt.Println("main() started")
c := make(chan int, 3)
go squares(c)
c <- 1
c <- 2
c <- 3
c <- 4 // blocks here
fmt.Println("main() stopped")
}Пример в play.golang.org
Как упоминалось ранее, теперь мы помещаем дополнительное значение в буфер и main блокируется, затем стартует горутина squares, которая вычитывает все значения из буфера, пока он не станет пустым.
Длина и емкость канала
Подобно срезам, буферизированный канал имеет длину и емкость. Длина канала — это количество значений в очереди (не считанных) в буфере канала, емкость — это размер самого буфера канала. Для того, чтобы вычислить длину, мы используем функцию len, а, используя функцию cap, получаем размер буфера.
package main
import "fmt"
func main() {
c := make(chan int, 3)
c <- 1
c <- 2
fmt.Printf("Length of channel c is %v and capacity of channel c is %v", len(c), cap(c))
fmt.Println()
}
Пример в play.golang.org
Вывод программы:
Length of channel c is 2 and capacity of channel c is 3Вышеприведенная программа работает нормально и deadlock не возникает, потому что размер буфера канала равен 3, а мы записали только 2 значения в буфер, поэтому планировщик не попытался запланировать другую горутину и не заблокировал main. Вы даже можете считать эти данные в main, если вам это необходимо, потому что буфер не заполнен.
Другой пример:
package main
import "fmt"
func sender(c chan int) {
c <- 1 // len 1, cap 3
c <- 2 // len 2, cap 3
c <- 3 // len 3, cap 3
c <- 4 // <- goroutine blocks here
close(c)
}
func main() {
c := make(chan int, 3)
go sender(c)
fmt.Printf("Length of channel c is %v and capacity of channel c is %vn", len(c), cap(c))
// read values from c (blocked here)
for val := range c {
fmt.Printf("Length of channel c after value '%v' read is %vn", val, len(c))
}
}Пример в play.golang.org
Вывод программы:
Length of channel c is 0 and capacity of channel c is 3
Length of channel c after value '1' read is 3
Length of channel c after value '2' read is 2
Length of channel c after value '3' read is 1
Length of channel c after value '4' read is 0Дополнительный пример с буферизированным каналом:
package main
import (
"fmt"
"runtime"
)
func squares(c chan int) {
for i := 0; i < 4; i++ {
num := <-c
fmt.Println(num * num)
}
}
func main() {
fmt.Println("main() started")
c := make(chan int, 3)
go squares(c)
fmt.Println("active goroutines", runtime.NumGoroutine())
c <- 1
c <- 2
c <- 3
c <- 4 // blocks here
fmt.Println("active goroutines", runtime.NumGoroutine())
go squares(c)
fmt.Println("active goroutines", runtime.NumGoroutine())
c <- 5
c <- 6
c <- 7
c <- 8 // blocks here
fmt.Println("active goroutines", runtime.NumGoroutine())
fmt.Println("main() stopped")
}
Пример в play.golang.org
Вывод программы:
main() started
active goroutines 2
1
4
9
16
active goroutines 1
active goroutines 2
25
36
49
64
active goroutines 1
main() stopped
Используя буферизованный канал и цикл for range, мы можем читать с закрытых каналов. Поскольку у закрытых каналов данные все еще живут в буфере, их можно считать:
package main
import "fmt"
func main() {
c := make(chan int, 3)
c <- 1
c <- 2
c <- 3
close(c)
// iteration terminates after receiving 3 values
for elem := range c {
fmt.Println(elem)
}
}Пример в play.golang.org
Работа с несколькими горутинами
Давайте напишем 2 горутины, одна для вычисления квадрата целого числа, а другая для вычисления куба:
package main
import "fmt"
func square(c chan int) {
fmt.Println("[square] reading")
num := <-c
c <- num * num
}
func cube(c chan int) {
fmt.Println("[cube] reading")
num := <-c
c <- num * num * num
}
func main() {
fmt.Println("[main] main() started")
squareChan := make(chan int)
cubeChan := make(chan int)
go square(squareChan)
go cube(cubeChan)
testNum := 3
fmt.Println("[main] sent testNum to squareChan")
squareChan <- testNum
fmt.Println("[main] resuming")
fmt.Println("[main] sent testNum to cubeChan")
cubeChan <- testNum
fmt.Println("[main] resuming")
fmt.Println("[main] reading from channels")
squareVal, cubeVal := <-squareChan, <-cubeChan
sum := squareVal + cubeVal
fmt.Println("[main] sum of square and cube of", testNum, " is", sum)
fmt.Println("[main] main() stopped")
}Пример в play.golang.org
Разберем программу по шагам:
- Мы создали 2 функции
squareиcube, которые мы запускаем как горутины. Обе получают каналcc типом данныхint, и считывают данные из него в переменнуюnum. Затем мы пишем данные в каналc. - В
mainгорутине мы создаем два каналаsquareChanиcubeChanc типом данныхint. - Запускаем
squareиcubeгорутины. - Так как контроль по-прежнему внутри
maintestNumполучает значение 3. - Затем мы отправляем данные в канал
squareChanиcubeChan. Горутинаmainбудет заблокирована, пока данные из каналов не будут считаны. Как только значение будет считано, горутина снова станет активной. - Когда в
mainмы попытаемся прочитать данные из заданных каналов(squareChanиcubeChan), управление будет заблокировано, пока другие горутины (squareиcube) не запишут данные в эти каналы. Мы также использовали сокращенный синтаксис:=для получения данных из каналов. - Когда операция записи канала завершена, начинает выполняться
main, после чего мы рассчитываем сумму и выводим ее.
Результат выполнения программы:
[main] main() started
[main] sent testNum to squareChan
[cube] reading
[square] reading
[main] resuming
[main] sent testNum to cubeChan
[main] resuming
[main] reading from channels
[main] sum of square and cube of 3 is 36
[main] main() stoppedОднонаправленные каналы
До сих пор мы видели каналы, которые могут передавать и принимать данные. Но мы также можем создать канал, который будет однонаправленным. Например, канал, который сможет только считывать данные, и канал который сможет только записывать их.
Однонаправленный канал также создается с использованием make, но с дополнительным стрелочным синтаксисом.
roc := make(<-chan int)
soc := make(chan<- int)Где roc канал для чтения, а soc канал для записи. Следует заметить, что каналы также имеют разный тип.
package main
import "fmt"
func main() {
roc := make(<-chan int)
soc := make(chan<- int)
fmt.Printf("Data type of roc is `%T`n", roc)
fmt.Printf("Data type of soc is `%Tn", soc)
}
Пример в play.golang.org
Вывод программы:
Data type of roc is `<-chan int`
Data type of soc is `chan<- intНо в чем смысл использования однонаправленного канала? Использование однонаправленного канала улучшает безопасность типов в программe, что, как следствие, порождает меньше ошибок.
Но допустим, что у вас есть программа, в которой вам нужно только читать данные из канала, а основная программа должна иметь возможность читать и записывать данные из/в тот же канал. Как это будет работать?
К счастью Go предоставляет простой синтаксис для преобразования двунаправленного канала в однонаправленный канал.
import "fmt"
func greet(roc <-chan string) {
fmt.Println("Hello " + <-roc + "!")
}
func main() {
fmt.Println("main() started")
c := make(chan string)
go greet(c)
c <- "John"
fmt.Println("main() stopped")
}Пример в play.golang.org
Мы только что изменили параметры greet для того, чтобы преобразовать двунаправленный канал на канал для чтения данных. Теперь мы можем только считывать данные из этого канала, а любые операции чтения приведут к аварийному завершению программы со следующей ошибкой:
"invalid operation: roc <- "some text" (send to receive-only type <-chan string)"
Анонимные горутины
Каналы также могут работать и с анонимными горутинами. Давайте изменим предыдущий пример, используя анонимные горутины.
Вот что у нас получилось:
package main
import "fmt"
func main() {
fmt.Println("main() started")
c := make(chan string)
// launch anonymous goroutine
go func(c chan string) {
fmt.Println("Hello " + <-c + "!")
}(c)
c <- "John"
fmt.Println("main() stopped")
}Пример в play.golang.org
Как вы можете заметить вывод программы остался тот же самый.
Канал с типом данных канала
Каналы являются объектами первого класса, то есть они могут быть использованы как значение элемента структуры, или аргументы функции, как возврат значения из функции/метода и даже как тип для другого канала. В примере ниже мы используем канал в качестве типа данных для другого канала:
package main
import "fmt"
// gets a channel and prints the greeting by reading from channel
func greet(c chan string) {
fmt.Println("Hello " + <-c + "!")
}
// gets a channels and writes a channel to it
func greeter(cc chan chan string) {
c := make(chan string)
cc <- c
}
func main() {
fmt.Println("main() started")
// make a channel `cc` of data type channel of string data type
cc := make(chan chan string)
go greeter(cc) // start `greeter` goroutine using `cc` channel
// receive a channel `c` from `greeter` goroutine
c := <-cc
go greet(c) // start `greet` goroutine using `c` channel
// send data to `c` channel
c <- "John"
fmt.Println("main() stopped")
}Пример в play.golang.org
select
select похож на switch без аргументов, но он может использоваться только для операций с каналами. Оператор select используется для выполнения операции только с одним из множества каналов, условно выбранного блоком case.
Давай взглянем на пример ниже, и обсудим как он работает:
package main
import (
"fmt"
"time"
)
var start time.Time
func init() {
start = time.Now()
}
func service1(c chan string) {
time.Sleep(3 * time.Second)
c <- "Hello from service 1"
}
func service2(c chan string) {
time.Sleep(5 * time.Second)
c <- "Hello from service 2"
}
func main() {
fmt.Println("main() started", time.Since(start))
chan1 := make(chan string)
chan2 := make(chan string)
go service1(chan1)
go service2(chan2)
select {
case res := <-chan1:
fmt.Println("Response from service 1", res, time.Since(start))
case res := <-chan2:
fmt.Println("Response from service 2", res, time.Since(start))
}
fmt.Println("main() stopped", time.Since(start))
}Пример в play.golang.org
В этом примере мы используем оператор select как switch, но вместо булевых операций, мы используем операции для чтения данных из канала. Оператор select также является блокируемым, за исключением использования default(позже вы увидите пример с его использованием). После выполнения одного из блоков case, горутина main будет разблокирована. Задались вопросом когда case условие выполнится?
Если все блоки case являются блокируемыми, тогда select будет ждать до момента, пока один из блоков case разблокируется и будет выполнен. Если несколько или все канальные операции не блокируемы, тогда один из неблокируемых case будет выбран случайным образом (Примечание переводчика: имеется ввиду случай, когда пришли одновременно данные из двух и более каналов).
Давайте наконец разберем программу, которую написали ранее. Мы запустили 2 горутины с независимыми каналами. Затем мы использовали оператор select c двумя case операторами. Один case считывает данные из chan1 а другой из chan2. Так как каналы не используют буфер, операция чтения будет блокируемой. Таким образом оба case будут блокируемыми и select будет ждать до тех пор, пока один из case не разблокируется.
Когда программа находится в блоке select горутина main будет заблокирована и будут запланированы все горутины (по одной за раз), которые используются в блоке select, в нашем случае это service1 и service2. service1 ждет 3 секунды, после чего будет разблокирован и сможет записать данные в chan1. Таким же образом как и service1 действует service2, только он ожидает 5 секунд и осуществляет запись в chan2. Так как service1 разблокируется раньше, чем service2, первый case разблокируется раньше и произведет чтение из chan1, а второй case будет проигнорирован. После чего управление вернется в main, и программа завершится после вывода в консоль.
Вывод программы:
main() started 0s
Response from service 1 Hello from service 1 3s
main() stopped 3sВышеприведенная программа имитирует реальный веб-сервис, в котором балансировщик нагрузки получает миллионы запросов и должен возвращать ответ от одной из доступных служб. Используя стандартные горутины, каналы и select, мы можем запросить ответ у нескольких сервисов, и тот, который ответит раньше всех, может быть использован.
Для того, чтобы симулировать случай, когда все блоки case разблокируются в одно и тоже время, мы может просто удалить вызов Sleep из горутин.
package main
import (
"fmt"
"time"
)
var start time.Time
func init() {
start = time.Now()
}
func service1(c chan string) {
c <- "Hello from service 1"
}
func service2(c chan string) {
c <- "Hello from service 2"
}
func main() {
fmt.Println("main() started", time.Since(start))
chan1 := make(chan string)
chan2 := make(chan string)
go service1(chan1)
go service2(chan2)
select {
case res := <-chan1:
fmt.Println("Response from service 1", res, time.Since(start))
case res := <-chan2:
fmt.Println("Response from service 2", res, time.Since(start))
}
fmt.Println("main() stopped", time.Since(start))
}Пример в play.golang.org
Данная программа выводит следующий результат:
main() started 0s
service2() started 481µs
Response from service 2 Hello from service 2 981.1µs
main() stopped 981.1µsНо иногда вы можете получить следующий результат:
main() started 0s
service1() started 484.8µs
Response from service 1 Hello from service 1 984µs
main() stopped 984µsЭто происходит потому, что операции chan1 и chan2 выполняются практически одновременно, но все же существует некоторая разница во времени при исполнении и планировании горутин.
Для того, чтобы сделать все блоки case неблокируемыми, мы можем использовать каналы с буфером.
package main
import (
"fmt"
"time"
)
var start time.Time
func init() {
start = time.Now()
}
func main() {
fmt.Println("main() started", time.Since(start))
chan1 := make(chan string, 2)
chan2 := make(chan string, 2)
chan1 <- "Value 1"
chan1 <- "Value 2"
chan2 <- "Value 1"
chan2 <- "Value 2"
select {
case res := <-chan1:
fmt.Println("Response from chan1", res, time.Since(start))
case res := <-chan2:
fmt.Println("Response from chan2", res, time.Since(start))
}
fmt.Println("main() stopped", time.Since(start))
}Пример в play.golang.org
Вывод может быть следующим:
main() started 0s
Response from chan2 Value 1 0s
main() stopped 1.0012msИли таким:
main() started 0s
Response from chan1 Value 1 0s
main() stopped 1.0012msВ приведенной программе оба канала имеют буфер размером 2. Так как мы отправляем 2 значения в буфер, горутина не будет заблокирована и программа перейдет в блок select. Чтение из буферизированного канала не является блокируемой операцией, если буфер не пустой, поэтому все блоки case будут неблокируемыми, и во время выполнения Go выберет case случайным образом.
default case
Так же как и switch, оператор select поддерживает оператор default. Оператор default является неблокируемым, но это еще не все, оператор default делает блок select всегда неблокируемым. Это означает, что операции отправки и чтение на любом канале (не имеет значения будет ли канал с буфером или без) всегда будут неблокируемыми.
Если значение будет доступно на каком-либо канале, то select выполнит этот case. Если нет, то он немедленно выполнит default.
package main
import (
"fmt"
"time"
)
var start time.Time
func init() {
start = time.Now()
}
func service1(c chan string) {
fmt.Println("service1() started", time.Since(start))
c <- "Hello from service 1"
}
func service2(c chan string) {
fmt.Println("service2() started", time.Since(start))
c <- "Hello from service 2"
}
func main() {
fmt.Println("main() started", time.Since(start))
chan1 := make(chan string)
chan2 := make(chan string)
go service1(chan1)
go service2(chan2)
select {
case res := <-chan1:
fmt.Println("Response from service 1", res, time.Since(start))
case res := <-chan2:
fmt.Println("Response from service 2", res, time.Since(start))
default:
fmt.Println("No response received", time.Since(start))
}
fmt.Println("main() stopped", time.Since(start))
}
Пример в play.golang.org
Вывод программы:
main() started 0s
No response received 0s
main() stopped 0sТак как в приведенной программе каналы используются без буфера, и значение еще отсутствует, в обоих каналах будет исполнен default. Если бы в блоке select отсутствовал default, то произошла бы блокировка и результат был бы другим.
Так как с default select не блокируется, планировщик не запускает доступные горутины. Но main можно заблокировать, вызвав time.Sleep. Таким образом все горутины будут исполнены, и когда управление перейдет в main, каналы будут иметь данные для чтения.
package main
import (
"fmt"
"time"
)
var start time.Time
func init() {
start = time.Now()
}
func service1(c chan string) {
fmt.Println("service1() started", time.Since(start))
c <- "Hello from service 1"
}
func service2(c chan string) {
fmt.Println("service2() started", time.Since(start))
c <- "Hello from service 2"
}
func main() {
fmt.Println("main() started", time.Since(start))
chan1 := make(chan string)
chan2 := make(chan string)
go service1(chan1)
go service2(chan2)
time.Sleep(3 * time.Second)
select {
case res := <-chan1:
fmt.Println("Response from service 1", res, time.Since(start))
case res := <-chan2:
fmt.Println("Response from service 2", res, time.Since(start))
default:
fmt.Println("No response received", time.Since(start))
}
fmt.Println("main() stopped", time.Since(start))
}Пример в play.golang.org
По итогу мы получим следующий результат:
main() started 0s
service1() started 0s
service2() started 0s
Response from service 1 Hello from service 1 3.0001805s
main() stopped 3.0001805sИли такой, в некоторых случаях:
main() started 0s
service1() started 0s
service2() started 0s
Response from service 2 Hello from service 2 3.0000957s
main() stopped 3.0000957sDeadlock
Для того, чтобы избежать deadlock, можно использовать default, чтобы операции с каналами стали неблокируемыми, планировщик Go не будет планировать горутины для отправки данных в канал, даже если данные не доступны на данный момент.
package main
import (
"fmt"
"time"
)
var start time.Time
func init() {
start = time.Now()
}
func main() {
fmt.Println("main() started", time.Since(start))
chan1 := make(chan string)
chan2 := make(chan string)
select {
case res := <-chan1:
fmt.Println("Response from chan1", res, time.Since(start))
case res := <-chan2:
fmt.Println("Response from chan2", res, time.Since(start))
default:
fmt.Println("No goroutines available to send data", time.Since(start))
}
fmt.Println("main() stopped", time.Since(start))
}Пример в play.golang.org
Вывод программы:
main() started 0s
No goroutines available to send data 0s
main() stopped 0sАналогично получению данных, операция отправки данных будет работать также в случае использования оператора default, если присутствуют другие горутины, готовые принять отправленные данные (в режиме ожидания).
nil каналы
Как мы уже знаем, нулевое значение в случае канала — это nil, из-за этого мы не может выполнять операции отправки или приема данных. При попытке отправить или принять данные через этот канал в блоке select, мы получим ошибку.
package main
import "fmt"
func service(c chan string) {
c <- "response"
}
func main() {
fmt.Println("main() started")
var chan1 chan string
go service(chan1)
select {
case res := <-chan1:
fmt.Println("Response from chan1", res)
}
fmt.Println("main() stopped")
}Пример в play.golang.org
Вывод программы:
main() started
fatal error: all goroutines are asleep - deadlock!
goroutine 1 [select (no cases)]:
main.main()
program.go:17 +0xc0
goroutine 6 [chan send (nil chan)]:
main.service(0x0, 0x1)
program.go:6 +0x40
created by main.main
program.go:14 +0xa0Из полученного результата мы можем заметить, что select (no cases) означает, что select оператор пустой, потому что конструкции case с нулевым каналом игнорируются. Но так как пустой select{} блокирует main горутину, активируется горутина service, которая попытается записать данные в nil канал, что впоследствии приведет к аварийному завершению программы со следующей ошибкой: chan send (nil chan). Для того, чтобы этого избежать, можно использовать оператор default.
package main
import "fmt"
func service(c chan string) {
c <- "response"
}
func main() {
fmt.Println("main() started")
var chan1 chan string
go service(chan1)
select {
case res := <-chan1:
fmt.Println("Response from chan1", res)
default:
fmt.Println("No response")
}
fmt.Println("main() stopped")
}Пример в play.golang.org
Вывод программы:
main() started
No response
main() stoppedВ приведенной программе блоки case игнорируются, так как блок default исполняется первым. Поэтому планировщик не запускает горутину service. Такие программы, естественно, писать не стоит, необходимо всегда проверять, что канал не nil.
Добавляем timeout
Ранее написанная программа не особенно полезна из-за того, что блок default выполнится раньше. Но иногда необходимо, чтобы определенный сервис ответил за определенное время, если он не отвечает, тогда должен выполниться блок default. Этого можно добиться, используя case с канальными операциями, которые будут разблокированы после заданного времени. Такая канальная операция предоставляется функцией After из пакета (package) time. Давайте рассмотрим следующий пример:
package main
import (
"fmt"
"time"
)
var start time.Time
func init() {
start = time.Now()
}
func service1(c chan string) {
time.Sleep(3 * time.Second)
c <- "Hello from service 1"
}
func service2(c chan string) {
time.Sleep(5 * time.Second)
c <- "Hello from service 2"
}
func main() {
fmt.Println("main() started", time.Since(start))
chan1 := make(chan string)
chan2 := make(chan string)
go service1(chan1)
go service2(chan2)
select {
case res := <-chan1:
fmt.Println("Response from service 1", res, time.Since(start))
case res := <-chan2:
fmt.Println("Response from service 2", res, time.Since(start))
case <-time.After(2 * time.Second):
fmt.Println("No response received", time.Since(start))
}
fmt.Println("main() stopped", time.Since(start))
}Пример в play.golang.org
Данная программа выдаст следующий результат через 2 секунды:
main() started 0s
No response received 2s
main() stopped 2sВ этой программе, благодаря конструкции <-time.After(2 * time.Second) горутина main будет разблокирована через 2 секунды. time.After создаёт канал, по которому посылаются метки времени с заданным интервалом. Так как данные из каналов chan1 и chan2 не были получены, выполняется 3-й блок, после чего программа успешно завершается.
Это может быть полезно в случае, когда вы не хотите ждать ответа от сервера продолжительное время. Если изменить time.After(2 * time.Second) на time.After(10 * time.Second) мы получим результат из service1.
Пустой select
Подобно пустому for{}, пустой select{} так же является валидным, но есть подвох. Как мы уже знаем select блокируется до тех пор, пока один из блоков case не будет выполнен, но так как в пустом select отсутствуют блоки case, горутина не будет разблокирована, и как результат, мы получим deadlock.
package main
import "fmt"
func service() {
fmt.Println("Hello from service!")
}
func main() {
fmt.Println("main() started")
go service()
select {}
fmt.Println("main() stopped")
}Пример в play.golang.org
В результате мы получим следующий вывод:
main() started
Hello from service!
fatal error: all goroutines are asleep - deadlock!
goroutine 1 [select (no cases)]:
main.main()
program.go:16 +0xba
exit status 2WaitGroup
Теперь давайте представим состояние, когда вам нужно узнать, что все горутины были выполнены (Примечание переводчика: например, операция сложения запущенная в нескольких горутинах). Такая задача является прямо противоположной тому, что мы делали с select. Здесь мы дожидаемся полного завершения всех горутин.
На помощь нам приходит WaitGroup. Это структура со счетчиком, которая отслеживает сколько горутин вами было создано, и сколько из них было завершено (Примечание переводчика: сама она это делать не умеет, но есть методы, которые позволят вам добиться этого, так же подобного можно добиться с использованием каналов, но это считается устаревшим подходом и, как вы уже могли заметить, имеет ряд недостатков). Достижение счетчиком нуля будет означать, что все горутины были выполнены.
Давайте разберем следующий пример:
package main
import (
"fmt"
"sync"
"time"
)
func service(wg *sync.WaitGroup, instance int) {
time.Sleep(2 * time.Second)
fmt.Println("Service called on instance", instance)
wg.Done() // decrement counter
}
func main() {
fmt.Println("main() started")
var wg sync.WaitGroup // create waitgroup (empty struct)
for i := 1; i <= 3; i++ {
wg.Add(1) // increment counter
go service(&wg, i)
}
wg.Wait() // blocks here
fmt.Println("main() stopped")
}Пример в play.golang.org
В этой программе мы создали пустой WaitGroup, внутри себя эта структура содержит приватные поля noCopy и state1 (https://golang.org/src/sync/waitgroup.go?s=574:929#L10). Структура имеет три метода: Add, Wait и Done. Давайте их рассмотрим.
Метод Add принимает int аргумент, который является delta (дельтой) для счетчика WaitGroup. Где счетчика — это число со значением, по умолчанию равным 0. Он хранит число запущенных горутин. Когда WaitGroup создана, значение счетчика будет равно 0, и мы можем увеличивать его, передавая delta как параметр метода Add. Счетчика не понимает автоматически, когда была запущена программа, поэтому нам нужно вручную увеличивать его, используя функцию Add.
Метод Wait используется для блокировки текущей горутины, когда мы его вызываем. Как только счетчик достигнет 0, горутина будет разблокирована. Поэтому нам необходимо как-то уменьшать значение счетчика.
Метод Done уменьшает значение счетчика. Он не принимает никаких параметров. (Примечание переводчика: если посмотреть исходники пакета sync, то можно увидеть, что внутри себя он просто вызывает Add(-1)).
И так, после создания wg, мы запускаем итерацию в цикле for от 1 до 3х включительно. На каждой итерации мы запускаем горутину и инкрементируем счетчик на 1. Таким образом у нас будет 3 запущенных горутины, которые необходимо выполнить и WaitGroup со значением счетчика равным 3. Заметьте, что мы передали указатель на wg в горутину. Это необходимо, чтобы вызвать Done в горутине после завершения работы, что в свою очередь уменьшит значение счетчика.
После выполнения цикла for, мы запускаем wg.Wait(), чтобы передать управление другим горутинам, и, как следствие, это заблокирует наш main до тех пор, пока все горутины не будут завершены, и значение счетчика не будет равно 0. После чего main будет разблокирована, и программа будет успешно завершена.
Таким образом мы получим следующий вывод:
main() started
Service called on instance 1
Service called on instance 3
Service called on instance 2
main() stoppedРезультат выше может отличаться, из-за порядка выполнения горутин.
Пул воркеров
Как следует из названия, пул воркеров — это набор горутин, работающих одновременно для определенной задачи. В примере WaitGroup мы увидели набор горутин, работающих одновременно, но у них не было определенной задачи. Как только вы добавляете каналы в горутины, у них появляется какая-то работа, и они становятся пулом воркеров.
package main
import (
"fmt"
"time"
)
// worker than make squares
func sqrWorker(tasks <-chan int, results chan<- int, id int) {
for num := range tasks {
time.Sleep(time.Millisecond) // simulating blocking task
fmt.Printf("[worker %v] Sending result by worker %vn", id, id)
results <- num * num
}
}
func main() {
fmt.Println("[main] main() started")
tasks := make(chan int, 10)
results := make(chan int, 10)
// launching 3 worker goroutines
for i := 0; i < 3; i++ {
go sqrWorker(tasks, results, i)
}
// passing 5 tasks
for i := 0; i < 5; i++ {
tasks <- i * 2 // non-blocking as buffer capacity is 10
}
fmt.Println("[main] Wrote 5 tasks")
// closing tasks
close(tasks)
// receving results from all workers
for i := 0; i < 5; i++ {
result := <-results // blocking because buffer is empty
fmt.Println("[main] Result", i, ":", result)
}
fmt.Println("[main] main() stopped")
}Пример в play.golang.org
Вывод программы:
[main] main() started
[main] Wrote 5 tasks
[worker 0] Sending result by worker 0
[worker 2] Sending result by worker 2
[worker 1] Sending result by worker 1
[main] Result 0 : 4
[main] Result 1 : 0
[main] Result 2 : 16
[worker 2] Sending result by worker 2
[main] Result 3 : 64
[worker 0] Sending result by worker 0
[main] Result 4 : 36
[main] main() stoppedИтак, давайте разберемся с тем, что тут происходит:
- Функция
sqrWorkerпринимает каналtasks, каналresults, а так жеid. Задача этой горутины — отправлять квадрат числа, полученного из каналаtasks, в каналresults. - В функции
main, мы создали каналыtasksиresultс размером буфера, равной 10. Следовательно, любая операция отправки будет неблокируемой, пока буфер не заполнится. Поэтому канал с буфером большого размера — это неплохая идея. - Затем мы порождаем несколько экземпляров
sqrWorkerв виде горутин с двумя вышеописанными каналами и параметромid, чтобы позже получить информацию о том, какой воркер выполняет задачу. - Далее мы передали 5 значений каналу
tasks, операция будет неблокируемой, так как размер буфера не превышен. - Так как мы закончили с каналом
tasks, закрываем его. В этом нет необходимости, но это сэкономит много времени в будущем, если появятся ошибки. - Используя цикл
forс 5ю итерациями, мы извлекаем результат из каналаresults. Так как операция чтения на пустом буфере является блокируемой, планировщик запустит горутину из пула воркеров. До тех пор, пока горутина не вернет результат,mainбудет заблокирован. - Поскольку мы симулируем операцию блокировки в горутине, это приведет к вызову планировщиком другой доступной горутины для запуска. Когда горутина запустится, она запишет результат в канал
results, а так как операция записи в канал с буфером является неблокируемым до тех пор, пока буфер не заполнен, блокировки при записи не произойдет. Таким образом как только одна из горутин завершится, запустятся другие горутины и считают данные из каналаtasks. После того, как все горутины считают данные изtasks, циклforзавершится, а каналtasksбудет пустым. Так же не произойдет ошибкаdeadlock, так как каналtasksбыл закрыт. - Иногда все воркеры могут находиться в режиме ожидания, поэтому
mainпрограмма будет работать до тех пор, пока каналresultsне будет пуст. - После того, как все воркеры отработают,
mainвосстановит контроль, выведет оставшиеся результаты из каналаresults, и продолжит выполнение.
Приведенный пример достаточно большой, но прекрасно объясняет, как несколько горутин могут извлекать данные из канала и выполнять свою работу. Горутины весьма эффективны, когда они могут блокироваться. Если убрать вызов time.Sleep(), то только одна горутина будет выполняться, так как другие горутины не будут запланированы, до тех пор пока цикл не закончится и горутина не завершится.
Вы можете получить другой результат в приведенном примере, в зависимости от скорости работы вашей системы.
Давайте воспользуемся концепцией WaitGroup для синхронизации горутин. Используя предыдущий пример с WaitGroup, мы можем получить те же результаты, но более элегантно.
package main
import (
"fmt"
"sync"
"time"
)
// worker than make squares
func sqrWorker(wg *sync.WaitGroup, tasks <-chan int, results chan<- int, instance int) {
for num := range tasks {
time.Sleep(time.Millisecond)
fmt.Printf("[worker %v] Sending result by worker %vn", instance, instance)
results <- num * num
}
// done with worker
wg.Done()
}
func main() {
fmt.Println("[main] main() started")
var wg sync.WaitGroup
tasks := make(chan int, 10)
results := make(chan int, 10)
// launching 3 worker goroutines
for i := 0; i < 3; i++ {
wg.Add(1)
go sqrWorker(&wg, tasks, results, i)
}
// passing 5 tasks
for i := 0; i < 5; i++ {
tasks <- i * 2 // non-blocking as buffer capacity is 10
}
fmt.Println("[main] Wrote 5 tasks")
// closing tasks
close(tasks)
// wait until all workers done their job
wg.Wait()
// receving results from all workers
for i := 0; i < 5; i++ {
result := <-results // non-blocking because buffer is non-empty
fmt.Println("[main] Result", i, ":", result)
}
fmt.Println("[main] main() stopped")
}Пример в play.golang.org
Результат работы программы:
[main] main() started
[main] Wrote 5 tasks
[worker 0] Sending result by worker 0
[worker 2] Sending result by worker 2
[worker 1] Sending result by worker 1
[worker 2] Sending result by worker 2
[worker 0] Sending result by worker 0
[main] Result 0 : 4
[main] Result 1 : 0
[main] Result 2 : 16
[main] Result 3 : 64
[main] Result 4 : 36
[main] main() stoppedВ приведенном результате мы получили немного другой, более аккуратный вывод, потому что операция чтения из канала results в main не блокируется, так как канал results уже содержит данные из-за вызванного ранее wg.Wait(). Используя WaitGroup, мы можем предотвратить много (ненужных) переключений контекста (планирование горутин и их запуск), в данном случае 7 против 9 в предыдущем примере. Но при этом вам приходится ожидать завершения всех горутин.
Мьютекс
Мьютекс — это один из самых простых концепций в Go. Но прежде чем разобраться в нем, давайте для начала разберемся в понятии race condition(состоянии гонки). Горутины имеют независимый стек, следовательно нет необходимости в обмене данными между ними. Но, иногда, необходимо использовать общие данные между несколькими горутинами. В этом случае несколько горутин пытаются взаимодействовать с данными в общей области памяти, что иногда приводит к непредсказуемому результату. Рассмотрим простой пример:
package main
import (
"fmt"
"sync"
)
var i int // i == 0
// goroutine increment global variable i
func worker(wg *sync.WaitGroup) {
i = i + 1
wg.Done()
}
func main() {
var wg sync.WaitGroup
for i := 0; i < 1000; i++ {
wg.Add(1)
go worker(&wg)
}
// wait until all 1000 goroutines are done
wg.Wait()
// value of i should be 1000
fmt.Println("value of i after 1000 operations is", i)
}Пример в play.golang.org
В приведенной программе мы порождаем 1000 горутин, которые увеличивают значение глобальной переменной i, равной изначально 0. Мы написали программу с использованием WaitGroup, поскольку мы хотим, чтобы все 1000 горутин увеличивали значение i последовательно, и, в результате, итоговое значение было равно 1000. Когда main восстанавливается после вызова wg.Wait(), мы выводим значение i. Давайте посмотрим на конечный результат:
value of i after 1000 operations is 937Что? Почему мы получили значение меньше 1000? Возможно часть горутин не отработала. Но, в действительности, произошло race condition. Посмотрим, как это могло случиться.
Вычисление i = i + 1 состоит из трех шагов:
- Получить значение
i - Увеличить на 1
- Обновить значение
iс новым значением
Давайте представим следующий сценарий, в котором между этими шагами были запланированы разные горутины. К примеру, рассмотрим 2 горутины из пула 1000 горутин, а именно. G1 и G2.
G1 запускается, когда i равна 0, после второго шага i стала равной 1. Но перед тем, как G1 изменит значение i на 1 в шаге 3, новая горутина G2 уже была запланирована, и эта горутина выполнит те же шаги. В случае G2, значение i все еще 0, поэтому на третьем шаге значение i будет равно 1, в это время G1 собирается закончить третий шаг и изменить значение i на 1. В идеальном мире, где горутины планируются после выполнения всех 3-х шагов, успешное выполнение 2х горутин привело бы к значению i равному 2, но это не так. Поэтому, мы можем предположить, почему наша программа не выдает значение i равным 1000.
Как мы знаем, горутины планируются совместно и до тех пор, пока горутина не заблокируется по одному из условий, другая горутина не будет запланирована. Но операция i = i + 1 не является блокируемой, тогда почему планировщик Go планирует другие горутины?
Вы можете посмотреть ответ на stackoverflow. В любом случае не следует полагаться на алгоритм планирования Go и реализовывать собственную логику для синхронизации различных программ.
Один из способов удостовериться, что горутина выполнит все 3 вышеуказанных шага за раз, это использовать мьютекс. Мьютекс — это концепция в программировании, где только один поток может выполнять несколько операций одновременно. Это делается с помощью подпрограммы, получающей блокировку для выполнения любых манипуляции со значением, которое она должна изменить, а затем снимает блокировку после. Когда значение заблокировано, никакая другая подпрограмма не может читать или записывать его.
В Go мьютексы — это структура данных, которую предоставляет пакет sync. В Go перед выполнением любой операции со значением, которое может вызвать race condition, мы получаем эксклюзивную блокировку, используя метод mutex.Lock(). Как только мы выполнили операцию i = i + 1 в ранее написанной программе, мы снимаем блокировки, используя метод mutex.Unlock(). Когда любая другая горутина попытается прочитать или записать значение i при наличии блокировки, эта программа будет блокироваться до тех пор, пока мьютекс не будет разблокирован. И горутина сможет безопасно читать и писать данные в переменную i. Запомните, что любые переменные, находящиеся между Lock и Unlock, будут недоступны для других горутин до тех пор, пока не выполнится операция снятия блокировки.
Давайте изменим предыдущий пример, используя мьютекс.
package main
import (
"fmt"
"sync"
)
var i int // i == 0
// goroutine increment global variable i
func worker(wg *sync.WaitGroup, m *sync.Mutex) {
m.Lock() // acquire lock
i = i + 1
m.Unlock() // release lock
wg.Done()
}
func main() {
var wg sync.WaitGroup
var m sync.Mutex
for i := 0; i < 1000; i++ {
wg.Add(1)
go worker(&wg, &m)
}
// wait until all 1000 goroutines are done
wg.Wait()
// value of i should be 1000
fmt.Println("value of i after 1000 operations is", i)
}В данной программе мы создали мьютекс и передали его указатель во все горутины, прежде чем выполнить операцию с переменной i, мы получили эксклюзивную блокировку, используя m.Lock(), а после операций с переменной i мы сняли блокировку, используя m.Unlock(). Таким образом мы получим следующий результат:
value of i after 1000 operations is 1000Из приведенного результата видно, что мьютекс помог нам разрешить race condition. Но старайтесь избегать использования общих ресурсов между горутинами.
Вы можете проверить программу на
race conditionв Go, используя флагrace, при запуске программы.go run -race program.go. Более подробно об этом можно прочитать здесь.
Паттерны конкурентного программирования
Существует множество способов, с помощью которых параллелизм делает нашу повседневную жизнь проще. Ниже приведены несколько концепций и методологий, с помощью которых мы можем сделать программы быстрее и надежнее.
Генератор
Используя каналы, мы можем достаточно просто реализовать генератор. Так как вычисления в генераторе могут являться вычислительно дорогими, то мы могли бы сделать генерацию данных конкурентно. Таким образом, программе не нужно ждать, пока все данные будут сгенерированы. Например, генерация ряда Фибоначчи.
package main
import "fmt"
// fib returns a channel which transports fibonacci numbers
func fib(length int) <-chan int {
// make buffered channel
c := make(chan int, length)
// run generation concurrently
go func() {
for i, j := 0, 1; i < length; i, j = i+j, i {
c <- i
}
close(c)
}()
// return channel
return c
}
func main() {
// read 10 fibonacci numbers from channel returned by `fib` function
for fn := range fib(10) {
fmt.Println("Current fibonacci number is", fn)
}
}Current fibonacci number is 0
Current fibonacci number is 1
Current fibonacci number is 1
Current fibonacci number is 2
Current fibonacci number is 3
Current fibonacci number is 5
Current fibonacci number is 8Используя функцию fib, мы получаем канал, который мы можем использовать в цикле. Находясь внутри функции fib, мы создаем и возвращаем канал только для приема. Возвращаемый канал преобразуется из двунаправленного канала в однонаправленный канал для приема. Используя анонимную горутину, мы помещаем числа Фибоначчи в этот канал. Как только мы закончили с циклом for, мы закрываем канал внутри анонимной горутины. В main, используя range, мы итерируем данные канала, полученные после вызова функции fib.
Fan-in и Fan-out
Fan-in — это стратегия мультиплексирования, при которой входы нескольких каналов объединяются в один выходной канал. Fan-out — это обратная операция, при которой один канал разделяется на несколько каналов.
package main
import (
"fmt"
"sync"
)
// return channel for input numbers
func getInputChan() <-chan int {
// make return channel
input := make(chan int, 100)
// sample numbers
numbers := []int{0, 1, 2, 3, 4, 5, 6, 7, 8, 9}
// run goroutine
go func() {
for num := range numbers {
input <- num
}
// close channel once all numbers are sent to channel
close(input)
}()
return input
}
// returns a channel which returns square of numbers
func getSquareChan(input <-chan int) <-chan int {
// make return channel
output := make(chan int, 100)
// run goroutine
go func() {
// push squares until input channel closes
for num := range input {
output <- num * num
}
// close output channel once for loop finishes
close(output)
}()
return output
}
// returns a merged channel of `outputsChan` channels
// this produce fan-in channel
// this is variadic function
func merge(outputsChan ...<-chan int) <-chan int {
// create a WaitGroup
var wg sync.WaitGroup
// make return channel
merged := make(chan int, 100)
// increase counter to number of channels `len(outputsChan)`
// as we will spawn number of goroutines equal to number of channels received to merge
wg.Add(len(outputsChan))
// function that accept a channel (which sends square numbers)
// to push numbers to merged channel
output := func(sc <-chan int) {
// run until channel (square numbers sender) closes
for sqr := range sc {
merged <- sqr
}
// once channel (square numbers sender) closes,
// call `Done` on `WaitGroup` to decrement counter
wg.Done()
}
// run above `output` function as groutines, `n` number of times
// where n is equal to number of channels received as argument the function
// here we are using `for range` loop on `outputsChan` hence no need to manually tell `n`
for _, optChan := range outputsChan {
go output(optChan)
}
// run goroutine to close merged channel once done
go func() {
// wait until WaitGroup finishes
wg.Wait()
close(merged)
}()
return merged
}
func main() {
// step 1: get input numbers channel
// by calling `getInputChan` function, it runs a goroutine which sends number to returned channel
chanInputNums := getInputChan()
// step 2: `fan-out` square operations to multiple goroutines
// this can be done by calling `getSquareChan` function multiple times where individual function call returns a channel which sends square of numbers provided by `chanInputNums` channel
// `getSquareChan` function runs goroutines internally where squaring operation is ran concurrently
chanOptSqr1 := getSquareChan(chanInputNums)
chanOptSqr2 := getSquareChan(chanInputNums)
// step 3: fan-in (combine) `chanOptSqr1` and `chanOptSqr2` output to merged channel
// this is achieved by calling `merge` function which takes multiple channels as arguments
// and using `WaitGroup` and multiple goroutines to receive square number, we can send square numbers
// to `merged` channel and close it
chanMergedSqr := merge(chanOptSqr1, chanOptSqr2)
// step 4: let's sum all the squares from 0 to 9 which should be about `285`
// this is done by using `for range` loop on `chanMergedSqr`
sqrSum := 0
// run until `chanMergedSqr` or merged channel closes
// that happens in `merge` function when all goroutines pushing to merged channel finishes
// check line no. 86 and 87
for num := range chanMergedSqr {
sqrSum += num
}
// step 5: print sum when above `for loop` is done executing which is after `chanMergedSqr` channel closes
fmt.Println("Sum of squares between 0-9 is", sqrSum)
}Пройдем по шагам.
- Получаем канал
chanInputNums, посредством вызова функцииgetInputChan. ФункцияgetInputChanсоздает канал и возвращает его как канал, доступный только для чтения, а также запускает анонимную горутину, которая последовательно помещает в канал числа из массиваnumbersи закрывает канал. - Разделяем наш канал (fan-out) на два канала(
chanOptSqr1иchanOptSqr2), передавая его два раза функцииgetSquareChan. ФункцияgetSquareChanсоздает канал и возвращает его как канал, доступный только для чтения, а также запускает анонимную горутину для вычисления квадрата чисел на основе данных канала, полученного в качестве аргумента функции. - Собираем данные из каналов в один (fan-in), используя функцию
merge. В функцииmergeмы создаемWaitGroup, а также новый канал(merged), где мы объединим все данные из списка каналовoutputsChan, после, мы увеличиваем счетчик на основании числа полученных каналов, подготавливаем анонимную функцию для чтения данных из канала и группировки данных в наш новый каналmerged, а также уменьшим значение счетчика, когда все данные из переданного канала будут считаны. Вызываем нашу анонимную функцию для каждого канала в качестве горутины. А так же создаем и стартуем еще одну анонимную горутину для того, чтобы дождаться выполнения операции объединения всех данных в один канал и после этого закрываем канал в рамках анонимной функции. После чего возвращаем наш новый каналmerged. - Считываем данные из канала
chanMergedSqrиспользуяforиrange, и суммируем полученные данные. - В конце выводим наш результат.
Вывод программы:
Sum of squares between 0-9 is 285UPDATE:
Дополнительная литература по внутреннему устройству каналов:
- Как устроены каналы в Go
- Под капотом Golang — как работают каналы. Часть 1.
- Строение каналов в Golang. Часть 2.
Перевод публикуется с сокращениями, автор оригинальной статьи
Stefan Nilsson.
Для начала необходимо разобраться, как писать базовые программы на Go. Освежим знания, чтобы помочь себе быстрее освоиться.
Основы
The
Go Playground – интерактивный веб-сервис, который позволяет запускать в песочнице небольшие
программы в духе «Hello
world!». Попробуйте!
package main
import "fmt"
func main() {
fmt.Println("Hello, world!")
}
Изучите основы Go
A Tour of Go – еще один интерактивный учебник с кучей примеров. Он берет начало на официальном сайте и обучает вас основам программирования Go в браузере.
Установите инструменты Go
В Getting Started
объясняется, как установить инструменты Go. Доступны бинарные пакеты для FreeBSD,
Linux, Mac OS X и Windows, а также инструкции по развертыванию и настройке.
Начните проект Go
How to Write Go Code посвящен разработке простых пакетов Go. Он рассказывает про организацию и тестирование кода, а также про использование команд fetch,
build и install.
Горутины
Вы можете создать новый
поток (горутину) с помощью оператора go. Все горутины в одной программе используют одно и то же адресное пространство.
go list.Sort() //запускается list.Sort параллельно, без ожидания
Программа выводит сообщение «Hello from main goroutine». Она также может напечатать «Hello from another
goroutine», в зависимости от того, какая из двух горутин завершится первой.
func main() {
go fmt.Println("Hello from another goroutine")
fmt.Println("Hello from main goroutine")
// В этот момент выполнение программы останавливается и убиваются все
// активные горутины
}
Следующая программа скорее всего выведет «Hello from main goroutine» и «Hello from
another goroutine». Они могут появиться в любом порядке. Еще одна особенность
заключается в том, что вторая горутина работает очень медленно и не печатает сообщение до завершения программы.
func main() {
go fmt.Println("Hello from another goroutine")
fmt.Println("Hello from main goroutine")
time.Sleep(time.Second) // дадим другой гороутине время завершиться
}
Вот более реалистичный
пример, где определяется функция, которая использует concurrency для отсрочки
события:
// Publish печатает текст в stdout по истечении заданного времени.
// Он не блокируется и сразу же возвращается.
func Publish(text string, delay time.Duration) {
go func() {
time.Sleep(delay)
fmt.Println("BREAKING NEWS:", text)
}() // Обратите внимание на круглые скобки. Мы должны вызвать
// анонимную функцию.
}
Вот как вы можете
использовать функцию Publish:
func main() {
Publish("A goroutine starts a new thread.", 5*time.Second)
fmt.Println("Let’s hope the news will published before I leave.")
// Дожидаемся публикации новостей
time.Sleep(10 * time.Second)
fmt.Println("Ten seconds later: I’m leaving now.")
}
Скорее всего программа напечатает три строки в заданном порядке с пятисекундными перерывами между ними.
$ go run publish1.go
Let’s hope the news will published before I leave.
BREAKING NEWS: A goroutine starts a new thread.
Ten seconds later: I’m leaving now.
Невозможно реализовать
ожидание потоков в процессе «сна», но есть метод синхронизации – использование каналов.
Реализация
Горутины имеют небольшой вес и стоят немногим больше, чем выделение места в стеке. Место в куче выделяется и освобождается по мере необходимости.
Внутри горутины действуют
как корутины, которые мультиплексируются между несколькими потоками операционной
системы. Если одна горутина блокирует поток ОС, например, ожидая ввода, другие
горутины в этом потоке будут мигрировать, чтобы продолжать работать.
Каналы обеспечивают синхронизированную связь
Каналы – это механизм, с помощью которого горутины синхронизируют выполнение и обмениваются данными, передавая значения.
Новое значение канала
можно задать с помощью встроенной функции make.
// небуферизованный канал int-ов
ic := make(chan int)
// буферизованный канал на 10 строк
sc := make(chan string, 10)
Чтобы отправить значение в
канал, используйте бинарный оператор «<-», а для получения – унарный
оператор.
ic <- 3 // отправляем 3 в канал
n := <-sc // получаем строку из канала
Оператор задает
направление канала на отправку или получение. По умолчанию канал
является двунаправленным.
chan Sushi // может использоваться для отправки и получения значений типа Sushi
chan<- string // может использоваться только для отправки строк
<-chan int // может использоваться только для получения int
Буферизованные и небуферизованные каналы
- Если пропускная способность канала равна нулю или отсутствует, канал не буферизуется и отправитель блокируется до тех пор, пока получатель не получит значение.
- Если канал имеет буфер, отправитель блокируется только до тех пор, пока значение не будет скопировано в буфер. Если буфер заполнен, ждем пока какой-либо получатель не получит значение.
- Приемники всегда блокируются, пока не появятся данные для приема.
- Отправка или получение с nil-канала блокируется навсегда.
Закрытие канала
Функция закрытия помечает,
что никакие значения больше не будут отправляться по каналу. Обратите внимание,
что закрывать канал необходимо только в том случае, если приемник этого ожидает.
- После вызова
closeи после получения любых ранее отправленных значений, операции приема вернут нулевое значение без блокировки. - Операция приема множества значений дополнительно возвращает состояние канала.
- Отправка в закрытый канал или его закрытие, а также закрытие nil-канала, вызовут
run-time panic.
ch := make(chan string)
go func() {
ch <- "Hello!"
close(ch)
}()
fmt.Println(<-ch) // напечатает «Hello!»
fmt.Println(<-ch) // выведет нулевое значение «» без блокировки
fmt.Println(<-ch) // еще раз напечатает «»
v, ok := <-ch // v - это «», ok – false
// получать значения от ch до закрытия
for v := range ch {
fmt.Println(v) // не выполнится
}
Пример
В следующем примере функция
Publish вернет канал, который используется для броадкастинга сообщения после
публикации текста:
// Publish напечатает текст в stdout по истечении заданного времени.
// Когда текст будет опубликован, закрываем канал, который на «паузе».
func Publish(text string, delay time.Duration) (wait <-chan struct{}) {
ch := make(chan struct{})
go func() {
time.Sleep(delay)
fmt.Println(text)
close(ch)
}()
return ch
}
Обратите внимание: мы
используем канал пустых структур для указания, что канал будет использоваться
только для сигнализации, а не для передачи данных. Выглядит это так:
wait := Publish("important news", 2 * time.Minute)
// выполним что-нибудь
<-wait // в блоке, пока текст не будет опубликован
Select ожидает группы каналов
Оператор select
одновременно ожидает нескольких операций отправки или получения.
- Оператор блокируется до тех пор, пока одна из операций не будет разблокирована.
- Если выполняется несколько операций, то одна из них будет выбрана случайным образом.
// блокируется до тех пор, пока данные не появятся в ch1 или ch2
select {
case <-ch1:
fmt.Println("Received from ch1")
case <-ch2:
fmt.Println("Received from ch2")
}
Операции
отправки и приема в nil-канале
блокируются навсегда. Это можно использовать для отключения канала в инструкции
select:
ch1 = nil // отключает этот канал
select {
case <-ch1:
fmt.Println("Received from ch1") // не произойдет
case <-ch2:
fmt.Println("Received from ch2")
}
Вариант по умолчанию
Вариант по умолчанию будет выполнен, если все остальные заблокированы.
// никогда не заблокируется
select {
case x := <-ch:
fmt.Println("Received", x)
default:
fmt.Println("Nothing available")
}
Примеры
Бесконечная случайная двоичная последовательность
В качестве примера можно
использовать случайный выбор вариантов, которые могут генерировать случайные
биты.
rand := make(chan int)
for {
select {
case rand <- 0: // no statement
case rand <- 1:
}
}
Операция блокировки по таймауту
Функция time.After входит в стандартную библиотеку. Она ожидает истечения указанного
времени, а затем отправляет текущее время в возвращаемый канал:
select {
case news := <-AFP:
fmt.Println(news)
case <-time.After(time.Minute):
fmt.Println("Time out: No news in one minute")
}
Оператор select
блокируется до тех пор, пока по крайней мере один case не сможет выполниться. С нулевыми кейсами этого
никогда не произойдет:
select {}
Гонки данных
Гонка данных происходит, когда две горутины одновременно обращаются к одной и той же переменной и хотя бы одно из обращение является записью.
Такая ситуация возникает часто и может усложнить отладку.
Показанная ниже функция приводит к гонке данных, и ее поведение не определено – она может, например, напечатать число 1.
Попробуем выяснить, как это происходит:
func race() {
wait := make(chan struct{})
n := 0
go func() {
n++ // чтение, увеличение, запись
close(wait)
}()
n++ // конфликтующий доступ
<-wait
fmt.Println(n) // Вывод: <unspecified>
}
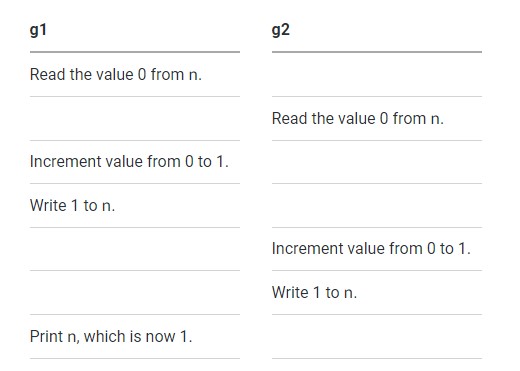
Две горутины g1 и g2,
участвуют в гонке, и нет никакого способа узнать, в каком порядке будут выполняться операции. Ниже приведен один из нескольких возможных вариантов:
Как избежать гонки данных?
Единственный способ избежать гонки – синхронизировать доступ ко всем mutable-данным, которые используются потоками совместно. Есть несколько способов добиться этого. В Go обычно используется канал или блокировка (низкоуровневые механизмы доступны в пакетах sync и sync/atomic).
Предпочтительный способ
обработки одновременного доступа к данным в Go – использовать канал для
передачи данных от одной горутины к следующей.
func sharingIsCaring() {
ch := make(chan int)
go func() {
n := 0 // Локальная переменная видна только для первой горутины
n++
ch <- n // Данные отправляются из первой горутины
}()
n := <-ch // ...и благополучно прибывают во вторую
n++
fmt.Println(n) // Вывод: 2
}
В этом коде канала происходят два события:
- передаются данные от одной горутины к другой – точка синхронизации;
- отправляющая горутина будет ждать, пока другая получит данные и наоборот.
Модель памяти Go довольно сложна: переменная в одной горутине может гарантированно наблюдать значения, полученные при записи в ту же переменную в другой горутине, но до тех пор, пока вы делитесь всеми mutable-данными между горутинами по каналам, вы защищены от гонки данных.
Как обнаружить гонку данных?
Гонки данных могут легко появляться, но обнаружить их трудно. К счастью среда выполнения Go может помочь и в этом. Используйте ключ -race для включения встроенного
детектора гонки данных.
$ go test -race [packages]
$ go run -race [packages]
Пример
Программа с гонкой
данных:
package main
import "fmt"
func main() {
i := 0
go func() {
i++ // запись
}()
fmt.Println(i) // конкурентное чтение
}
Запуск этой программы с
параметром -race покажет нам, что
существует гонка между записью в строке 7 и чтением в строке 9:
$ go run -race main.go
0
==================
WARNING: DATA RACE
Write by goroutine 6:
main.main.func1()
/tmp/main.go:7 +0x44
Previous read by main goroutine:
main.main()
/tmp/main.go:9 +0x7e
Goroutine 6 (running) created at:
main.main()
/tmp/main.go:8 +0x70
==================
Found 1 data race(s)
exit status 66
Подробности
Детектор гонки не выполняет никакого статического анализа. Он проверяет доступ к памяти во время выполнения только для фактически работающего кода.
Он работает на
darwin/amd64, freebsd/amd64, linux/amd64 и Windows/amd64.
Накладные расходы
варьируются, но обычно происходит увеличение использования памяти в 5-10 раз и
увеличение времени выполнения в 2-20 раз.
Как отлаживать deadlock-и
Дэдлоки возникают, когда горутины ждут друг друга и ни одна из них не может завершиться.
Взглянем на пример:
func main() {
ch := make(chan int)
ch <- 1
fmt.Println(<-ch)
}
Программа застрянет на
операции отправки, ожидая вечно, пока кто-то прочитает значение. Go способен
обнаруживать подобные ситуации во время выполнения. Вот результат нашей
программы:
fatal error: all goroutines are asleep - deadlock!
goroutine 1 [chan send]:
main.main()
.../deadlock.go:7 +0x6c
Советы по отладке
Горутина может застрять:
- когда она ждет канал;
- либо когда она ждет одну из блокировок в пакете sync.
Общие причины:
- ни одна горутина не имеет доступа к каналу или блокировке;
- горутины ждут друг друга.
Сейчас Go обнаруживает только зависание всей программы в целом, а не когда застревает некое подмножество горутин.
С помощью каналов легко
понять, что вызвало дедлок. С другой стороны, интенсивно
использующие мьютексы программы могут быть заведомо трудными для отладки.
Ожидание горутин
Группа sync.WaitGroup
ожидает завершения работы группы горутин:
var wg sync.WaitGroup
wg.Add(2)
go func() {
// Do work.
wg.Done()
}()
go func() {
// Do work.
wg.Done()
}()
wg.Wait()
- сначала основная горутина вызывает Add, чтобы установить количество ожидающих горутин;
- затем запускаются две новые горутины и вызывают Done при завершении.
В то же время Wait используется для блокировки до тех пор, пока эти две
горутины не завершатся.
Замечание: группа ожидания не должна копироваться после первого использования.
Трансляция сигнала по каналу
В этом примере функция
Publish возвращает канал, который используется для передачи сигнала при
публикации сообщения.
// печать текста по истечении заданного времени
// когда это будет выполнено, канал ожидания будет закрыт
func Publish(text string, delay time.Duration) (wait <-chan struct{}) {
ch := make(chan struct{})
go func() {
time.Sleep(delay)
fmt.Println("BREAKING NEWS:", text)
close(ch) // трансляция на все приемники
}()
return ch
}
Обратите внимание, что мы
используем канал пустых структур: struct{}. Это явно указывает на то, что канал предназначен только для сигнализации, а не для передачи данных.
Вот как можно это использовать:
func main() {
wait := Publish("Channels let goroutines communicate.", 5*time.Second)
fmt.Println("Waiting for news...")
<-wait
fmt.Println("Time to leave.")
}
Waiting for news...
BREAKING NEWS: Channels let goroutines communicate.
Time to leave.
Как убить горутину
Чтобы горутина остановилась,
ей необходимо прослушивать сигнал остановки на выделенном выходном канале и
проверять его.
quit := make(chan bool)
go func() {
for {
select {
case <-quit:
return
default:
// …
}
}
}()
// …
quit <- true
Вот более полный пример,
где используется один канал как для передачи данных, так и для сигнализации:
// генератор возвращает канал, который производит числа 1, 2, 3…
// чтобы остановить основную горутину, необходимо отправить
// номер этому каналу
func Generator() chan int {
ch := make(chan int)
go func() {
n := 1
for {
select {
case ch <- n:
n++
case <-ch:
return
}
}
}()
return ch
}
func main() {
number := Generator()
fmt.Println(<-number)
fmt.Println(<-number)
number <- 0 // остановка основной горутины
fmt.Println(<-numberм) // ошибка, больше никто не отправляет
}
1
2
fatal error: all goroutines are asleep - deadlock!
Timer и Ticker
Таймеры и тикеры
позволяют выполнять код по расписанию один или несколько раз.
Timeout (Timer)
time.After ожидает в течение заданного промежутка, а затем
отправляет текущее время по возвращаемому каналу:
select {
case news := <-AFP:
fmt.Println(news)
case <-time.After(time.Hour):
fmt.Println("No news in an hour.")
}
time.Timer не будет обработан сборщиком мусора до тех пор, пока
таймер не сработает. Используйте time.NewTimer вместо
вызова метода Stop, когда таймер больше не нужен:
for alive := true; alive; {
timer := time.NewTimer(time.Hour)
select {
case news := <-AFP:
timer.Stop()
fmt.Println(news)
case <-timer.C:
alive = false
fmt.Println("No news in an hour. Service aborting.")
}
}
Repeat (Ticker)
time.Tick возвращает
канал, который обеспечивает тиканье часов с четными интервалами:
go func() {
for now := range time.Tick(time.Minute) {
fmt.Println(now, statusUpdate())
}
}()
time.Ticker не будет обработан сборщиком мусора до тех пор, пока
таймер не сработает. Используйте time.NewTicker вместо
вызова метода Stop, когда тикер больше не нужен:
func Foo() {
timer = time.AfterFunc(time.Minute, func() {
log.Println("Foo run for more than a minute.")
})
defer timer.Stop()
// Do heavy work
}
Блокировка взаимного исключения (мьютекс)
Иногда удобнее
синхронизировать доступ к данным с помощью явной блокировки, а не с помощью
каналов. Стандартная библиотека Go предлагает для этой цели блокировку
взаимного исключения sync.Mutex.
Используйте с осторожностью
Чтобы этот тип блокировки был безопасным, крайне важно, чтобы все обращения к общим данным выполнялись только тогда, когда горутина находится в блокировке. Одной ошибки в одной горутине достаточно, чтобы ввести гонку данных и сломать программу.
Из-за этого вам следует
подумать о разработке кастомной структуры данных с чистым API и убедиться, что вся синхронизация выполняется внутри.
В этом примере мы создаем
безопасную и простую в использовании конкурентную структуру данных AtomicInt, в которой хранится integer. Любое количество горутин
может безопасно получить доступ к этому числу с помощью методов Add и Value.
// AtomicInt – это параллельная структура данных, содержащая int
// его значение равно 0
type AtomicInt struct {
mu sync.Mutex // блокировка может удерживаться одной горутиной за раз
n int
}
// добавляет n к AtomicInt
func (a *AtomicInt) Add(n int) {
a.mu.Lock() // ждем пока блокировка освободится
a.n += n
a.mu.Unlock() // освобождение блокировки
}
// Value возвращает значение a
func (a *AtomicInt) Value() int {
a.mu.Lock()
n := a.n
a.mu.Unlock()
return n
}
func main() {
wait := make(chan struct{})
var n AtomicInt
go func() {
n.Add(1) // один доступ
close(wait)
}()
n.Add(1) // другой конкурентный доступ
<-wait
fmt.Println(n.Value()) // 2
}
Заключение
Мы рассмотрели распространенные проблемы, относящиеся к конкурентности в Go. Это не весь материал по теме – остальное вам придется
самостоятельно изучать на официальном сайте. Не ленитесь, развивайтесь и удачи в обучении!
Дополнительные материалы:
- Где используется язык программирования Go?
- Конкурентность в Golang и WorkerPool [Часть 2]
- Golang против Python: какой язык программирования выбрать?
- Язык Go: как стать востребованным программистом
Содержание
- All goroutines are asleep — deadlock! ——- Error
- 2 Answers 2
- all goroutines are asleep — deadlock
- 3 Answers 3
- Getting «fatal error: all goroutines are asleep — deadlock!» when using sync.WaitGroup
- 2 Answers 2
- Linked
- Related
- Hot Network Questions
- Subscribe to RSS
- GO language: fatal error: all goroutines are asleep — deadlock
- 3 Answers 3
- Deadlocks, Livelocks и Starvation
- Deadlocks, Livelocks и Starvation
- Продолжаем серию статей о проблемах многопоточности, параллелизме, concurrency и других интересных штуках. Race…
- Deadlock
- Что такое deadlock и как избежать таких ошибок?
- Пример
- Условия Коффмана
- Диаграммы Холта (Holt).
- Критерий deadlock.
- Livelock
- Starvation
- Пример
All goroutines are asleep — deadlock! ——- Error
I want to write three concurrent go routines that sends integers to each other. Now, my code is compiled properly, however after first execution it gives error «all goroutines are asleep — deadlock!». I tried to find the error but I could not able to find any error in code logic.Can anybody help me to find the mistake with my code. My code is given below. Thanks in advance.
Can anyone inform me why if I declare Routine2 and Routine3 as go routine, why the output is [no output]. I am new in GO and as per I understood from «http://golang.org/doc/effective_go.html#concurrency», go is used for executing goroutine in parallel with other goroutines in the same address space. So, what is the problem, that all routines are running but output is [no output].
To make program more clear: What actually I am tiring to do is creating two channels between each two routines and then use one channel to send int to other channel and receive int by another channel from that routine. For example between routine 1 & 3 channels are command13 & response13. routine 1 uses command13 to send int and response13 to receive int to/from routine 3.For routine 3 response13 used to send int and command13 to receive int to/from routine 1 (command/response 13 represents channel between routine 1 and 3).Now, as three routines are concurrent and they have specific routines to handle received msg or sending msg, why they go to deadlock ?
2 Answers 2
This will start Routine1 in a new goroutine, and the main goroutine will continue with the next statement. Therefore, Routine1 and Routine2 will be executed concurrently, but Routine3 will be started after Routine2 has finished. You might miss another «go» statement here.
Then, I was trying to follow your program. In Routine1 you do
This will block Routine1 until there is another goroutine ready which is able to receive your message. So you need a y := in another goroutine.
But now, lets look closely at the parameter of the other two goroutines:
As you can see, none of the goroutines has access to command13 (but you are passing command12 twice). So, neither Routine1 nor Routine2 or Routine3 is able to continue. Deadlock!
I would recommend you to go back to the drawing board. Think about what you are trying to do first, draw some diagrams about the expected flow of messages and then, try to implement that behavior.
It’s really hard to debug your program at the moment since,
- I do not know what you are trying to do. There is no detailed description about the message flow or anything like that. In fact, your code doesn’t contain any documentation at all.
- You are passing channels which are called response23 to a parameter called response13 and so on. It’s quite easy to mix them up.
- All those generic names like command12 etc. make it hard to understand what this channel is supposed to do
- It’s a good idea to gofmt your source code before you post it 🙂
As a starting point, I can recommend you the «Prime Numbers» example form the Go tutorial. In this example, possible prime numbers are passed from one goroutine to another. Additionally, this example also contains some nice graphics about the message flow as well as some really good explanations. You might like it.
Источник
all goroutines are asleep — deadlock
For one of my requirement I have to create N number of worker go routines, which will be monitored by one monitoring routine. monitoring routine has to end when all worker routines completes. My code ending in deadlock, please help.
3 Answers 3
Your monitorWorker never dies. When all the workers finish, it continues to wait on cs. This deadlocks because nothing else will ever send on cs and therefore wg will never reach 0. A possible fix is to have the monitor close the channel when all workers finish. If the for loop is in main, it will end the loop, return from main, and end the program.
Edit: This is an answer to OP’s first comment.
Your program has three parts that need to synchronize. First, all of your workers need to send the data. Then your print loop needs to print that data. Then your main function needs to return thereby ending the program. In your example, all the workers send the data, all the data gets printed, but the message is never sent to main that it should return gracefully.
In my example, main does the printing and «monitorWorker» just tells main when it has received every piece of data it needs to print. This way the program ends gracefully and not by deadlock.
If you insist on the print loop being in another goroutine, you can do that. But then an extra communication needs to be sent to main so it returns. In this next example, I use a channel to ensure main ends when all data is printed.
Источник
Getting «fatal error: all goroutines are asleep — deadlock!» when using sync.WaitGroup
I’m trying to spin off a set of goroutines, and then wait for them all to finish.
However when I run this code I get the following error:
2 Answers 2
You need to pass a pointer to the WaitGroup, and not the WaitGroup object. When you pass the actual WaitGroup, Go makes a copy of the value, and calls Done() on the copy. The result is the original WaitGroup will have ten Add’s and no Done’s, and each copy of the WaitGroup will have one Done() and however many Add’s were there when the WaitGroup was passed to the function.
Pass a pointer instead, and every function will reference the same WaitGroup.
As @Kevin mentioned, you will need to pass a reference to your WaitGroup . This is actually the one thing I do not like about WaitGroup because you would be mixing your concurrency logic with your business logic.
So I came up with this generic function to solve this problem for me:
Here is an example:
If you would like to use it, you can find it here https://github.com/shomali11/util

Linked
Hot Network Questions
To subscribe to this RSS feed, copy and paste this URL into your RSS reader.
Site design / logo © 2023 Stack Exchange Inc; user contributions licensed under CC BY-SA . rev 2023.1.16.43160
By clicking “Accept all cookies”, you agree Stack Exchange can store cookies on your device and disclose information in accordance with our Cookie Policy.
Источник
GO language: fatal error: all goroutines are asleep — deadlock
Code below works fine with hard coded JSON data however doesn’t work when I read JSON data from a file. I’m getting fatal error: all goroutines are asleep — deadlock error when using sync.WaitGroup .
WORKING EXAMPLE WITH HARD-CODED JSON DATA:
OUTPUT:
NOT WORKING — EXAMPLE WITH READING JSON DATA FILE:
OUTPUT
HOSTS.TXT

3 Answers 3
Go program ends when the main function ends.
Program execution begins by initializing the main package and then invoking the function main. When that function invocation returns, the program exits. It does not wait for other (non-main) goroutines to complete.
Therefore, you need to wait for your goroutines to finish. The common solution for this is to use sync.WaitGroup object.
The simplest possible code to synchronize goroutine:
And for synchronizing multiple goroutines
WaitGroup usage in order of execution.
- Declaration of global variable. Making it global is the easiest way to make it visible to all functions and methods.
- Increasing the counter. This must be done in main goroutine because there is no guarantee that newly started goroutine will execute before 4 due to memory model guarantees.
- Decreasing the counter. This must be done at the exit of goroutine. Using deferred call, we make sure that it will be called whenever function ends no matter but no matter how it ends.
- Waiting for the counter to reach 0. This must be done in main goroutine to prevent program exit.
Источник
Deadlocks, Livelocks и Starvation
Продолжаем серию статей о проблемах многопоточности, параллелизме, concurrency и других интересных штуках.
Deadlocks, Livelocks и Starvation
Продолжаем серию статей о проблемах многопоточности, параллелизме, concurrency и других интересных штуках. Race…
В 1965 году Эдсгер Дейкстра сформулировал задачу об обедающих философах. Задача была иллюстрацией проблем синхронизации при разработке параллельных алгоритмов и техник решения этих проблем.
В задачи были рассмотренный такие проблема, как deadlock, livelock, resource starvation.
Саму задачу и возможные решения можно посмотреть на wiki.
А мы рассмотрим проблемы синхронизации в контексте современных языков программирования.
Deadlock
Что такое deadlock и как избежать таких ошибок?
Deadlock или взаимная блокировка — это ошибка, которая происходит когда процессы имеют циклическую зависимость от пары синхронизированных объектов.
Deadlock — это программа, в которой все параллельные процессы ожидают друг друга. В этом состоянии программа никогда не восстановится без вмешательства извне.
Пример
fatal error: all goroutines are asleep — deadlock!
Отладка взаимных блокировок, как и других ошибок синхронизации, усложняется тем, что для их возникновения нужны специфические условия одновременного выполнения нескольких процессов. Если бы Процесс 1 успел захватить ресурс B до Процесса 2, то ошибка не произошла бы.
Но все не так плохо, оказывается, есть несколько условий, которые должны присутствовать для возникновения взаимных блокировок, и в 1971 году Эдгар Коффман перечислил эти условия в своей статье System Deadlocks. Условия теперь известны как условия Кофмана и являются основой для методов, которые помогают обнаруживать, предотвращать и исправлять взаимные блокировки.
Условия Коффмана
- Условие взаимного исключения. Каждый ресурс в данный момент или отдан ровно одному процессу, или доступен.
- Условие удержания и ожидания. Процессы, в данный момент удерживающие полученные ранее ресурсы, могут запрашивать новые ресурсы.
- Условие отсутствия принудительной выгрузки ресурса. У процесса нельзя принудительным образом забрать ранее полученные ресурсы. Процесс, владеющий ими, должен сам освободить ресурсы.
- Условие циклического ожидания. Должна существовать круговая последовательность из двух и более процессов, каждый из которых ждет доступа к ресурсу, удерживаемому следующим членом последовательности.
Указанные условия являются необходимыми. То есть, если хоть одно из них не выполняется, то взаимных блокировок никогда не возникнет. Достаточность не имеет места быть: если выполняются все четыре условия, блокировка может и не произойти, например, если в системе нет процессов, претендующих на одновременное использование одних и тех же ресурсов.
Диаграммы Холта (Holt).
Отслеживать возникновение взаимных блокировок удобно на диаграммах Холта (Holt). Диаграмма Холта представляет собой направленный граф, имеющий два типа узлов: процессы (показываются кружочками) и ресурсы (показываются квадратиками). Тот факт, что ресурс получен процессом и в данный момент занят этим процессом, указывается ребром (стрелкой) от ресурса к процессу. Ребро, направленное от процесса, к ресурсу, означает, что процесс в данный момент блокирован и находится в состоянии ожидания доступа к соответствующему ресурсу.
Критерий deadlock.
Deadlock имеет место быть, тогда и только тогда, когда диаграмма Холта, отражающая состояния процессов и ресурсов, содержит цикл .
Livelock
Livelock— это программы, которые активно выполняют параллельные операции, но эти операции никак не влияют на продвижение состояния программы вперед.
Ситуация, в которой два или более процессов непрерывно изменяют свои состояния в ответ на изменения в других процессах без какой-либо полезной работы. Это похоже на deadlock, но разница в том, что процессы становятся “ вежливыми” и позволяют другим делать свою работу.
Выполнение алгоритмов поиска удаления взаимных блокировок может привести к livelock — взаимная блокировка образуется, сбрасывается, снова образуется, снова сбрасывается и так далее.
Жизненный пример такой ситуации:
Двое встречаются лицом к лицу. Каждый из них пытается посторониться, но они не расходятся, а несколько секунд сдвигаются в одну и ту же сторону.
Вы делаете телефонный звонок, но человек на другом конце тоже пытается вам позвонить. Вы оба повесите трубку и попробуйте снова через одно и то же время, что снова создаст такую же ситуацию. Это может продолжаться вечность.
Рассмотрим простой пример livelock, где муж и жена пытаются поужинать, но между ними только одна ложка. Каждый из супругов слишком вежлив, и передает ложку, если другой еще не ел.
Ложка у которой есть хозяин:
Процесс обеда. Ложка и партнер:
Обедаем пока не утолим голод( isHungry=false ).
- Если ложка сейчас не у нас, то подождем
- Если супруг(а) голодна, то уступим и передадим ложку ему/ей
- Используем ложку и наконец-то обедаем
Поесть этим милым людям не суждено. До третьего блока выполнение не дойдет.
На мой взгляд, обнаружить livelock труднее, чем deadlock, просто потому, что может показаться, что программа работает. Она может реагировать на сигналы, потреблять ресурсы и как то менять состояния, но выйти из цикла и завершить работу уже не в состоянии.
Livelock— это подмножество более широкого набора проблем, называемых Starvation.
Starvation
Starvation — это любая ситуация, когда параллельный процесс не может получить все ресурсы, необходимые для выполнения его работы.
При livelock все параллельные процессы одинаково “голодают”, и никакая работа не выполняется до конца.
В более широком смысле starvation обычно подразумевает наличие одного или нескольких параллельных процессов, которые несправедливо мешают одному или нескольким другим параллельным процессам выполнять работу настолько эффективно, насколько это возможно.
Пример
У нас будет два работника. Один жадный( greedyWorker ), другой вежливый( politeWorker ). Обоим дается одинаковое кол-во времени на их полезную работу — спать по 3 наносекунде.
greedyWorker жадно удерживает общий ресурс( sharedLock ) на протяжении всего цикла работы, тогда как politeWorker пытается блокировать его только тогда, когда это необходимо.
Результат их работы:
За одно и то же время, жадный работник получил почти вдвое больше возможностей выполнять свою работу и владеть общим ресурсом.
Конечно, lockunlock медленные и в данном примере у politeWorker очень неэффективный код, но голодания может также применяться к процессору, памяти, файловым дескрипторам, соединениям с бд, к любому ресурсу, который должен использоваться совместно.
Если у вас есть параллельный процесс, который настолько жаден, что препятствует эффективно работать другим параллельным процессам, то у вас большая проблема.
Источник