There is one component of your question that remains unanswered:
I wish to use the Arduino IDE to edit the libraries but it seems it is not easy, maybe in future reales it is supported.
Any good editor if Arduino IDE is not an option? Why is not an option?
The rest of your questions already have good answers so I’ll limit myself to explaining how the Arduino IDE 1.6.5-r4 and newer can be used to edit libraries:
Copy the library you want to modify to {sketchbook folder}/libraries or create a new folder at that location if you’re writing a library from scratch. You can find the location of {sketchbook folder} at File > Preferences > Sketchbook location.
Create a file that matches the folder name that contains the source files with the .ino extension. For example:
{sketchbook folder}
|_libraries
|_FooBar
|_FooBar.ino
|_FooBar.h
|_FooBar.cpp
or:
{sketchbook folder}
|_libraries
|_FooBar
|_library.properties
|_src
|_src.ino
|_FooBar.h
|_FooBar.cpp
This dummy .ino file is necessary in order to open the library source files in the Arduino IDE but will not actually be used as part of the library. You can leave it blank. I like to use this file as a «to-do» list for my development work. I add this filename to .git/info/exclude so that it will not be tracked as part of the repository. It’s also possible to use this file as a sketch to test the library with. Just remember to use the local file include style:
#include "FooBar.h"
Note that you will only be able to edit the files that are in the same folder as the .ino file via the Arduino IDE. Luckily most Arduino libraries place all their source files in a single folder so this is not much of a limitation. If you wanted to edit a library that has source files in multiple folders you could always put a dummy .ino file in each folder and open them in separate IDE windows.
Add a file named .development to the library root folder. This is necessary because normally the Arduino IDE does not allow saving to the library folders or the examples folder to prevent accidental modification of the example sketches. Using Windows Explorer (and possibly others), you will find that you are not allowed to create files that start with a dot. You can create the .development file using a text editor or the command line. The contents of the file don’t matter, only the presence of the file. Note that you should not publish the .development file to repositories that will be included in the Arduino IDE Library Manager as the file will cause the library to be skipped by the job that fetches releases. I also add this filename to .git/info/exclude.
If the library does not already contain one, add a library.properties file to the library root folder. You can find the correct format of this file in the Arduino Library Specification:
https://github.com/arduino/Arduino/wiki/Arduino-IDE-1.5:-Library-specification#libraryproperties-file-format
Now the structure of the example libraries above would look like this:
{sketchbook folder}
|_libraries
|_FooBar
|_.development
|_FooBar.ino
|_FooBar.h
|_FooBar.cpp
|_library.properties
or:
{sketchbook folder}
|_libraries
|_FooBar
|_.development
|_library.properties
|_src
|_src.ino
|_FooBar.h
|_FooBar.cpp
Restart the Arduino IDE if it’s running.
After doing this, when you open any of the source files of the library with the Arduino IDE, all source files in the folder will be opened and you can edit and save them as you would a sketch.
There is one component of your question that remains unanswered:
I wish to use the Arduino IDE to edit the libraries but it seems it is not easy, maybe in future reales it is supported.
Any good editor if Arduino IDE is not an option? Why is not an option?
The rest of your questions already have good answers so I’ll limit myself to explaining how the Arduino IDE 1.6.5-r4 and newer can be used to edit libraries:
Copy the library you want to modify to {sketchbook folder}/libraries or create a new folder at that location if you’re writing a library from scratch. You can find the location of {sketchbook folder} at File > Preferences > Sketchbook location.
Create a file that matches the folder name that contains the source files with the .ino extension. For example:
{sketchbook folder}
|_libraries
|_FooBar
|_FooBar.ino
|_FooBar.h
|_FooBar.cpp
or:
{sketchbook folder}
|_libraries
|_FooBar
|_library.properties
|_src
|_src.ino
|_FooBar.h
|_FooBar.cpp
This dummy .ino file is necessary in order to open the library source files in the Arduino IDE but will not actually be used as part of the library. You can leave it blank. I like to use this file as a «to-do» list for my development work. I add this filename to .git/info/exclude so that it will not be tracked as part of the repository. It’s also possible to use this file as a sketch to test the library with. Just remember to use the local file include style:
#include "FooBar.h"
Note that you will only be able to edit the files that are in the same folder as the .ino file via the Arduino IDE. Luckily most Arduino libraries place all their source files in a single folder so this is not much of a limitation. If you wanted to edit a library that has source files in multiple folders you could always put a dummy .ino file in each folder and open them in separate IDE windows.
Add a file named .development to the library root folder. This is necessary because normally the Arduino IDE does not allow saving to the library folders or the examples folder to prevent accidental modification of the example sketches. Using Windows Explorer (and possibly others), you will find that you are not allowed to create files that start with a dot. You can create the .development file using a text editor or the command line. The contents of the file don’t matter, only the presence of the file. Note that you should not publish the .development file to repositories that will be included in the Arduino IDE Library Manager as the file will cause the library to be skipped by the job that fetches releases. I also add this filename to .git/info/exclude.
If the library does not already contain one, add a library.properties file to the library root folder. You can find the correct format of this file in the Arduino Library Specification:
https://github.com/arduino/Arduino/wiki/Arduino-IDE-1.5:-Library-specification#libraryproperties-file-format
Now the structure of the example libraries above would look like this:
{sketchbook folder}
|_libraries
|_FooBar
|_.development
|_FooBar.ino
|_FooBar.h
|_FooBar.cpp
|_library.properties
or:
{sketchbook folder}
|_libraries
|_FooBar
|_.development
|_library.properties
|_src
|_src.ino
|_FooBar.h
|_FooBar.cpp
Restart the Arduino IDE if it’s running.
After doing this, when you open any of the source files of the library with the Arduino IDE, all source files in the folder will be opened and you can edit and save them as you would a sketch.
Библиотеки являются очень мощным инструментом при работе с Ардуино, особенно для новичка. Библиотека является файлом (набором файлов), содержащим точно такой же С++ код, на котором мы пишем скетч. Мы можем подключить библиотеку в свой код и использовать возможности, которые она даёт, а вариантов там весьма много: готовые “инструменты” для работы с внешними датчиками и модулями, для работы с внутренней периферией микроконтроллера (таймеры, АЦП, память), библиотеки различных математических инструментов и многое многое другое. Мой личный список интересных библиотек, составленный за годы работы с платформой, можно посмотреть здесь.
Прелесть работы с библиотекой заключается в том, что нам необязательно знать, каким образом работает код внутри неё, мы просто пользуемся готовыми инструментами, которые предоставил разработчик. Очень часто к библиотекам есть описание/документация и примеры использования.
Хотите написать свою библиотеку? Читайте урок.
Как установить библиотеку
Как я уже говорил, библиотека это набор текстовых файлов с кодом. Библиотеку можно установить двумя способами: из официального репозитория или вручную. У Ардуино есть своя база библиотек (около 4000), которые можно устанавливать и обновлять прямо из Arduino IDE при помощи встроенного менеджера библиотек. Это удобно, но в этом списке есть не все существующие библиотеки. Переходим в Скетч/Подключить библиотеку/Управлять библиотеками… Откроется менеджер библиотек, в котором можно найти и в один клик установить библиотеку из списка. 
Ручная установка библиотеки подразумевает перемещение папки с библиотекой в папку, в которой Arduino IDE будет эту библиотеку искать. Таких папок две: одна находится в папке с программой:
- 64-битная версия Windows – C:Program Files (x86)Arduinolibraries
- 32-битная версия Windows – C:Program FilesArduinolibraries
Вторая находится по пути, указанному в настройках. По умолчанию это Документы/Arduino. Я рекомендую устанавливать библиотеки в папку с программой, так как этот путь не содержит кириллицы и проблем с ним никогда не возникнет. Перемещать библиотеку в папку библиотек нужно так, чтобы в папке с названием библиотеки были файлы библиотеки (файлы с расширениями .h, .cpp, файл keywords, папка examples…). 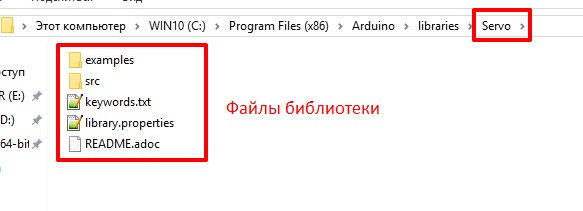
Библиотеку можно разместить в папке со скетчем, например если в код библиотеки вносятся изменения, необходимые только для этого проекта. В этом случае рядом с файлом скетча .ino должны лежать файлы библиотеки, а в скетче подключать библиотеку необходимо через двойные кавычки, чтобы компилятор начал искать библиотеку с папки со скетчем: 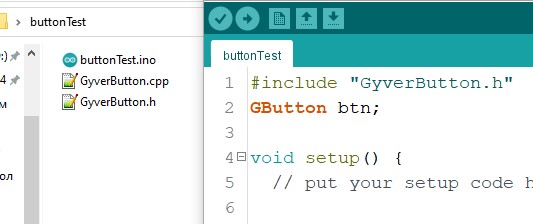
В то же время библиотеки, содержащие несколько файлов в разных папках, таким образом работать отказываются. Возможно это проблема самой IDE: 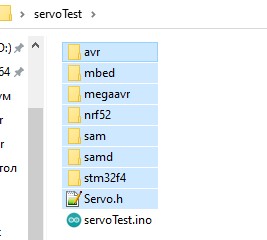
Где брать библиотеки?
Очень часто можно встретить опубликованный кем-то проект, в котором используются библиотеки. Автор может приложить непосредственно файлы библиотек, которые он использовал, может дать ссылку на библиотеку, или просто указать её название. Также интересные библиотеки попадаются на форумах, где люди просто написали для себя и поделились с другими. На официальном сайте библиотеки или на её странице на GitHub можно встретить подробное описание, советы по использованию, схемы и другую полезную информацию.
Большинство библиотек публикуется на GitHub, у неподготовленного человека могу возникнуть проблемы со скачиванием файлов с этого ресурса. Допустим, вы наткнулись на какую-то интересную библиотеку и захотели её скачать. Например, IRLremote – библиотека для работы с ИК приёмниками. Неважно, в какую папку репозитория вы попали – всегда можно нажать на название библиотеки (Имя автора/Название репозитория) и попасть на главную страницу: С главной страницы можно скачать весь репозиторий как архив, нажав Clone or download, затем Download ZIP. Данный способ универсален для всех библиотек.
С главной страницы можно скачать весь репозиторий как архив, нажав Clone or download, затем Download ZIP. Данный способ универсален для всех библиотек. 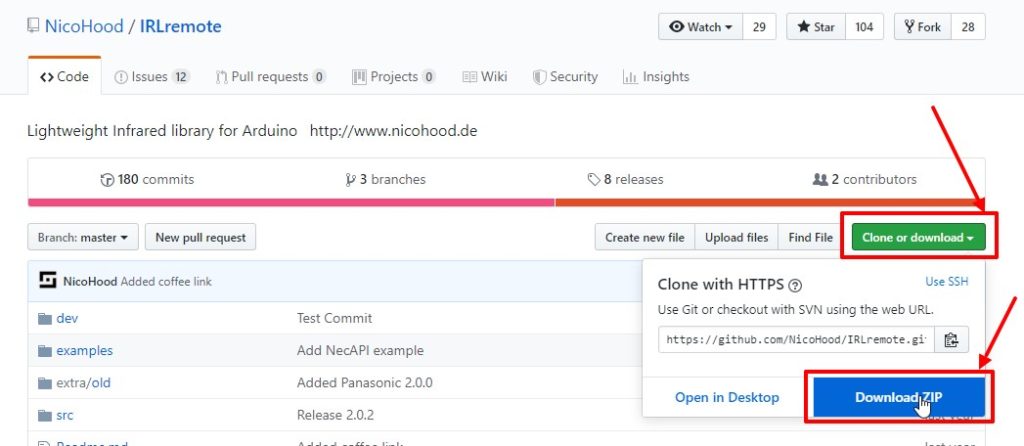
Таким образом вы скачаете исходный код библиотеки, в котором могут быть не относящиеся к самой библиотеке файлы. Большинство авторов выпускают релизы, которые находятся во вкладке Releases: 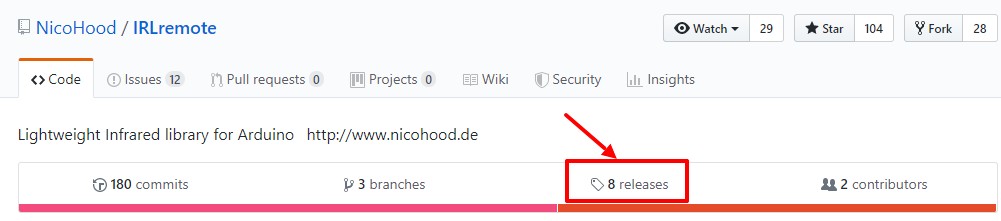 Со вкладки Releases можно загрузить архив с библиотекой нужной версии
Со вкладки Releases можно загрузить архив с библиотекой нужной версии 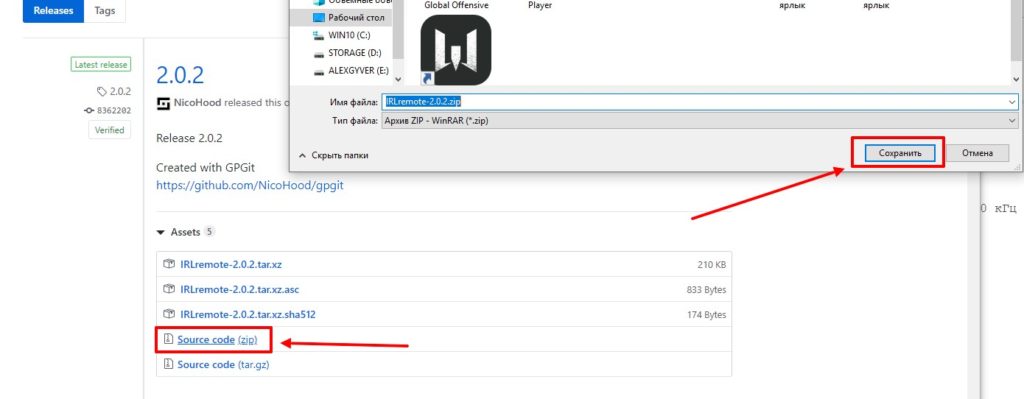 Также GitHub позволяет открыть для чтения или скачать единичный файл из репозитория. Для этого нужно открыть файл и нажать кнопку Raw
Также GitHub позволяет открыть для чтения или скачать единичный файл из репозитория. Для этого нужно открыть файл и нажать кнопку Raw 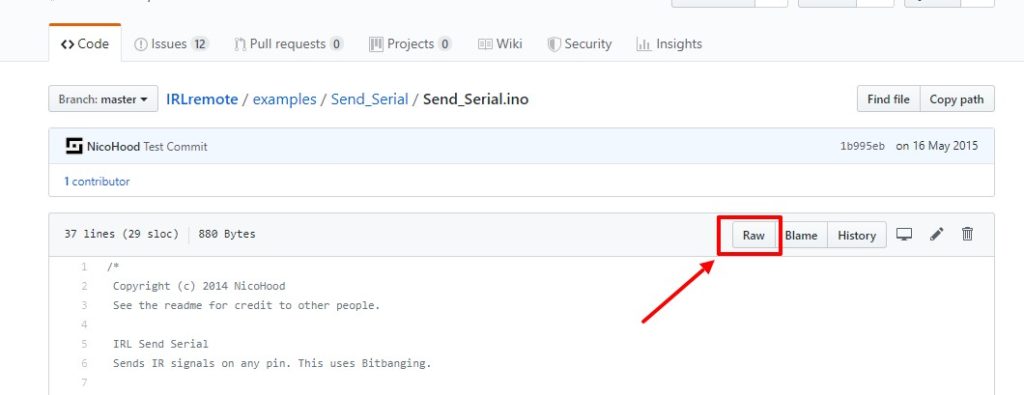
Решение конфликтов
Если Arduino IDE найдёт на компьютере несколько одинаковых библиотек, будет конфликт. Об этом сообщается в логе компиляции предупреждением: “несколько библиотек найдено… используется то, не используется сё“. Если вы ставили некоторые библиотеки через менеджер, они будут воевать с библиотеками, установленными вручную в папку с программой. Где вообще лежат библиотеки?
- Стандартные общие библиотеки – в папке с программой/libraries
- 64-битная версия Windows – C:Program Files (x86)Arduinolibraries
- 32-битная версия Windows – C:Program FilesArduinolibraries
- Установленные через менеджер – ДокументыArduinolibraries
- Библиотеки для конкретного ядра:
- Стандартное ядро Arduino – C:Program Files (x86)Arduinohardwarearduinoavrlibraries
- Другие ядра – C:UsersusernameAppDataLocalArduino15packagesядроhardwareплатформаверсияlibraries
Конфликтовать могут и ядра, поэтому решением всех проблем может стать чистая установка Arduino IDE с удалением остатков от предыдущей версии. Удаляем программу через “Установку и удаление программ” и вручную сносим папки:
- Папка с программой
- 64-битная версия Windows – C:Program Files (x86)Arduinolibraries
- 32-битная версия Windows – C:Program FilesArduinolibraries
- ДокументыArduino
- C:UsersusernameAppDataLocalArduino15
“Внутри” библиотеки
Библиотека, в зависимости от объема кода и настроения программиста, может быть оформлена как очень компактно, так и подробно, с кучей файлов и дополнительных папок. Рассмотрим классический состав библиотеки. Для удобства работы рекомендую включить видимость расширений файлов (Windows).
Все перечисленные ниже файлы являются обычными текстовыми файлами, открыть их можно обычным блокнотом. Рекомендую использовать “блокнот программиста” – Notepad++ (ссылка на официальный сайт), который подсвечивает синтаксис и в целом является очень удобным инструментом разработчика.
- название_библиотеки.h – заголовочный файл, самый главный файл библиотеки. Он настолько главный, что библиотека может состоять только из него одного. Находится обычно в корне библиотеки, либо в папке src (source, исходник). В этом файле обычно перечислены все классы/методы/функции/типы данных, находится информация о библиотеке, часто встречается расширенное описание для каждого метода или функции. Часто заголовочный файл является мини-документацией на библиотеку.
- Файл с расширением .cpp – файл реализаци, в котором находится основной исполнительный код программы. Обычно идёт парой к своему заголовочному .h файлу, т.е. название_библиотеки.cpp.
- keywords.txt – файл, в котором перечислены подсвечиваемые в коде названия функций, методов и прочих рабочих имён библиотеки.
- Файл library.properties содержит информацию о библиотеке для менеджера библиотек (название, версия, автор, категория и проч.)
- Папка src – в этой папке могут находиться основные файлы библиотеки (.h, .cpp, .c).
- Папка examples – папка с примерами использования библиотеки. Помимо перечисленных файлов и папок в папке с библиотекой могут находиться и другие служебные файлы и папки, иногда можно встретить даже полную документацию в виде текстовых файлов или html страниц.
Как работать с библиотекой?
Допустим, вы купили какой то модуль или датчик, загуглили по нему информацию, нашли статью с примером. Примеры обычно простенькие, показать как подключается и работает. Скачали библиотеку из статьи, попробовали, всё работает. Что дальше? Дальше следует открыть папку с библиотекой и посмотреть официальные примеры, разобраться как они работают и что умеют. Примеры находятся в папке examples в папке с библиотекой. Примеры обычно не раскрывают всех возможностей библиотеки, поэтому открываем и читаем заголовочный файл, который название_библиотеки.h. В нем можно найти буквально список инструментов библиотеки, очень часто с описанием для каждого. Вооружившись этой информацией, можно выжать из инструмента все возможности, которые ему прописал разработчик библиотеки.
Давайте рассмотрим стандартную библиотеку Servo, я думаю большинство с ней уже работали (смотри мой видеоурок по работе с Servo). Посмотрим примеры, которые лежат в папке с библиотекой:
Knob.ino
/*
Controlling a servo position using a potentiometer (variable resistor)
by Michal Rinott <http://people.interaction-ivrea.it/m.rinott>
modified on 8 Nov 2013
by Scott Fitzgerald
http://www.arduino.cc/en/Tutorial/Knob
*/
#include <Servo.h>
Servo myservo; // create servo object to control a servo
int potpin = 0; // analog pin used to connect the potentiometer
int val; // variable to read the value from the analog pin
void setup() {
myservo.attach(9); // attaches the servo on pin 9 to the servo object
}
void loop() {
val = analogRead(potpin); // reads the value of the potentiometer (value between 0 and 1023)
val = map(val, 0, 1023, 0, 180); // scale it to use it with the servo (value between 0 and 180)
myservo.write(val); // sets the servo position according to the scaled value
delay(15); // waits for the servo to get there
}
Sweep.ino
/* Sweep
by BARRAGAN <http://barraganstudio.com>
This example code is in the public domain.
modified 8 Nov 2013
by Scott Fitzgerald
http://www.arduino.cc/en/Tutorial/Sweep
*/
#include <Servo.h>
Servo myservo; // create servo object to control a servo
// twelve servo objects can be created on most boards
int pos = 0; // variable to store the servo position
void setup() {
myservo.attach(9); // attaches the servo on pin 9 to the servo object
}
void loop() {
for (pos = 0; pos <= 180; pos += 1) { // goes from 0 degrees to 180 degrees
// in steps of 1 degree
myservo.write(pos); // tell servo to go to position in variable 'pos'
delay(15); // waits 15ms for the servo to reach the position
}
for (pos = 180; pos >= 0; pos -= 1) { // goes from 180 degrees to 0 degrees
myservo.write(pos); // tell servo to go to position in variable 'pos'
delay(15); // waits 15ms for the servo to reach the position
}
}
Из этих примеров мы узнали, что есть класс Servo, и нужно создать объект этого класса. В блоке setup() мы можем указать, к какому пину подключена серво (метод attach()), и можем повернуть серво на нужный угол (в градусах) при помощи метода write(). Это в принципе всё, что мы узнали из официального примера.
Теперь откроем заголовочный файл Servo.h, который находится в папке src:
Servo.h
#define Servo_VERSION 2 // software version of this library
#define MIN_PULSE_WIDTH 544 // the shortest pulse sent to a servo
#define MAX_PULSE_WIDTH 2400 // the longest pulse sent to a servo
#define DEFAULT_PULSE_WIDTH 1500 // default pulse width when servo is attached
#define REFRESH_INTERVAL 20000 // minumim time to refresh servos in microseconds
#define SERVOS_PER_TIMER 12 // the maximum number of servos controlled by one timer
#define MAX_SERVOS (_Nbr_16timers * SERVOS_PER_TIMER)
#define INVALID_SERVO 255 // flag indicating an invalid servo index
#if !defined(ARDUINO_ARCH_STM32F4)
typedef struct {
uint8_t nbr :6 ; // a pin number from 0 to 63
uint8_t isActive :1 ; // true if this channel is enabled, pin not pulsed if false
} ServoPin_t ;
typedef struct {
ServoPin_t Pin;
volatile unsigned int ticks;
} servo_t;
class Servo
{
public:
Servo();
uint8_t attach(int pin); // attach the given pin to the next free channel, sets pinMode, returns channel number or 0 if failure
uint8_t attach(int pin, int min, int max); // as above but also sets min and max values for writes.
void detach();
void write(int value); // if value is < 200 its treated as an angle, otherwise as pulse width in microseconds
void writeMicroseconds(int value); // Write pulse width in microseconds
int read(); // returns current pulse width as an angle between 0 and 180 degrees
int readMicroseconds(); // returns current pulse width in microseconds for this servo (was read_us() in first release)
bool attached(); // return true if this servo is attached, otherwise false
private:
uint8_t servoIndex; // index into the channel data for this servo
int8_t min; // minimum is this value times 4 added to MIN_PULSE_WIDTH
int8_t max; // maximum is this value times 4 added to MAX_PULSE_WIDTH
};
Что мы можем узнать из этого кода? Достаточно много всего интересного!
- Минимальный импульс – 544 мкс
- Максимальный импульс – 2400 мкс
- Стандартный импульс после
attach()– 1500 мкс – значит серво повернётся на соответствующий угол после подключения! - Максимальное количество серво можно узнать, выведя дефайн
MAX_SERVOSв порт (Serial.print(MAX_SERVOS);) – для Arduino NANO это будет 12 штук - В классе Servo мы можем увидеть методы, которые не были раскрыты в примерах:
- Версия
attach()с возможностью указать мин. и макс. длину импульса вручную detach()– отключить серво от управленияwriteMicroseconds()– подать управляющий сигнал в мкс, а не в градусахread()– считать текущее положение серво (последнее отправленное черезwrite())- И некоторые другие
- Версия
Перед кодом также находится весьма подробное описание библиотеки и расписаны некоторые тонкости. Что я хочу этим сказать: очень часто именно заголовочный файл несёт основную массу полезной информации по возможностям библиотеки, и в “статьях” о модулях и датчиках вы эту информацию скорее всего не найдёте. Всегда изучайте заголовочный файл, если нужно серьёзно поработать с каким-то модулем или вообще библиотекой в целом!
Полезные страницы
- Набор GyverKIT – большой стартовый набор Arduino моей разработки, продаётся в России
- Каталог ссылок на дешёвые Ардуины, датчики, модули и прочие железки с AliExpress у проверенных продавцов
- Подборка библиотек для Arduino, самых интересных и полезных, официальных и не очень
- Полная документация по языку Ардуино, все встроенные функции и макросы, все доступные типы данных
- Сборник полезных алгоритмов для написания скетчей: структура кода, таймеры, фильтры, парсинг данных
- Видео уроки по программированию Arduino с канала “Заметки Ардуинщика” – одни из самых подробных в рунете
- Поддержать автора за работу над уроками
- Обратная связь – сообщить об ошибке в уроке или предложить дополнение по тексту ([email protected])