В данной статье речь пойдет о частотном преобразователе, в простонародье, частотнике. Данный частотник, а в дальнейшем частотный привод, способен управлять 3-х фазным асинхронным двигателем. В данном частотном приводе (ЧП) я использую интеллектуальный силовой модуль компании International Rectifier, а конкретно IRAMS10UP60B (на AliExpress), единственное, что с ним сделал, это перегнул ножки, так что, по сути, модуль получился IRAMS10UP60B-2. Выбор на данный модуль пал преимущественно из-за встроенного драйвера. Главной особенностью встроенного драйвера является возможность использования 3 ШИМ вместо 6 ШИМ каналов. Кроме того цена на данный модуль на eBay около 270 рублей. В качестве управляющего контроллера использую ATmega48.
Разрабатывая данный привод я делал упор на эффективность конструкции, минимальную себестоимость, наличие необходимых защит, гибкость конструкции. В результате получился частотный привод со следующими характеристиками (функциями):
- Выходная частота 5-200Гц
- Скорость набора частоты 5-50Гц в секунду
- Скорость снижения частоты 5-50Гц в секунду
- 4-х фиксированная скорость (каждая из которых от 5-200Гц)
- Вольт добавка 0-20%
- Две «заводских» настройки, которые всегда можно активировать
- Функция намагничивания двигателя
- Функция полной остановки двигателя
- Вход для реверса (как без него)
- Возможность менять характеристику U/F
- Возможность задания частоты с помощью переменного резистора
- Контроль температуры IGBT модуля (сигнализация в случае перегрева и остановки привода)
- Контроль напряжения DC звена (повышенное-пониженное напряжение DC звена, сигнализация и остановка привода)
- Пред заряд DC звена
- Максимальная мощность с данным модулем 750вт, но крутит и 1.1кв на моем ЧПУ
- Все это на одной плате размером 8 х 13 см .
На данный момент защита от сверх тока или кз не реализованы (считаю нет смысла, хотя, свободную ногу в МК с прерыванием по изменению оставил)
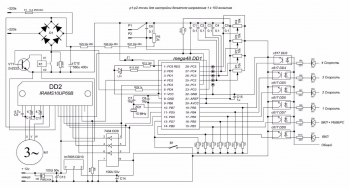
Собственно, схема данного девайса .
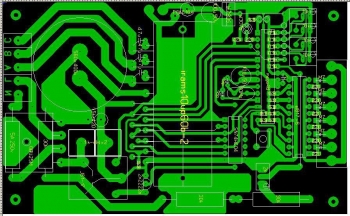
Проект в layout
Ниже фото того, что у меня получилось
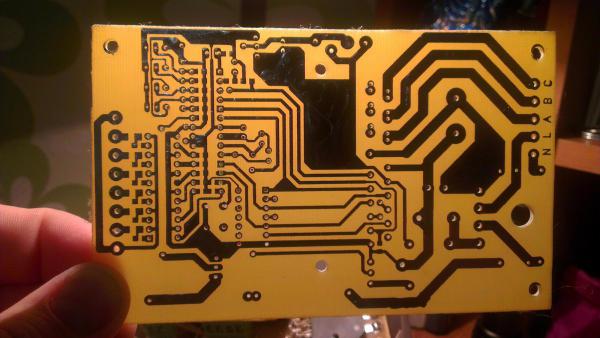
Печатная плата данного девайса (доступна в lay под утюг)

На данном фото полностью рабочий экземпляр, проверенный и обкатанный (не имеет панельки расположен слева). Второй для теста atmega 48 перед отправкой (расположен справа) .
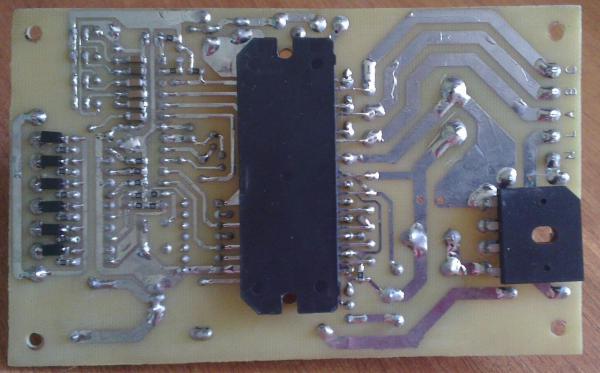
На данном фото тот самый irams (делал с запасом, должен поместится iramx16up60b )
Алгоритм работы устройства
Изначально МК (микроконтроллер) является настроенным на работу с электродвигателем номинальным напряжением 220В при частоте вращающего поля 50Гц (т.е. обычный асинхронник, на котором написано 220в 50Гц). Скорость набора частоты установлена на уровне 15Гц/сек.(т.е. разгон до 50 гц займет чуть более 3 сек., до 150 Гц-10 сек ). Вольт добавка установлена на уровне 10 %, длительность намагничивания 1 сек. (постоянная величина неизменна ), длительность торможения постоянным током 1 сек. (постоянная величина неизменна). Следует отметить ,что напряжение при намагничивании, как и при торможении, является напряжением вольт добавки и меняется одновременно. К слову, преобразователь частоты является скалярным, т.е. с ростом выходной частоты увеличивается выходное напряжение.
После подачи питания происходит заряд емкости dc звена. Как только напряжение достигает 220В (постоянное ) с определенной задержкой включается реле предзаряда и загорается единственный у меня светодиод L1. С этого момента привод готов к запуску. Для управления частотником имеется 6 входов:
- Вкл (если подать лишь этот вход, ЧП будет вращать двигатель с частотой 5Гц)
- Вкл+реверс(если подать лишь этот вход, ЧП будет вращать двигатель с частотой 5Гц, но в другую сторону)
- 1 фиксированная частота (задается R1)
- 2 фиксированная частота (задается R2)
- 3 фиксированная частота (задается R3)
- 4 фиксированная частота (задается R4)
В этом управлении есть одно Но. Если в процессе вращения двигателя менять задание на резисторе, то оно изменится лишь после повторной подачи команды (вкл.) или (вкл+реверс.). Иначе говоря, данные с резисторов читаются пока отсутствуют эти два сигнала. Если планируется регулировать скорость с помощью резистора в процессе работы, то необходимо установить джампер J1.В этом режиме активен лишь первый резистор, причем резистор R4 ограничивает максимальную частоту, то есть если его выставить на 50% (2.5 вольта 4 «штырь». на фото ниже 5 земля), то частота R1 будет регулироваться резистором от 5 до 100Гц.
Для задании частоты вращение нужно учитывать, что 5v на входе в МК соответствует 200Гц., 1v-40Гц, 1.25v-50Гц и т.д. Для измерения напряжение предусмотрены контакты 1-5, где 1-4 соответствуют номерам резисторов, 5- общий минус(на фото ниже). Резистор R5 служит для подстройки маштабирования напряжения DC звена 1в -100в (на схеме R30).
Расположение элементов
Внимание! Плата находится под напряжением опасным для жизни. Входа управления развязаны оптопарами.
Особенности настройки
Настройка привода перед первым включением сводится к проверке монтажа электронных компонентов и настройки делителя напряжения для DC звена (R2).
100 Вольтам DC звена должно соответствовать 1 вольт на 23 (ножке МК)- это ВАЖНО!!!!….На этом настройка завершена…
Перед подачей сетевого напряжения необходимо промыть плату (удалить остатки канифоли) со стороны пайки растворителем или спиртом, желательно покрыть лаком.
Привод имеет «заводские » настройки, которые подходят как для двигателя с напряжением 220В и частотой 50Гц), так и для двигателя с напряжением 380в и частотой 50гц. Данные настройки всегда можно установить если вы не решаетесь сами настраивать привод. Для того чтобы установить «заводские » настройки для двигателя (220в 50Гц) :
- Включить привод
- Дождаться готовности (если подано питание только на МК , просто подождать 2-3 секунды)
- Нажать и удерживать кнопку В1 до тех пор, пока светодиод L1 не начнет мигать, отпустить кнопку В1
- Подать команду выбора 1 скорости. Как только светодиод перестанет мигать, убрать команду
- Привод настроен . В зависимости от того …………………….светодиод горел (если не горел, то привод ожидает напряжения на DC звене).
При такой настройке автоматически в записываются следующие параметры:
- Номинальная частота двигателя при 220В — 50Гц
- Вольт добавка (напряжение намагничивания, торможения ) — 10%
- Интенсивность разгона 15Гц./сек
- Интенсивность торможения 15Гц./сек
Если подать сигнал выбора второй скорости, то в EEPROM запишутся следующие параметры (разница лишь в частоте):
- Номинальная частота двигателя при 220В- 30Гц
- Вольт добавка (Напряжение намагничивания, торможения ) 10%
- Интенсивность разгона 15Гц./сек
- Интенсивность торможения 15Гц./сек
Наконец, третий вариант Настройки:
- Нажать на кнопку В1 и держать
- Дождаться, когда светодиод начнет мигать
- Отпустить кнопку В1
- Не подавать напряжение на входа выбора 1-ой или 2-ой скорости
- Задать параметры подстроечными резисторами
- Нажать и удерживать кнопку В1 до тех пор, пока светодиод не начнет моргать
Таким образом, до тех пор, пока светодиод мигает, привод находится в режиме настройки. В этом режиме при подаче входа 1-ой или 2-ой скорости в EEPROM записываются параметры. Если не подавать напряжение на входа выбора 1-ой или 2-ой скорости, то фиксированные параметры в EEPROM не запишутся, а будут задаваться подстроечными резисторами.
- Резистор задает номинальную частоту двигателя при 220 В ( Так, например, если на двигателе написано 200Гц /220 то резистор нужно выкрутить на максимум; если написано 100Гц/ 220в нужно добиться 2.5 Вольта на 1-ом контакте. (1Вольт на первом контакте соответствует 40Гц); если на двигателе написано 50Гц/400В то нужно выставить 27Гц/0,68 В (например:(50/400)*220=27Гц )так, как нам необходимо знать частоту двигателя при 220В питания двигателя. Диапазон изменения параметра 25Гц — 200Гц.(1 Вольту на контакте 1-ом соответствует 40 Гц)
- Резистор отвечает за вольт добавку. 1 Вольт на 2-ом контакте соответствует 4% напряжения вольт добавки (мое мнение выбрать на уровне 10% то есть 2.5 вольта повышать с осторожностью) Диапазон настройки 0-20% от напряжения сети (1 Вольту на контакте 2-ом соответствует 4%)
- Интенсивность разгона 1 В соответствует 10Гц/сек (на мой взгляд оптимально 15 -25 Гц/сек) Диапазон настройки 5Гц/сек — 50Гц/сек. (1 вольту на контакте 3-ом соответствует 10 Гц/сек)
- Интенсивность торможения 1 В соответствует 10Гц/сек (на мой взгляд оптимально 10 -15 Гц/сек) Диапазон настройки 5Гц/сек — 50Гц/сек. (1 вольту на контакте 4-ом соответствует 10 Гц/сек)
После того, как все резисторы выставлены нажимаем и держим кнопку В1 до тех пор пока светодиод не перестанет мигать!!!! Если светодиод моргал и загорелся, то привод готов к запуску.Если светодиод моргал и НЕ загорелся, то ждем 5 секунд, и только потом отключаем питание от контроллера.
Ниже представлена вольт-частотная характеристика устройства для двигателя 220в 50Гц с вольт добавкой в 10 % .
- Uмах- максимальное напряжение, которое способен выдать преобразователь
- Uв.д.- напряжение вольт добавки в процентах от напряжении сети
- Fн.д.- номинальная частота вращения двигателя при 220В . ВАЖНО
- Fmax- максимальная выходная частота преобразователя.
Еще один пример настройки
Предположим, у вас имеется двигатель, на котором указана номинальная частота 50Гц , номинальное напряжение 80В, Чтобы узнать какая будет номинальная частота при 220В необходимо: 220 В разделить на номинальное напряжение и умножить на номинальную частоту (220/80*50=137Гц). Таким образом, мы получим,что напряжение на 1 контакте (резисторе) нужно выставить 137/40=3,45 В.
Симуляция в протеусе разгон 0-50Гц одной фазы (на 3-х фазах зависает комп )
Как видно из скриншота с ростом частоты увеличивается амплитуда синуса. Разгон занимает примерно 3.1 сек.
По поводу питания
Рекомендую использовать трансформатор, так как это самый надежный вариант. На моих тестовых платах нет диодных мостов и стабилизатора для igbt модуля 7812. Для скачивания доступны две печатные платы. Первая та которая представлена в обзоре. Вторая имеет незначительные изменения, добавлен диодный мостик и стабилизатор. Защитный диод ставить обязательно P6KE18A или 1.5KE18A ставить обязательно.
Пример размещения трансформатора, как оказалось найти совсем нетрудно.
Какой двигатель можно подключить к данному преобразователю частоты?
Все зависит от модуля. В принципе можно подключить любой, главное, чтобы его сопротивление для модуля irams10up60 было более 9 Ом. Нужно учесть, что модуль irams10up60 рассчитан на маленький импульсный ток и имеет встроенную защиту на уровне 15 А Этого очень мало. Но для двигателей 50Гц 220В 750 Вт, этого за глаза. Если у вас высокооборотистый шпиндель, то скорее всего он имеет маленькое сопротивление обмоток. Данный модуль может пробьет импульсным током. При использовании модуля IRAMX16UP60B (ножки придется загнуть самостоятельно) мощность двигателя по даташиту возрастает с 0.75 до 2.2 КВт.
Главное у данного модуля: ток короткого замыкания 140А против 47А, защита настроена на уровне 25А. Какой модуль использовать решать вам. Нужно помнить что на 1 кВт необходимо 1000мкФ емкости dc звена.
По поводу защиты от КЗ. Если у привода сразу после выхода не ставить сглаживающий дроссель (ограничивает скорость нарастания тока) и коротнуть выход модуля, то модулю придет «хана». Если у вас модуль iramX, шансы есть. А вот с IRAMS шансов ноль, проверено.
Программа занимает 4096 кБ памяти из 4098. Все сжато и оптимизировано под размер программы по максимум. Время цикла есть фиксированная величина равная 10мс.
На данный момент всё вышеописанное работает и испытано.
Если использовать кварц на 20МГц, то привод получится 10-400Гц; темп разгона 10-100Гц/сек; частота ШИМа возрастет до 10кГц; время цикла упадет до 5мс.
Забегая вперед следующий частотный преобразователь будет реализован на ATmegа64, иметь разрядность ШИМ не 8, а 10 Бит, иметь дисплей и множество параметров.
Ниже смотрите видео настройки привода, проверки защиты перегрева, демонстрации работы (использую двигатель 380В 50Гц, а настройки для 220В 50Гц). Так сделал специально, чтобы проверить как работает ШИМ с минимальным заданием.)
В свободном доступе прошивке не будет, НО запрограммированный контролер ATmega48-10pu или ATmega48-20pu будет дешевле mc3phac. Готов ответить на все ваши вопросы.
Заказ прошитого контроллера
Список радиоэлементов
| Обозначение | Тип | Номинал | Количество | Примечание | Магазин | Мой блокнот |
|---|---|---|---|---|---|---|
| DD1 | МК AVR 8-бит |
ATmega48 |
1 | Поиск в магазине Отрон | В блокнот | |
| DD2 | Микросхема | IRAMS10UP60B | 1 | Поиск в магазине Отрон | В блокнот | |
| DD3-DD8 | Оптопара |
PC817 |
6 | Поиск в магазине Отрон | В блокнот | |
| DD9 | ИС буфера, драйвера |
SN7404 |
1 | Поиск в магазине Отрон | В блокнот | |
| DD10 | Линейный регулятор |
LM7805 |
1 | Поиск в магазине Отрон | В блокнот | |
| VT1 | Биполярный транзистор |
2N2222 |
1 | Поиск в магазине Отрон | В блокнот | |
| D1 | Диодный мост | 1 | Поиск в магазине Отрон | В блокнот | ||
| D2-D7 | Диод | m7 | 6 | Поиск в магазине Отрон | В блокнот | |
| D8 | Защитный диод |
P6KE16A |
1 | Поиск в магазине Отрон | В блокнот | |
| LD1 | Светодиод | 1 | Поиск в магазине Отрон | В блокнот | ||
| С1-С6 | Конденсатор | 0.1 мкФ | 6 | Поиск в магазине Отрон | В блокнот | |
| С7, С8 | Конденсатор | 18 пФ | 2 | Поиск в магазине Отрон | В блокнот | |
| С9-С11 | Конденсатор | 4.7 мкФ | 3 | Поиск в магазине Отрон | В блокнот | |
| С12 | Электролитический конденсатор | 560 мкФ 400 В | 1 | Поиск в магазине Отрон | В блокнот | |
| С13, С14 | Электролитический конденсатор | 100 мкФ 50 В | 2 | Поиск в магазине Отрон | В блокнот | |
| С15 | Конденсатор | 1 мкФ | 1 | Поиск в магазине Отрон | В блокнот | |
| Р1-Р4 | Переменный резистор | 10 кОм | 4 | Поиск в магазине Отрон | В блокнот | |
| Р5 | Переменный резистор | 2 кОм | 1 | Поиск в магазине Отрон | В блокнот | |
| R5-R10 | Резистор |
220 Ом |
6 | Поиск в магазине Отрон | В блокнот | |
| R12, R16-R22, R28 | Резистор |
1.8 кОм |
9 | Поиск в магазине Отрон | В блокнот | |
| R13 | Резистор |
300 Ом |
1 | Поиск в магазине Отрон | В блокнот | |
| R23 | Резистор |
2 кОм |
1 | 8 Вт | Поиск в магазине Отрон | В блокнот |
| R24 | Резистор |
47 кОм |
1 | Поиск в магазине Отрон | В блокнот | |
| R25-R27 | Резистор |
30 кОм |
3 | 2 Вт | Поиск в магазине Отрон | В блокнот |
| R29 | Резистор |
1 кОм |
1 | Поиск в магазине Отрон | В блокнот | |
| ZQ1 | Кварцевый резонатор | 10 МГц | 1 | Поиск в магазине Отрон | В блокнот | |
| F1 | Предохранитель | 5 А 250 VAC | 1 | Поиск в магазине Отрон | В блокнот | |
| К1 | Реле | 1 | Поиск в магазине Отрон | В блокнот | ||
| J1 | Джампер | 1 | Поиск в магазине Отрон | В блокнот | ||
| В1 | Выключатель | 1 | Поиск в магазине Отрон | В блокнот | ||
| М1 | 3-х фазный двигатель | 1 | Поиск в магазине Отрон | В блокнот | ||
| Добавить все |
Скачать список элементов (PDF)
Теги:
Открытый проект частотного преобразователя для управления электродвигателями
Время прочтения
10 мин
Просмотры 27K

Цель проекта
Сделать компактный, встраиваемый и недорогой частотный преобразователь с питанием от однофазной сети 230-240 В 50Гц, способный управлять асинхронными 220 В 3-х фазными двигателями 1..2 кВт, для плавного разгона и остановки и поддержания частоты вращения от 0 до 1500 об. в мин. Связь с устройством через полевую шину CAN или RS485.
Решиться делать свой ЧП непросто, потому что есть масса готовых на любой вкус. Своя мелкосерийная разработка по цене будет неконкурентной. Однако если в ЧП перенести часть функциональности конечного агрегата помимо управления мотором, то можно удешевить аппаратную обвязку вокруг ЧП и экономически оправдать его создание.
Поиск интегрированных решений
В сети есть открытые проекты и отладочные платы частотных преобразователей с полной документацией и неплохо документированным софтом. Остаются неясными только вопросы оптимальности архитектуры, альтернативной компонентной базы, безопасности, электромагнитной эмиссии, надежности и прочая мелочь вроде диагностики, зазоров, клем, ремонтопригодности… Словом вопросов остается много.
Мы начали с покупки, казалось бы, солидного решения от фирмы Microchip. Коллеги по соседству тоже делали ЧП на Microchip, и я подумал что это то что нужно. Да, там еще был и корректор мощности.
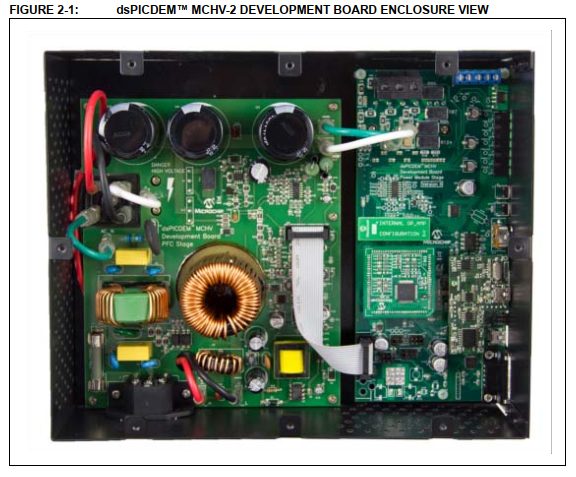
Эта плата сгорела после первого же подключения реального 1 кВт AC мотора. Изучив трассировку плат, стало понятно, что не сгореть это не могло. Вспыхнула пара дорожек под процессорным модулем. Что-то не рассчитали с их шириной. От решений Microchip сразу отказались и больше не возвращались. Все-таки нишевые микроконтроллерные архитектуры — это не наше. А тут еще такой фейл.
Были еще рассмотрены решения от ST, TI, NXP(Freescale), Infineon. Все хотят привязать разработчика к своим семействам микроконтроллеров. Используют для этого все средства — от лицензионных соглашений, до закрытых библиотек и программных инструментов. Этот мир вдруг показался неуютным.
Изучение других ЧП
Так как наборы разработчика от производителей чипов перестали вызывать доверие, то вторым шагом было посмотреть, как сделаны промышленные ЧП. Интересно узнать какие там микроконтроллеры, сколько их, какие силовые элементы, драйверы и прочее.
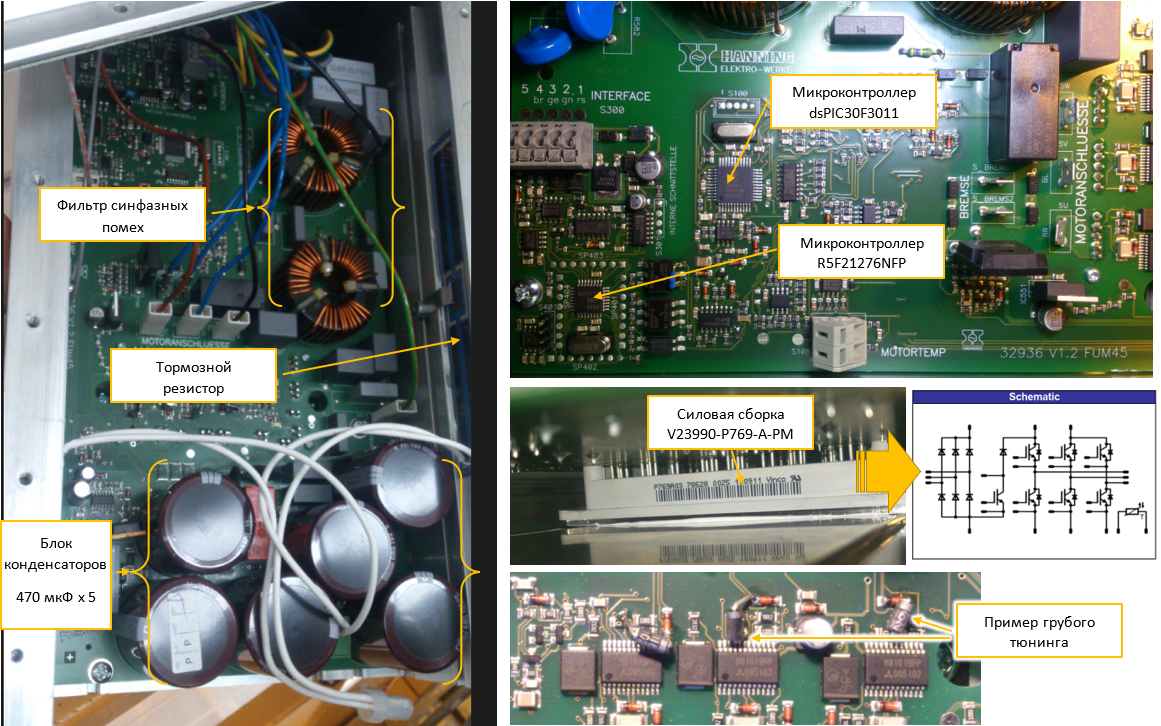
HANNING ELEKTRO-WERKE GmbH & Co. KG.
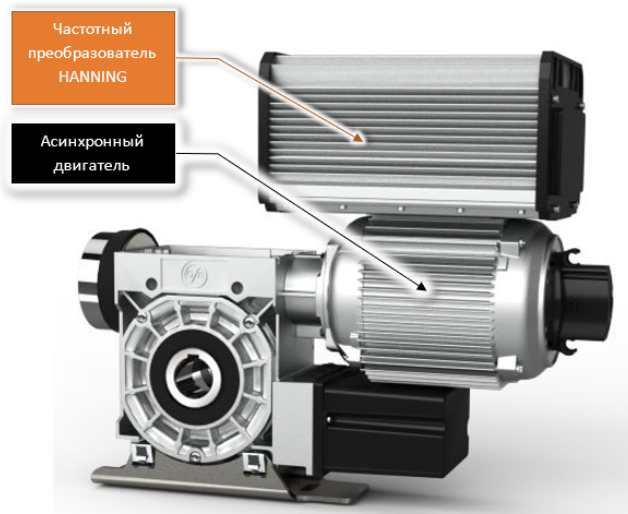
Это изделия, относящиеся к классу встраиваемых. Имеют пассивное охлаждение, т. е. в них отсутствуют вентиляторы. Лишены всяких элементов ручного управления и индикации, поскольку ставятся в труднодоступных местах. Предполагается подключение к неким внешним панелям управления через интерфейс RS485. Теоретически должны быть идеально согласованы с управляемыми ими моторами.
Правда опыт эксплуатации несколько испортил впечатление. Несмотря на наличие усиленных EMI фильтров и специализированных микроконтроллеров несколько таких преобразователей у нас сгорело просто потому, что заклинивало редукторы у моторов. Ниже показаны снимки внутренности одного из ЧП данной серии.
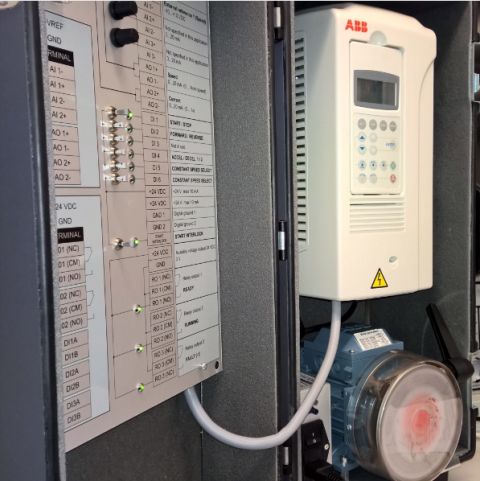
OMRON 3G3MX2-A4040-E.

Это ЧП общего применения c 3-фазным входом. Очень многофункциональный. Настолько, что одних только регулируемых параметров в нем около 700. Мануал 350 страниц. Состоят из четырёх многослойных плат с двухсторонним монтажом. Решение довольно дорогое для мелкосерийной разработки, но все равно интересное с точки зрения применяемых вычислительных ресурсов.

Преобразователь OMRON не имеет корректора мощности, но в случае необходимости дополнительного подавления пульсация тока в разрыв DC шины можно подключить внешний мощный дроссель. Также нет стартового реле с ограничителем тока при подаче напряжения, эту роль скорее всего выполняет твердотельный ключ с резистором 13 Ом. Обмен с сервисной программой несмотря на USB очень медленный. ЭМИ-фильтра на борту нет. Отличаются повышенной перегрузочной способностью, видимо обусловленной оригинальным исполнением IGBT модуля.
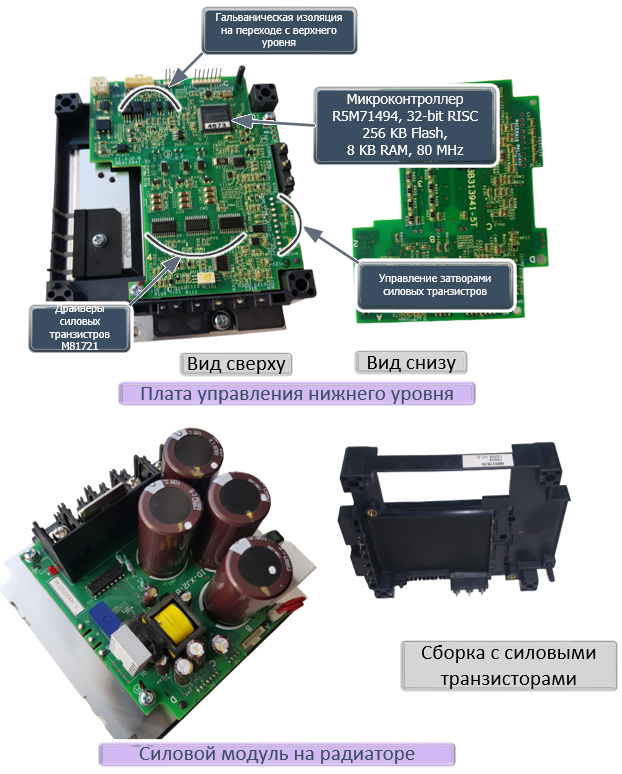
Invertek OPTIDRIVE P2

Частотный преобразователь OPTIDRIVE P2 очень технологично скомпонован и послужил образцом для нашего проекта. Выполнен также на двух микроконтроллерах, но до второго добраться не удалось. В качестве силового элемента использована сборка SPM 45 Series от фирмы FAIRCHILD.
Еще изучались преобразователи Lenze SMVector (выполнен на MC9S12E128, 16 bit, 128 KB Flash, 8 KB RAM, 50 MHz и MC68H0908, 8 bit, 32 KB Flash, 512 B RAM, 8 MHz)
Shenzhen INVT Electric Goodrive20-EU
И наконец на самом пике дефицита пришлось изучить преобразователь, разработанный в Китае — Goodrive20-EU. Надо признать, что Goodrive20 явился примером экономии на всем: меньший чем у остальных размер радиатора, меньшая емкость конденсаторов, всего один микроконтроллер, отсутствие ЭМИ-фильтра, лаконичная документация, сравнительно бедный набор регулируемых параметров.

И тем не менее он работал не хуже чем Omron MX2 в некоторых применениях, хотя и с нюансами в способе управления. В частности, долго инициализируется после подачи питания.
Обобщенная структурная схема ЧП
В результате сформировалось представление об обобщенной архитектуре ЧП.
Во-первых, во всех исследованных ЧП применяются интегрированные IGBT модули. На дискретных транзисторах изделий не попадалось. Всегда есть узел ограничителя тока включения. Даже до мощностей в 3 кВт с питанием от однофазной сети не встречаются корректоры мощности (ККМ). Наличие EMI фильтра тоже не является обязательным. Не бывает в ЧП и предохранителей. ЧП всегда включают через защитные автоматы.
Интерфейсная часть ЧП гальванически развязана от силовой части. Силовая часть находится под управлением микроконтроллера с архитектурой DSP или RISC. Микроконтроллеры при этом не самые быстрые по современным меркам, не более 80 МГц. Интерфейсная часть может содержать, а может и не содержать отдельного микроконтроллера. Измерители токов фаз на двигателе делаются на основе шунтов, присоединённых к минусу DC шины. Важным компонентом промышленных ЧП является сдублированный узел экстренного гарантированного отключения мотора (safe torque off, STO). Это узел позволяет отказаться от пары внешних контакторов для отключения питания ЧП в экстренных случаях.

В результате анализа было решено для своего ЧП использовать один микроконтроллер, но более производительный. Им стал MK60FN1M0VLQ12 (ARM® Cortex®-M4, 120 МГц, 1 MB Flash, 128 KB RAM). В пользу такого выбора было несколько аргументов. На тот момент фирма Freescale выложила хороший программный инструментарий для разработки ПО управления двигателями и его отладки. И был расчёт на применение вычислений с плавающей точкой вместо вычислений с фиксированной. Это облегчило бы отладку, моделирование и тестирование. Про остальные аргументы было в этой статье.
Конструкция ЧП
Поскольку ЧП встраиваемый, то он не нуждается в специальном корпусе. Поэтому был изготовлен простой кожух из листовой стали с креплением двух вентиляторов. Была цель максимально упростить сборку и разборку ЧП. Пилотная версия нашего ЧП в свое время размещалась на одной плате. В этой версии стало три платы. Таким образом ЧП получился более компактным. А его модульность позволяет удешевить модификации функциональности и проще выполнять изменения в компонентной базе.
ЧП состоит из трех основных плат:
-
Управляющая плата с микроконтроллером и внешними интерфейсами.
-
Плата DC шины, на которой расположен блок питания и блок конденсаторов
-
Силовая плата, на которой расположен IGBT модуль, силовые входы и выходы, измерители тока, EMI фильтр.

Компоненты ЧП
Управляющая плата
На управляющей плате находится микроконтроллер и гальвано изолированные внешние интерфейсы:
-
интерфейс для подключения внешнего квадратурного энкодера
-
интерфейс RS232
-
интерфейс CAN
-
интерфейс USB
-
три дискретных выхода и один дискретный вход
Управляющая плата соединяется с силовой платой двумя плоскими шлейфами через разъемы X7 и X8. Через X7 проходят сигналы управления затворами IGBT модуля. Через X8 проходят сигналы измерения тока и напряжения, линии I2C и несколько других сигналов. Похожая схема применяется в Goodrive20-EU.



Кроме того, на управляющей плате находится литиевый аккумулятор для поддержания энергонезависимой работы часов реального времени, держатель для uSD карты и зуммер. Это не обязательные компоненты, но полезные на этапе разработки, отладки и диагностики ПО.
Плата DC шины
DC шина находится под напряжением 310…340 В и через нее проходит средний ток до 10А на максимальной мощности. На плате размещен блок питания в виде отдельного модуля. Так решено было сделать питание просто ради упрощения дизайна платы. На плате находится транзисторный ключ Q3 управляющий вентиляторами. Вентиляторы включаются только при достижении IGBT модулем определенной заданной температуры.


Силовая плата
Главным элементом всего устройства является IGBT модуль.

В нашем случае использован модуль FSBB30CH60C. Модуль порадовал своей исключительной надежностью. В течении разработки не сгорел ни один модуль. Некоторое время назад это был самый доступный и недорогой модуль. Модуль управляется напрямую логическими сигналами и имеет встроенные защиты от недонапряжения и короткого замыкания.

Немного усложняет дело отсутствие температурного сенсора, встроенного в модуль. Термосенсор пришлось сделать отдельно на микросхеме MAX31725MTA+ на своей маленькой плате и разместить под корпусом IGBT модуля. Проект термосенсора находится в директории TempSensor. Термосенсор соединен с микроконтроллером интерфейсом I2C.
Измерение токов на трех выходах IGBT модуля сделано иначе чем в обычных ЧП. Вместо шунтов поставлены гальвано изолированные датчики Холла ACS759LCB-050B-PFF-T. Это более дорогое решение, но позволяющее более креативно подойти к выбору способов модуляции и упростить трассировку. Традиционные шунты в нижних плечах силовых транзисторов ограничивают возможные типы модуляций. Это не проблема в промышленных ЧП, но наш сделан еще и в экспериментальных целях и мог бы быть применен не только с асинхронными двигателями, но и с синхронными, и с более экзотическими.


.
Программное обеспечение
Фирмаваре ЧП состоит из двух частей: начального загрузчика и основного приложения.
Начальный загрузчик находится в директории Firmware/Inverter_bootloader и позволяет загружать основное приложение через CAN и через интерфейс RS232. Бинарный образ приложения создается утилитой BIB. Утилита находится в директории Firmware/Loader.
Помимо прочего образ может быть утилитой зашифрован. Загрузчик умеет расшифровывать образы.
Сам проект рабочего приложения находится в директории Firmware/Inverter_firmware. Компилируются проекты в среде EWARM, версии не выше 670.3
Представленное программное обеспечение расчитано на очень простое подключение ЧП.

ЧП управляется по шине CAN в режиме скалярного управления.
Почему скалярного? Скалярное управление несмотря на все недостатки при этом характеризуется более низким уровнем шума издаваемым мотором, по крайней мере, когда имеем дело с ЧП, описанными выше и безсенсорным управлением. При стабильной нагрузке и номинальной скорости двигателя в основном рабочем цикле скалярное управление хорошо себя показывает.
Принято считать («Practical Variable Speed Drives and Power Electronics», Malcolm Barnes 2003 ) что безсенсорное скалярное управление обеспечивает точность скорости в 1% и время отклика момента 100 мс, а векторное безсенсорное соответственно 0.5% и 10 мс.
Результаты качества потребления энергии частотным преобразователем на разных мощностях при частоте модуляции 16 КГц:

Используемы в таблице обозначения:
-
V(V) – текущее действующее входное напряжение однофазной сети в вольтах
-
THD V(%) – total harmonic distortion, Коэффициент нелинейных искажений по напряжению
-
I(A) – действующее значение тока в амперах
-
THD I(%) – total harmonic distortion, Коэффициент нелинейных искажений по току
-
I peak (A) – пиковое значение тока в амперах
-
CF I (A) – Коэффициент амплитуды сигнала (крест-фактор) в амперах
-
|P| (W) – Активная потребляемая мощность в ваттах
-
Q (Var) – Реактивная потребляемая мощность. Единица измерения – вар
-
S (VA) – Полная потребляемая мощность. Единица измерения ВА
-
PF — Коэффициент мощности
-
COS PHI – косинус фи
Несколько слов о безопасности
Сначала о сохранности самого преобразователя. Всегда надо помнить о такой вещи как реформинг. Может случиться так что высоковольтные электролитические конденсаторы, установленные в ЧП где-то долго хранились, или сам ЧП не был подключен в сеть более года. В таком случае у конденсаторов истончается диэлектрический слой, и они могут не выдержать быстрой подачи на них полного номинального напряжения и рабочего тока. Тогда требуется реформинг или, иными словами, осторожное постепенное включение.
Защита от возгорания. Она организуется несколькими способами. Сами печатные платы должны быть изготовлены по соответствующей технологии и иметь UL маркировку. Далее необходимо обеспечить ширину силовых проводников на плате, исключающую их возгорание раньше, чем произойдёт выключение внешних силовых расцепителей.
")
Электробезопасность. Корпус ЧП обязательно должен заземляться. Варисторы на входе ЧП обеспечивают защиту от кратковременных перенапряжений, но при длительных перенапряжениях они сгорают, оставляя толстый слой проводящей сажи.
Тут в действие вступает заземление. Однако ставить чувствительные реле утечки на частотные преобразователи не рекомендуется, поскольку емкость мотора относительно земли настолько существенна, что может вызвать утечку большую чем уровень срабатывания реле. Поэтому заземление должно быть максимально надежным. Стоит также помнить, что заземление само по себе не обеспечивает защиту от электромагнитных помех, излучаемых самой цепью заземления. Поэтому все информационные кабели если они лежат рядом с цепью заземления или заземляющими конструкциями должны иметь свои экраны подключённые к собственным локальным землям. И такие экраны не должны образовывать замкнутых контуров.

Эксплуатационная безопасность. На роботизированных объекта, станках, агрегатах, подъемниках, кранах, эскалаторах — везде есть средства экстренной остановки в виде концевиков, датчиков, микровыключателей и проч. Чтобы люди сами могли активизировать экстренную остановку устанавливаются большие заметные красные кнопки. Все эти средства объединяются в электрическую цепь безопасности. Конечной точкой этой цепи являются контакторы, реле или иные ресцепители, обрывающие подачу тока на электродвигатели. На частотных преобразователях в роли расцепителя выступает узел STO (safe torque off) упомянутый выше. Обычно есть два дублирующихся входа STO, но в нашем ЧП есть только один. Это означает что для реализации дублирования средства безопасности дополнительно необходим внешний контактор, разрывающий цепь питания к ЧП при разрыве цепи безопасности. Так требуют стандарты.

В результате у нас получился вот такой ЧП
Для тех же кто заинтересовался проектом в директории JTAG_isolator лежит проект платы изолятора JTAG интерфейса. Очень трудно отлаживать электронику подключенную в сеть без хороших изоляторов.
К сожалению, формат короткой статьи для хабра не позволяет описать все перипетии разработки, алгоритмы, архитектуру софта и прочие подробности. Поэтому заранее прошу понимания читателей если тема не раскрыта в желаемом объёме.
Ещё есть время.
Все материалы по проекту частотного преобразователя лежат и накапливаются тут — https://github.com/Indemsys/Frequency_Inverter
Частотный преобразователь. Схемы, печатки, описание и программы.
Для самостоятельной сборки потребуются некоторые знания и навыки. Впрочем, неподготовленные люди такие материалы не ищут. Поэтому мы представим два варианта частотных преобразователей от известных и авторитетных источников интернета, т.к. их публикациям можно доверять, за что их и благодарим.
P.S. Применяются жаргонные радиолюбительские выражения, но при этом, человекопонятные.

И так:
Вариант 1
Всем здравствуйте. Вот решил написать статейку про асинхронный привод и преобразователь частоты, который я изготавливал. Моему товарищу надо было крутить пилораму, и крутить хорошо. А сам я занимался импульсной электроникой и сразу предложил ему частотник. Да, можно было купить фирмовый преобразователь, и мне приходилось с ними сталкиваться, параметрировать, но захотелось своего, САМОДЕЛАШНОГО! Да и привод циркулярки к качеству регулирования скорости не критичен, только вот к ударным нагрузкам и к работе в перегрузе должен быть готов. Также максимально-простое управление с помощью пары кнопок и никаких там параметров.
Основные достоинства частотнорегулируемого привода (может для кого-то повторюсь):
Формируем из одной фазы 220 В полноценные 3 фазы 220 В со сдвигом 120 град., и имеем полный вращающий момент и мощность на валу.
Увеличенный пусковой момент и плавный пуск без большого пускового тока
Отсутствует замагничивание и лишний нагрев двигателя, как при использовании конденсаторов.
Возможность легко регулировать скорость и направление, если необходимо.
Вот какая схемка собралась:

3-фазный мост на IGBT транзисторах c обратными диодами (использовал имеющиеся G4PH50UD) управляется через оптодрайвера HCPL 3120 (бутстрепная схема запитки) микроконтроллером PIC16F628A. На входе гасящий конденсатор для плавного заряда электролитов DC звена. Затем его шунтирует реле и на микроконтроллер одновременно приходит логический уровень готовности. Также имеется триггер токовой защиты от к.з. и сильной перегрузки двигателя. Управление осуществляют 2 кнопки и тумблер изменения направления вращения.
Силовая часть мною была собрана навесным монтажом. Плата контроллера отутюжина вот в таком виде:

Параллельные резисторы по 270 к на проходных затворных конденсаторах (забыл под них места нарисовать) припаял сзади платы, потом хотел заменить на смд но так и оставил.
Есть внешний вид этой платы, когда уже спаивал:

Вид с другой стороны

Для питания управления был собран типовой импульсный обратноходовой (FLAYBACK) блок питания.
Его схема:

Можно использовать любой блок питания на 24В, но стабилизированный и с запаздыванием пропадания выходного напряжения от момента пропажи сетевого на пару тройку секунд. Это необходимо чтобы привод успел отключиться по ошибке DC. Добивался установкой электролита С1 большей ёмкости.
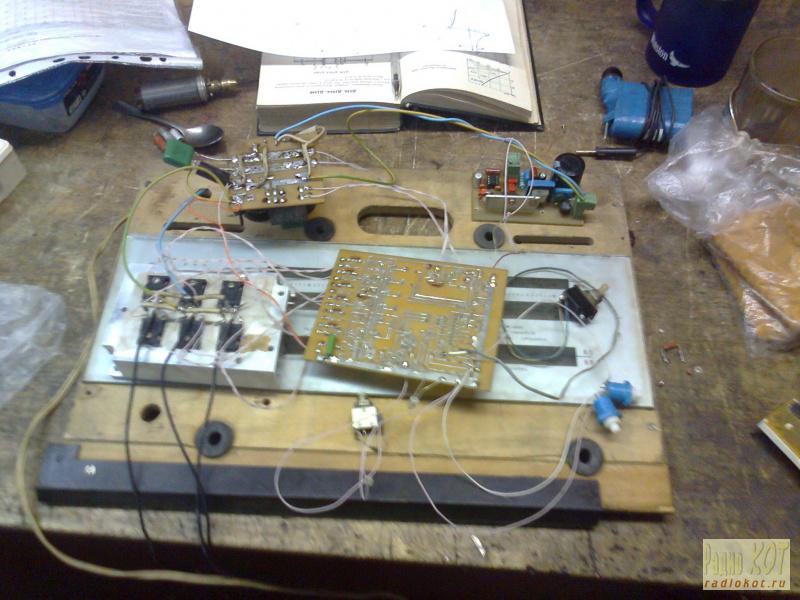
Теперь о самом главном…о программе микроконтроллера. Программирование простых моргалок для меня сложности не представляло, но тут надо было поднатужить мозги. Порыскав в интернете, я не нашёл на то время подходящей информации. Мне предлагали поставить и специализированные контроллеры, например контроллер фирмы MOTOROLA MC3PHAC. Но хотелось, повторюсь, своего. Принялся детально разбираться с ШИМ модуляцией, как и когда нужно открыть какой транзистор… Открылись некие закономерности и вышел шаблон самой простой программы отработки задержек, с помощью которой можно выдать удовлетворительно синусовую ШИМ и регулировать напряжение. Считать ничего контроллер конечно не успевал, прерывания не давали что надо и поэтому я идею крутого обсчёта ШИМ на PIC16F628A сразу отбросил. В итоге получилась матрица констант, которую отрабатывал контроллер. Они задавали и частоту и напряжение. Возился честно скажу, долго. Пилорама уже во всю пилила конденсаторами, когда вышла первая версия прошивки. Проверял всю схему сначала на 180 ватном движке вентиляторе. Вот как выглядела «экспериментальная установка»:

Первые эксперименты показали, что у этого проекта точно есть будущее.
Программа дорабатывалась и в итоге после раскрутки 4 кВт-ного движка её можно было собирать и идти на лесопилку.
Товарищ был приятно удивлён, хоть и с самого начала относился скептически. Я тоже был удивлён, т.к. проверилась защита от к.з. (случайно произошло в борно двигателя). Всё осталось живо. Двигатель на 1,5 кВт 1440 об/мин легко грыз брусы диском на 300 мм. Шкивы один к одному. При ударах и сучках свет слегка пригасал, но двигатель не останавливался. Ещё пришлось сильно подтягивать ремень, т.к. скользил при сильной нагрузке. Потом поставили двойную передачу.
Сейчас ещё дорабатываю программу она станет еще лучше, алгоритм работы шим чуть сложнее, режимов больше, возможность раскручиваться выше номинала…а тут снизу та самая простая версия которая работает на пиле уже около года.
Её характеристики:
- Выходная Частота: 2,5-50 Гц, шаг 1,25 Гц; Частота ШИМ синхронная, изменяющаяся. Диапазон примерно 1700-3300 Гц.; Скалярный режим управления U/F, мощность двигателя до 4 кВт.
- Минимальная рабочая частота после однократного нажатия на кнопку ПУСК(RUN) — 10Гц.
- При удержании кнопки RUN происходит разгон, при отпускании частота остаётся та, до которой успел разогнаться. Максимальная 50 Гц- сигнализируется светодиодом. Время разгона около 2 с.
- Светодиод «готовность» сигнализирует о готовности к запуску привода.
- Реверс опрашивается в состоянии готовности.
- Режимов торможения и регулирования частоты вниз нет, но они в данном случае и не нужны.
- При нажатии Стоп или СБРОС происходит остановка выбегом.
Программа и печатка в конце материала.
Вариант 2
Частотный привод 5-200 Гц (10-400 Гц)
В данной статье речь пойдет о частотном преобразователе, в простонародье, частотнике. Данный частотник, а в дальнейшем частотный привод, способен управлять 3-х фазным асинхронным двигателем. В данном частотном приводе (ЧП) я использую интеллектуальный силовой модуль компании International Rectifier, а конкретно IRAMS10UP60B (на AliExpress), единственное, что с ним сделал, это перегнул ножки, так что, по сути, модуль получился IRAMS10UP60B-2. Выбор на данный модуль пал преимущественно из-за встроенного драйвера. Главной особенностью встроенного драйвера является возможность использования 3 ШИМ вместо 6 ШИМ каналов. Кроме того цена на данный модуль на eBay около 270 рублей. В качестве управляющего контроллера использую ATmega48.
Разрабатывая данный привод я делал упор на эффективность конструкции, минимальную себестоимость, наличие необходимых защит, гибкость конструкции. В результате получился частотный привод со следующими характеристиками (функциями):
- Выходная частота 5-200 Гц
- Скорость набора частоты 5-50 Гц в секунду
- Скорость снижения частоты 5-50 Гц в секунду
- 4-х фиксированная скорость (каждая из которых от 5-200 Гц)
- Вольт добавка 0-20%
- Две «заводских» настройки, которые всегда можно активировать
- Функция намагничивания двигателя
- Функция полной остановки двигателя
- Вход для реверса (как без него)
- Возможность менять характеристику U/F
- Возможность задания частоты с помощью переменного резистора
- Контроль температуры IGBT модуля (сигнализация в случае перегрева и остановки привода)
- Контроль напряжения DC звена (повышенное-пониженное напряжение DC звена, сигнализация и остановка привода)
- Пред заряд DC звена
- Максимальная мощность с данным модулем 750 вт, но крутит и 1.1 кв на моем ЧПУ
- Все это на одной плате размером 8 х 13 см .
На данный момент защита от сверх тока или кз не реализованы (считаю нет смысла, хотя, свободную ногу в МК с прерыванием по изменению оставил)
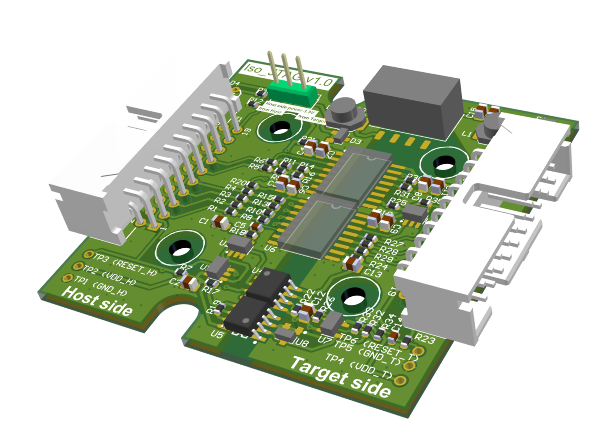
Собственно, схема данного девайса :


Проект в layout
Ниже фото того, что у меня получилось

Печатная плата данного девайса (доступна в lay под утюг)

На данном фото полностью рабочий экземпляр, проверенный и обкатанный (не имеет панельки расположен слева). Второй для теста atmega 48 перед отправкой (расположен справа).

На данном фото тот самый irams (делал с запасом, должен поместится iramx16up60b )
Алгоритм работы устройства
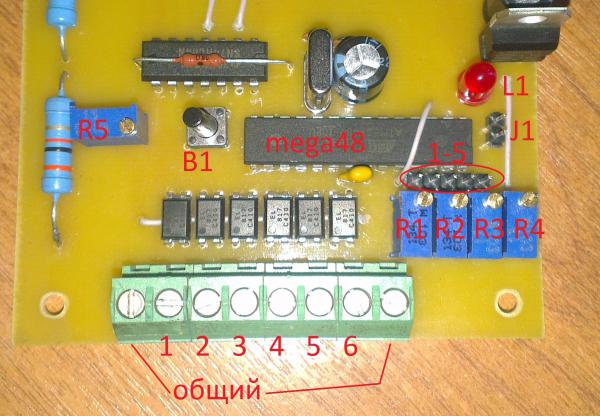
Изначально МК (микроконтроллер) является настроенным на работу с электродвигателем номинальным напряжением 220 В при частоте вращающего поля 50Гц (т.е. обычный асинхронник, на котором написано 220 в 50 Гц). Скорость набора частоты установлена на уровне 15 Гц/сек.(т.е. разгон до 50 гц займет чуть более 3 сек., до 150 Гц-10 сек ). Вольт добавка установлена на уровне 10 %, длительность намагничивания 1 сек. (постоянная величина неизменна ), длительность торможения постоянным током 1 сек. (постоянная величина неизменна). Следует отметить ,что напряжение при намагничивании, как и при торможении, является напряжением вольт добавки и меняется одновременно. К слову, преобразователь частоты является скалярным, т.е. с ростом выходной частоты увеличивается выходное напряжение.
После подачи питания происходит заряд емкости dc звена. Как только напряжение достигает 220В (постоянное ) с определенной задержкой включается реле предзаряда и загорается единственный у меня светодиод L1. С этого момента привод готов к запуску. Для управления частотником имеется 6 входов:
- Вкл (если подать лишь этот вход, ЧП будет вращать двигатель с частотой 5 Гц)
- Вкл+реверс(если подать лишь этот вход, ЧП будет вращать двигатель с частотой 5 Гц, но в другую сторону)
- 1 фиксированная частота (задается R1)
- 2 фиксированная частота (задается R2)
- 3 фиксированная частота (задается R3)
- 4 фиксированная частота (задается R4)
В этом управлении есть одно Но. Если в процессе вращения двигателя менять задание на резисторе, то оно изменится лишь после повторной подачи команды (вкл.) или (вкл+реверс.). Иначе говоря, данные с резисторов читаются пока отсутствуют эти два сигнала. Если планируется регулировать скорость с помощью резистора в процессе работы, то необходимо установить джампер J1.В этом режиме активен лишь первый резистор, причем резистор R4 ограничивает максимальную частоту, то есть если его выставить на 50% (2.5 вольта 4 «штырь». на фото ниже 5 земля), то частота R1 будет регулироваться резистором от 5 до 100 Гц.
Для задании частоты вращение нужно учитывать, что 5v на входе в МК соответствует 200 Гц., 1v-40 Гц, 1.25v-50 Гц и т.д. Для измерения напряжение предусмотрены контакты 1-5, где 1-4 соответствуют номерам резисторов, 5- общий минус(на фото ниже). Резистор R5 служит для подстройки масштабирования напряжения DC звена 1 в -100 в (на схеме R30).

Расположение элементов
Внимание! Плата находится под напряжением опасным для жизни. Входа управления развязаны оптопарами.
Особенности настройки
Настройка привода перед первым включением сводится к проверке монтажа электронных компонентов и настройки делителя напряжения для DC звена (R2).
100 Вольтам DC звена должно соответствовать 1 вольт на 23 (ножке МК)- это ВАЖНО!!!!….На этом настройка завершена…
Перед подачей сетевого напряжения необходимо промыть плату (удалить остатки канифоли) со стороны пайки растворителем или спиртом, желательно покрыть лаком.
Привод имеет «заводские » настройки, которые подходят как для двигателя с напряжением 220 В и частотой 50 Гц), так и для двигателя с напряжением 380 в и частотой 50 гц. Данные настройки всегда можно установить если вы не решаетесь сами настраивать привод. Для того чтобы установить «заводские » настройки для двигателя (220 в 50 Гц) :
- Включить привод
- Дождаться готовности (если подано питание только на МК , просто подождать 2-3 секунды)
- Нажать и удерживать кнопку В1 до тех пор, пока светодиод L1 не начнет мигать, отпустить кнопку В1
- Подать команду выбора 1 скорости. Как только светодиод перестанет мигать, убрать команду
- Привод настроен . В зависимости от того …………………….светодиод горел (если не горел, то привод ожидает напряжения на DC звене).
При такой настройке автоматически в записываются следующие параметры:
- Номинальная частота двигателя при 220 В — 50 Гц
- Вольт добавка (напряжение намагничивания, торможения ) — 10%
- Интенсивность разгона 15 Гц./сек
- Интенсивность торможения 15 Гц./сек
Если подать сигнал выбора второй скорости, то в EEPROM запишутся следующие параметры (разница лишь в частоте):
- Номинальная частота двигателя при 220 В- 30 Гц
- Вольт добавка (Напряжение намагничивания, торможения ) 10%
- Интенсивность разгона 15 Гц./сек
- Интенсивность торможения 15 Гц./сек
Наконец, третий вариант Настройки:
- Нажать на кнопку В1 и держать
- Дождаться, когда светодиод начнет мигать
- Отпустить кнопку В1
- Не подавать напряжение на входа выбора 1-ой или 2-ой скорости
- Задать параметры подстроечными резисторами
- Нажать и удерживать кнопку В1 до тех пор, пока светодиод не начнет моргать
Таким образом, до тех пор, пока светодиод мигает, привод находится в режиме настройки. В этом режиме при подаче входа 1-ой или 2-ой скорости в EEPROM записываются параметры. Если не подавать напряжение на входа выбора 1-ой или 2-ой скорости, то фиксированные параметры в EEPROM не запишутся, а будут задаваться подстроечными резисторами.
- Резистор задает номинальную частоту двигателя при 220 В ( Так, например, если на двигателе написано 200 Гц /220 то резистор нужно выкрутить на максимум; если написано 100 Гц/ 220 в нужно добиться 2.5 Вольта на 1-ом контакте. (1 Вольт на первом контакте соответствует 40 Гц); если на двигателе написано 50 Гц/400 В то нужно выставить 27 Гц/0,68 В (например:(50/400)*220=27 Гц )так, как нам необходимо знать частоту двигателя при 220В питания двигателя. Диапазон изменения параметра 25 Гц — 200 Гц.(1 Вольту на контакте 1-ом соответствует 40 Гц)
- Резистор отвечает за вольт добавку. 1 Вольт на 2-ом контакте соответствует 4% напряжения вольт добавки (мое мнение выбрать на уровне 10% то есть 2.5 вольта повышать с осторожностью) Диапазон настройки 0-20% от напряжения сети (1 Вольту на контакте 2-ом соответствует 4%)
- Интенсивность разгона 1 В соответствует 10 Гц/сек (на мой взгляд оптимально 15 -25 Гц/сек) Диапазон настройки 5 Гц/сек — 50 Гц/сек. (1 вольту на контакте 3-ом соответствует 10 Гц/сек)
- Интенсивность торможения 1 В соответствует 10 Гц/сек (на мой взгляд оптимально 10 -15 Гц/сек) Диапазон настройки 5 Гц/сек — 50 Гц/сек. (1 вольту на контакте 4-ом соответствует 10 Гц/сек)
После того, как все резисторы выставлены нажимаем и держим кнопку В1 до тех пор пока светодиод не перестанет мигать!!!! Если светодиод моргал и загорелся, то привод готов к запуску.Если светодиод моргал и НЕ загорелся, то ждем 5 секунд, и только потом отключаем питание от контроллера.
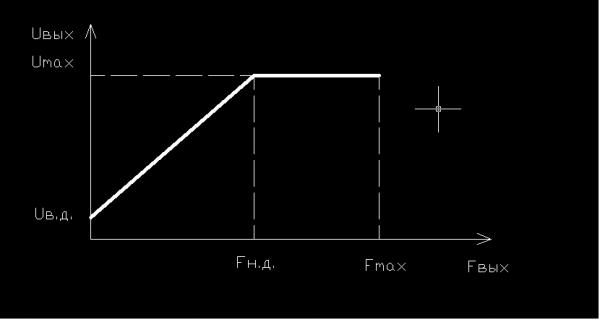
Ниже представлена вольт-частотная характеристика устройства для двигателя 220 в 50 Гц с вольт добавкой в 10 % .

- Uмах- максимальное напряжение, которое способен выдать преобразователь
- Uв.д.- напряжение вольт добавки в процентах от напряжении сети
- Fн.д.- номинальная частота вращения двигателя при 220 В . ВАЖНО
- Fmax- максимальная выходная частота преобразователя.
Еще один пример настройки
Предположим, у вас имеется двигатель, на котором указана номинальная частота 50 Гц , номинальное напряжение 80 В, Чтобы узнать какая будет номинальная частота при 220 В необходимо: 220 В разделить на номинальное напряжение и умножить на номинальную частоту (220/80*50=137 Гц). Таким образом, мы получим,что напряжение на 1 контакте (резисторе) нужно выставить 137/40=3,45 В.
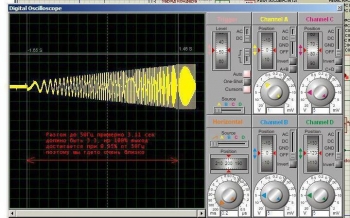
Симуляция в протеусе разгон 0-50 Гц одной фазы (на 3-х фазах зависает комп )

Как видно из скриншота с ростом частоты увеличивается амплитуда синуса. Разгон занимает примерно 3.1 сек.
По поводу питания
Рекомендую использовать трансформатор, так как это самый надежный вариант. На моих тестовых платах нет диодных мостов и стабилизатора для igbt модуля 7812. Для скачивания доступны две печатные платы. Первая та которая представлена в обзоре. Вторая имеет незначительные изменения, добавлен диодный мостик и стабилизатор. Защитный диод ставить обязательно P6KE18A или 1.5KE18A ставить обязательно.

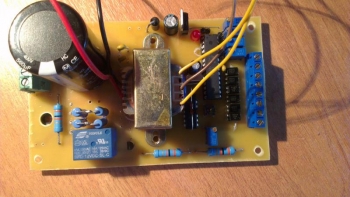
Пример размещения трансформатора, как оказалось найти совсем нетрудно.
Какой двигатель можно подключить к данному преобразователю частоты?
Все зависит от модуля. В принципе можно подключить любой, главное, чтобы его сопротивление для модуля irams10up60 было более 9 Ом. Нужно учесть, что модуль irams10up60 рассчитан на маленький импульсный ток и имеет встроенную защиту на уровне 15 А Этого очень мало. Но для двигателей 50 Гц 220 В 750 Вт, этого за глаза. Если у вас высокооборотистый шпиндель, то скорее всего он имеет маленькое сопротивление обмоток. Данный модуль может пробьет импульсным током. При использовании модуля IRAMX16UP60B (ножки придется загнуть самостоятельно) мощность двигателя по даташиту возрастает с 0.75 до 2.2 кВт.
Главное у данного модуля: ток короткого замыкания 140 А против 47 А, защита настроена на уровне 25 А. Какой модуль использовать решать вам. Нужно помнить что на 1 кВт необходимо 1000 мкФ емкости dc звена.
По поводу защиты от КЗ. Если у привода сразу после выхода не ставить сглаживающий дроссель (ограничивает скорость нарастания тока) и коротнуть выход модуля, то модулю придет «хана». Если у вас модуль iramX, шансы есть. А вот с IRAMS шансов ноль, проверено.
Программа занимает 4096 кБ памяти из 4098. Все сжато и оптимизировано под размер программы по максимум. Время цикла есть фиксированная величина равная 10 мс.
На данный момент всё вышеописанное работает и испытано.
Если использовать кварц на 20 МГц, то привод получится 10-400 Гц; темп разгона 10-100 Гц/сек; частота ШИМа возрастет до 10кГц; время цикла упадет до 5мс.
Забегая вперед следующий частотный преобразователь будет реализован на ATmegа64, иметь разрядность ШИМ не 8, а 10 Бит, иметь дисплей и множество параметров.
Ниже смотрите видео настройки привода, проверки защиты перегрева, демонстрации работы (использую двигатель 380 В 50 Гц, а настройки для 220 В 50 Гц). Так сделал специально, чтобы проверить как работает ШИМ с минимальным заданием.)
Список радиоэлементов
| Обозначение | Тип | Номинал | Количество |
|---|---|---|---|
| DD1 | МК AVR 8-бит |
ATmega48 |
1 |
| DD2 | Микросхема | IRAMS10UP60B | 1 |
| DD3-DD8 | Оптопара |
PC817 |
6 |
| DD9 | ИС буфера, драйвера |
SN7404 |
1 |
| DD10 | Линейный регулятор |
LM7805 |
1 |
| VT1 | Биполярный транзистор |
2N2222 |
1 |
| D1 | Диодный мост | 1 | |
| D2-D7 | Диод | m7 | 6 |
| D8 | Защитный диод |
P6KE16A |
1 |
| LD1 | Светодиод | 1 | |
| С1-С6 | Конденсатор | 0.1 мкФ | 6 |
| С7, С8 | Конденсатор | 18 пФ | 2 |
| С9-С11 | Конденсатор | 4.7 мкФ | 3 |
| С12 | Электролитический конденсатор | 560 мкФ 400 В | 1 |
| С13, С14 | Электролитический конденсатор | 100 мкФ 50 В | 2 |
| С15 | Конденсатор | 1 мкФ | 1 |
| Р1-Р4 | Переменный резистор | 10 кОм | 4 |
| Р5 | Переменный резистор | 2 кОм | 1 |
| R5-R10 | Резистор |
220 Ом |
6 |
| R12, R16-R22, R28 | Резистор |
1.8 кОм |
9 |
| R13 | Резистор |
300 Ом |
1 |
| R23 | Резистор |
2 кОм 8 Вт |
1 |
| R24 | Резистор |
47 кОм |
1 |
| R25-R27 | Резистор |
30 кОм 2 Вт |
3 |
| R29 | Резистор |
1 кОм |
1 |
| ZQ1 | Кварцевый резонатор | 10 МГц | 1 |
| F1 | Предохранитель | 5 А 250 VAC | 1 |
| К1 | Реле | 1 | |
| J1 | Джампер | 1 | |
| В1 | Выключатель | 1 | |
| М1 | 3-х фазный двигатель | 1 |
Прикрепленные файлы к варианту 1
- Программа ШИММ1.0r для PIC16F628(A)
- Плата управления в SPLANe
Прикрепленные файлы к варианту 2
- Сила с мозгами V1_2(1).lay (126 Кб)
- Сила с мозгами V1_2_1.lay (134 Кб)
Источники: radiokot.ru, cxem.net
РадиоКот >Схемы >Цифровые устройства >Защита и контроль >
Частотный преобразователь
Всем здравствуйте. Вот решил написать статейку про асинхронный привод и преобразователь частоты, который я изготавливал. Моему товарищу надо было крутить пилораму, и крутить хорошо. А сам я занимался импульсной электроникой и сразу предложил ему частотник. Да, можно было купить фирмовый преобразователь, и мне приходилось с ними сталкиваться, параметрировать, но захотелось своего, САМОДЕЛАШНОГО! Да и привод циркулярки к качеству регулирования скорости не критичен, только вот к ударным нагрузкам и к работе в перегрузе должен быть готов. Также максимально-простое управление с помощью пары кнопок и никаких там параметров.
Основные достоинства частотнорегулируемого привода (может для кого-то повторюсь):
Формируем из одной фазы 220В полноценные 3 фазы 220В со сдвигом 120 град., и имеем полный вращающий момент и мощность на валу.
Увеличенный пусковой момент и плавный пуск без большого пускового тока
Отсутствует замагничивание и лишний нагрев двигателя, как при использовании конденсаторов.
Возможность легко регулировать скорость и направление, если необходимо.
Вот какая схемка собралась:

3-фазный мост на IGBT транзисторах c обратными диодами (использовал имеющиеся G4PH50UD) управляется через оптодрайвера HCPL 3120 (бутстрепная схема запитки) микроконтроллером PIC16F628A. На входе гасящий конденсатор для плавного заряда электролитов DC звена. Затем его шунтирует реле и на микроконтроллер одновременно приходит логический уровень готовности. Также имеется триггер токовой защиты от к.з. и сильной перегрузки двигателя. Управление осуществляют 2 кнопки и тумблер изменения направления вращения.
Силовая часть мною была собрана навесным монтажом. Плата контроллера отутюжина вот в таком виде:

Параллельные резисторы по 270к на проходных затворных конденсаторах (забыл под них места нарисовать) припаял сзади платы, потом хотел заменить на смд но так и оставил.
Есть внешний вид этой платы, когда уже спаивал:

С другой стороны

Для питания управления был собран типовой импульсный обратноходовой (FLAYBACK) блок питания.
Его схема:

Можно использовать любой блок питания на 24В, но стабилизированный и с запаздыванием пропадания выходного напряжения от момента пропажи сетевого на пару тройку секунд. Это необходимо чтобы привод успел отключиться по ошибке DC. Добивался установкой электролита С1 большей ёмкости.
Теперь о самом главном…о програме микроконтроллера. Программирование простых моргалок для меня сложности не представляло, но тут надо было поднатужить мозги. Порыскав в нете, я не нашёл на то время подходящей информации. Мне предлагали поставить и специализированные контроллеры, например контроллер фирмы MOTOROLA MC3PHAC. Но хотелось, повторюсь, своего. Принялся детально разбираться с ШИМ модуляцией, как и когда нужно открыть какой транзистор… Открылись некие закономерности и вышел шаблон самой простой программы отработки задержек, с помощью которой можно выдать удовлетворительно синусовую ШИМ и регулировать напряжение. Считать ничего контроллер конечно не успевал, прерывания не давали что надо и поэтому я идею крутого обсчёта ШИМ на PIC16F628A сразу отбросил. В итоге получилась матрица констант, которую отрабатывал контроллер. Они задавали и частоту и напряжение. Возился честно скажу, долго. Пилорама уже во всю пилила конденсаторами, когда вышла первая версия прошивки. Проверял всю схему сначала на 180 ватном движке вентиляторе. Вот как выглядела «экспериментальная установка»:
Первые эксперименты показали, что у этого проекта точно есть будущее.
Программа дорабатывалась и в итоге после раскрутки 4кВТ-ного движка её можно было собирать и идти на лесопилку.
Товарищ был приятно удивлён, хоть и с самого начала относился скептически. Я тоже был удивлён, т.к. проверилась защита от к.з. (случайно произошло в борно двигателя). Всё осталось живо. Двигатель на 1,5кВт 1440об/мин легко грыз брусы диском на 300мм. Шкивы один к одному. При ударах и сучках свет слегка пригасал, но двигатель не останавливался. Ещё пришлось сильно подтягивать ремень, т.к. скользил при сильной нагрузке. Потом поставили двойную передачу.
Сейчас ещё дорабатываю программу она станет еще лучше, алгоритм работы шим чуть сложнее, режимов больше, возможность раскручиваться выше номинала…а тут снизу та самая простая версия которая работает на пиле уже около года.
Её характеристики:
Выходная Частота: 2,5-50Гц, шаг 1,25Гц; Частота ШИМ синхронная, изменяющаяся. Диапазон примерно 1700-3300Гц.; Скалярный режим управления U/F, мощность двигателя до 4кВт.
Минимальная рабочая частота после однократного нажатия на кнопку ПУСК(RUN) — 10Гц.
При удержании кнопки RUN происходит разгон, при отпускании частота остаётся та, до которой успел разогнаться. Максимальная 50Гц- сигнализируется светодиодом. Время разгона около 2с.
Светодиод «готовность» сигнализирует о готовности к запуску привода.
Реверс опрашивается в состоянии готовности.
Режимов торможения и регулирования частоты вниз нет, но они в данном случае и не нужны.
При нажатии Стоп или СБРОС происходит остановка выбегом.
На этом пока всё. Спасибо, кто дочитал до конца.
Файлы:
Программа ШИММ1.0r для PIC16F628(A)
Плата управления в SPLANe
Все вопросы в
Форум.
|
Как вам эта статья? |
Заработало ли это устройство у вас? |
Способы увеличения частоты тока
Наиболее популярным на сегодняшний день методом увеличения (или уменьшения) частоты тока является применение частотного преобразователя. Частотные преобразователи позволяют получить из однофазного или трехфазного переменного тока промышленной частоты (50 или 60 Гц) ток требуемой частоты, например от 1 до 800 Гц, для питания однофазных или трехфазных двигателей.
Наряду с электронными частотными преобразователями, с целью увеличения частоты тока, применяют и электроиндукционные частотные преобразователи, в которых например асинхронный двигатель с фазным ротором работает частично в режиме генератора. Еще есть умформеры — двигатели-генераторы, о которых также будет рассказано в данной статье.

Электронные преобразователи частоты
Электронные преобразователи частоты позволяют плавно регулировать скорость синхронных и асинхронных двигателей благодаря плавному повышению частоты на выходе преобразователя до заданного значения. Наиболее простой подход обеспечивается заданием постоянной характеристики V/f, а более прогрессивные решения используют векторное управление.
Частотные преобразователи, обычно, включают в себя выпрямитель, который преобразует переменный ток промышленной частоты в постоянный; после выпрямителя стоит инвертор, в простейшем виде — на базе ШИМ, который преобразует постоянное напряжение в переменный ток нагрузки, причем частота и амплитуда задаются уже пользователем, и эти параметры могут отличаться от сетевых параметров на входе в большую или в меньшую сторону.
Выходной блок электронного преобразователя частоты чаще всего представляет собой тиристорный или транзисторный мост, состоящий из четырех или из шести ключей, которые и формируют требуемый ток для питания нагрузки, в частности — электродвигателя. Для сглаживания помех в выходном напряжении, на выходе добавляют EMC-фильтр.
Как говорилось выше, электронный преобразователь частоты использует для своей работы в качестве ключей тиристоры или транзисторы. Для управления ключами применяется микропроцессорный модуль, служащий контроллером, и одновременно выполняющий ряд диагностических и защитных функций.
Между тем, частотные преобразователи бывают все таки двух классов: с непосредственной связью, и с промежуточным звеном постоянного тока. При выборе между этими двумя классами взвешивают достоинства и недостатки того и другого, и определяют целесообразность того или иного для решения насущной задачи.
С непосредственной связью
Преобразователи с непосредственной связью отличаются тем, что в них используется управляемый выпрямитель, в котором группы тиристоров поочередно отпираясь коммутируют нагрузку, например обмотки двигателя, прямо к питающей сети.
В результате на выходе получаются кусочки синусоид сетевого напряжения, а эквивалентная частота на выходе (для двигателя) становится меньше сетевой, в пределах 60% от нее, то есть от 0 до 36 Гц для 60 Гц входа.
Такие характеристики не позволяют в широких пределах варьировать параметры оборудования в промышленности, от того и спрос на данные решения низок. Кроме этого незапираемые тиристоры сложно управляются, стоимость схем становится выше, да и помех на выходе много, требуются компенсаторы, и как следствие габариты высокие, а КПД низкий.
С звеном постоянного тока
Гораздо лучше в этом отношении частотные преобразователи с ярко выраженным звеном постоянного тока, где сначала переменный сетевой ток выпрямляется, фильтруется, а затем снова схемой на электронных ключах преобразуется в переменный ток нужной частоты и амплитуды. Здесь частота может быть значительно выше. Безусловно, двойное преобразование несколько снижает КПД, зато выходные параметры по частоте как раз соответствуют требованиям потребителя.
Чтобы на обмотках двигателя получить чистый синус, используют схему инвертора, в котором напряжение нужной формы получается благодаря широтно-импульсной модуляции (ШИМ). Электронными ключами здесь служат запираемые тиристоры или IGBT-транзисторы.
Тиристоры выдерживают большие импульсные токи, по сравнению с транзисторами, поэтому все чаще прибегают именно к тиристорным схемам, как в преобразователях с непосредственной связью, так и в преобразователях с промежуточным звеном постоянного тока, КПД получается до 98%.
Справедливости ради отметим, что электронные преобразователи частоты для питающей сети являются нелинейной нагрузкой, и порождают в ней высшие гармоники, это ухудшает качество электроэнергии.
С целью преобразования электроэнергии из одной ее формы в другую, в частности — для повышения частоты тока без необходимости прибегать к электронным решениям, применяют так называемые умформеры — двигатели-генераторы. Такие машины функционируют подобно проводнику электроэнергии, однако на самом деле прямого преобразования электроэнергии, как например в трансформаторе или в электронном частотном преобразователе, как такового не происходит.
Здесь доступны следующие возможности:
постоянный ток может быть преобразован в переменный более высокого напряжения и требуемой частоты;
постоянный ток может быть получен из переменного;
прямое механическое преобразование частоты с повышением или понижением оной;
получение трехфазного тока требуемой частоты из однофазного тока сетевой частоты.
В каноническом виде мотор-генератор представляет собой электродвигатель, вал которого напрямую соединен с генератором. На выходе генератора устанавливают стабилизирующее устройство для улучшения частотных и амплитудных параметров получаемой электроэнергии.
В некоторых моделях умформеров якорь содержит обмотки и моторные и генераторные, которые гальванически развязаны, и выводы которых соединены соответственно с коллектором и с выходными контактными кольцами.
В других вариантах встречаются общие обмотки для обоих токов, например для преобразования числа фаз коллектора с контактными кольцами нет, а просто от обмотки статора делаются отводы для каждой из выходных фаз. Так асинхронная машина преобразует однофазный ток в трехфазный (тождественно в принципе увеличению частоты).
Итак, мотор-генератор позволяет преобразовать род тока, напряжение, частоту, количество фаз. До 70-х годов в военной технике СССР использовались преобразователи данного типа, где они питали, в частности, устройства на лампах. Однофазные и трехфазные преобразователи питались постоянным напряжением 27 вольт, а на выходе получалось переменное напряжение 127 вольт 50 герц однофазное или 36 вольт 400 герц трехфазное.
Мощность таких умформеров достигала 4,5 кВА. Подобные машины использовались и в электровозах, где постоянное напряжение 50 вольт преобразовывалось в переменное 220 вольт частотой до 425 герц для питания люминесцентных ламп, и 127 вольт 50 герц для питания бритв пассажиров. Первые ЭВМ часто использовали для своего питания умформеры.
По сей день кое-где еще можно встретить умформеры: на троллейбусах, в трамваях, в электропоездах, где их устанавливали с целью получения низкого напряжения для питания цепей управления. Но нынче они уже вытеснены почти полностью полупроводниковыми решениями (на тиристорах и транзисторах).
Преобразователи типа мотор-генератор ценны рядом достоинств. Во-первых это надежная гальваническая развязка выходной и входной силовых цепей. Во-вторых, на выходе получается чистейший синус без помех, без шумов. Устройство очень просто по своей конструкции, от того и обслуживание довольно бесхитростно.
Это легкий способ получения трехфазного напряжения. Инерция ротора сглаживает броски тока при резком изменении параметров нагрузки. И конечно, здесь очень просто осуществлять рекуперацию электроэнергии.
Не обошлось и без недостатков. Умформеры имеют движущиеся части, от того и ресурс их ограничен. Масса, вес, обилие материалов, и как следствие — высокая стоимость. Шумная работа, вибрации. Необходимость в частой смазке подшипников, чистке коллекторов, замене щеток. КПД в пределах 70%.
Несмотря на недостатки, механические моторы-генераторы по сей день применяются в электроэнергетической отрасли для преобразования больших мощностей. В перспективе моторы-генераторы вполне могут помочь согласованию сетей с частотами 60 и 50 Гц, либо для обеспечения сетей с повышенными требованиями по качеству электроэнергии. Питание обмоток ротора машины в данном случае возможно от твердотельного преобразователя частоты небольшой мощности.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Источник
Как трансформатором изменить частоту
Рейтинг 1.8/5 (59 голосов)

Трансформаторы для преобразования частоты
С использованием трансформаторов выполняют схемы для удвоения и утроения частоты питающего напряжения.
Удвоение частоты осуществляют с помощью трансформатора, магнитная система которого состоит из двух независимых магнитопроводов α и β (рис. 1). Первичная обмотка, имеющая число витков w1 и включаемая в сеть с частотой f1 охватывает оба магнитопровода. Магнитопроводы α и β обмоткой О, состоящей из двух частей, подмагничиваются таким образом, что усиливается поток магнитопровода α и ослабляется поток магнитопровода β (рис. 1). В каждом магнитопроводе МДС, создаваемая этой обмоткой, равна F. В правом квадранте на рис. 2 построены магнитные характеристики Фα=f(i1) и Фβ=f(i1) магнитопроводов с учетом действия МДС F. Там же показана зависимость суммарного магнитного потока Фα+ Фβ от тока первичной обмотки i1. Магнитный поток Фα+Фβ=Ф сцеплен с первичной обмоткой и наводит в ней ЭДС e1 (эта ЭДС практически равна и направлена противоположно приложенному напряжению u1).

Вторичная обмотка с числом витков w2 состоит из двух частей, расположенных на разных магнитопроводах. Эти части обмотки включены встречно, поэтому результирующее потокосцепление вторичной обмотки пропорционально разности магнитных потоков (Фα — Фβ). Зависимость (Фα — Фβ) = f(i1) также показана на рис. 2.
Если к первичной обмотке приложить синусоидальное напряжение u1, то магнитный поток Ф = Фα+Фβ будет практически синусоидальным и изменяться во времени с частотой f1 (левый квадрант на рис. 2). Изменение во времени магнитного потока, сцепленного со вторичной обмоткой (Фα — Фβ), можно получить построением по точкам 1-2-3-4. Эта зависимость имеет пульсирующий характер с частотой пульсаций, равной 2f1. Индуктируемая во вторичной обмотке ЭДС e2 будет пропорциональна d(Фα — Фβ)/dt и иметь частоту 2f1.
Для снижения падения напряжения в цепи вторичной обмотки при нагрузке последовательно с этой обмоткой включают конденсатор С, компенсирующий индуктивность обмотки. Регулирование напряжения производится изменением тока в подмагничивающей обмотке.
Утроение частоты с помощью трансформаторов можно осуществить, используя схему, показанную на рис. 3.

Первичные обмотки трех однофазных трансформаторов соединяются звездой и подключаются к трехфазной сети с частотой f1. Вторичные обмотки этих трансформаторов соединяются между собой последовательно. В магнитопроводе каждой фазы трехфазной группы однофазных трансформаторов, первичные обмотки которых соединены звездой, при насыщении магнитной цепи возникают значительные третьи гармонические составляющие магнитного потока. Эти составляющие потока наводят во вторичных обмотках ЭДС тройной частоты е3. При последовательном соединении вторичных обмоток ЭДС тройной частоты арифметически складываются, а сумма первых гармоник ЭДС равна нулю. Таким образом, на выводах вторичной обмотки будет действовать напряжение U3≈3E3 с частотой 3f1. Емкость С, включенная в цепь вторичной обмотки, служит для уменьшения падения напряжения при нагрузке.
Источник
Устройство и принцип работы трансформаторов
Как работает трансформатор
Трансформатор работает за счет взаимоиндукции. Для начала разберем, что такое индукция.
Что такое индукция
Если по проводу пустить электрический ток, то возникнет магнитное поле. 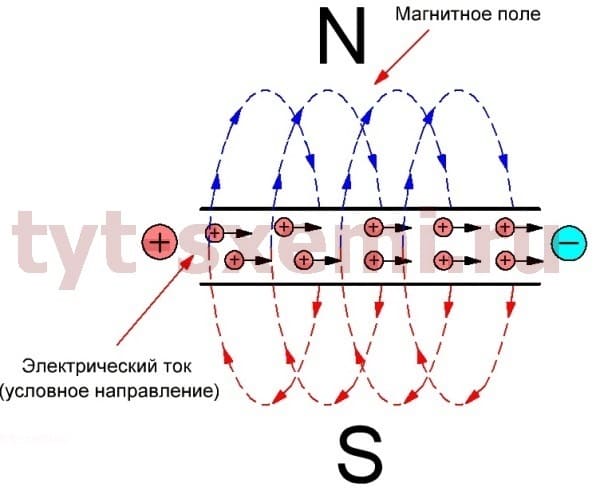
Магнитное поле — неотъемлемая часть электрического. И в магнитном поле сохраняется энергия электрического.
У постоянных магнитов наличие магнитного поля объясняется направлением «доменов в одну сторону». Т.е. у каждого отдельно взятого атома есть свое маленькое магнитное поле. У постоянных магнитов эти маленькие магнитные поля направлены в одну сторону. Поэтому у постоянного магнита такое сильное магнитное поле.
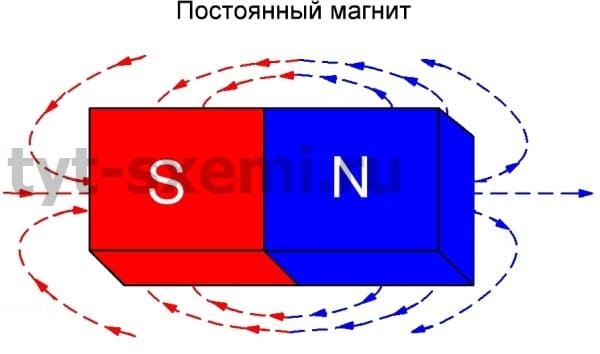
И другие материалы можно намагнитить, т.е. сделать так, чтобы магнитные поля были направлены в одну сторону. Так получится «искусственно созданный» магнит.
Кстати, среди ремонтников очень популярен магнит, который намагничивает и размагничивает отвертки. Таким отвертками удобно пользоваться, поскольку маленькие болтики и винтики останутся на отвертке и не упадут в случае неосторожного движения. 
А индуктивность — это способность материала накапливать магнитное поле, когда по этому материалу течет электрический ток.
Чем больше материал может создать магнитное поле, тем выше его индуктивность.
Магнитное поле можно увеличить, если сделать катушку.

Достаточно взять проволоку, намотать ее на каркас. И магнитные поля витков будут складываться. 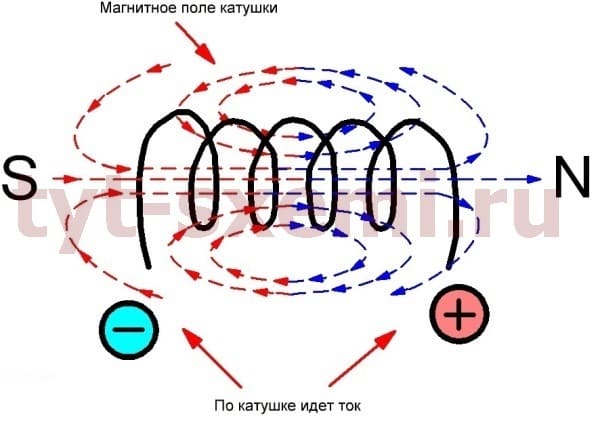
Это и есть катушка индуктивности.
Провод в катушке индуктивности должен быть изолирован. Потому, что если хотя бы один виток будет в коротком замыкании с другим, то магнитное поле будет неравномерным. Будет межвитковое замыкание, из-за которого магнитное поле потеряет свою равномерность.
Если мы подаем на катушку постоянный ток, то и магнитное поле будет постоянным. Оно не будет меняться. А что если отключить катушку от источника? Тогда наступит явление самоиндукции. Так как ток уменьшается, то магнитное поле больше нечем поддерживать. И вся так энергия, которая была в магнитном поле, переходит в электрическую.
Изменение магнитного поля создает электрическое поле.
Увеличение индуктивности сердечником
А как увеличить индуктивность? Только с помощью количества витков и диаметром провода? На индуктивность еще влияет окружающая среда. Воздух — не самый лучший материал для накопления или передачи магнитного поля. У него низкая магнитная проницаемость. Тем более, при изменении плотности и температуры воздуха, это значение меняется. Поэтому, для увеличения индуктивности используют ферромагнетики. К ним относят железо, никель, кобальт и др.
Если сделать сердечник в центре катушки из таких материалов, то можно многократно повысить индуктивность катушки.
Из ферромагнетиков делают сердечники (магнитопроводы). В основном используют электротехническую сталь, которую специально делают для этих целей. 
Кстати, теперь намного проще регулировать индуктивность с сердечником. Достаточно плавно передвигать сердечник внутри катушки, и индуктивность будет плавно меняться. Это удобнее, чем двигать витки друг от друга.
Взаимоиндукция и принцип передачи тока
Раз можно накопить энергию в катушке за счет магнитного поля, то можно передать эту энергию в другую катушку.
Допустим, есть две одинаковые катушки индуктивности. Одна подключена к питанию, другая нет.
При подключении питания, у первой катушки возникнет магнитное поле. И если приблизить вторую катушку к первой, у второй катушки индуцируется ЭДС за счет магнитного поля первой.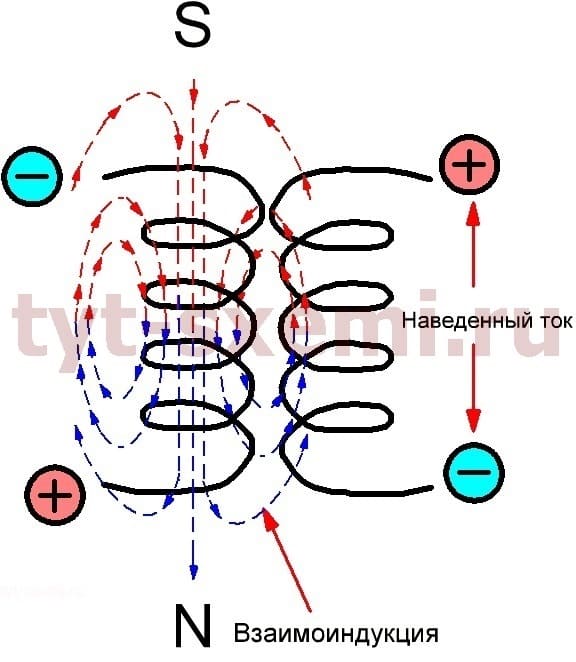
Но ЭДС второй катушки будет не долгим явлением. Если на первую катушку подается постоянное напряжение, то и магнитное поле будет постоянным.
А электрический ток возникает только при переменном магнитное поле. Поэтому, ток во второй катушке сразу исчезнет, как только стабилизируется магнитное поле.
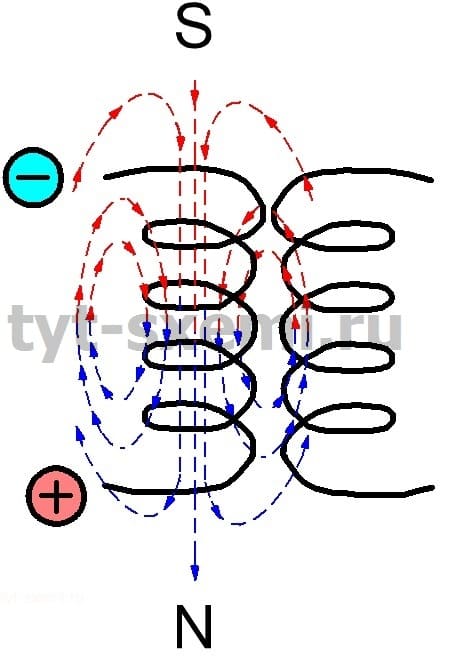
Если поменяем полярность на первой катушке, то и изменится ее магнитное поле. А это значит, что оно будет изменяться и во второй катушке. Это снова индуцирует ток во второй катушке, но не надолго. 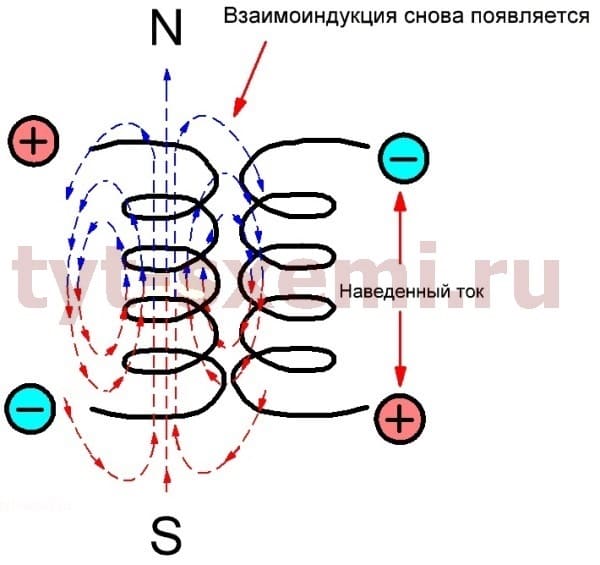
Чтобы непрерывно можно было передать ток от первой катушки ко второй, нужен переменный источник тока. Переменный ток создает переменное магнитное поле. А переменное магнитное поле проницая проводник создает в нем переменный наведенный ток.
И поэтому, если на первую катушку будет подано переменное напряжение, то возникнет и переменное магнитное поле. Это магнитное поле индуцирует во второй катушке электромагнитное поле, и ток будет во второй катушке.
Такое явление называют взаимоиндукцией. Когда за счет индуктивности ток из одной части цепи можно передать в другую используя электромагнитное поле.
Многие путают электромагнитную индукцию и взаимоиндукцию. Но это разные явления, хоть и принцип действия во многом схож.
Кроме переменного тока можно использовать и импульсный ток, в котором плюс и минус не меняются местами. Главное выполнять правило — ток должен менять свое значение. И тогда будет переменное магнитное поле. ![]()
Кстати, когда работают блоки питания и светильники, издаваемый гул от них — это звук от катушек или их сердечников. Это из-за индукции. Магнитное поле из-за разного направления в катушках частично сдвигает витки и сердечники, отсюда и появляется тот самый звон. Это касается и электродвигателей. Поэтому такие детали заливают смолой или компаундом, чтобы уменьшить издаваемый звук.
Устройство трансформатора
А если катушки будут разными? Тогда можно преобразовать напряжение из одной величины в другую. Так и работает трансформатор. Трансформатор преобразует напряжение с первичной обмотки в напряжение другой величины на вторичной обмотке.
Трансформатор работает только с переменным, импульсным или любым другим током, у которого изменяется значение со временем.
Трансформатор преобразует ток и напряжение, но он не позволяет увеличить мощность. Даже наоборот, из-за нагрева он немного забирает мощность. И не смотря на это, его КПД может доходить вплоть до 99%.
Классический трансформатор
Разберем устройство классического трансформатора. ![]()
Основная его функция — это снижение или повышение напряжения для блока питания. Работает за счет сетевого напряжения и низкой частоты (от 50 Гц). Частота переменного тока важна для расчетов.
Классический трансформатор состоит из первичной и вторичной обмотки, а также сердечника (магнитопровода). ![]()
На первичную обмотку подается то напряжение, которое нужно преобразовать. А со вторичной обмотки снимают то напряжение, которое получилось за счет взаимоиндукции. Сердечник увеличивает магнитный поток.
Как же происходит преобразование? Все просто. Можно рассчитать индуктивность первичной и вторичной обмотки. Если нужно низкое напряжение, то вторичная обмотка имеет меньше витков, чем первичная. Раз первичная работает за счет сетевого напряжения, то и рассчитывается на 220 В с небольшим запасом из-за колебаний сети.
Напряжение на вторичной обмотке сдвинуто по фазе относительно первичной. Это связано с явлением взаимоиндукции. На графике показана примерная разница по синусоиде.
![]()
Трансформаторы могут быть источниками фазовых искажений. Они изменяют сигналы по фазе из-за индуктивности, как показано на графике выше.
На принципиальных схемах классический трансформатор обозначается двумя катушками с сердечником. ![]()
Соответственно, если у трансформатора несколько вторичных обмоток, то и количество катушек на схеме будет другим.
Количество обмоток на трансформаторе может быть любым. Могут быть и несколько первичных и вторичных обмоток. А еще есть трансформаторы с общей точкой для двуполярного питания.
Кстати, если вы думаете, что у трансформатора нет сторон, как у диодов или транзисторов, то вы ошибаетесь. У трансформатора тоже есть начало обмотки и конец обмотки. На принципиальных схемах обозначение начала обмотки обозначается точкой и цифрами. ![]()
Зачем это надо? Дело в том, что магнитная индукция имеет свое направление, и на этом заложен весь принцип работы схемы. Если подключить обмотку не так, как показано на схеме, то вся схема перестанет работать как изначально задумывалось. Еще как пример можно привести трёхфазные электродвигатели. У них и вовсе для правильной работы важно знать начало и конец обмотки.
Коэффициент трансформации
У трансформаторов есть такое понятие, как коэффициент трансформации. Это отношение его входных и выходных характеристик (отношение количества витков первичной обмотки к вторичной).
Например, если трансформатор понижающий, с 220 В до 12 В, то его коэффициент больше единицы, то есть К 1. У разделительного коэффициент равен 1.
От чего зависит мощность трансформатора
При расчете учитываются следующие параметры:
- Размеры магнитопровода (сердечника);
- Количество витков;
- Сечение провода;
- Количество обмоток;
- Частота работы.
И все эти значения меняются в зависимости от расчетной мощности и требуемых параметров.
Типы классических трансформаторов
Классические трансформаторы по типу магнитопровода и расположению катушек разделяются на три основных вида:
Броневые чаще всего состоят из Е-пластин (или Ш, как многие называют), которые изолируются друг от друга лаком. В этом типе катушки заключены внутри сердечника как под броней. Поэтому они так и называются.
А еще сердечник может быть ленточным, но расположение катушек от этого не меняется.
Однако в плане эффективности преобразования мощности — это не самый лучший вариант. Магнитный поток получается неравномерным. Да и броневой трансформатор более уязвим к наводкам и помехам извне. Но зато у такого типа есть неоспоримое преимущество. Катушка наматывается достаточно просто, а сборка магнитопровода не составляет особого труда.
![]()
Такие трансформаторы чаще всего применяются в мелкогабаритной бытовой технике. Например, их можно часто встретить в мощных звуковых колонках от компьютеров. ![]()
Стержневые отличаются особенностями расположения катушек и конструкцией магнитопровода. Такой тип трансформаторов еще называют П-образным. Это связано с тем, что конструктивно сердечник такого трансформатора ленточный, и он собирается из узкой ленты электротехнической стали. И чтобы установить катушки в сердечник, его делают из двух форм в виде буквы П.
После установки двух катушек на первую часть сердечника, вторая часть замыкает ее при окончательной сборке.
![]()
Этот тип противоположность броневому. У такого трансформатора обмотки находятся снаружи, а у броневого наоборот, внутри.
Тороидальные трансформаторы являются самыми эффективными, и в тоже время самыми сложными в изготовлении. Сложности изготовления заключаются в том, что сердечник имеет форму тора. Он замкнут, и поместить катушки в сердечник так просто как в стержневых и броневых не получится. ![]()
Можно и разъединить трансформаторное железо на две полукруглые части (как П-образный трансформатор), но обмотку не получится намотать. Она будет не такая плотная и ровная.
Поэтому наматывают витки сразу на сердечник. А это намного дольше, да и автоматизировать такой процесс сложнее. Соответственно, и цена на такой трансформатор будет выше.
Режимы работы трансформаторов
Есть три основных режима:
1. Режим холостого хода. Первичная обмотка подключена к сети, но вторичная обмотка не подключена к нагрузке. ![]()
2. Режим нагрузки. Это рабочий режим. Первичная обмотка преобразует сетевое напряжение, а вторичная принимает его и подает в нагрузку. ![]()
3. Режим короткого замыкания. Вторичная обмотка находится в коротком замыкании. Это аварийный режим для большинства трансформаторов. В этой ситуации он может быстро нагреться и выйти из строя. ![]()
Все режимы и их критические параметры также зависят и от типа трансформатора. Например, для трансформатора тока, холостой режим является аварийным.
Импульсные трансформаторы
У импульсных трансформаторов другой тип действия. Они преобразуют напряжение до высоких частот с помощью схемы управления. Конечно из-за этого усложняется схема работы, но это позволяет накапливать большое количество энергии в катушках. Большое преимущество перед классическим трансформаторов — это компактность. Если классический трансформатор на 100 Вт будет большим, то импульсный в десятки раз меньше. ![]()
Из недостатков импульсных блоков питания — это наличие импульсных помех. Но и эти помехи удается сглаживать. Поэтому, все блоки питания в компьютерах, ноутбуках и зарядных устройствах чаще всего сделаны на импульсных трансформаторах.
Еще импульсные трансформаторы питают лампы подсветки в мониторах, которые подсвечивают матрицу. Это касается TFT мониторов. ![]()
Отличия импульсных трансформаторов от классических
Тезисно можно выделить несколько различий:
- Частота работы;
- Состав сердечника;
- Размеры;
- Схема работы;
- Стоимость.
А еще, как правило, у импульсных трансформаторов больше обмоток, чем у классических.
Почему сердечник не делают сплошным
Сердечники (магнитопроводы) делают из железных пластин потому, что во время работы появляются токи Фуко. Их называют еще вихревыми токами. Эти токи появляются от наводок обмоток в сердечнике. В итоге сердечник может перегреться, и даже расплавить катушки.
Поэтому, для трансформаторов низкой частоты делают сердечники из изолированных друг от друга пластин.
Пластины могут быть покрыты лаком, или изолированы бумагой между собой. Это уменьшает короткие замыкания в пластинах.
А можно ли сделать сердечник сплошным? Да, так можно сделать. И у импульсных трансформаторов сердечники сделаны из ферромагнитного порошка, у которого частицы друг от друга изолированы. Он называется ферродиэлектрическим сердечником. Но это возможно только на высоких частотах, на которых работает импульсный трансформатор.
Что делает трансформатор
У трансформатора много полезных и важных функций:
- Передает электричество на расстояние. Он способен повышать переменное напряжение. Это помогает передавать переменный ток на большие расстояния. Так как у проводов тоже есть сопротивление, от источника тока требуется высокое напряжение, чтобы преодолеть сопротивление проводов. Поэтому, трансформаторы незаменимы в электросетях, где они повышают напряжение до десятки тысяч вольт. Еще возле электростанций, которые вырабатывают электрический ток, стоят распределительные трансформаторы. Они повышают напряжение для передачи их потребителям. А возле потребителей стоит понижающий трансформатор, который уменьшает напряжение до 220 В 50 Гц.
![]()
- Питает электронику. Трансформатор — это часть блока питания. Он понижает входное сетевое напряжение, которое затем выпрямляется диодным мостом, фильтруется и подается на плату. По сути, он используется практически в любом блоке питания и преобразователе.
![]()
- Питает радиолампы и электронно-лучевые трубки. Для радиоламп нужен большой спектр напряжений. Это и 12 В и 300 В и др.
![]()
- Для этих целей и делают трансформаторы, которые понижают и повышают сетевое напряжение. Это делается за счет разных обмоток на одном сердечнике. Разновидностью ламп являются электронно-лучевые трубки (ЭЛТ). Они используются в электронных микроскопах, где с помощью пучка электронов можно получить детальные изображения микроскопических поверхностей. Для них нужны высокие напряжения, порядка нескольких десятков тысяч киловольт. Это нужно для того, чтобы в вакуумной трубке можно было разогнать пучок электронов до больших скоростей. Электрон в вакууме может повышать скорость своего передвижения за счет повышения напряжения. И здесь, кстати, используется импульсный трансформатор. Он повышает напряжение за счет работы ШИМ (широтно-импульсной модуляции). Такие трансформаторы называются строчными (или развертки).
![]()
Это название неспроста, так как такой трансформатор выполняет функцию строчной развертки. По сути кинескоп — это и есть электронно-лучевая трубка. Поэтому, для работы телевизоров, где используется кинескоп, нужен строчный трансформатор.
- Согласует сопротивления. В усилителях звука согласование источника и потребителя играет важную роль. Поэтому, есть согласующие трансформаторы, которые позволяют передать максимум мощности в нагрузку. Если бы не было такого трансформатора, то лаповые усилители, которые были рассчитаны на 100 Вт, выдавали бы менее 50 Вт в нагрузку.
Например, выход усилителя 2 кОм, а трансформатор согласует сопротивление и понижает напряжение для щадящей работы динамиков. А на его вторичной обмотке сопротивление всего несколько десятков Ом. ![]()
- Для безопасности. Трансформатор создает гальваническую развязку между сетью и блоком питания. Это последний рубеж безопасности в блоке питания, если что-то пойдет не так. Будет время для срабатывания предохранителя. Или же катушки и магнитопровод расплавятся, но потребителю не дадут сетевую нагрузку. Он физически не связан с сетью 220 В. Связь есть только с помощью магнитного поля (взаимоиндукции). И если трансформатор рассчитан на 100 Вт, то он сможет выдать только 100 Вт.
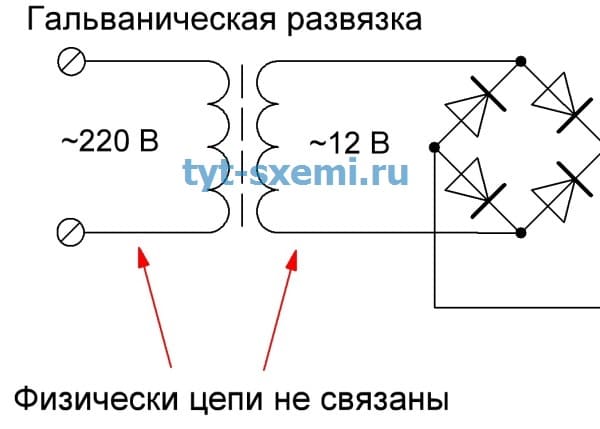
Поэтому, потребитель будет защищен от опасных высоких токов. Именно из-за этого бестрансформаторные блоки питания считаются опасными.
- Деталь оружия. В электрошокерах используются высокие напряжения. И их помогает форматировать высоковольтный трансформатор. А еще он используется в некоторых схемах Гаусс пушки.
Вопросы об устройстве трансформатора
-Почему зазор между катушками делается минимальным?
Это делается для лучшего контакта магнитных полей. Если зазор будет большим — то и эффективность трансформатора будет низкая.
-А можно ли сделать трансформатор без сердечника аналогичный мощности с сердечником?
Да, но тогда придется увеличивать количество витков, чтобы увеличить магнитный поток. Например, с сердечником у обмоток витки могут быть по несколько тысяч. А без сердечника придется увеличивать магнитный поток за счет витков. И количество витков будет по несколько десяток тысяч. Это не только увеличивает размеры катушек, но и снижает их эффективность и увеличивает шансы перегрева.
-Можно ли подключить понижающий трансформатор как повышающий?
Если у вас есть трансформатор, который понижает сетевое напряжение с 220 В в 12 В, то его можно подключить как повышающий. То есть, вы можете подать на него переменное напряжение 12 В на вторичную обмотку и получить повышенное на первичной 220 В.
-А что будет, если на вторичную обмотку понижающего трансфоратора подать сетевое напряжение?
Тогда обмотка сгорит. Её сопротивление, количество витков и сечение провода не рассчитаны на такие напряжения. ![]()
-Можно ли сделать трансформатор самостоятельно своими руками в домашних условия?
Да, это вполне реально. И многие радиолюбители и электронщики этим занимаются. А некоторые еще и зарабатывают. продавая готовую продукцию. Но стоит помнить о том, что это долгий, сложный и не простой труд. Нужны качественные материалы. Это трансформаторное железо, эмалированные медные провода различного сечения, изоляционные материалы. 
Все материалы должны быть высокого качества. Если медный провод будет с плохой изоляцией, то возможно межвитковое замыкание, которое неминуемо приведет к перегреву. А для начала нужно рассчитать все параметры будущего трансформатора. Это можно сделать с помощью различных программ, которые доступны в сети. ![]()
Далее, это долгие часы сборки. Особенно если вы решили намотать тороидальные трансформатор.
![]()
Нужно плотно и равномерно наматывать витки, записывать каждый десяток, чтобы не запутаться и не изменить характеристики будущего преобразователя или блока питания.
-Что будет, если включить трансформатор без сердечника?
Так как трансформатор рассчитывался изначально с сердечником, то и преобразовать полностью напряжение он не сможет. То есть, на вторичке что-то будет, но явно не те параметры. Да и если подключите нагрузку к обмоткам без сердечника, они быстро нагреются и сгорят.
Неисправности трансформаторов
К основным неисправностям трансформаторов можно отнести:
- Коррозия и наличие ржавчины на сердечнике;
- Перегрев и нарушение изоляции;
- Межвитковое короткое замыкание;
- Деформация корпуса, обмоток и сердечника
- Попадание воды в обмотку.
Как проверить на целостность
Трансформатор можно проверить обычным мультиметром. Установите прибор в режим измерения сопротивления и проверьте обмотки. ![]()
Они не должны быть в обрыве, никогда. Если нигде обрывов нет, то можно найти первичную и вторичную обмотки при помощи измерения сопротивления. У первичной обмотки понижающего трансформатора сопротивление будет выше, чем у вторичной. Это все из-за количества витков. Чем больше витков и чем меньше диаметр провода — тем больше сопротивление обмотки.
Так же вы можете найти паспорт на свой трансформатор. В нем указываются сопротивления обмоток, и их параметры, которые нужно будет проверить мультиметром.
Безопасная проверка работы трансформатора
Если вы решили намотать свой трансформатор или проверить старый, то обязательно подключайте лампочку в разрыв цепи (последовательно!). Если что-то не так произойдет то, лампочка загорится и заберет ток на себя и сможет спасти неисправный трансформатор.
Трансформаторы много где используются. Их конструкция разная и для каждой задачи она по-своему уникальна.
Интересные факты про трансформаторы
Трансформатор — это самый эффективный преобразователь. Его КПД (коэффициент полезного действия) может доходить до 99% (силовые трансформаторы). А вот у ДВС (двигатель внутреннего сгорания), КПД обычно не выше 30%.
Самый эффективный, но в тоже время и самый сложный в изготовлении — это тороидальный трансформатор. Он эффективен благодаря расположению катушек и магнитопроводу. Это усложняет процесс изготовления, особенно в промышленных масштабах.
Источник