
Способы регулирования частоты вращения двигателей оцениваются следующими показателями: плавностью регулирования; диапазоном регулирования, определяемым отношением наибольшей частоты вращения к наименьшей; экономичностью регулирования, определяемой стоимостью регулирующей аппаратуры и потерями электроэнергии в ней.
Из (29.5) следует, что регулировать частоту вращения двигателя независимого возбуждения можно изменением сопротивления в цепи якоря, изменением основного магнитного потока Ф, изменением напряжения в цепи якоря.
![clip_image002[5]](https://electrikam.com/wp-content/uploads/2014/10/clip_image0025_thumb1.gif "clip_image002[5]") (29.5)
(29.5)
Регулирование частоты вращения ДПТ НВ введение дополнительного сопротивления в цепь якоря
Дополнительное сопротивление (реостат rд) включают в цепь якоря аналогично пусковому реостату (ПР). Однако в отличие от последнего оно должно быть рассчитано на продолжительное протекание тока.
При включении сопротивления rд в цепь якоря выражение частоты (29.5) принимает вид
 , (29.12)
, (29.12)
где ![]() — частота вращения в режиме х.х.;
— частота вращения в режиме х.х.;
![]() — изменение частоты вращения, вызванное падением напряжения в цепи якоря.
— изменение частоты вращения, вызванное падением напряжения в цепи якоря.
С увеличением rд возрастает ![]() , что ведет к уменьшению частоты вращения. Зависимость n = f(rд) иллюстрируется также и механическими характеристиками двигателя независимого возбуждения (рис. 29.4, а): с повышением rд увеличивается наклон механических характеристик, а частота вращения при заданной нагрузке на валу (M = Mном ) уменьшается. Этот способ обеспечивает плавное регулирование частоты вращения в широком диапазоне (только в сторону уменьшения частоты от номинальной), однако он неэкономичен из-за значительных потерь электроэнергии в регулировочном реостате (I2a *rД), которые интенсивно растут с увеличением мощности двигателя.
, что ведет к уменьшению частоты вращения. Зависимость n = f(rд) иллюстрируется также и механическими характеристиками двигателя независимого возбуждения (рис. 29.4, а): с повышением rд увеличивается наклон механических характеристик, а частота вращения при заданной нагрузке на валу (M = Mном ) уменьшается. Этот способ обеспечивает плавное регулирование частоты вращения в широком диапазоне (только в сторону уменьшения частоты от номинальной), однако он неэкономичен из-за значительных потерь электроэнергии в регулировочном реостате (I2a *rД), которые интенсивно растут с увеличением мощности двигателя.

Рис. 29.4. Механические характеристики двигателя параллельного возбуждения:
а — при введении в цепь якоря добавочного сопротивления;
б — при изменении основного магнитного потока;
в — при изменении напряжения в цепи якоря
Регулирование частоты вращения ДПТ НВ изменением основного магнитного потока
Этот способ регулирования в двигателе независимого возбуждения реализуется посредством реостата rрег в цепи обмотки возбуждения. Так, при уменьшении сопротивления реостата возрастает магнитный поток обмотки возбуждения, что сопровождается понижением частоты вращения [см. (29.5)]. При увеличении rрег частота вращения растет. Зависимость частоты вращения от тока возбуждения выражается регулировочной характеристикой двигателя n=f(IВ) при ![]() и
и ![]() .
.
Из выражения (29.5) следует, что с уменьшением магнитного потока Ф частота вращения n увеличивается по гиперболическому закону (рис. 29.5,а). Но одновременно уменьшение Ф ведет к росту тока якоря Ia = M/(Cм*Ф). При потоке ![]() ток якоря достигает значения
ток якоря достигает значения ![]() , т. е. падение напряжения в цепи якоря достигает значения, равного половине напряжения, подведенного к якорю
, т. е. падение напряжения в цепи якоря достигает значения, равного половине напряжения, подведенного к якорю ![]() . В этих условиях частота вращения двигателя достигает максимума nmax. При дальнейшем уменьшении потока
. В этих условиях частота вращения двигателя достигает максимума nmax. При дальнейшем уменьшении потока ![]() частота вращения двигателя начинает убывать, так как из-за интенсивного роста тока Ia второе слагаемое выражения (29.9) нарастает быстрее первого.
частота вращения двигателя начинает убывать, так как из-за интенсивного роста тока Ia второе слагаемое выражения (29.9) нарастает быстрее первого.
При небольшом нагрузочном моменте на валу двигателя максимальная частота вращения nmax во много раз превосходит номинальную частоту вращения двигателя nном и является недопустимой по условиям механической прочности двигателя, т. е. может привести к его «разносу». Учитывая это, при выборе реостата rрег необходимо следить за тем, чтобы при полностью введенном его сопротивлении частота вращения двигателя не превысила допустимого значения.
Например, для двигателей серии 2П допускается превышение частоты вращения над номинальной не более чем в 2—3 раза. Необходимо также следить за надежностью электрических соединений в цепи обмотки возбуждения двигателя, так как при разрыве этой цепи магнитный поток уменьшается до значения потока остаточного магнетизма Фост, при котором частота вращения может достигнуть опасного значения.
Вид регулировочных характеристик n = f(Ф) зависит от значения нагрузочного момента M2 на валу двигателя: с ростом M2 максимальная частота вращения nmax уменьшается (рис. 29.5, б).
Рис. 29.5. Регулировочные характеристики двигателя независимого возбуждения
Недостаток рассмотренного способа регулирования частоты вращения состоит в том, что при изменении магнитного потока Ф меняется угол наклона механической характеристики двигателя.
Рассмотренный способ регулирования частоты вращения прост и экономичен, так как в двигателях независимого возбуждения ток IВ = (0,01 — 0,07)Iа, а поэтому потери в регулировочном реостате ![]() невелики.
невелики.
Однако диапазон регулирования обычно составляет nMAX/nMIN = 2 — 5. Объясняется это тем, что нижний предел частоты вращения обусловлен насыщением машины, ограничивающим значение магнитного потока Ф, а верхний предел частоты опасностью «разноса» двигателя и усилением влияния реакции якоря, искажающее действие которого при ослаблении основною магнитного потока Ф усиливается и ведет к искрению на коллекторе или же к появлению кругового огня.
Регулирование частоты вращения ДПТ НВ изменение напряжения в цепи якоря
Регулирование частоты вращения двигателя изменением питающего напряжения применяется лишь при IB = const, т. е. при раздельном питании цепей обмотки якоря и обмотки возбуждения при независимом возбуждении.
Частота вращения в режиме х.х. n0 пропорциональна напряжению, а ![]() от напряжения не зависит, поэтому механические характеристики двигателя при изменении напряжения не меняют угла наклона к оси абсцисс, а смещаются по высоте, оставаясь параллельными друг другу (см. рис. 29.4, в). Для осуществления этого способа регулирования необходимо цепь якоря двигателя подключить к источнику питания с регулируемым напряжением. Для управления двигателями малой и средней мощности в качестве такого источника можно применить регулируемый выпрямитель, в котором напряжение постоянного тока меняется регулировочным автотрансформатором (АТ), включенным на входе выпрямителя (рис. 29.6,а).
от напряжения не зависит, поэтому механические характеристики двигателя при изменении напряжения не меняют угла наклона к оси абсцисс, а смещаются по высоте, оставаясь параллельными друг другу (см. рис. 29.4, в). Для осуществления этого способа регулирования необходимо цепь якоря двигателя подключить к источнику питания с регулируемым напряжением. Для управления двигателями малой и средней мощности в качестве такого источника можно применить регулируемый выпрямитель, в котором напряжение постоянного тока меняется регулировочным автотрансформатором (АТ), включенным на входе выпрямителя (рис. 29.6,а).
Для управления двигателями большой мощности целесообразно применять генератор постоянного тока независимого возбуждения; привод осуществляется посредством приводного двигателя (ПД), в качестве которого обычно используют трехфазный двигатель переменного тока. Для питания постоянным током цепей возбуждения генератора Г и двигателя Д используется возбудитель В — генератор постоянного тока, напряжение на выходе которого поддерживается неизменным. Описанная схема управления двигателем постоянного тока (рис. 29.6, б) известна под названием системы «генератор — двигатель» (Г—Д).

Рис. 29.6. Схемы включения двигателей постоянного тока при регулировании частоты вращения изменением напряжения в цепи якоря
Изменение напряжения в цепи якоря позволяет регулировать частоту вращения двигателя вниз от номинальной, так как напряжение свыше номинального недопустимо. При необходимости регулировать частоту вращения вверх от номинальной можно воспользоваться изменением тока возбуждения двигателя.
Изменение направления вращения (реверс) двигателя, работающего по системе Г—Д, осуществляется изменением направления тока в цепи возбуждения генератора Г переключателем П, т. е. переменой полярности напряжения на его зажимах. Если двигатель постоянного тока работает в условиях резко переменной нагрузки, то для смягчения колебаний мощности, потребляемой ПД из трехфазной сети, на вал ПД помещают маховик М, который запасает энергию в период уменьшения нагрузки на двигатель Д и отдает ее в период интенсивной нагрузки двигателя.
Регулирование частоты вращения изменением напряжения в цепи якоря обеспечивает плавное экономичное регулирование в широком диапазоне nMAX/nMIN ≥ 25 . Наибольшая частота вращения здесь ограничивается условиями коммутации, а наименьшая — условиями охлаждения двигателя.
Еще одним достоинством рассматриваемого способа регулирования является то, что он допускает безреостатный пуск двигателя при пониженном напряжении.
Импульсное регулирование частоты вращения ДПТ НВ
Сущность этого способа регулирования иллюстрируется схемой, изображенной на рис. 29.7, а. Цепь обмотки якоря двигателя параллельного (независимого) возбуждения периодически прерывается ключом К. Во время замыкания цепи якоря на время t к обмотке якоря подводится напряжение U = Uимпи ток в ней достигает значения Iamax. Затем ключом К цепь якоря размыкают и ток в ней убывает, достигая к моменту следующего замыкания цепи значения Iamin (при размыкании ключа К ток в обмотке якоря замыкается через диод VD). При следующем замыкании ключа К ток достигает значения Iamax и т. д. Таким образом, к обмотке якоря подводится некоторое среднее напряжение
![]() , (29.13)
, (29.13)
где Т— отрезок времени между двумя следующими друг за другом импульсами напряжения (рис. 29.7, б); ![]() — коэффициент управления.
— коэффициент управления.
При этом в обмотке якоря проходит ток, среднее значение которого ![]() .
.
При импульсном регулировании частота вращения двигателя
![clip_image002[43]](https://electrikam.com/wp-content/uploads/2014/10/clip_image00243_thumb.gif "clip_image002[43]") . (29.14)
. (29.14)
Таким образом, импульсное регулирование частоты вращения аналогично регулированию изменением подводимого к цепи якоря напряжения. С целью уменьшения пульсаций тока в цепи якоря включена катушка индуктивности (дроссель) ![]() , а частота подачи импульсов равна 200—400 Гц.
, а частота подачи импульсов равна 200—400 Гц.
На рис. 29.7, в представлена одна из возможных схем импульсного регулирования, где в качестве ключа применен управляемый диод — тиристор VS. Открывается тиристор подачей кратковременного импульса от генератора импульсов (ГИ) на управляющий электрод (УЭ) тиристора. Цепь L1C, шунтирующая тиристор, служит для запирания последнего в период между двумя управляющими импульсами. Происходит это следующим образом: при открывании тиристора конденсатор С перезаряжается через контур L1C и создает на силовых электродах тиристора напряжение, обратное напряжению сети, которое прекращает протекание тока через тиристор. Параметрами цепи L1C определяется время (с) открытого состояния тиристора: ![]() . Здесь L1 выражается в генри (Гн); С — в фарадах (Ф).
. Здесь L1 выражается в генри (Гн); С — в фарадах (Ф).
Рис. 29.7. Импульсное регулирование частоты вращения двигателя постоянного тока
Значение среднего напряжения Uср регулируется изменением частоты следования управляющих импульсов от генератора импульсов на тиристор VS.
Жесткие механические характеристики и возможность плавного регулирования частоты вращения в широком диапазоне определили области применения двигателей независимого возбуждения в станочных приводах, вентиляторах, а также во многих других случаях регулируемого электропривода, где требуется устойчивая работа при колебаниях нагрузки.
-
Регулирование частоты вращения дпт
Возможные
способы регулирования частоты вращения
двигателя постоянного тока вытекают
из выражения для скоростной характеристики
n
=
R
=
Rq
+ Rр + Rne
Таким
образом, возможны следующие способы,
регулирования частоты вращения двигателя
постоянного тока -1)
изменением падения напряжения в цепи
якоря двигателя;
-2)
изменением магнитного потока
машины(производится с помощью
регулировочного реостата в цепи
возбуждения Rpe);
-3)
изменением подводимого к двигателю
напряжения.
-
Регулирование частоты вращения двигателя постоянного тока изменением падения напряжения в цепи якоря.
Данный
способ предполагает включение в цепь
якоря регулировочного реостата.
Регулировочный реостат имеет несколько
ступеней. Величина сопротивления
реостата определяет новую частоту
вращения двигателя.

Регулировочный
реостат рассчитывается на длительный
режим работы.
В
реостате имеют место большие потери
мощности, поэтому данный способ применяют
в двигателях небольшой мощности.
ДОСТОИНСТВА:
Простота регулирования
НЕДОСТАТКИ:
Данный
способ не является экономичным.
-
Регулирование частоты вращения двигателя постоянного тока изменением значения магнитного потока
Обмотка
возбуждения двигателя рассчитывается
таким образом, чтобы в номинальном
режиме магнитный поток был максимален.
Для
изменения магнитного потока в цепь
обмотки возбуждения включается
регулировочное сопротивление с помощью
которого уменьшают ток возбуждения, а
следовательно, и магнитный поток в
двигателе.
Уменьшение
магнитного потока приводит к возрастанию
частоты вращения двигателя.
п
<
2,0;
max
пН
ДОСТОИНСТВА:
В
цепи возбуждения протекает небольшой
ток, поэтому в регулировочном реостате
потери мощности небольшие, данный способ
является экономичным;
НЕДОСТАТКИ:
Данным
способом можно только увеличивать пн
-
Регулирование частоты вращения двигателя постоянного тока изменением подводимого напряжения
Это
лучший способ регулирования, он позволяет
плавно и в широких пределах изменять
частоту вращения двигателя
Недостатки:
требуется — либо отдельный генератор,
-либо
преобразователь напряжения
Это
увеличивает массогабаритные показатели
и стоимость всей установки
-
Реверс (изменение направления вращения) дпт
Изменение
направления вращения двигателя (реверс)
постоянного тока достигается
-
либо
изменением направления тока в обмотке
якоря , -
либо
изменением направления тока в обмотке
возбуждения.
При
одновременном изменении направлении
токов в обмотках двигателя реверса не
произойдёт.
Пользуясь
правилом левой руки определяем направление
силы, действующей на проводники и
направление вращающего момента.
ПОЛУПРОВОДНИКОВЫЕ
Приборы
(ПП)
-
Основные сведения о полупроводниковых приборах
Электроника
—
наука, которая изучает:
-
физические
явления в полупроводниковых и
электровакуумных приборах, -
характеристики
этих приборов, -
системы
и устройства, основанные на их
использовании.
В
зависимости от среды, в которой протекает
электрический ток, электронные приборы
подразделяют на 3 основных класса:
-
Электронные
(вакуумные) лампы. В них поток электронов
проходит в вакууме. -
Ионные
(газоразрядные) лампы. В них основными
носителями тока являются ионы (как
положительные, так и отрицательные),
полученные при ионизации газа,
заполняющего прибор. -
Полупроводниковые
приборы. В них ток создается движением
двух видов носителей — электронами и
дырками в твердом теле полупроводника.
В
последние годы получила применение
электронная аппаратура, основанная на
использовании полупроводниковых
приборов, которые по сравнению с
вакуумными и газоразрядными имеют
следующие преимущества:
-
Высокая
надежность работы. -
Компактность.
-
Высокий
к.п.д.
Полупроводниковые
приборы находят широкое применение на
железнодорожном транспорте и в
современном электрооборудовании и
электроприводе, используемом при
выполнении строительных работ и работ
по управлению движением.
По
удельному электрическому сопротивлению
вещества подразделяются на три типа.
|
Проводники (металлы) |
Полупроводники |
Диэлектрики |
|
1Q-8 |
1Q-5 |
1Q9 |
К
полупроводникам относятся:
—
химические элементы четвертого столбца
таблицы Менделеева (Ge, Si);
-химические
соединения, например GaAs.
Полупроводники
представляют собой кристаллы с регулярной
структурой.
Электроны,
расположенные на внешнем слое атома
называются валентными.
Каждый
из валентных электронов вступает в
связь с таким же электроном, но соседнего
атома.
Такая
связь называется ковалентной.
По
мере нагрева, эта связь нарушается, в
результате образуются свободные
электроны
и
пустые места, называемые «ДЫРКИ».
Этот
процесс называется генерацией
носителей заряда.
Полупроводниковые
приборы делятся на 4 группы:
-
Резисторы.
-
Диоды.
-
Триоды
(транзисторы). -
Тиристоры.
Они
характеризуются различной полупроводниковой
структурой и наличием определенного
количества электродов
-
Резисторы
выполняются из однородного
полупроводникового материала (чаще
Si), имеют два электрода. -
Диоды
состоят из двух слоев полупроводников,
обладающих различным типом
электропроводности; имеют два электрода. -
Транзисторы
имеют трехслойную полупроводниковую
структуру, имеют три электрода. -
Тиристоры
имеют четырехслойную полупроводниковую
структуру, имеют три электрода.
Соседние файлы в папке Лекции
- #
- #
- #
- #
- #
- #
- #
- #
>С увеличением нагрузки на валу двигателя увеличивается так же и ток в якоре. Это вызывает увеличение падения напряжения» сопротивлении обмотки якоря и щеточных контактах.
Так как ток возбуждения остается неизменным (машина нерегулируема), то магнитный поток также постоянен. Однако при увеличении тока в якоре увеличивается размагничивающее действие потока реакции якоря и магнитный поток Ф несколько уменьшится. Увеличение Iяrя вызывает уменьшение скорости двигателя, а уменьшение Ф увеличивает скорость. Обычно падение напряжения влияет на изменение скорости в несколько большей степени, чем реакция якоря, так что с увеличением тока в якоре скорость уменьшается. Изменение скорости у двигателя этого типа незначительно и не превышает 5% при изменении нагрузки от нуля до номинальной, т. е. двигатели параллельного возбуждения имеют жесткую скоростную характеристику.
![]()
При неизменном магнитном потоке зависимость момента от тока в якоре представится прямой линией. Но под воздействием
Вращающий момент двигателя реакции якоря с увеличением нагрузки происходит некоторое уменьшение магнитного потока и зависимость момента пойдет несколько ниже прямой линии.
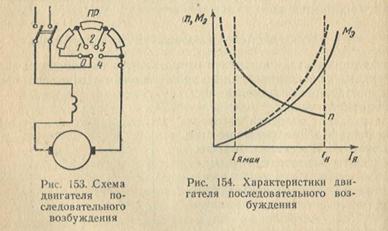
Схема двигателя последовательного возбуждения показана на рис. 153. Пусковой реостат этого двигателя имеет только два зажима, так как обмотка возбуждения и якорь образуют одну последовательную цепь. Характеристики двигателя изображены на рис. 154. Число оборотов двигателя последовательного возбуждения определяется следующим выражением:
![]()
где rс— сопротивление последовательной обмотки возбуждения. В двигателе последовательного возбуждения магнитный поток не остается постоянным, а резко изменяется с изменением нагрузки, что вызывает значительное изменение скорости. Так как падеже напряжения в сопротивлении якоря и в обмотке возбуждения очень мало в сравнении с приложенным напряжением, то число оборотов можно приближенно определить следующим выражением:
![]()
Если пренебречь насыщением стали, то можно считать магнитный поток пропорциональным току в обмотке возбуждения, который равен току в якоре. Следовательно, у двигателя последовательного возбуждения скорость вращения обратно пропорциональна току в якоре и число оборотов резко уменьшается с увеличением нагрузки, т. е. двигатель имеет мягкую скоростную характеристику. С уменьшением нагрузки скорость вращения двигателя увеличивается. При холостом ходе (Iя=0) скорость двигателя беспредельно возрастает, т. е. двигатель идет в разнос.
Таким образом, характерным свойством двигателей последовательного возбуждения является недопустимость сброса нагрузки, т. е. работы вхолостую или при малых нагрузках. Двигатель имеет минимальную допустимую нагрузку, составляющую 25—30% номинальной. При нагрузке меньше минимально допустимой скорость двигателя резко увеличивается, что может вызвать его разрушение. Поэтому, когда возможны сбросы или резкие уменьшения нагрузки, использование двигателей последовательного возбуждения является недопустимым.
В двигателях очень малых мощностей сброс нагрузки не вызывает разноса, так как механические потери двигателя будут достаточно большой нагрузкой для него.
Вращающий момент двигателя последовательного возбуждения, учитывая пропорциональную зависимость между магнитным потоком и током в якоре (Ф = С’Iя), можно определить следующим выражением:
![]()
где K’=KC’
т. е. вращающий момент пропорционален квадрату тока. Однако при больших токах сказывается насыщение стали и зависимость момента приближается к прямой линии. Таким образом двигатели этого типа развивают большие вращающие моменты при малых оборотах, что имеет существенное значение при пуске больших инерционных масс и перегрузках. Эти двигатели широко используют в транспортных и подъемных устройствах.
При смешанном возбуждении возможно как согласное, так и встречное включение обмоток возбуждения.
Двигатели со встречным включением обмоток не нашли широкого применения, так как они обладают плохими пусковыми свойствами и работают неустойчиво.
Скоростные характеристики двигателей смешанного возбуждения занимают промежуточное положение между характеристиками двигателей параллельного и последовательного возбуждения.
С увеличением тока в якоре число оборотов якоря уменьшается в большей мере, чем для двигателей параллельного возбуждения, за счет увеличения магнитного потока, вызываемого увеличением тока в последовательной обмотке возбуждения. При холостом ходе двигатель смешанного возбуждения не идет вразнос, так как магнитный поток не уменьшается до нуля из-за наличия параллельной обмотки возбуждения.
При увеличении нагрузки в двигателях смешанного возбуждения увеличивается магнитный поток и вращающий момент возрастает в большей мере, чем в двигателях параллельного возбуждения, но в меньшей мере, чем в двигателях последовательного возбуждения.
![]()
§ 116 РЕГУЛИРОВАНИЕ СКОРОСТИ ВРАЩЕНИЯ ДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА
Двигатели постоянного тока дают возможность плавно и экономично регулировать скорость вращения в широких пределах. В результате этого весьма ценного свойства двигатели постоянного тока получили широкое распространение и часто являются незаменимыми.
Число оборотов якоря двигателя при любой схеме возбуждения определяется следующим выражением:
![]()
где rс — сопротивление последовательной обмотки возбуждения (для двигателя параллельного возбуждения rс=0). Это выражение показывает, что изменение скорости вращения двигателя можно осуществить изменением напряжения сети, сопротивления цепи якоря и магнитного потока.
Регулирование скорости вращения изменением напряжения сети осуществляется в случае, когда источником электрической энергий двигателя является какой-либо генератор.
Для регулирования скорости вращения двигателя изменением сопротивления цепи якоря используется регулировочный реостат, включенный последовательно с якорем. В отличие от пускового регулировочный реостат должен быть рассчитан на длительное прохождение тока. В сопротивлении регулировочного реостата происходит большая потеря энергии, вследствие чего резко уменьшается
п. д. двигателя.
Регулирование скорости вращения якоря двигателя изменением магнитного потока производится изменением тока в обмотке возбуждения. В двигателях параллельного и смешанного возбуждения включается регулировочный реостат. В двигателях последовательного возбуждения изменение тока в обмотке возбуждения достигается шунтированием этой обмотки каким-либо регулируемым сопротивлением. Этот способ регулирования скорости не создает дополнительных потерь и экономичен.
![]()
§ 117. ПОТЕРИ И К. П. Д. МАШИН ПОСТОЯННОГО ТОКА
В машинах постоянного тока при работе происходит потеря энергии, которая складывается из следующих потерь:
1. Потери в стали Рст на гистерезис и вихревые токи, возникающие в сердечнике якоря. При вращении якоря машины сталь его сердечника непрерывно перемагничивается. На перемагничивание стали затрачивается мощность, называемая потерями на гистерезис. Одновременно, при вращении якоря в магнитном поле в сердечнике его индуктируются вихревые токи. Потери на гистерезис и вихревые токи, называемые потерями в стали, обращаются в тепло и нагревают сердечник якоря.
Потери в стали зависят от магнитной индукции и частоты перемагничивания сердечника якоря.
Магнитная индукция зависит от э. д. с. машины или, иначе, от напряжения, а частота перемагничивания — от скорости вращения якоря. Поэтому при работе машины постоянного тока в режиме генератора или двигателя потери в стали будут постоянными, не зависящими от нагрузки, если напряжение на зажимах якоря и скорость его вращения постоянны.
2. Потери энергии на нагревание проводов обмоток возбуждения и якоря протекающими по ним токами, называемые потерями в меди,— Роб.
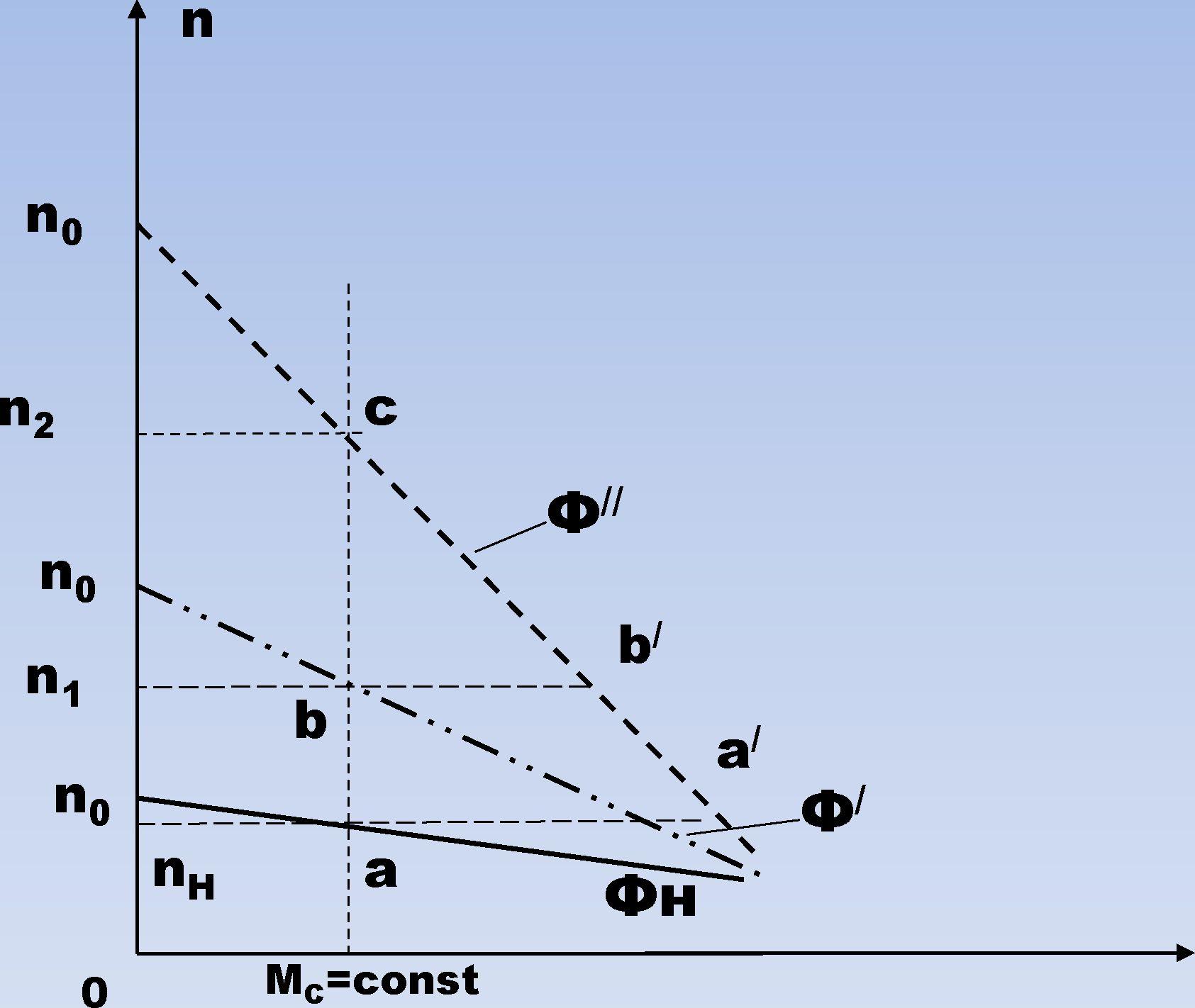
Регулирование частоты вращения. Частоту вращения электродвигателей постоянного тока регулируют: введением резисторов в цепь якоря двигателя; изменением магнитного потока; изменением напряжения, приложенного к якорю электродвигателя.
В зависимости от способа регулирования частоты вращения получаются различные искусственные механические характеристики.
При введении резисторов в цепь якоря у двигателей с независимым и параллельным возбуждением магнитный поток не изменяется, следовательно, остается постоянной частота вращения идеального холостого хода nx, но значение сопротивления вводимого резистора оказывает большое влияние на наклон механической характеристики, так как возрастает угловой коэффициент:
Поэтому искусственная механическая характеристика двигателей с независимым и параллельным возбуждением представляет собой прямую линию 1 (рис. 2.3), проходящую через одну точку nx с естественной характеристикой 0 и наклоном β1, определяемым значением сопротивления вводимого резистора.

Рис. 2.3. Механические характеристики электродвигателя с параллельным возбуждением
Изменение сопротивления цепи якоря для двигателя с последовательным возбуждением приведет к смещению характеристики вниз в сторону уменьшения n.
Магнитный поток электродвигателей можно изменить введением дополнительного резистора в цепь обмотки возбуждения, причем уменьшаются ток возбуждения и магнитный поток двигателя.
Изменение магнитного потока приводит к увеличению частоты вращения идеального холостого хода и изменению наклона механической характеристики у двигателей с независимым, параллельным и смешанным возбуждением.
Действительно, если Ф = Ф0, то для естественной характеристики
Таким образом, искусственная механическая характеристика, полученная при введении резистора в цепь обмотки возбуждения двигателя, располагается выше естественной (характеристика 2), частота вращения идеального холостого хода и наклон характеристики увеличиваются.
Изменение питающего цепь якоря напряжения при неизменном напряжении в цепи независимой обмотки возбуждения приводит у двигателей с независимым возбуждением к изменению частоты вращения идеального холостого хода при неизменном наклоне характеристики.

Следовательно, искусственная характеристика расположится ниже естественной и будет параллельна ей (характеристика 3). У двигателя, имеющего смешанное возбуждение, искусственная характеристика также будет ниже естественной.
Анализируя полученные механические характеристики электродвигателей постоянного тока, можно установить, что при одном и том же моменте на валу электродвигателя частота вращения его на разных характеристиках будет различной. Поэтому частоту вращения электродвигателей регулируют способами, используемыми для получения искусственных характеристик. Различают параметрическое и импульсное регулирование.
При параметрическом способе изменяется какой-либо параметр, который далее остается неизменным. Импульсное регулирование характеризуется периодическим ступенчатым изменением какого-либо параметра с определенной частотой.
Каждому из параметрических способов присущи свои особенности, определившие область их применения.
Введение резистора в цепь якоря приводит к уменьшению частоты вращения, причем эффективность регулирования тем больше, чем больше нагружен двигатель. Способ не экономичен из-за больших потерь энергии в дополнительном резисторе, но все же используется вследствие его простоты.
Введение резистора в цепь обмотки возбуждения приводит к увеличению частоты вращения. Этот способ экономичен, так как ток возбуждения составляет 2—5 % тока якоря и потери в резисторе невелики. Однако этот способ не позволяет получить частоту вращения двигателя меньше номинальной.
Изменение приложенного к якорю напряжения — наиболее удачный способ регулирования. Он экономичен и допускает регулирование частоты вращения в достаточно широких пределах при любых значениях нагрузки, но требует автономных источников питания с широким диапазоном изменения напряжения. Поэтому его целесообразно применять для электроприводов с частыми пусками и большим диапазоном регулирования частоты вращения электродвигателя (рулевые электроприводы, электроприводы оперативных лебедок земснарядов, гребные электрические установки и т.п.). Автономным источником питания может служить генератор постоянного тока с независимым возбуждением. Напряжение можно регулировать с помощью управляемого выпрямителя или магнитного усилителя.
Из импульсных способов регулирования двигателей постоянного тока наиболее широкое распространение получил способ изменения времени включения приложенного к якорю напряжения при постоянной частоте включения. Этот способ называется широтно-импульсным. Среднее значение приложенного к якорю напряжения

Изменяя tp при постоянном Т (изменяя скважность), регулируют среднее значение приложенного к якорю двигателя напряжения и частоту вращения электродвигателя. Частоту включения обычно выбирают в пределах 500—1000 Гц. Возможен другой способ импульсного регулирования, когда время включения tр остается постоянным, а период Т изменяется. Такой способ принято называть частотно-импульсным.
Импульсное регулирование электродвигателей постоянного тока является перспективным для тех электроприводов, для которых применяется регулирование изменением приложенного к якорю напряжения. Основным недостатком этого способа является большое число включений, приводящих к появлению больших переходных токов и требующих специальной аппаратуры.
Пуск электродвигателей постоянного тока. Как известно из курса электротехники, вращающий момент электродвигателя при пуске

Пусковой ток может значительно превышать номинальный ток двигателя из-за отсутствия противо-э. д. с. в момент пуска.
При пуске все дополнительные резисторы в цепях независимой и параллельной обмоток возбуждения должны быть введены и последовательная обмотка не шунтирована.
Отечественная промышленность изготовляет электродвигатели, пусковой ток которых по условиям коммутации должен удовлетворять неравенству Iя.п≤2,5Iя.ном.
При этом наибольший пусковой момент двигателей с независимым и параллельным возбуждением при Ф = const будет также Мп≤2,5Мном.
При таком же пусковом токе у двигателей со смешанным и последовательным возбуждением пусковой момент будет несколько больше вследствие увеличения магнитного потока, создаваемого последователь ной обмоткой, по сравнению с номинальным.
По мере увеличения частоты вращения двигателя растет противо- э.д.с., что приводит к уменьшению тока якоря
следовательно, будет уменьшаться вращающий момент двигателя.
Для обеспечения наиболее быстрого разгона двигателя необходимо поддерживать при пуске момент и ток якоря в определенных пределах.
Различают следующие способы пуска электродвигателей постоянного тока: прямой, с ограничением пусковых токов вследствие изменения сопротивления цепи якоря и импульсный.
Прямой пуск осуществляется непосредственно включением двигателя на полное напряжение сети при отсутствии добавочных элементов в цепях якоря и возбуждения. Преимуществами этого способа являются его простота и отсутствие дополнительной пусковой аппаратуры, недостатком — большой ток в цепи якоря в первоначальный момент пуска, что вызывает искрение на коллекторе, возникновение значительного момента на валу двигателя и колебания напряжения в судовой сети. Прямой пуск применяют для двигателей постоянного тока мощностью не более 1,5 кВт.
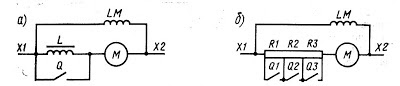
Рис. 2.4. Пуск двигателя постоянного тока
Параметрический пуск основан на предварительном изменении какого-либо параметра двигателя, ограничивающего пусковой ток, с последующим его приведением в процессе пуска к значению соответствующему номинальному режиму.
Для двигателей небольшой мощности применяют пуск с помощью реактора L, включенного последовательно в цепь якоря двигателя (рис. 2.4, а). При правильно подобранной индуктивности реактора время нарастания тока, определяемое электромагнитной постоянной времени электрической цепи,
T = (Lя+L)/Rя
соизмеримо с временем разгона электродвигателя, что значительно снижает пик пускового тока. Недостатками этого способа являются большие габаритные размеры и масса пускового реактора.
Наибольшее применение получил реостатный способ пуска, при этом способе в цепь якоря для ограничения пусковых токов включают дополнительный реостат (рис. 2.4, б), состоящий из трех-четырех резисторов. По мере разгона электродвигателя секции реостата поочередно закорачивают.
В некоторых случаях пользуются способом пуска, основанным на ступенчатом или плавном изменении напряжения, приложенного к якорю двигателя, от нуля до номинального значения. Этот способ возможен при питании якоря электродвигателя от отдельного источника с регулируемым напряжением. В качестве такого источника могут быть использованы генератор постоянного тока с независимым возбуждением, регулируемый трансформатор с выпрямителем, трансформатор с управляемым выпрямителем.
При импульсном пуске, так же как и при импульсном регулировании частоты вращения, может быть использован как широтно-импульсный, так и частотно-импульсный способ. В том и другом случае пуск осуществляется изменением скважности от нуля до номинального значения.
Реверсирование электродвигателей постоянного тока. Реверсирование— изменение направления вращения на противоположное. Для реверсирования необходимо изменить направление вращающего момента М = СмФIя, что возможно осуществить изменением направления тока в якоре электродвигателя или изменением направления магнитного потока путем изменения направления тока в обмотках возбуждения.
Для двигателей с независимым и параллельным возбуждением предпочтительнее первый способ по сравнению со вторым по сле-дующим причинам:
во-первых, при размыкании обмотки возбуждения, предшествующем ее переключению, возникает значительная э. д. с. самоиндукции
затрудняющая процесс коммутации и увеличивающая вероятность пробоя изоляции;
во-вторых, при реверсировании двигатель сначала необходимо остановить, а затем он начинает вращаться в обратную сторону. Но уменьшение магнитного потока вызовет не уменьшение, а увеличение частоты вращения.
Для двигателей со смешанным возбуждением реверсирование изменением направления магнитного потока еще более затруднено по сравнению с двигателем с параллельным возбуждением, так как у него необходимо переключать две обмотки возбуждения. Для двигателей с последовательным возбуждением оба способа равноценны.
Торможение электродвигателей постоянного тока. При режиме торможения электромагнитный момент на валу электродвигателя направлен в сторону, противоположную направлению вращения.
Режимы торможения используются, когда необходимо: остановить электропривод, вращающийся по инерции; остановить электропривод, вращающийся под действием момента, создаваемого рабочей машиной, например: под действием опускаемого подъемным краном груза; замедлить вращение электропривода при воздействии момента, создаваемого рабочей машиной.
Чтобы осуществить режим торможения электродвигателя, нужно изменить направление вращающего момента на его валу, при этом двигатель переходит в генераторный режим работы. В зависимости от использования энергии различают три вида торможения: рекуперативное, динамическое и противовключением. Рекуперативное торможение сопровождается возвратом энергии в питающую сеть. При динамическом торможении и торможении противовключением энергия превращается в тепловую в элементах цепи якоря двигателя.
Торможение с отдачей энергии в сеть, или рекуперативное торможение, наступает, тогда, когда электродвигатель под действием момента рабочей машины (идущий под уклон железнодорожный состав, опускающийся на подъемном кране груз) разгоняется до частоты вращения, превышающей частоту вращения идеального холостого хода. В этом случае э.д.с. якоря будет больше напряжения в сети, ток изменит свое направление и машина будет работать в режиме генератора, отдавая энергию в сеть. При этом направление вращения двигателя не изменится. Механическая характеристика двигателя с параллельным возбуждением О (рис. 2.5) при торможении с отдачей энергии в сеть будет являться продолжением характеристики

Рис. 2.5. Механические характеристики двигателя постоянного тока при рекуперативном торможении
в область отрицательных моментов. Область режима торможения обозначена цифрой II, область двигательного режима — цифрой I.
У двигателей со смешанным возбуждением при переходе в режим торможения ток в последовательной обмотке меняет свое направление, и поэтому она противодействует параллельной обмотке, размагничивая машину и уменьшая момент торможения (штриховая линия). Во избежание этого последовательную обмотку закорачивают или отключают (характеристика I).
Двигатели с последовательным возбуждением не могут работать в режиме торможения с отдачей энергии в сеть, так как с увеличением частоты вращения ток двигателя уменьшается и он размагничивается. Его э.д.с. никогда не может быть больше напряжения в сети.
Динамическое торможение осуществляют отключением якоря от сети и замыканием его на резистор. Различают два вида динамического торможения: с независимым возбуждением и с самовозбуждением.

Рис. 2.6. Схемы включения и механические характеристики двигателей при динамическом торможении
При торможении двигателей с независимым и параллельным возбуждением применяют торможение с независимым возбуждением (рис. 2.6, а).
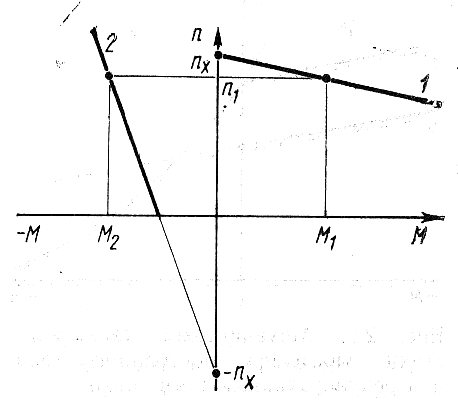
Рис. 2.7. Механическая характеристика двигателя постоянного тока с параллельным возбуждением при торможении противовключением
В этом случае якорь Двигателя отключается от питающей сети и включается на тормозной резистор R1, обмотка возбуждения остается включенной в сеть.
У двигателя со смешанным возбуждением последовательная обмотка отключается или закорачивается.
Торможение двигателя с последовательным возбуждением при питании обмотки возбуждения от сети (рис. 2.6, б) более эффективно, чем торможение с самовозбуждением (рис. 2.6, в), однако для ограничения тока в обмотке необходимо ее подключать через дополнительный резистор R2, мощность рассеяния которого должна равняться мощности электродвигателя
Уравнение механической характеристики при динамическом торможении (при U = 0)
При Ф = const (независимое возбуждение) оно представляет собой уравнение прямой линии.
При самовозбуждении в связи с изменением магнитного потока характеристика искривляется, а при некотором значении частоты вращения самовозбуждение и торможение двигателя прекращаются.
На рис. 2.6, г показаны механические характеристики для динамического торможения: 0 — для торможения с независимым возбуждением; 1 — для торможения с самовозбуждением. Штриховой линией показан участок, на котором торможение прекращается.
Торможение противовключением производится быстрым реверсированием двигателя по ходу, когда якорь по инерции продолжает вращаться в одном направлении, а обмотки включаются на противоположное. При этих режимах знаки пх и п противоположны, э. д. с. якоря двигателя совпадает по направлению с напряжением и ток якоря
так как в начале торможения Е ≈ U, сопротивление резистора R1 необходимое для ограничения тока до допустимых пределов, должно быть примерно в 2 раза больше пускового сопротивления двигателя. Механическая характеристика при этом способе торможения двигателя с параллельным возбуждением приведена на рис. 2.7 (характеристика 2).
Если двигатель предварительно работал с М1>0 и n1>0 на характеристике 1, то при торможении противовключением уравнение механической характеристики будет

При быстром реверсировании частота вращения двигателя не успеет измениться и режим торможения будет соответствовать точке с моментом М2 и частотой вращения n1 на характеристике 2.
Из рис. 2.7 видно, что при торможении противовключением в момент остановки двигателя (n = 0) момент на его валу не обращается в нуль. Поэтому после остановки двигатель может начать вращаться в обратную сторону. Во избежание этого двигатель после остановки должен быть отключен от сети.
С точки зрения регулирования скоростью вращения электродвигателей, интересно уравнение для электромеханических характеристик, соответствующее Второму закону Кирхгофа:
ω = U/C×Φ – ΥЯ /( C×Φ)3×M
При описании технических характеристик электродвигателя скорость, выражаемая оборотами в минуту, зачастую называется частотой вращения ν по известному соотношению:
ω = 2p/T = 2pn
Поэтому эти две разноименные величины часто применяются в одном и том же смысле. Скорость w (частота ν) находится в прямой зависимости от напряжения питания U и в обратной от магнитного потока Ф. Исходя из приведенной выше формулы, возникает вывод, что скоростью можно управлять, регулируя сопротивление якоря, магнитный поток и напряжение питания.

Методы регулировки
Итак, различают три основных варианта регулирования скоростью:
- Изменением напряжения сети. Меняя подводимое питание можно управлять частотой вращения двигателя;
- Добавлением пускового реостата в цепь якоря. Регулируя сопротивление, можно уменьшить скорость вращения;
- Управлением магнитного потока. Двигатели с электромагнитами дают возможность регулировать поток путем изменения тока возбуждения. Однако нижний предел ν min ограничен насыщением магнитной цепи двигателя, что не позволяет увеличивать в большой степени магнитный поток.
К каждому из вариантов соответствует определённая зависимость механических характеристик.
Методы регулирования применительны к двигателям с различными:
- типами возбуждения;
- величиной мощности.
На практике в современных электрических моторах, в связи с недостатками и ограниченности диапазонов, рассмотренные методы не всегда применяются.
Это еще связано с тем, что машины отличаются довольно небольшими КПД, и к тому же не позволяют плавно увеличивать или уменьшать частоту вращения.
Электронные же схемы управления с регуляторами частоты, работающими от аккумуляторной батареи на 12 В, напротив, широко используются. Например, они очень актуальны для управления низковольтными электродвигателями 12 вольт в приборах автоматики, детских игрушках, электрических велосипедах, аккумуляторных детских автомобилях.

Принципиальной особенностью метода является то, что ток в цепи якоря и момент, развиваемый электродвигателем, зависят лишь от величины нагрузки на его валу. Регулировка осуществляется с помощью регулятора оборотов электродвигателя.
В течение очень долгого времени тиристорные преобразователи являлись единственным коммерчески доступными регуляторами двигателей. К слову сказать, они по-прежнему самые распространенные на сегодняшний день. Однако с появлением силовых транзисторов стали наиболее популярными регуляторы оборотов двигателя постоянного тока с широтно-импульсной модуляцией. Приведём для примера ниже схему, работающую от источника постоянного тока 12 В.
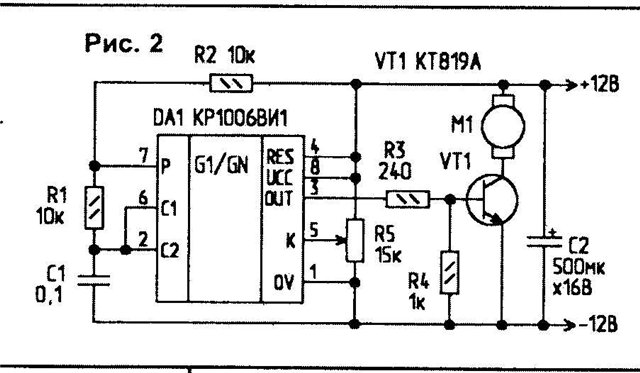
Схема на практике даёт возможность, к примеру, увеличивать либо уменьшать яркость свечения ламп накаливания на 12 вольт.
Последовательно-параллельное управление используется в ситуациях, когда два или более агрегата постоянного тока соединены механически. Схема с последовательным соединением электродвигателей, в которой общее напряжение делится на всех, используется для низкоскоростных приложений. Схема с параллельным соединением машин, имеющих одинаковое напряжение, используется в высокоскоростных применениях.
Заключение
Рассмотренный метод регулировки напряжения сети считается самым эффективным и экономичным вариантом, так как:
- им обеспечивается широкий диапазон изменения скоростей (wmin / wmax) и лучшие энергетические характеристики (КПД);
- он работает без каких-либо потерь мощности в силовой цепи якоря.
Управление осуществляется плавно, и по точности регулировка частоты вращения является весьма высокой.