Влияние напряжения сети на механическую характеристику асинхронной машины

Поскольку в питающих сетях присутствует падения напряжений, которые могут вызываться различными факторами (нехваткой мощности сети, прямой пуск электроприводов большой мощности и так далее), то эти падения имеют негативное влияние на работу асинхронных электроприводов. Рассмотрим почему.
Как известно момент, который будет развивать асинхронный электродвигатель, в не зависимости от скольжения машины, всегда будет пропорционален квадрату напряжения приложенного к его обмоткам:

Где: m1 – количество фаз питающего напряжения, ω – скорость холостого хода измеряемая в радианах в секунду – рад/с.

Подставив в эти выражения значения скольжения, напряжения и тока получим определенное семейство характеристик асинхронного электродвигателя при различных значениях напряжения на зажимах электродвигателя.

Данные характеристики построены не в стандартных осях момента М и скольжения s, а в относительных единицах.
Из приведенных выше характеристик четко видно, что скольжение асинхронной машины не зависит от изменений питающего напряжения. Устойчива работа электропривода возможна со статическим моментом только на участке от синхронной скорости до критического скольжения (sк). Соответственно при снижении напряжения питания эта зона существенно снижается. Также у асинхронного электродвигателя значительно снижается пусковой момент, что делает невозможным его запуск с номинальным моментом при значительном снижении напряжения питающей сети.
Так как снижение напряжения наблюдается не только в бытовых но и в промышленных сетях, необходимо убедится, что значения критического и пускового момента асинхронного электродвигателя будут удовлетворять заданным параметрам рабочего органа даже при минимально возможном напряжении питания данной сети. Это необходимо для безаварийной и надежной работы систем.
Источник
Влияние режима напряжения на работу асинхронных электродвигателей
Анализ зависимостей изменения величины дополнительных потей для различных типов двигателей от напряжения на их зажимах показывает что наиболее существенное влияние имеет значение коэффициента загрузки двигателя.
Установлено, что общим для рассмотренных двигателей является увеличение потребляемой реактивной мощности при увеличении подведенного напряжения.
Кроме того, удельное потребление реактивной мощности растет уменьшением коэффициента загрузки.
Для приближенных расчетов можно принимать, что для наибо распространенных трехфазных двигателей серии 4А мощностью 20 — 100 кВт повышение напряжения на 1% приводит к росту реактивной мощности приблизительно на 3%. Для двигателей меньшей номинальной мощности cоответствующее увеличение потреблямой реактивной мощности достигает 5 — 7%
При изменении напряжения на зажимах двигателя изменяется скольжение, а следовательно, и скорость вращения.
При снижении напряжения скорость вращения двигателей заметно снижается, особенно для двигателей меньшей мощности. Наоборот, повышение напряжения приводит к увеличению скорости двигателелей.
При работе двигателей с малыми коэффициентами загрузки влият изменения напряжения на скорость двигателей практически очень мало.
При оценке влияния изменения напряжения на экономичность работы асинхронных двигателей следует учитывать стоимость дополнтельных потерь электроэнергии, вызванных отклонением напряжения увеличение реактивной мощности, потребляемой двигателем, а также изменение экономических показателей, связанных с влиянием изменения скорости вращения на производительность соответствующих механизмов.
В настоящее время отсутствует единая методика оценки экономичности работы асинхронных двигателей. Некоторые специалисты вообще отрицают целесообразность и возможсть практического выполнения подобных расчетов, мотивируя это что изменение активной и реактивной мощности, потребляемой двигателем при относительно небольших отклонениях от номинального напряжения, мало, а влияние изменений скорости двигателей на (производительность механизмов в этих условиях практически вообще отсутствует и не может быть даже замечено.
В то же время имеются данные о том, что правильная оценка влияния изменений напряжения на экономичность работы асинхронных электродвигателей в ряде случаев позволяет получить существенный эффект.
Если влияние скорости вращения двигателя на производительность механизмов имеет место, то напряжение на зажимах двигателей должно поддерживаться не ниже номинального при малых коэффициентах грузки, и в пределах наибольшего допустимого значения при больших коэффициентах загрузки (близких к номинальной).
При отсутствии влияния скорости вращения двигателя на производительность механизмов целесообразно поддерживать напряжение на зажимах двигателей не выше номинального при больших коэффициентах загрузки и ниже номинального при малых коэффициентах загрузки.
Экономические характеристики могут быть построены как для отдельных электроприемников, так и для узлов распределительной сети или для узлов нагрузки электрических систем.
Размещено компанией ООО «ЭЛТЕХКОМ-ЕК» [03.12.2009]
Источник
Как изменяются параметры трехфазного асинхронного двигателя при условиях, отличных от номинальных?
Понижение напряжения при номинальной частоте приводит к уменьшению тока холостого хода и магнитного потока, а значит, и к уменьшению потерь в стали. Величина тока статора, как правило, повышается, коэффициент мощности увеличивается, скольжение возрастает, а к. п. д. несколько падает. Вращающий момент двигателя уменьшается, так как он пропорционален квадрату напряжения.
При повышении напряжения сверх номинального и номинальной частоте двигатель перегревается из-за увеличения потерь в стали. Вращающий момент двигателя растет, величина скольжения уменьшается. Ток холостого хода увеличивается, а коэффициент мощности ухудшается. Ток статора при полной нагрузке может уменьшиться, а при малой нагрузке может увеличиться вследствие увеличения тока холостого хода.
При уменьшении частоты и номинальном напряжении увеличивается ток холостого хода, что приводит к ухудшению коэффициента мощности. Ток статора обычно возрастает. Увеличиваются потери в меди и стали статора, охлаждение двигателя несколько ухудшается вследствие уменьшения частоты вращения.
При повышении частоты сети и номинальном напряжении уменьшается ток холостого хода и вращающий момент.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Источник
Механические характеристики асинхронного двигателя при изменениях напряжения сети и активного сопротивления обмотки ротора
Из (13.14), (13.16) и (13.19) видно, что электромагнитный момент асинхронного двигателя, а также его максимальное и пусковое значения пропорциональны квадрату напряжения, подводимого к обмотке статора: М ≡ U 2 1. В то же время анализ выражения (13.15) показывает, что значение критического скольжения не зависит от напряжения U1. Это дает нам возможность построить механические характеристики М = f(s) дли разных значений напряжении U1 (рис. 13.5), из которых следует, что колебания напряжения сети U1 относительно его номинального значения U1ном, сопровождаются не только изменениями максимального и пускового моментов, но и изменениями частоты вращении ротора. С уменьшением напряжения сети частота вращения ротора
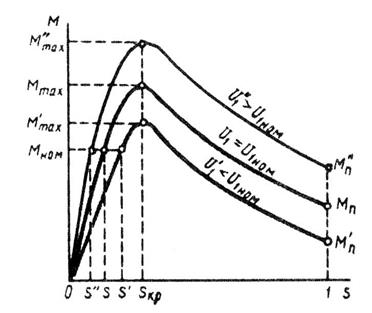
Рис. 13.5. Влияние напряжения на вид механической
характеристики асинхронного двигателя
снижается (скольжение увеличивается). Напряжение U1 влияет на значение максимального момента М1mах, а также на перегрузочную способность двигателя λ = Мmax /Mном . Так, если напряжение U1, понизилось на 30%, т. е. U1 = 0,7 U1ном, то максимальный момент асинхронного двигателя уменьшится более чем вдвое:
M / max = 0,7 2 Мmax = 0,49 Mmах. На сколько же уменьшится перегрузочная способность двигателя? Если, например, при номинальном напряжении сети перегрузочная способность λ = Mmax /Mном = 2 , то при понижении напряжения на 30% перегрузочная способность двигателя λ’ = М’max /Мном = 0,49 Mmax /Mном = 0,49  2 = 0,98 , т.е двигатель не в состоянии нести даже номинальную нагрузку.
2 = 0,98 , т.е двигатель не в состоянии нести даже номинальную нагрузку.
Как следует из (13.16), значение максимального момента двигателя не зависит от активного сопротивления ротора r / 2 . Что же касается критического скольжения sкр, то, как это видно из (13.15) оно пропорционально сопротивлению r2‘. Таким образом, если и асинхронном двигателе постепенно увеличивать активное сопротивление цепи ротора, то значение максимального момента будет оставаться неизменным, а критическое скольжение будет увеличиваться (рис. 13.6). При этом пусковой момент двигателя Мп возрастает с увеличением сопротивления r2‘ до некоторого значении. На рисунке это соответствует сопротивлению г2‘ш, при котором пусковой момент равен максимальному. При дальнейшем увеличении сопротивления r2‘ пусковой момент уменьшается.
Анализ графиков М = f(s) приведенных на рис. 13.6, также показывает, что изменения сопротивления ротора r2‘ сопровождаются изменениями частоты вращения: с увеличением r2‘ при неизменном нагрузочном моменте Мст скольжение увеличивается, т.е. частота вращения уменьшается (точки 1, 2, 3 и 4).
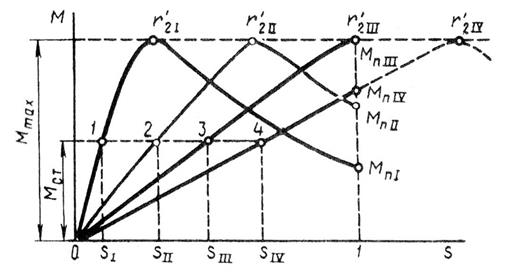
Рис. 13.6. Влияние активного сопротивленияобмотки ротора на механическуюхарактеристику асинхронного двигателя
Влияние активного сопротивления обмотки ротора на форму механических
характеристик асинхронных двигателей используется при проектировании двигателей. Например, асинхронные двигатели общего назначения должны иметь «жесткую» скоростную характеристику (см. рис. 13.7), т. е. работать с небольшим номинальным скольжением. Это достигается применением в двигателе обмотки ротора с малым активным сопротивлением r2‘ . При этом двигатель имеет более высокий КПД за счет снижения электрических потерь в обмотке ротора (Рэ2 = m1I /2 2) .Выбранное значение г2‘ должно обеспечить двигателю требуемое значение пускового момента. При необходимости получить двигатель с повышенным значением пускового момента
увеличивают активное сопротивление обмотки ротора. Но при этом получают двигатель с большим значением номинального скольжения, следовательно, с меньшим КПД.
Рассмотренные зависимости M = f(U1) и М = f(r2‘) имеют также большое практическое значение при рассмотрении вопросов пуска и регулирования частоты вращения асинхронных двигателей (см. гл. 15).
Источник
Механические характеристики асинхронного двигателя при изменениях напряжения сети и активного сопротивления обмотки ротора
Из (13.14), (13.16) и (13.19) видно, что электромагнитный момент асинхронного двигателя, а также его максимальное и пусковое значения пропорциональны квадрату напряжения, подводимого к обмотке статора: М ≡ U 2 1. В то же время анализ выражения (13.15) показывает, что значение критического скольжения не зависит от напряжения U1. Это дает нам возможность построить механические характеристики М = f(s) дли разных значений напряжении U1 (рис. 13.5), из которых следует, что колебания напряжения сети U1 относительно его номинального значения U1ном, сопровождаются не только изменениями максимального и пускового моментов, но и изменениями частоты вращении ротора. С уменьшением напряжения сети частота вращения ротора
Рис. 13.5. Влияние напряжения на вид механической
характеристики асинхронного двигателя
снижается (скольжение увеличивается). Напряжение U1 влияет на значение максимального момента М1mах, а также на перегрузочную способность двигателя λ = Мmax /Mном . Так, если напряжение U1, понизилось на 30%, т. е. U1 = 0,7 U1ном, то максимальный момент асинхронного двигателя уменьшится более чем вдвое:
M / max = 0,7 2 Мmax = 0,49 Mmах. На сколько же уменьшится перегрузочная способность двигателя? Если, например, при номинальном напряжении сети перегрузочная способность λ = Mmax /Mном = 2 , то при понижении напряжения на 30% перегрузочная способность двигателя λ’ = М’max /Мном = 0,49 Mmax /Mном = 0,49 2 = 0,98 , т.е двигатель не в состоянии нести даже номинальную нагрузку.
Как следует из (13.16), значение максимального момента двигателя не зависит от активного сопротивления ротора r / 2 . Что же касается критического скольжения sкр, то, как это видно из (13.15) оно пропорционально сопротивлению r2‘. Таким образом, если и асинхронном двигателе постепенно увеличивать активное сопротивление цепи ротора, то значение максимального момента будет оставаться неизменным, а критическое скольжение будет увеличиваться (рис. 13.6). При этом пусковой момент двигателя Мп возрастает с увеличением сопротивления r2‘ до некоторого значении. На рисунке это соответствует сопротивлению г2‘ш, при котором пусковой момент равен максимальному. При дальнейшем увеличении сопротивления r2‘ пусковой момент уменьшается.
Анализ графиков М = f(s) приведенных на рис. 13.6, также показывает, что изменения сопротивления ротора r2‘ сопровождаются изменениями частоты вращения: с увеличением r2‘ при неизменном нагрузочном моменте Мст скольжение увеличивается, т.е. частота вращения уменьшается (точки 1, 2, 3 и 4).
Рис. 13.6. Влияние активного сопротивленияобмотки ротора на механическуюхарактеристику асинхронного двигателя
Влияние активного сопротивления обмотки ротора на форму механических
характеристик асинхронных двигателей используется при проектировании двигателей. Например, асинхронные двигатели общего назначения должны иметь «жесткую» скоростную характеристику (см. рис. 13.7), т. е. работать с небольшим номинальным скольжением. Это достигается применением в двигателе обмотки ротора с малым активным сопротивлением r2‘ . При этом двигатель имеет более высокий КПД за счет снижения электрических потерь в обмотке ротора (Рэ2 = m1I /2 2) .Выбранное значение г2‘ должно обеспечить двигателю требуемое значение пускового момента. При необходимости получить двигатель с повышенным значением пускового момента
увеличивают активное сопротивление обмотки ротора. Но при этом получают двигатель с большим значением номинального скольжения, следовательно, с меньшим КПД.
Рассмотренные зависимости M = f(U1) и М = f(r2‘) имеют также большое практическое значение при рассмотрении вопросов пуска и регулирования частоты вращения асинхронных двигателей (см. гл. 15).
Источник
Искусственные механические характеристики ад при изменении параметров цепей статора, ротора и питающей сети.
Искусственные
механические характеристики АД можно
получить введением в цепь ротора или
статора добавочного сопротивления,
изменением величины и частоты питающего
напряжения и т.п. Рассмотрим, какое
влияние на механические характеристики
двигателя оказывают перечисленные
факторы.
-
При изменении подводимого к двигателю напряжения изменяется момент, т.К. Он пропорционален квадрату напряжения.
С инхронная
инхронная
скорость0и
критическое скольжение, а также форма
характеристики сохраняются. Изменится
величина скорости при МН, однако,
это изменение будет незначительным.
Уменьшение напряжения приводит к
значительному снижению перегрузочной
способностиМ,
но снижается и ток холостого хода. ПриU1=UHOMмагнитная цепь АД насыщена. УвеличениеU1приf=constприводит при равных условиях к быстрому
увеличению тока намагничивания. Т.к. у
двигателей нормального исполнения ток
холостого хода![]() ,
,
превышениеU1на
(2030)% может увеличитьI0до значений,
превышающихI1H,
и двигатель может нагреваться сверх
допустимой температуры даже при
отсутствии полезной нагрузки.
-
Введение
добавочного активного и индуктивного
сопротивления в цепь статора.Для
ограничения величины пускового тока
к.з. АД иногда в цепь статора вводят
добавочное активное или индуктивное
сопротивления. При этом уменьшаются
критический момент и критическое
скольжение в двигательном режиме.
Скорость, соответствующая критическому
скольжению, несколько возрастает.
Семейства механических характеристик
для этих случаев изображены на рисунках.
В
 ведение
ведение
в цепь статора добавочных сопротивлений
вызывает понижение напряжения на его
зажимах и уменьшает броски тока и
пускового момента, что важно для смягчения
ударов в передачах. Правда, в добавочном
активном сопротивлении теряется часть
энергии, а введение добавочного
индуктивного сопротивления уменьшает
коэффициент мощности двигателя.
Величина
сопротивления, включаемого в цепь
статора, определяется желаемым значением
пускового тока. Если требуется ограничить
пусковой ток двигателя до значения I![]()
= αI![]() ,
,
, где α<1,
то для этого полное сопротивление к.з.
в начальный момент пуска должно быть
![]() ,
,
где
![]()
— полное сопротивление к.з. при номинальных
условиях .
Расчетные
формулы для определения добавочных
сопротивлений можно найти используя
треугольники короткого замыкания.
Видно, что


3. Введение добавочного активного сопротивления в цепь ротора.

При
введении в цепь ротора AD
добавочного активного сопротивления
увеличивается критическое скольжение,
![]() ,
,
максимум критического момента смещается
в сторону больших скольжений, а величина
его не меняется, т.к. он не зависит от
активного сопротивления роторной цепи.
Введение в цепь ротора добавочного
активного сопротивления используется
для ограничения пускового тока и
увеличения пускового момента. Можно
ввести такоеRдаб
, при котором критическое скольжение
окажется равным 1 , а пусковой момент
двигателя равным критическому. Физически
увеличение пускового момента объясняется
увеличением активной составляющей
тока ротора (увеличением числа проводников
обмотки ротора, на которые электромагнитные
силы действуют по направлению вращения
и уменьшением числа проводников, на
которые электромагнитные силы действуют
против направления вращения). Семейство
механических характеристик двигателя,
соответствующих разным по величине
Rдаб
, введенным
в цепь ротора , изображено на рисунке.
4.
Изменение частоты питающей сети.
П ри
ри
изменении частоты питающей сети иUсети=U1=const,
меняется ω0=![]() и
и
критический момент, так как он зависит
от частоты обратно пропорционально её
квадрату. Изменяется и магнитный поток,
при чём он уменьшается с ростом частоты
и увеличивается при её уменьшении. Это
видно из уравнения равновесия ЭДС для
одной фазы статора:![]() . Пренебрегая падением напряжения в
. Пренебрегая падением напряжения в
цепи статора, можно написать для
абсолютных значений ЭДС и напряжения
приU1=const.
![]() .
.
Отсюда видно, что
при росте f1
поток уменьшается, а при уменьшении f1
он растет.
Этим объясняется и изменение критического
момента двигателя и его перегрузочной
способности.
У величение
величение
потока ведет к насыщению магнитной цепи
машины, увеличению намагничивающего
тока, следствием чего является ухудшение
энергетических показателей двигателя.
Уменьшение потока при постоянном моменте
нагрузки приведет к увеличению тока
ротора, что видно из выражения![]() ,
,
и потребляемого из сети тока, следовательно,
к перегрузке обмоток двигателя при
недоиспользованной стали. В обоих
случаях изменяется перегрузочная
способность двигателя. Поэтому для
наилучшего использования двигателя
желательно всегда поток иметь постоянным.
Для этого при изменении частоты необходимо
изменять и величину подводимого
напряжения, причем не только в функции
частоты, но и в функции нагрузки. В
простейшем же случае при изменении
напряжения в той же степени, что и
частоты, т.е. при![]() ,
,
механические характеристики будут
выглядеть так, как изображено на рисунке. Видно, что при
изменении напряжения только в функции
частоты по закону
![]() при частотах, меньших 0,5
при частотах, меньших 0,5
f1Н
перегрузочная способность двигателя
будет уменьшаться.
Это объясняется
влиянием падения напряжения на активном
сопротивлении обмотки статора, которое
приводит к уменьшению напряжения на
намагничивающем контуре обмотки статора,
к уменьшению магнитного потока и
следовательно, к уменьшению критического
момента двигателя.
Соседние файлы в папке электропривод
- #
- #
- #
- #
- #
- #
- #
при снижении напряжения питающей сети на 30В, мотор (230В, 2.4 кВт) по показаниям амперметра и вольтметра начинает потреблять из сети лишние 0.6 кВт эл. энергии, что примерно лишние 25% мощности от данных указанных производителем компрессора.
Можно ли уменьшить перерасход эл. энергии, во время пиковых нагрузок, когда снижено напряжение электросети, если установить повышающий трансформатор мощностью 0.4 кВт? Повысить напряжение питающей сети на 30В ?
…тепловое реле при этом не срабатывает. Может все-таки форма тока сильно искажается и амперметр начинает завышать показания?
Начну от печки — асинхронный электромотор является преобразователем электрической энергии в механическую БЕЗ обратной связи. Это означает, что он берёт электрическую мощность, отдаёт механическую, а себе оставляет лишь процент на нагрев. Если при неизменной нагрузке снизить напряжение сети, то это приведёт к изменению соотношений токов и напряжений (а также изменится и косинус фи), снизится КПД, но общая потребляемая от сети мощность тоже СНИЗИТСЯ, хотя и не пропорционально квадрату напряжения.
Вывод: при снижении напряжения сети перерасхода электроэнергии быть не может. А может лишь снижаться КПД, снижаться оброты вала (за счёт увеличения фазового отставания ротора от вращающегося магнитного поля) и, что самое опасное, снижается запас мощности электродвигателя, который может в какой-то момент привести к внезапному выходу из синхронизма и остановке двигателя.
Всё, что Вас напрягает, когда Вы смотрите на вольтметр и амперметр, является лишь кажущимся повышением мощности. Вы не видите ни изменения косинуса фи, ни (что важнее) изменения формы тока.
Из-за экономии железа и обмоток современные трансформаторы и электродвигатели проектируются так, что к концу каждого полупериода сетевого напряжения, сердечники входят в насыщение и в обмотках возникает мощный импульс тока. При снижении сетевого напряжения эти импульсы уменьшаются по амплитуде, но зато увеличиваются по ширине. Ваш амперметр, видимо, не в состоянии измерить и проинтегрировать амплитуду импульсов (тоже, наверное, входит в насыщение), зато нормально измеряет увеличение их ширины и этим обманывает Вас, показывая повышение общего тока. На самом деле этого нет. И подтверждает это во первых — тепловое реле, а во вторых — отсутствие перегрева двигателя. Ведь, если нагрузка неизменна, а потребление увеличится аж на 0,6 кВт, то двигатель должен был бы перевести эти 0,6 кВт в тепло. Несложный расчёт: 2,4 кВт при максимальной нагрузке и КПД 75% даст потери на нагрев 0,6 кВт. Если к ним присовокупятся ещё 0,6 кВт, которые Вы видите, перемножая вольты на амперы, то нагрев электродвигателя вырос бы ровно вдвое! Вы бы этого не смогли не заметить!
Так что, если Вам не грозит остановка двигателя при понижении напряжения сети и пуск двигателя не затруднён, то нет причин для беспокойства — никакого перерасхода электроэнергии нет!
Суть темы — в вопросе, поставленном в заголовок. Приводится сравнение с реостатным регулированием.
Идея пуска асинхронного привода при пониженном напряжении давно получила свое развитие и реализацию. Самый распространенный пример – пуск с переключением схемы соединения обмоток со «звезды» в «треугольник».
Во время пуска в «звезде» на каждую обмотку двигателя приходится меньшее напряжение, пусковой ток ограничивается и привод входит в работу в наиболее благоприятных условиях. Схожий эффект можно обеспечить и без снижения напряжения – выведением сопротивлений пускового реостата в цепи фазного ротора асинхронного двигателя.
Но реостат в роторной цепи применяют и для регулирования скорости привода, работающего под нагрузкой. Чем больше сопротивлений введено в цепь, тем ниже скорость привода. И проявляется этот эффект тем ярче, чем в большей степени будет загружен приводной двигатель. Это легко можно увидеть из семейства искусственных механических характеристик при реостатном регулировании.

Почему же для регулирования скорости привода никогда не применяют понижение напряжения? Казалось бы – ведь все просто: понижаем величину питающего напряжения и регулируем скорость. Как и в случае с реостатным регулированием, скорость холостого хода при пониженном напряжении оставалась бы неизменной (смотрим характеристику), а вот под нагрузкой скорость привода бы снижалась.
По сути – это то самое технически трудноосуществимое регулирование скорости асинхронного привода, к которому все стремятся. Технически это можно было бы реализовать введением опять же, регулируемого реостата, но не в роторную, а в статорную цепь.
При этом на сопротивлениях происходило бы падение питающего напряжения. А можно было бы организовать двухступенчатое регулирование скорости популярным переключением обмоток статора со «звезды» в «треугольник» и обратно. Только осуществлять такое переключение пришлось бы не при пуске, а во время работы.
Однако такой способ регулирования скорости асинхронного двигателя не применяется. Дело в том, что механическая мощность двигателя – это произведение скорости вращения рабочего вала на его же момент вращения. Мощность, разумеется, снижается, если мы вводим сопротивления в роторную цепь или понижаем питающее напряжение. Но снижается она по-разному.
При включении сопротивлений в роторную цепь мощность двигателя снижается за счет скорости. Это удобно для регулирования: при постоянном моменте понижается скорость, а работоспособность двигателя сохраняется. Привод не теряет способности выдерживать номинальную нагрузку. Немного понижается КПД, но это недостаток, с которым в некоторых условиях вполне можно смириться.
Иное дело – понижение питающего напряжения. Мощность при этом понижается не только за счет скорости, но и за счет крутящего момента на валу. При понижении питающего напряжения в два раза момент двигателя снижается в четыре раза, то есть зависимость квадратичная.
Конечно, скорость привода при низком напряжении будет ниже, но момент на валу может снизиться до такой степени, что привод просто встанет. Именно поэтому, кстати, пуск при пониженном напряжении применяется только для приводов, имеющих возможность запуска при отсутствии нагрузки на валу.
Из-за резкого падения вращающего момента на валу регулирование скорости понижением напряжения для асинхронных двигателей нельзя считать эффективным. Схемы с включением сопротивлений в статорную цепь, подключением автотрансформатора и переключением со «звезды» на «треугольник» состоятельны только для пуска привода при отсутствии нагрузки.