-44-
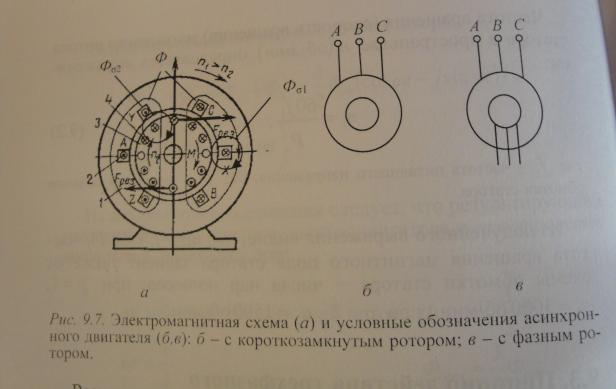
На рисунке представлена электромагнитная схема АД с короткозамкнутой обмоткой ротора в разрезе, включающая статор (1), в пазах которого расположены три фазные обмотки статора (2), представленные одним витком. Начала фазных обмоток A, B, C, а концы соответственно X, Y, Z. В цилиндрическом роторе (3) двигателя расположены стержни (4) короткозамкнутых обмоток, замкнутых по торцам ротора пластинами.
При подаче на фазные обмотки статора трехфазного напряжения в витках обмотки статора протекают токи статора iA, iB, iC, создающие вращающееся магнитное поле с частотой вращения n1. Это поле пересекает стержни короткозамкнутой обмотки ротора и в них индуцируются ЭДС, направление которых определяется по правилу правой руки. ЭДС в стержнях ротора создают токи ротора i2 и магнитное поле ротора, которое вращается с частотой магнитного поля статора. Результирующее магнитное поле АД равно сумме магнитных полей статор и ротора. На проводники с током i2, расположенные в результирующем магнитном поле, действуют электромагнитные силы, направление которых определяется правилом левой руки. Суммарное усиление Fрез, приложенное ко всем проводникам ротора, образует вращающий эле5ктромагнитный момент M асинхронного двигателя.
Вращающий электромагнитный момент М, преодолевая момент сопротивления Мс на валу, принуждает вращаться ротор с частотой n2. Ротор вращается с ускорением, если момент М больше момента сопротивления Мс, или с постоянной частотой, если моменты равны.
Частота вращения ротора n2 всегда меньше частоты вращения магнитного поля машины n1, т. к. только в этом случае возникает вращающий электромагнитный момент. Если частота вращения ротора будет равна частоте вращения МП статора, то ЭМ момент равен нулю (стержни ротора не пересекают МП двигателя, и ток равен нулю). Разница частот вращения МП статора и ротора в относительных единицах называется скольжением двигателя:

-45-
s=n1−n2 . n1
Скольжение измеряется в относительных единицах или процентах по отношению к n1. В рабочем режиме близком к номинальному скольжение двигателя составляет 0.01-0.06. Частота вращения ротора n2=n1(1−s) .
Таким образом, характерной особенностью асинхронной машины является наличие скольжения — неравенства частот вращения магнитного поля двигателя и ротора. Поэтому машину называют асинхронной.
При работе асинхронной машины в двигательном режиме частота вращения ротора меньше частоты вращения МП и 0 < s < 1. в этом режиме обмотка статора питается от сети, а вал ротора передает механический момент на исполнительный орган механизма. Электрическая энергия преобразуется в механическую.
Если ротор АД заторможен (s = 1) – это режим короткого замыкания. В случае, если частота вращения ротора совпадает с частотой вращения МП, то вращающий момент двигателя не возникает. Это режим идеального холостого хода.
Чтобы изменить направление вращения ротора (реверсировать двигатель), нужно изменить направление вращения МП. Для реверса двигателя нужно изменить порядок чередования фаз подведенного напряжения, т. е. Переключить две фазы.
-46-
9. Схема замещения и механическая характеристика трехфазного асинхронного двигателя.
|
I1 |
R1 |
x1 |
x’2 |
R’2 |
||||
|
I0 |
I’2 |
1-s |
||||||
|
~ |
U1 |
x0 |
Rн=R’ —— |
|||||
|
E |
=E‘ |
2 |
s |
|||||
|
1 |
2 |
R0 |
||||||
|
I1 |
R1 |
x1 |
x’2 |
R’2 |
||||
|
R1 |
x1 |
I’2 |
1-s |
|||||
|
I0 |
Rн=R’ —— |
|||||||
|
U |
x0 |
2 |
s |
|||||
|
1 |
E =E‘ |
|||||||
|
R0 |
||||||||
|
1 |
2 |
|||||||
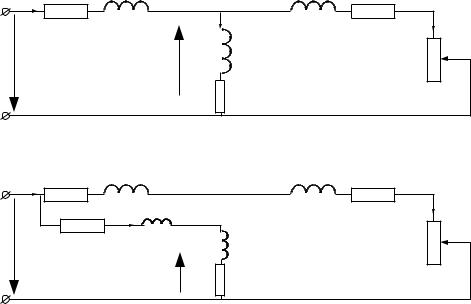
В схеме асинхронная машина с электромагнитной связью статорной и роторной цепей заменена эквивалентной приведенной схемой замещения. При этом параметры обмотки ротора R2 и x2 приводятся к обмотке статора при условии равенства E1 = E2‘. E2‘, R2‘, x2‘ – приведенные параметры ротора.
|
Активное сопротивление |
R |
=R‘ |
1−s |
рассматривается как внешнее сопротивление, |
|
н |
2 |
s |
включенное в обмотку неподвижного ротора, т. е. машина имеет активную нагрузку.
Величина этого сопротивления определяется скольжением, а, следовательно, механической нагрузкой на валу двигателя. Если момент сопротивления на валу двигателя Мс = 0, то скольжение s = 0; при этом величина Rн=∞ и I2‘ = 0, что соответствует работе
двигателя в режиме холостого хода.
В режиме холостого хода ток статора равен току намагничивания I1 = I0. Магнитная цепь машины представляется намагничивающим контуром с параметрами x0, R0 – индуктивное и активное сопротивления намагничивания обмотки статора. Если момент сопротивления на валу двигателя превышает его вращающий момент, то ротор останавливается. При этом величина Rн = 0, что соответствует режиму короткого замыкания.
Первая схема называется Т-образной схемой замещения АД. Она может быть преобразована в более простой вид. С этой целью намагничивающий контур Z0 =R0+ jx0
выносят на общие зажимы. Чтобы при этом намагничивающий ток I0 не изменял своей величины, в этот контур последовательно включают сопротивления R1 и x1. В полученной Г- образной схеме замещения сопротивления контуров статора и ротора соединены последовательно. Они образуют рабочий контур, параллельно которому включен намагничивающий контур.
Величина тока в рабочем контуре схемы замещения:
|
-47- |
||||||||||||||||
|
I‘2= |
U 1 |
= |
U1 |
, где U1 – фазное |
||||||||||||
|
‘ |
‘ 1−s 2 |
‘ |
2 |
√(R1+ |
R‘2 |
2 |
‘ 2 |
|||||||||
|
√(R1+R2+R2 s |
) +( x1 +x2) |
) +(x1+x2) |
||||||||||||||
|
s |
напряжение сети.
Электромагнитный момент АД создается взаимодействием тока в обмотке ротора с вращающимся МП машины. Электромагнитный момент М определяется через электромагнитную мощность:
|
M = |
Pэм |
, где |
ω |
1= |
2π n1 |
— угловая частота вращения МП статора. |
|||||||
|
ω1 |
60 |
||||||||||||
|
M = |
Pэ2 |
= |
m1 I 2‘ 2 R‘2 |
, т. е. ЭМ момент пропорционален мощности электрических |
|||||||||
|
ω1 s |
|||||||||||||
|
ω1 s |
|||||||||||||
|
потерь в обмотке ротора. |
|||||||||||||
|
m |
U |
2 R2‘ |
|||||||||||
|
1 s |
|||||||||||||
|
M = |
1 |
||||||||||||
|
R‘ |
2 |
||||||||||||
|
2ω1[( R1+ |
2 |
) +(x1+ X 2‘ )2] |
|||||||||||
|
s |
Приняв в уравнении число фаз двигателя m1 = 3; x1 + x2‘ = xк, исследуем его на экстремум. Для этого приравниваем производную dM / ds к нулю и получаем две экстремальные точки. В этих точках момент Мк и скольжение sк называются критическими и соответственно равны:
|
s |
= |
±R‘2 |
|||||
|
к |
√R12+sк2 |
, где «+» при s > 0, “-” при s < 0. |
|||||
|
M к= |
3U12 |
||||||
|
2ω1( R1±√ |
) |
||||||
|
R12+X к2 |
Зависимость ЭМ момента от скольжения M(s) или от частоты вращения ротора M(n2) называется механической характеристикой АД.
Если разделить M на Mк, получим удобную форму записи уравнения механической характеристики АД:
|
M = |
2 M к (1+asк) |
, где |
a= |
R1 |
. |
|||||||||
|
sк |
||||||||||||||
|
s |
+ |
+2asк |
R2‘ |
|||||||||||
|
sк |
s |
|||||||||||||
|
Для АД мощностью выше 10 кВт можно считать, что R1 = 0. Тогда |
||||||||||||||
|
M = |
2M к |
,M |
= |
3U ф2 |
, s |
= |
R2‘ |
. |
||||||
|
2ω1 xк |
||||||||||||||
|
s |
+ |
sк |
к |
к |
xк |
|||||||||
|
sк |
s |
Для изменения направления электронного мотора понадобится две схемы и возможность это сделать несколькими способами, такая процедура не сложная по применению и займет немного времени. Замена направления вращений в трехфазном движке в применении очень просто.
Изменение направления вращающегося двигателя с тремя фазами просто и быстро, способы применения
Состав статьи:
- Принцип работы трехфазного асинхронного мотора
- Определение вращения
- Переменная сеть 380 к 220 вольт
- Реверсирование трехфазных инструментов
- Реверсирование однофазных синхронных инструментов
- Реверс коллекторных моторов
- По какой причине измена вращения электродвигателя не произошло?
- Изменение направления вала в трехфазных инструментах
- Переподключение рабочей намотки
- Переподключение пусковой намотки
Трехфазный мотор
Наиболее часто используемый электродвигатель с короткозамкнутой обвивке ротора, или иными словами беличье колесо. Представляет собой прибор измененного потока, который состоит из статора и тремя витками, в котором магнитные поля сдвинуты на 120 градусов и при подаче 3х фазного напряжения образуется циркуляция магнитного поля в магнитной цепи машины мотора, а ротор – вращается только с такой же скоростью что и статор. Определяют синхронный или асинхронный с помощью разворотов, если ротор двигается так как и статор то это синхронный мотор, но если ротор медленнее статора то уже асинхронный. Асинхронный более используемый.
Наиболее благоприятным периодом работы двигателя трех фаз является изменение круговорота. Другими словами реверсирование. Из-за того, что ликвидируется намагничивание электрических полей и аппарат перегревается и идет утечка мощности машины. Более, схемы реверсирования запуска в применении легче чем трансмиссии на механике (которые состоят из зубчатых шестерней). Но очень много нюансов происходит при изменение направления тока, ведь самую полярность вращений питания невозможно.
Принцип работы трехфазного асинхронного мотора
Для включения асинхронного мотора в сеть нужно соединить клетень звездой или треугольником. На выводе может быть не написано маркировка прибора, что очень важно, то нужно самому определить начало и конец витков.
При запуске обмоток статора в асинхронном аппарате трех фаз изменчивого тока образовывается магнитное поле, с регулированием частоты цикла n1.
Движущееся магнитное поле задевает так как и клетень статора и ротора, и индуцирует на них ЭДС. В обмотке наводится ЭДС самоиндукции, которая идет навстречу напряжению сети и ограничивает количество тока в коробке.
Обвивка ротора должна быть замкнута коротко у двигателей с короткозамкнутым ротором, или из-за сопротивления у электрических моторах с фазным ротором. Это значит, что с действием ЭДС (Е2) появляется ток. Взаимодействие индуцируемого потока в роторе, с движущемся магнитным полем, создает электромагнитную силу Фэм.
Направление фэм силы можно находить по правилу левой руки. К примеру:
Полюса магнитного поля асинхронного мотора вращаются против часовой стрелки. В другом моменте они также будут в другом положении. (рис 1)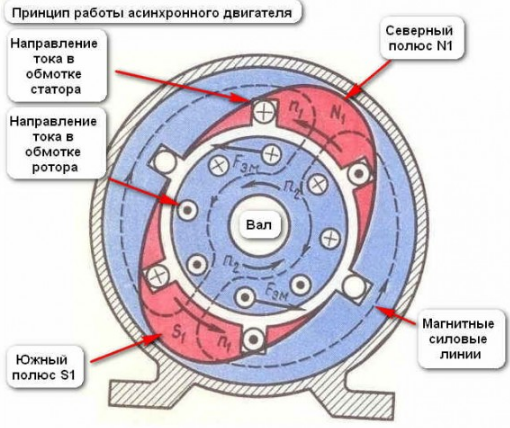
Токи на рисунке в виде крестиков и точек. Крестик это когда ток от вас направлен. И если точка, то в вашу сторону. Пунктиром нарисованы силовые линии магнита поворотов в поле статора. Ладонь нужно так положить, чтобы эти силовые магниты входили в ладонь. Четыре пальца должны быть направлены в сторону потока в обвивке. А большой палец поднятый вверх (как обычно) покажет направление фэм потока для конкретного проводника.
Определение вращения
Для идентификации циркуляции мотора важно со стороны одного конца вала. Если же в нем есть две стороны, то берется вал с диаметром больше чем первый. Согласно техническим правилам, правое направление в сторону часовой стрелки. У наиболее используемых трехфазных моторчиках с короткозамкнутым ротором обороты в правую сторону будут создаваться, если последовательность подачи напряжения на концах стартовой виток будет в соответствии их маркировке.
Изменная сеть 380 к 220 вт
Чтобы подсоединить трехфазный асинхронного аппарата к 220 нужно задействовать такой же или несколько триммеров для компенсирования пустой фазы. Ориентирование будет зависит от соединения третьей клетени, каким способом она сделается.
Чтобы задействовать циркуляция в противоположную сторону желательно третью проводку вмонтировать к тумблеру конденсатора на двух позициях. В нем будет два коммуникации, составлены между собой первой и второй намоткой.
При таком подходе три фазы будут в роли однофазного моторчика, поелику подключились с одинакового шнура. Для запуска данного агрегата надобно перевести тумблер оборотов в необходимое направление вперед или назад. Далее его запуск положить в позицию «включен». Мгновение пуска за необходимости ткнуть пальцем кнопку. Держать не более три секунды, этого достаточно.
Реверсирование трехфазных инструментов
Курс ритма вращающегося поля магнитов асинхронных двигателей прямо пропорционально от последовательности подачи сизигии, в независимости от тактики соединения статорных обмоток. Тем, кто уже сталкивался с такой темой, уже известно, что имеется две манипуляции совмещения обмоток – звезда и треугольник.
К примеру, фазы А, Б, В подаются на входные клеммы 1, 2, 3 один к одному, в итоге циркуляция пусть будет в сторону часовой стрелки, а если соответственно на клеммы 2,1,3 то будет против стрелки идти. Такой способ с пускателем не нуждается в дополнительных действий, как это откручивание гаек в коробке и вручную переставлять провода клемм.
Трехфазные асинхронные двигатели на 380 Вт собственно соединять магнитным пускателем, в нем три допустимых контакта расположены на одной раме и замыкаются вместе. Они как бы выполняют действия которые задает им катушка – соленоида, также магнитная. Работает она как и на 380 и на 220 вольт. Это избавит человека от коммуникацией с напряжением, так как оно опасно.
Для пуска реверса тока используют несколько переходников. Клеммы давления питания соединены по порядочной системе сначала: один к одному, два к двум и далее. А на выходе встречным путем: четыре – пять, пять-четыре. Для обхода пробоя изоляции, если при нажатии на две кнопки одновременно, сила на втягивающей катушке подсоединяется с помощью дополнительных контактов противоположных пускателей. Требовательно при замкнутых контактах основной группы, линия идущая на соленоид дополнительного аппарата была разомкнута.
На пульте устанавливается пост на три потока с одной позицией – одно нажатие с одним действием кнопками. Первая кнопка «остановка» и две «запуск». Разъем шнура такой:
- Кабель на кнопке стоп (нормально замкнутая должна быть все время) а ее перемычки на пуск (нормально разомкнута все время).
- Со «стопа» два кабеля переводится на дополнительные контакты пускателей, которые замыкаются на старте: так они блокируют мотор.
- Кнопкой пуск по одному проводу на крест проводится дополнительные контакты, которые при старте размыкаются.
Реверсирование однофазных синхронных инструментов
Для пуска такого мотора нужно иметь вторую обвивку на статоре, далее важно подключить в цепь фазосдвигающий фрагмент как бумажный конденсатор. Реверсирование происходит только там, где обе клетени однозначные – диаметр проводов, количество витков, и они не должны отключатся после пуска оборотов.
Схема реверсирования такова: фазовый конденсатор будет переподключаться к каждой из витков по очереди. Пример двигателя силой в 2,2 кВт. (рис 2)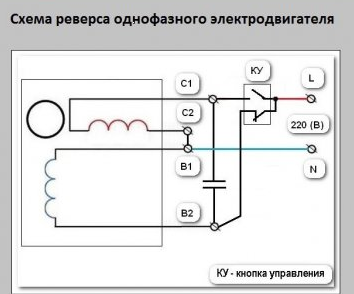
В клеммной коробке есть шесть выводов. Чтобы задать мотору обращения, нужно:
- На клеммы W2 и V1 направить сетевое напряжение
- Конец одной из обмоток крепится к клеммам U1 и U2, и чтобы они подпитывались их соединяют перемычками.
- Концы второй обмотки соединяют с клеммами W2 и V2.
- Движущий конденсатор подключают к клеммам V1 и V2. W1 остается сама.
Чтобы мотор вращался в обратную сторону, надо изменить положение перемычек. Схема автоматического реверсирования также осуществляется на двух магнитных пусках и трех кнопках. Две из них должны быть нормально разомкнуты для запуска, а одна нормально замкнута для остановки.
Реверс коллекторных моторов
Аналогична схема как и в постоянном токе с последовательным пробуждением. Одна щетка для снятия тока коллектора соединяется к клетени ротора, а напряжение исходит на другую щетку и вывод статорной обвивке.
Переполюсовка ротора и статора будет одновременной если изменить положение штепсельной вилки розетки. Направление не меняется из-за того. Тоже и происходит в двигателе непрерывного тока при одновременном перемене полярности питания на клетени напряжения и якоря. Изменение порядка (фаза – ноль) желательно только в случае электронного оборудования когда коллектор обеспечивает и пространственное и электрическое разделение проводников. Якорные витки изолированы. Есть два типа применения:
- Изменение местоположения щеток физическим способом. Нерационально, так как изменения вносятся в конструкцию принудительно. Может вывести из строя щетки прибора, так как рабочая форма не будет совпадать с поверхностной нормой.
- Измена положения перемычки с узлом между щеткой и витках в клеммной коробке возбуждения. Также и точки сетевого кабеля. Можно сделать с многопозиционного выключателя или двух пускателей с магнитом
Нельзя забывать, что работоспособность из-за перекомпоновке в коробке клемм, или соединение по схемам реверса должны выполняться без напряжения, аппарат должен быть строго выключен.
По какой причине измена вращения электродвигателя не произошло?
Через то, что момент запуска асинхронного мотора с симметричной обвивке равносильно нулю. Асинхронный моторчик важно подсоединить в такой соответственности:
- От трехфазной сети ( меняется местами любые из трех проводов между собой)
- Мотор берет силу из триммера 1 фазной сети ( вывод конденсатора отключается, он соединяется с любым проводом и питает его, затем переключается на следующий)
- Электромотор питается от инвертора 3х фаз ( тут желательно работать с инструкцией, довольно сложный механизм).
- Работу по перемене циркуляции можно делать только когда агрегат не подключен ни к чему.
Поэтому, замена направления оборотов делается только для трехфазных двигателей предназначенных для трехфазной сети. Принципом смены вращения в асинхронном двигателе это смена его направления.
Перемена положения вала в трехфазных инструментах
Для некоторых аппаратов эксплуатация возможна с помощью левостороннего круговорота. Для замены нужно:
- Выключить двигатель, должен быть без какого либо питания
- Забрать крышку с клеммной коробки
- На силовом кабеле переставить местами жилы. Изоляционную черного цвета (3) переставить на контакт V1 в клеммах, а коричневый провод на (2) на контакт W1.
Но если двигатель хочет постоянно переключаться с права налево оборотов, то нужно это сделать по схеме.
Перемена циркуляции с короткозамкнутым ротором
Асинхронные двигатели с короткозамкнутым статором включать в постоянный ток не требуется, потому что для роторного оборотов нужно магнитное поле в движении которое создает неизменный поток. Неизменный же ток не может задать вращения магнитам. Из этого исходит что лучше включить в сеть простой коллекторный двигатель ( такой как ручной электроинструмент).
Для этого надо только поменять обмоточные данные (перемотку) полюсов в якоре так как при работе намотки на переменчивом токе, кроме сопротивления) есть индуктивное сопротивление также. На постоянном потоке индуктивный отпор не присутствует и вообще он в витках будет равен активному противодействию.
А вот движок с неизменным током и предварительно измененными данными намотки не будет работоспособным на переменном потоке. Его полюса сделаны из изолированных листов металлической электрической стали. При потоке меняющегося тока обмотки в массивном полюсе, будет создаваться вихор, он в свою очередь заставляет прибор нагревается, его клетени и полюса.
Переподключение рабочей намотки
Для изменения направления смены маршрута можно только поменять местами конец и начало рабочей ветки. МОжно сообразить что для этого нужно открывать корпус и раскручивать намотку. Но это не обязательно, можно все сделать снаружи
- Четыре провода исходящие их корпуса это начала рабочей и пусковой намотки. Два из них начало, а два конці. Желательно обозначить какие будут для рабочих проводов.
- К этой паре будут присоединены два полюса, фаза и ноль. При выключенном моторе реверсирование нужно сделать методом постановления фазы с одного контакта намотки на конечный, а ноль – с конечного на первую или тот, что напротив.
- По итогу выходит система, где точки меняются между собой местами. В такой способ ротор будет двигаться в обратном положении.
Переподключение пусковой намотки
При подключении пусковой намотки асинхронный двигатель будет вращаться в противоположную сторону. Он возможен если в движке присутствуют отдельные отводы работающей и пусковой намотки, тогда и будет реально сделать замену движения.
В двигателе есть концы обмоток, к примеру А и Б, два провода соединены между собой внутри механизма. Тогда в нем есть три вывода вместо четырех. Для такого прибора можно поменять оборотов поменяв местами рабочую и пусковые обвивки.
Заключение:
- Изменение направления кружений двигателей постоянного тока исходит путем замены направления токов в обмотке якоря или путем изменения в витке возбуждения.
- Одновременно в обоих приборах измена не совершится, нужно выбрать один из вариантов.
- Для двигателей с большой мощностью изменение возможно с дополнительным аппаратом контроллер.
- При дистанционном управлении для перемены поворотов, двигатель оснащают реверсивным магнитным пускателем.
- Направление в роторе зависит от направления полей в статоре. Чтобы изменить их в статоре, меняют местами два провода, которые подойдут к статорной намотке.
- Реверсирование с параллельным или смешанным возбуждением делается с помощью перемены стороны тока в обвивке якоря. С последовательным возбуждением либо в обмотке якоря либо в возбуждения.
Попов А.П., Батрак А.И. Частотное регулирование оборотов асинхронного двигателя — файл n1.doc
приобрести
Попов А.П., Батрак А.И. Частотное регулирование оборотов асинхронного двигателя
скачать (17888 kb.)
Доступные файлы (1):
- Смотрите также:
- Исследование асинхронного двигателя с короткозамкнутым ротором (Документ)
- Лабораторная работа №5 Испытание трёхфазного асинхронного двигателя в трёхфазном и однофазном режиме Цель (Документ)
- Расчет трехфазного асинхронного двигателя с короткозамкнутым ротором (Документ)
- 5 Исследование правильности выполнения внутренних соединений трехфазного асинхронного двигателя (Документ)
- Проектирование асинхронного трехфазного двигателя с короткозамкнутым ротором 4А200L4У3 ip44 45,0 кВт 1500 об/мин ic0141 im10010 (Документ)
- Тема : Схема нереверсивного пуска асинхронного двигателя (Документ)
- Лукичев Д.В. Моделирование статических характеристик асинхронного двигателя в пакете MATLAB (Документ)
- Регулирование скорости вращения Ад изменением числа пар полюсов (Документ)
- Лабораторная работа №1 аэп 2 пэ моделирование асинхронного двигателя на основе обобщенной двухфазной машины (Документ)
- Кривохижа Я.В., Серов А.Е. Электрические машины переменного тока (Документ)
- Попов А.Н. Управление асинхронным электроприводом при стабилизации ЭДС двигателя (Документ)
- Алексеев В.В., Алексеев П.В. Методические указания к расчету асинхронного двигателя Часть 1, 2 (Документ)
n1.doc
Федеральное агентство по образованию
Государственное образовательное учреждение
высшего профессионального образования
«Омский государственный технический университет»
ЧАСТОТНОЕ РЕГУЛИРОВАНИЕ ОБОРОТОВ
АСИНХРОННОГО ДВИГАТЕЛЯ
Методические указания к лабораторной работе
Омск
Издательство ОмГТУ
2008
Составители: А. П. Попов, д-р техн. наук, проф..
А. И. Батрак
Методические указания содержат краткие теоретические сведения по принципу действия, теории и характеристикам асинхронного двигателя, описание лабораторного стенда по электрическому приводу, в состав которого входят частотный преобразователь с микропроцессорным управлением, асинхронный двигатель и трехфазный генератор, оснащенный выпрямителем и электронным стабилизатором выходного напряжения, и порядок выполнения лабораторной работы. Лабораторная работа выполняется в соответствии с рабочими программами по дисциплинам «Общая электротехника» и «Общая электротехника и электроника».
Печатается по решению редакционно-издательского совета Омского государственного технического университета.

ЧАСТОТНОЕ РЕГУЛИРОВАНИЕ ОБОРОТОВ АСИНХРОННОГО
ДВИГАТЕЛЯ
Цель работы: ознакомление с устройством, принципом действия, основными характеристиками асинхронного трехфазного электродвигателя с короткозамкнутым ротором с частотным регулированием оборотов.
1. ОСНОВНЫЕ ПОНЯТИЯ, УСТРОЙСТВО, ПРИНЦИП ДЕЙСТВИЯ
И ХАРАКТЕРИСТИКИ АСИНХРОННЫХ ДВИГАТЕЛЕЙ (АД)
В зависимости от назначения АД выполняются с трехфазной или двухфазной обмоткой статора. В технике наиболее распространены трехфазные АД.
Асинхронный трехфазный электродвигатель состоит из неподвижного статора (рис. 1) и вращающегося ротора (рис. 2, 3). Статор двигателя представляет собой полый цилиндр, собранный из отдельных тонких листов электротехнической стали, изолированных друг от друга с целью уменьшения потерь мощности в магнитопроводе на гистерезис и вихревые токи. В пазах сердечника статора уложена трехфазная обмотка статора, выполненная из изолированного провода и состоящая из трех отдельных обмоток фаз, оси которых сдвинуты в пространстве относительно друг друга на угол 120°. Обмотки фаз соединяются между собой звездой или треугольником, в зависимости от значения подводимого напряжения.
Ротор АД изготовляют в двух исполнениях: короткозамкнутым (рис. 3) и с контактными кольцами (рис. 2).
Короткозамкнутый ротор представляет собой ферромагнитный сердечник в виде цилиндра с пазами, в которые уложена обмотка ротора, состоящая из медных или алюминиевых стержней. Эти стержни соединяются между собой торцовыми кольцами и образуют цилиндрическую клетку. В большинстве случаев клетка ротора отливается из алюминия или из сплава на его основе. Для уменьшения потерь мощности в магнитопроводе ротор, так же как и статор, собирают из отдельных изолированных друг от друга листов электротехнической стали.


Рис. 1.Неподвижный статор Рис. 2. Вращающийся ротор

Рис. 3. Короткозамкнутый ротор АД Рис. 4. Электрическая схема регулирования пускового момента АД
В некоторых конструкциях ротор имеет на одном валу с ним контактные кольца, называемый иногда также фазным, имеет трехфазную обмотку, выполненную изолированным проводом, которая в конструктивном отношении мало чем отличается от обмотки статора двигателя. В большинстве случаев обмотка ротора соединяется в звезду. Свободные концы обмотки подводятся к контактным кольцам ротора. В процессе работы контактные кольца скользят по неподвижным щеткам и при этом обеспечивают электрическое соединение обмотки вращающегося ротора с трехфазным неподвижным реостатом, подключенным к щеткам (рис. 4).
Такое устройство позволяет изменять активное сопротивление электрической цепи ротора АД в процессе его вращения, что необходимо для уменьшения значительного пускового тока, а также для регулирования частоты вращения ротора АД при работе и изменения пускового момента двигателя.
При подаче к трехфазной обмотке статора АД трехфазного напряжения в каждой его фазе будет создаваться магнитный поток, изменяющийся во времени с частотой питающей сети. При этом магнитные потоки отдельных фаз оказываются сдвинутыми относительно друг друга на угол 120° как во времени, так и в пространстве.
Возникаемый при этом результирующий магнитный поток оказывается вращающимся. В теоретической части курса электротехники показано, что значение результирующего магнитного потока постоянно во времени, при этом поток вращается в пространстве с угловой скоростью вращения, пропорциональной частоте подводимого напряжения.
Для изменения направления вращения ротора АД необходимо изменить направление вращения магнитного поля, т. е. изменить порядок чередования фаз обмотки статора переключением любых двух из трех проводов, питающих двигатель от трехфазной системы подводного напряжения.
Результирующий магнитный поток при своем вращении пересекает проводники обмотки ротора и наводит в них ЭДС. Так как обмотка ротора АД имеет замкнутую электрическую цепь, в ней возникает ток, который, взаимодействуя с магнитным потоком статора, создает электромагнитный момент двигателя. Под действием этого момента ротор вращается в сторону вращающегося магнитного потока двигателя, причем частота вращения ротора двигателя всегда меньше частоты вращения вращающегося магнитного поля. Если ротор вращается с частотой поля, то его обмотка не пересекается этим полем и в ней не наводится ЭДС. Следовательно, при отсутствии тока в роторе электромагнитный момент двигателя равен нулю. При этом двигатель замедляет свой ход до тех пор, пока в роторе не появится ток, необходимый для обеспечения соответствующего момента, и двигатель продолжает вращаться при этой частоте вращения n2.
Частота вращения магнитного поля (синхронная частота вращения) находится в строгой зависимости от частоты f1 подводимого напряжения и числа пар полюсов р двигателя; п1 = 60f1/р.
Из этого следует, что при принятой в стране промышленной частоте питающего напряжения (fi = 50 Гц) наибольшее число оборотов магнитного поля оказывается равным 3000 об/мин при p = 1. При увеличении числа пар полюсов частота вращения магнитного поля уменьшается, а следовательно, снижается и частота вращения ротора n2 двигателя. При p= 2, n1= 1500 об/мин и т. д.
АД характеризуется номинальными данными, на которые он рассчитан. Основные технические данные двигателя указываются в соответствующих каталогах, справочниках, а также в паспортах, выполненных в виде специальных табличек, закрепленных на корпусах двигателей.
Асинхронные трехфазные электродвигатели имеют шесть выводов обмотки статора (три у начала и три у конца обмоток фаз). Начала обмоток каждой из трех фаз маркируются С1, С2, С3, а концы соответственно С4, С5, С6.
Подобная конструкция обмотки статора дает возможность соединять обмотки фаз двигателя как по схеме треугольника, так и по схеме звезда. Благодаря этому каждый трехфазный электродвигатель можно использовать при двух различных по значению напряжениях питающей сети (линейном и фазном), ![]() .
.
Одним из важнейших показателей, характеризующих работу АД, является скольжение ротора, под которым понимается отношение:
s = (n1—n2)/n1,
где n2 – частота вращения ротора электродвигателя, об/мин; п1 = 60f1/р – синхронная частота вращения электромагнитного поля.
Для большинства современных типов АД скольжение ротора при номинальной нагрузке составляет 2…6 %, а при работе в режиме холостого хода, т. е. когда электродвигатель работает без нагрузки на валу, – доли процента.
При вращении ротора с частотой вращения поля его скольжение оказывается равным нулю (s = 0). При частоте вращения ротора равной нулю, т. е. при неподвижном роторе, скольжение ротора равно единице (s = 1).
Разность частот вращения n1—n2= sn1 представляет собой частоту скольжения, т. е. частоту вращения поля статора двигателя относительно его ротора. Нетрудно видеть, что от частоты скольжения, а также от значения магнитного потока Ф, характеризующего вращающееся магнитное поле, зависит и значение ЭДС Е2, наводимой в обмотке ротора, а следовательно, ток ротора I2 и его частота:
![]() (1)
(1)
При увеличении нагрузки на валу электродвигателя, обусловленной возрастанием момента сопротивления, частота вращения ротора уменьшается, а скольжение его возрастает. Это вызывает увеличение ЭДС ротора Е2S, а следовательно, токов ротора и статора АД. При этом мощность P1, потребляемая из сети, также возрастает.
При неподвижном роторе вращающееся магнитное поле в обмотках статора и ротора АД будет наводить переменные ЭДС, действующие значения которых можно определить по формулам, аналогичным формулам, полученным для ЭДС трансформатора:
Е1 = 4,44k1f1w1Фm , E2 = 4,44k2f1w2Фm,
где Е1 – фазное значение ЭДС, наводимой в обмотке статора; Е2 – фазное значение ЭДС, наводимой в обмотке ротора при неподвижном его состоянии (s = 1; n2 = 0); w1, w2 – число витков в фазе статора и ротора; Фm – амплитудное значение магнитного потока фазы АД; k1, k2 – обмоточные коэффициенты статора и ротора АД.
В отличие от трансформатора, вследствие конструктивных особенностей АД, вращающийся магнитный поток не будет одновременно сцеплен со всеми витками обмоток статора и ротора, что учитывается обмоточными коэффициентами k1 и k2, меньшими единицы (у трансформатора k1 ? k2 ?1).
При вращении ротора АД в процессе работы в нем наводится переменная ЭДС E2S с частотой скольжения f2S, значение которой можно найти путем замены в выражении для Е2 частоты f2 = sf1 на f2S:
E2S = 4,44k2w2 f2SФm = sE2. (2)
Отсюда следует, что ЭДС вращающегося ротора находят по ЭДС неподвижного ротора, умножая ее значение на скольжение, соответствующее данной частоте вращения ротора электродвигателя.
При работе АД под действием ЭДС Е2S, возникающей во вращающемся роторе, в цепи обмотки ротора возникает ток I2s, который в соответствии с законом Ома для данной цепи можно найти, исходя из выражения:
![]() ,
,
где Z2S – полное сопротивление фазы ротора; R2 – активное сопротивление фазы ротора; Х2S – индуктивное сопротивление фазы ротора на частоте f2S.
С учетом того, что Е2S = sE2 и X2S = 2?f2SL2 = sX2, L2 – индуктивность рассеяния обмотки ротора, получаем выражение для тока ротора при вращении в другом виде:
![]()
![]() . (3)
. (3)
Из формулы видно, что ток ротора при вращении можно определить через ЭДС Е2 неподвижного ротора. Сопротивление Х2, входящее в выражение для тока ротора, соответствует частоте fi и является постоянным, а активное сопротивление электрической цепи ротора при этом зависит от скольжения и находят его как отношение ![]()
Действительно: ![]() .
.
С учетом выражения для тока (3) схема замещения вращающегося ротора АД может быть приведена к схеме замещения неподвижного ротора, представленной на рис. 5.

Рис.5. Схема замещения неподвижного ротора

Рис. 6. Полная электрическая схема замещения АД
При построении схемы замещения АД, параметры схемы замещения ротора, подобно тому, как это было сделано для вторичной обмотки трансформатора, приводят к числу витков и ЭДС обмотки статора электродвигателя. В результате полная схема замещения АД имеет вид, показанный на рис. 6, приведенные параметры схемы замещения ротора определяются следующим образом:


Рис. 7. Электрическая диаграмма АД при работе двигательном режиме
Представление о распределении потока энергии, потребляемой АД из сети, дает энергетическая диаграмма рис. 7, на которой дана полная структура потерь мощности, возникающих при работе в асинхронном электродвигателе:
![]() – активная мощность, подводимая к электродвигателю из сети; U1 – фазное напряжение статора;
– активная мощность, подводимая к электродвигателю из сети; U1 – фазное напряжение статора;
![]() – электрические потери мощности в активном сопротивлении обмотки (потери в меди) статора; где m1 – число фаз обмотки статора; I1 – ток фазы статора;
– электрические потери мощности в активном сопротивлении обмотки (потери в меди) статора; где m1 – число фаз обмотки статора; I1 – ток фазы статора;
![]() – потери мощности в магнитопроводе статора, равные сумме потерь мощностей на гистерезис и вихревые токи (потери в стали статора);
– потери мощности в магнитопроводе статора, равные сумме потерь мощностей на гистерезис и вихревые токи (потери в стали статора);
![]() – электромагнитная мощность, передаваемая ротору вращающимся магнитным полем;
– электромагнитная мощность, передаваемая ротору вращающимся магнитным полем;
![]() – потери мощности в магнитопроводе ротора, равные сумме потерь мощностей на гистерезис и вихревые токи в роторе (потери в стали ротора);
– потери мощности в магнитопроводе ротора, равные сумме потерь мощностей на гистерезис и вихревые токи в роторе (потери в стали ротора);
![]() – электрические потери мощности на активном сопротивлении обмотки ротора;
– электрические потери мощности на активном сопротивлении обмотки ротора;
Рм – суммарная механическая мощность, развиваемая АД;
Рмех – механические потери мощности в двигателе (потери мощности, возникаемые от трения в подшипниках и трения ротора о воздух);
Р2 = Рм = Рмех – полезная механическая мощность на валу двигателя, кВт.
Электромагнитный момент, развиваемый АД, можно получить, исходя из его электромагнитной мощности:![]()
![]() , (4)
, (4)
откуда электромагнитный момент
![]() , (5)
, (5)
где постоянная ![]() .
.
Из формулы видно, что электромагнитный момент АД пропорционален произведению вращающегося магнитного потока Фm на ток ротора и косинус угла сдвига по фазе между током ротора I2 и его ЭДС Е2.
Электромагнитную мощность, передаваемую в ротор, можно определить следующим образом (исходя из эквивалентной схемы замещения рис. 6)
![]() . (6)
. (6)
Часть этой мощности представляет собой потери на гистерезис и вихревые токи в сердечнике ротора, часть – электрические потери в обмотке ротора. (Оставшаяся часть ![]() поглощается в сопротивлении
поглощается в сопротивлении ![]() эквивалентной схемы замещения рис. 6). Потери на гистерезис и вихревые токи в роторе малы из-за низкой частоты скольжения магнитного поля статора относительно ротора. Поэтому их можно не учитывать. Тогда суммарную механическую мощность, развиваемую двигателем, можно определить следующим образом:
эквивалентной схемы замещения рис. 6). Потери на гистерезис и вихревые токи в роторе малы из-за низкой частоты скольжения магнитного поля статора относительно ротора. Поэтому их можно не учитывать. Тогда суммарную механическую мощность, развиваемую двигателем, можно определить следующим образом:
![]() . (7)
. (7)
Мощность Рм является результатом преобразования электрической энергии в механическую.
Если учесть, что ![]() , тогда используя (7), а также учитывая, что
, тогда используя (7), а также учитывая, что ![]() , получим
, получим
![]() . (8)
. (8)
Величину пускового момента получаем из (8) после подстановки в него s = 1 (ротор при пуске не вращается, т. е. s = 1):
![]() . (9)
. (9)
Приведенный ток ротора ![]() можно выразить через параметры схемы замещения АД (см. рис. 6). Если пренебречь током I0 в связи с тем, что он мал по сравнению с током
можно выразить через параметры схемы замещения АД (см. рис. 6). Если пренебречь током I0 в связи с тем, что он мал по сравнению с током ![]() , т. е. принять его равным нулю, то можно записать
, т. е. принять его равным нулю, то можно записать
 , (10)
, (10)
где ![]() .
.
С учетом выражения (10) получаем формулу для момента АД
 . (11)
. (11)
Из формулы видно, что момент АД пропорционален квадрату подводимого напряжения и зависит от скольжения S. Причем имеется такое скольжение ротора, при котором электродвигатель развивает наибольший (критический) момент Мк. Максимальное (критическое) скольжение Sк ротора, соответствующее критическому моменту АД, можно найти, взяв производную момента по скольжению (пренебрегая активным сопротивлением обмотки статора R1 вследствие его относительной малости) и приравняв ее нулю. Тогда получим
![]() .
.
Подставив Sк в (11) (с учетом того, что R1 ![]() 0), получаем выражение для критического момента АД:
0), получаем выражение для критического момента АД:
 . (12)
. (12)
Зависимость момента АД от скольжения ротора M(s), построенная согласно (12), имеет вид, представленный на рис. 8. Эта зависимость фактически является механической характеристикой АД.

Рис. 8. Механическая характеристика АД
Анализ показывает, что в интервале скольжений от 0 ![]() S
S ![]() S к механическая характеристика будет устойчивой, так как dM/ds > 0, т. е. при возрастании момента нагрузки на валу происходит возрастание момента, развиваемого АД. В то же время в интервале скольжении от S = Sк до S = 1 механическая характеристика АД оказывается неустойчивой, так как dMIds < 0.
S к механическая характеристика будет устойчивой, так как dM/ds > 0, т. е. при возрастании момента нагрузки на валу происходит возрастание момента, развиваемого АД. В то же время в интервале скольжении от S = Sк до S = 1 механическая характеристика АД оказывается неустойчивой, так как dMIds < 0.
Если учесть, что между скольжением ротора и частотой вращения ротора АД существует прямая взаимосвязь, то, выразив скольжение через частоту вращения ротора, представляем зависимость частоты вращения АД от момента в виде кривой n2(М), также называемой механической характеристикой АД (рис. 9).

Рис. 9. Механическая характеристика АД
Графики зависимости момента М, мощности P1, коэффициента мощности cos?1, КПД ?, скольжения ротора s и тока статора I1 от полезной мощности, т. е. мощности на валу двигателя Р2 (рис.10), являются рабочими характеристиками АД.

Рис. 10. Рабочие характеристики АД
Характер зависимости коэффициента мощности АД от мощности на валу, определяется выражением ![]() .
.
Значение коэффициента мощности для АД средней мощности при номинальной нагрузке составляет 0,83…0,89. С уменьшением нагрузки на валу двигателя коэффициент мощности снижается и доходит до значений 0,2…0,3 при холостом ходе. В этом режиме полезная мощность на валу равна нулю, однако при этом двигатель потребляет определенное количество электрической энергии из сети, поэтому коэффициент мощности не равен нулю. С увеличением нагрузки сверх номинальной наблюдается некоторое снижение значения коэффициента мощности за счет увеличения падения напряжения на индуктивной составляющей сопротивления обмотки статора АД. Характер изменения коэффициента мощности от нагрузки АД имеет примерно такой же вид и изменяется по тем же причинам, что и у трансформатора.
Зависимость КПД АД от нагрузки ?(Р2) определяется соотношением:
? = Р2 /P1 = Р2 /(Р2 + P?),
где Р1 – активная мощность, потребляемая двигателем из питающей сети; P? = Рм + Рэ1 + Рэ2 + Pмех – суммарные потери мощности в двигателе, равные сумме потерь мощности в магнитопроводе, электрических потерь мощности в обмотках статора, электрических потерь мощности в обмотке ротора, механических потерь и др.
С увеличением мощности на валу, т. е. с увеличением нагрузки двигателя, вызываемой возрастанием момента сопротивления исполнительного механизма, частота вращения (число оборотов) ротора уменьшается, а его скольжение при этом возрастает, вызывая увеличение ЭДС E2 в обмотках ротора, а, следовательно, возрастание токов ротора и статора. При неизменном магнитном потоке двигателя это приводит к увеличению момента, развиваемого двигателем. Таким образом, с увеличением нагрузки на валу равновесие между моментом, развиваемым двигателем, и моментом сопротивления наступает при снижении частоты вращения, т. е. при возрастании механической нагрузки на валу электродвигателя происходит снижение частоты вращения ротора.
При включении АД в питающую сеть обмотка статора, обтекаемая переменным током, создает вращающееся магнитное поле. В момент пуска частота вращения ротора электродвигателя равна нулю, поэтому в обмотке ротора наводится ЭДС большой величины. При этом токи ротора и статора в несколько раз превосходят номинальные их значения, так как они увеличиваются с увеличением скольжения ротора, т. е. с уменьшением его частоты вращения (рис. 11).
Пусковой ток АД с короткозамкнутым ротором I1пуск в 5… 10 раз превышает номинальный I1ном (Mпуск = 1,1…1,8Мном). Так как этот ток протекает по обмоткам электродвигателя кратковременно только в процессе пуска, он не опасен для двигателя в тепловом отношении, если пуски двигателя не очень часты. Поэтому пуск АД с короткозамкнутым ротором, как правило, проводится прямым включением в сеть на полное напряжение. Однако большой пусковой ток крупных электродвигателей опасен не только для самого двигателя, он может вызвать значительное снижение напряжения, особенно в маломощных питающих сетях, что отрицательно сказывается на работе других потребителей электроэнергии, подключенных к той же сети. В этих случаях возникает необходимость ограничивать пусковой ток АД при включении их в питающую сеть.

Рис. 11. Зависимость вращающего момента и тока статора АД от скольжения
Снижение напряжения на обмотках АД при пуске может быть достигнуто различными способами: а) пуском с использованием автотрансформатора или индукционного регулятора; б) пуском с переключением обмотки статора со звезды на треугольник; в) пуском с включением дополнительного сопротивления в обмотку статора двигателя. Однако при снижении напряжения при пуске пусковой момент АД резко снижается, так как он пропорционален квадрату питающего напряжения ![]() . Поэтому указанные способы пуска, как правило, применяются для приводных двигателей тех механизмов, для пуска которых не требуется большой пусковой момент (при пуске двигателя вхолостую или двигателя вентилятора и других механизмов).
. Поэтому указанные способы пуска, как правило, применяются для приводных двигателей тех механизмов, для пуска которых не требуется большой пусковой момент (при пуске двигателя вхолостую или двигателя вентилятора и других механизмов).
Асинхронный электродвигатель с фазным ротором пускают в ход с помощью пускового реостата, включенного последовательно с обмоткой ротора (см. рис. 4). В начальный момент пусковое активное сопротивление реостата вводится в цепь двигателя полностью. С увеличением оборотов частота вращения вращающегося магнитного поля по отношению к ротору уменьшается. Соответственно уменьшаются ЭДС и ток ротора. Поэтому с увеличением частоты вращения двигателя можно постепенно уменьшать значение пускового сопротивления в цепи обмотки ротора, не опасаясь того, что ток двигателя возрастет до значений, опасных для него. При полностью выведенном сопротивлении пускового реостата пуск двигателя заканчивается.
Такой способ позволяет обеспечить необходимый для пуска пусковой момент двигателя. Значение пускового момента зависит от значения активного сопротивления в цепи ротора и может быть доведено до критического момента Мк двигателя.
Существенный недостаток АД – относительно сложное регулирование частоты их вращения.
Возможные способы регулирования частоты вращения АД можно установить в результате анализа выражения, записанного относительно частоты вращения ротора двигателя: ![]() . Анализ этой формулы показывает, что частоту вращения АД можно изменить, изменяя число пар полюсов р двигателя или частоту f1 питающего напряжения.
. Анализ этой формулы показывает, что частоту вращения АД можно изменить, изменяя число пар полюсов р двигателя или частоту f1 питающего напряжения.
Кроме того, регулирование частоты вращения АД с короткозамкнутым ротором может быть достигнуто за счет изменения напряжения на зажимах двигателя. При уменьшении напряжения критический момент АД уменьшается, жесткость механической характеристики также уменьшается, а скольжение ротора двигателя при том же моменте нагрузки возрастает. Происходит уменьшение частоты вращения электродвигателя. Регулирование частоты вращения АД при этом способе возможно только в незначительном диапазоне скольжений, который ограничивается критическим моментом.
Регулирование частоты вращения асинхронных короткозамкнутых двигателей, как указывалось, возможно путем изменения числа пар полюсов, что применимо для многоскоростных двигателей. Сущность этого регулирования заключается в том, что скорость вращения магнитного поля АД зависит от числа пар полюсов обмотки статора. Таким образом, если на статоре АД разместить две или несколько отдельных обмоток с разными числами пар полюсов, то при включении в сеть каждой из обмоток в отдельности можно получить различные частоты вращения магнитного поля и вращения ротора.
Кроме электродвигателей, рассчитанных на одну частоту вращения, отечественная промышленность выпускает двух-, трех- и четырехскоростные асинхронные короткозамкнутые электродвигатели с соответствующим числом пар полюсов.
Регулирование частоты вращения АД путем переключения числа пар полюсов производится без потерь мощности. Однако многоскоростные электродвигатели гораздо сложнее по конструкции и дороже обычных односкоростных. При этом регулирование частоты вращения оказывается ступенчатым, не плавным.
Регулирование частоты вращения АД может быть осуществлено и путем изменения частоты напряжения, подводимого к обмотке статора. При этом происходит изменение частоты вращения магнитного поля и частоты вращения ротора электродвигателя (рис. 12).

Рис. 12. Механические характеристики АД при изменении частоты напряжения
на обмотках статора
Существенным недостатком частотного способа регулирования является необходимость применения специального оборудования, в частности преобразователей частоты, что усложняет систему электропривода и увеличивает стоимость установки. Однако с развитием полупроводниковой техники, появлением мощных частотных преобразователей (ЧП) оснащенных современными микропроцессорными системами, этот способ нашел широкое применение.
Принцип действия такого ЧП, использованного в данном лабораторном стенде, описан в [5].
Целью данной лабораторной работы является исследование механических характеристик АД с частотным регулированием оборотов.
2. ОПИСАНИЕ ЛАБОРАТОРНОГО СТЕНДА
В состав лабораторного стенда входят:
- механическая система, состоящая из АД «2» и генератора «1», связанных между собой приводным ремнем, датчик тока «3» (рис. 13);
- частотный преобразователь с панелью управления (рис.14).
Упрощенная электрическая схема лабораторного стенда представлена на рис.15
Номинальные параметры двигателя
Тип электродвигателя 4А80А2У3
Номинальное напряжение (U1ном), В. 3х220/380
Номинальная мощность (P2ном ), кВт 1,5 кВт
Номинальный ток (I1ном), А 8,2/4,64 А
Номинальная частота напряжения питания (f1ном), Гц 50
Номинальная частота вращения ротора (n2ном), об/мин 2835
Номинальный КПД (? ном), % 80
Номинальный коэффициент мощности (cos?1ном) 0,87
Параметры схемы замещения этого двигателя при работе в номинальном режиме: ![]() Ом,
Ом, ![]() Ом,
Ом, ![]() Ом,
Ом, ![]() Ом,
Ом, ![]() Ом,
Ом, ![]() Ом (эквивалентные параметры АД приведены в [1]).
Ом (эквивалентные параметры АД приведены в [1]).
В качестве нагрузки АД использован автомобильный генератор тока типа 3212.3771000, генерирующий трехфазную систему ЭДС, оснащенный трехфазным выпрямителем и стабилизатором выходного напряжения выпрямителя.
Паспортные данные генератора
Тип генератора 3212.3771000
Назначение – для питания бортовой сети автомобилей Газ-3110, 3102 и др.
Номинальная мощность 1258 Вт
Направление вращения со стороны шкива правое
Выпрямленный ток не менее 90А
Номинальное напряжение 14 В
Обороты nрн? 2130 об/мин
Минимальная частота вращения ротора генератора, при которой выходное напряжение достигает номинального равного 14 В для данного типа генератора установки……………………………………………………1400 об/мин
В качестве нагрузки системы генератор – выпрямитель – стабилизатор использована нихромовая спираль 9 (рис. 14), сопротивление которой изменяется ступенчато с помощью переключателя 11, температура нагрева которой при протекании постоянного тока достигает нескольких сот градусов.
Частотный преобразователь (ЧП), назначение, паспортные данные
Частотный преобразователь расположен на панели управления (рис.14)
Модель FR-S520SE-1,5кВт
Мощность 1,5 кВт
Входной ток 17,4 А
Uc 220 – 240 В
Количество фаз на входе 1
Частота входного напряжения 50 Гц
Выходой ток 7 А (max)
Uвых 200 – 240 В
Количество фаз на выходе 3
Частота выходного напряжения 0,5 – 120 Гц
Подключение к сети осуществляется путем нажатия кнопки «кн.1» на панели управления. Автоматический выключатель защиты от короткого замыкания и перегрузок «2» должен находиться во включенном состоянии.
Частотный преобразователь (ЧП) позволяет получить 3-фазную систему ЭДС с плавным регулированием частоты выходного напряжения в диапазоне от 1-75 Гц, т. е. обеспечивать скорость вращения магнитного поля в диапазоне 60 – 4500 оборотов в минуту.
Плавная регулировка частоты осуществляется потенциометром «5» (рис. 14) (на дисплее ЧП «6» частота высвечивается в герцах).
Выходное напряжение ЧП вырабатывается силовым блоком, управляемым микроконтроллером. В качестве силовых электронных ключей используются силовые транзисторы JGBT (биполярные транзисторы, управляемые электрическим полем).
Временная форма выходного напряжения ЧП представляет собой прямоугольные импульсы постоянной амплитуды, модулированные по длительности в течении каждого периода по ширине (широтно-импульсная модуляция) по синусоидальному закону.

Рис.13. Трехфазный АД, нагруженный на генераторную установку

Рис.14. Частотный преобразователь с панелью управления

Рис.15. Упрощенная электрическая схема лабораторного стенда 
Рис. 16. Схема измерения фазного напряжения ЧП
На панели управления расположены трансформаторы тока «7» и «8» (рис. 14) предназначенные для измерения входного тока ЧП и тока одной из обмоток статора АД, включенных по схеме «звезда» (рис. 16).
На панели управления размещены также выключатели «14» (обеспечивают включение дистанционного управления, реверс вращения АД, включение блока напряжения для возбуждения генератора «1» (рис. 13)).
На стенде предусмотрена возможность измерения напряжения фазы «А» обмотки статора АД. Для этого к фазам А, В, С, ЧП подключена резисторная цепь, представляющая звезду с заземленной общей точкой (рис. 16). Ветвь фазы «А» этой звезды представляет собой делитель фазного напряжения, состоит из последовательно соединенных сопротивлений большой величины ![]() кОм и измерительного сопротивления малой величины Rизм=3 кОм. Это позволяет измерить низковольтным электронным прибором действующее значение напряжения фазы «А» обмотки статора.
кОм и измерительного сопротивления малой величины Rизм=3 кОм. Это позволяет измерить низковольтным электронным прибором действующее значение напряжения фазы «А» обмотки статора.
Для этого необходимо падение напряжения на измерительном сопротивлении (Uф.изм.) умножить на масштабирующий коэффициент равный ![]() , тогда
, тогда
UфА=44,3 · Uф.изм. (13)
К каждой вторичной обмотке трансформаторов тока ТТ1 и ТТ2 (для обеспечения режима короткого замыкания) подключены измерительные сопротивления малой величины RTT1=RTT2=1 Ом. При этом ток первичной обмотки ТТ1 (который является входным током ЧП) определяется следующим образом:
![]() , (14)
, (14)
а фазный ток АД
![]() . (15)
. (15)
(В формулы (14) и (15) значения напряжений измеряются в вольтах, сопротивлений в омах).
Напряжения UTT1 и UTT2 подведены к клеммам «13» пульта управления, а напряжения с делителя фазного напряжения подведено к клемме «4».
3. ЗАДАНИЕ НА ВЫПОЛНЕНИЕ РАБОТЫ
1. Ознакомиться с устройством лабораторного стенда (3-фазный АД с короткозамкнутым ротором, автомобильный генератор, частотный преобразователь, пульт управления), правилами пользования тахометром и прибором для измерения действующего значения тока.
2. Осуществить режим нагрузки АД при частотном регулировании оборотов. Выявить зависимости частоты вращения ротора АД при различных скоростях вращения магнитного поля от момента на валу двигателя и построить механические характеристики АД для различных скоростей вращения магнитного поля статора.
3. Выявить зависимость рабочего момента генераторной установки от оборотов ротора для фиксированной нагрузки. Построить механическую характеристику генераторной установки для этой нагрузки.
4. Составить краткие выводы по работе.
Выполнение первого задания
Перед подключением стенда к однофазной сети 220 В необходимо выполнить следующие действия:
1. Установить:
– переключатель нагрузки генератора «11» в положение «0»;
– автоматический выключатель «10» в включенное состояние (верхнее положение);
– автоматический выключатель «2» в включенное состояние (верхнее положение).
2. Соединить кабель системы АД-Генераторная установка к стенду ЧП.
3. Подключить напряжение сети 220 В к стенду.
4. Подключить ЧП к сети путем нажатия кнопки «1», при этом срабатывает магнитный пускатель «3» и подает напряжение 220 В на ЧП.
5. Перевести ЧП в режим работы с встроенного пульта путем нажатия кнопки «PU/EXT» на ПЧ, при этом загорится индикатор «PU».
6. С помощью потенциометра «5» устанавливается частота напряжения, подводимого к АД. По показаниям дисплея ЧП (показания выводятся на дисплее в Гц).
7. Запустить двигатель путем нажатия кнопки на панели управления ЧП «RUN».
Выполнение второго задания
- В начале измерить на частоте подводимого напряжения f1 = 50 Гц обороты ротора АД и ток статора IфАД на холостом ходу. При этом переключатель нагрузки генератора «11» установить в положение «0», возбуждение генератора не включать, т.е. кн. «12» не нажимать.
- Подать питание на обмотку возбуждения генератора. Для этого кратковременно нажать кнопку «12» (1…2 секунды).
- Провести необходимые измерения для построения механической характеристики АД n2=f(M) для трех значений сопротивления нагрузки генератора, задаваемой переключателем нагрузки П11 (рис.14, положение 0,1,2) вначале на установленной частоте ЧП 50 Гц. (Данные занести в табл. 1).
Измерительные приборы
Выходное напряжение генераторной установки (ГУ) измеряется мультиметром (в режиме измерения постоянного напряжения).
Число оборотов n2 АД измеряется цифровым тахометром.
Расчет момента
Момент на валу АД рассчитывается по формуле (8), заменяя в этой формуле ток ![]() на
на ![]() (т.к. приближенно можно считать их равными):
(т.к. приближенно можно считать их равными):
 (16)
(16)
Для используемого АД р = 1, т = 3, ![]() Ом,
Ом, ![]() , п1 = f1·60 об/мин (UTT2 измеряется цифровым мультиметром, подключаемым к клеммам «8»).
, п1 = f1·60 об/мин (UTT2 измеряется цифровым мультиметром, подключаемым к клеммам «8»).
Значение момента при критическом скольжении рассчитывается по (12) Н·м
 ,
,
где Х1 = 3,39 Ом, ![]() = 5,4 Ом, т = 3.
= 5,4 Ом, т = 3.
Механическая характеристика для каждой скорости вращения магнитного поля строится по четырем расчетным значениям М. Участок характеристики между третьим и четвертым значением (М = Мк) изображается пунктирно, плавным продолжением основной кривой до пересечения с перпендикуляром, проведенным из точки Мк, как показано на рис.17.
- Таким же образом произвести измерения и построения механических характеристик АД на двух других частотах подводимого напряжения (частота задается преподавателем). Данные записать в табл. 2, 3, аналогичные по форме табл. 1.
Результаты измерения механических характеристик АД на различных
частотах подводимого к АД напряжения Таблица № 1
| f1 = 50 Гц | ||||
| Скорость вращения магнитного поля статора | п1, об/мин | 3 0 0 0 | ||
| Скорость вращения ротора | п2, об/мин | |||
| Нагрузка двигателя | Положение переключателя П11 | 0 | 1 | 2 |
| Ток статора невозбужденного генератора | IФ1, А | M? | Не выполнять | Не выполнять |
| Ток статора при возбуждении генератора | IФ1, А | |||
Расчетные значения моментов  |
Н·м | М1 | М2 | М3 |
| Выходное напряжение ГУ
Uвых в |
В |
(М? – значение момента АД на холостом ходу АД и генератора при токе возбуждения равном нулю).

Рис. 17. Построение участка 3 — 4 механических характеристик АД на различных частотах
подводимого к АД напряжения
Выполнение третьего задания
При выполнении этого задания необходимо иметь в виду, что момент, развиваемый АД, уравновешен моментом, возникающим на валу генераторной установки в результате превращения механической энергии в электрическую, которая в свою очередь преобразуется в тепловую энергию (нагрев спирали 9 (рис.14)).
В связи с этим практический интерес представляет механическая характеристика пг = f(Мг) рабочего механизма, которым в данном случае является генераторная установка (пг – скорость вращения вала генератора при заданном сопротивлении нагрузки, подключаемой к выходу выпрямителя генераторной установки; Мг – крутящий момент на валу генератора). Для выявления этой зависимости необходимо выполнить следующие измерения.
- Установить П11 в положение «1».
- Подать напряжение сети на вход ЧП и на АД, установить частоту выходного напряжения ЧП 20 Гц, включить АД и возбуждение генератора.
- Измерить обороты ротора АД п2, ток IфА, Uвых в. Методика измерения этого тока описана ранее, а скорость вращения ротора генератора с учетом разности диаметров шкивов определяется следующим образом:
пг = 6/7·п2. (18)
По току IфА и значению п2 рассчитывается момент на валу АД по (16). Момент на валу генератора с учетом (18) определяется как
Мг = 6/7·М.
Таким же образом выполняются измерения на других значениях частоты подводимого к АД напряжения (30, 40, 50 Герц).
Данные измерений п2, пг, IфА, f1, Uвых в заносятся в табл. 4 и по данным таблицы строится график зависимости пг = f(Мг).
Форма заполнения таблицы экспериментальных данных
по третьему заданию Таблица № 4
| Положение П11 «1» | ||||
| f1, Гц | 20 | 30 | 40 | 50 |
| п2, об/мин | ||||
| пг, об/мин | ||||
| IфА, А | ||||
| М, Н·м
(рассчитывать по (16)) |
||||
| Мг, Н·м
(момент на валу ГУ) |
||||
| Uвых в, В |
График зависимости пг = f(Мг) наносится на механические характеристики АД. Точки пересечения этого графика с механическими характеристиками АД определяют скорости вращения ротора АД на частотах f1, f2, f3, f4 подводимого к АД напряжения.
Контрольные вопросы
- Объясните устройство и принцип действия трехфазного асинхронного электродвигателя с короткозамкнутым ротором.
- Как изменить направление вращения трехфазного АД?
- Объясните частотную характеристику АД.
- Как изменяется механическая характеристика АД с изменением питающего напряжения?
- Как изменяется частота тока ротора АД с изменением нагрузки на валу?
- Перечислите все виды потерь мощности в асинхронных электродвигателях.
- Назовите способы регулирования частоты вращения асинхронных двигателей с короткозамкнутым ротором.
- Увеличится или уменьшится момент на валу генератора, если ток нагрузки увеличится?
- Для чего в автомобильной генераторной установке необходим электронный стабилизатор напряжения?
СОДЕРЖАНИЕ ОТЧЕТА
- Рассказать о цели лабораторной работы.
- Лабораторный стенд (тип двигателя, генераторная установка, пульт управления, упрощенная электрическая схема лабораторного стенда).
- В чем заключается сущность регулирования оборотов АД?
- Методика измерения зависимости оборотов АД п2 = f(М) при различной частоте подводимого напряжения.
- Измерительные приборы, применяемые в ходе эксперимента.
- Таблицы и графики, полученные в ходе эксперимента.
- Выводы.
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
- Асинхронные двигатели серии 4А: справ. / Кравчик, М.М. Шлаф, В.И. Афонин, Е.А. Соболевская. – М.: Энергоиздат, 1982. – 504 с., ил.
- Огорелков, Б.И., Общая электротехника: учеб. пособие для неэлектротехн. спец. / Б.И. Огорелков, А.П. Попов. – Омск: изд-во ОмГТУ 2008 – 230 с.
- Касаткин, А.А. Электротехника / А.А. Касаткин, М.В. Немцов. – М.: Высш. шк. 1999 – 541 с.
- Рекус, Г.Г. Лабораторный практикум по электротехнике и основам электроники: Учеб. пособие для неэлектротехн. спец. вузов. – 2-е изд., перераб. и доп. – М.: Высш. шк., 2001 – 255 с.: ил.
- Соколовский, Г.Г. Электроприводы переменного тока с частотным регулированием: учебник для студ. высш. учеб. заведений / Г.Г. Соколовский. – М.: Изд. центр «Академия», 2006. – 272 с.
Редактор Т. А. Жирнова
ИД № 06039 от 12.10.2001 г.
Свободный темплан 2008 г.
Подписано в печать …. Формат 60х84 1/16. Бумага офсетная.
Отпечатано на дубликаторе. Усл. печ. л. …. Уч.-изд. л. ….
Тираж … экз. Заказ ….

Издательство ОмГТУ. 644050, г. Омск, пр-т Мира, 11
Типография ОмГТУ
Реверсивное подключение однофазового асинхронного мотора своими руками
Перед выбором схемы подключения однофазового асинхронного мотора принципиально найти, сделать ли реверс. Если для настоящей работы для вас нередко необходимо будет поменять направление вращения ротора, то целенаправлено организовать реверсирование с внедрением кнопочного поста. Если однобокого вращения для вас будет довольно, то подойдет самая обычная схема без способности переключения. Но что делать, если после подсоединения по ней вы решили, что направление необходимо все таки поменять?
Постановка задачи
Представим, что у уже подсоединенного с внедрением пускозарядной емкости асинхронного однофазового мотора вначале вращение вала ориентировано по часовой стрелке, как на картинке ниже.
Уточним принципиальные моменты:
- Точкой А отмечено начало пусковой обмотки, а точкой В – ее окончание. К исходной клемме A подсоединен провод кофейного, а к конечной – зеленоватого цвета.
- Точкой С помечено начало рабочей обмотки, а точкой D – ее окончание. К исходному контакту подсоединен провод красноватого, а к конечному – голубого цвета.
- Направление вращения ротора обозначено при помощи стрелок.
Ставим впереди себя задачку – сделать реверс однофазового мотора без вскрытия его корпуса так, чтоб ротор начал крутиться в другую сторону (в данном примере против движения стрелки часов). Ее можно решить 3-мя методами. Разглядим их подробнее.
Вариант 1: переподключение рабочей намотки
Чтоб изменить направление вращения мотора, можно только поменять местами начало и конец рабочей (неизменной включенной) обмотки, как это показано на рисунке. Можно поразмыслить, что для этого придется вскрывать корпус, доставать намотку и крутить ее. Этого делать не надо, так как довольно поработать с контактами снаружи:
- Из корпуса должны выходить четыре провода. 2 из их соответствуют началам рабочей и пусковой намоток, а 2 – их концам. Обусловьте, какая пара принадлежит только рабочей обмотке.
- Вы увидите, что к этой паре подсоединены две полосы: фаза и ноль. При отключенном движке произведите реверс методом перекидывания фазы с исходного контакта намотки на конечный, а нуля – с конечного на исходный. Либо напротив.

В итоге получаем схему, где точки С и D изменяются меж собой местами. Сейчас ротор асинхронного мотора будет крутиться в другую сторону.
КАК ИЗМЕНИТЬ НАПРАВЛЕНИЕ ВРАЩЕНИЕ ВАЛА В ОДНОФАЗНОМ ДВИГАТЕЛЕ
Моторчик взят от бытовой мясорубки. Направление движения нас не устраивало, пришлось его поменять Всю инфо.
Как изменить направление вращения трехфазного асинхронного двигателя?
Разберемся, как просто поменять направление вращения трехфазного двигателя на противоположное.
Вариант 2: переподключение пусковой намотки
Второй способ организовать реверс асинхронного мотора 220 Вольт – поменять местами начало и конец пусковой обмотки. Делается это по аналогии с первым вариантом:
- Из четырех проводов, выходящих из коробки мотора, выясните, какие из них соответствуют отводкам пусковой намотки.
- Изначально конец В пусковой обмотки соединялся с началом С рабочей, а начало А подключалось к пускозарядному конденсатору. Сделать реверс однофазного двигателя можно, подключив емкость к выводу В, а начало С с началом А.

После описанных выше действий получаем схему, как на рисунке выше: точки А и В поменялись местами, значит ротор стал обращаться в противоположную сторону.
Вариант 3: смена пусковой обмотки на рабочую, и наоборот
Организовать реверс однофазного мотора 220В теми способами, что описаны выше, можно только при условии, что из корпуса выходят отводки от обеих обмоток со всеми началами и концами: А, В, С и D. Но часто встречаются моторы, в которых производитель намеренно оставил снаружи только 3 контакта. Этим он обезопасил устройство от различных «самоделок». Но все же выход есть.

На рисунке выше изображена схема такого, «проблемного», мотора. У него выходят из корпуса только три провода. Они помечены коричневым, синим и фиолетовым цветами. Зеленая и красная линии, соответствующие концу В пусковой и началу С рабочей намотки, соединены между собой внутри. Доступ к ним без разборки двигателя мы получить не сможем. Поэтому изменить вращение ротора одним из первых двух вариантов не представляется возможным.
В этом случае поступают так:
- Снимают конденсатор с начального вывода А;
- Подсоединяют его к конечному выводу D;
- От проводов А и D, а также фазы, пускают отводки (можно сделать реверс с использованием ключа).

Посмотрите на рисунок выше. Теперь, если подключить фазу к отводку D, то ротор вращается в одну сторону. Если же фазный провод перекинуть на ветку A, то можно изменить направление вращения в противоположную сторону. Реверс можно осуществлять, вручную разъединяя и соединяя провода. Облегчить работу поможет использование ключа.
Важно! Последний вариант реверсивной схемы подключения асинхронного однофазного мотора неправильный. Его можно использовать, только если соблюдаются условия:
- Длина пусковой и рабочей намоток одинакова;
- Площадь их поперечного сечения соответствует друг другу;
- Эти провода изготовлены из одного и того же материала.
Все эти величины влияют на сопротивление. Оно у обмоток должно быть постоянным. Если вдруг длина или толщина проводов отличаются друг от друга, то после того, как вы организуете реверс, окажется, что сопротивление рабочей намотки станет таким же, как было раньше у пусковой, и наоборот. Это может стать и причиной того, что мотор не сможет запуститься.
Внимание! Даже если длина, толщина и материал обмоток совпадают, работа при измененном направлении вращения ротора не должна быть продолжительной. Это чревато перегревом и выходом из строя двигателя. КПД при этом тоже оставляет желать лучшего.
Осуществить реверс асинхронного мотора 220В просто, если концы обмоток отводятся из корпуса наружу. Сложнее его организовать, когда выводов всего три. Рассмотренный нами третий способ реверсирования подходит только для кратковременного включения двигателя в сеть. Если работа с обратным вращением обещает быть продолжительной, то мы рекомендуем вскрыть коробку для переключения методами, описанными в 1 и 2 варианте: так безопасно для агрегата, и сохраняется КПД.
sis26.ru
Как изменить направление вращения однофазного асинхронного двигателя
 Рис. 1 Схема подключения двигателя однофазного асинхронного двигателя с пусковым конденсатором.
Рис. 1 Схема подключения двигателя однофазного асинхронного двигателя с пусковым конденсатором.
Возьмем за основу уже подключенный однофазный асинхронный двигатель, с направлением вращения по часовой стрелке (рис.1).
На рисунке 1
- точками A, B условно обозначены начало и конец пусковой обмотки, для наглядности к этим точкам подключены провода коричневого и зеленого цвета соответственно.
- точками С, В условно обозначены начало и конец рабочей обмотки, для наглядности к этим точкам подключены провода красного и синего цвета соответственно.
- стрелками указано направление вращения ротора асинхронного двигателя
Изменить направление вращения однофазный асинхронный двигатель в другую сторону – против часовой стрелки. Для этого достаточно переподключить одну из обмоток однофазного асинхронного двигателя – либо рабочую либо пусковую.
Вариант №1
Меняем направление вращения однофазного асинхронного двигателя, путем переподключения рабочей обмотки.
 Рис.2 При таком подключении рабочей обмотки, относительно рис. 1, однофазный асинхронный двигатель будет вращаться в противоположную сторону.
Рис.2 При таком подключении рабочей обмотки, относительно рис. 1, однофазный асинхронный двигатель будет вращаться в противоположную сторону.
Вариант №2
Меняем направление вращения однофазного асинхронного двигателя, путем переподключения пусковой обмотки.
 Рис.3 При таком подключении пусковой обмотки, относительно рис. 1, однофазный асинхронный двигатель будет вращаться в противоположную сторону.
Рис.3 При таком подключении пусковой обмотки, относительно рис. 1, однофазный асинхронный двигатель будет вращаться в противоположную сторону.
Важное замечание.
Такой способ изменить направление вращения однофазного асинхронного двигателя возможен только в том случае, если на двигателе имеется отдельные отводы пусковой и рабочей обмотки.

Рис.4 При таком подключении обмоток двигателя, реверс невозможен.
На рис. 4 изображен довольно распространенный вариант однофазного асинхронного двигателя, у которого концы обмоток В и С, зеленый и красный провод соответственно, соединены внутри корпуса. У такого двигателя три вывода, вместо четырех как на рис. 4 коричневый, фиолетовый, синий провод.
UPD 03/09/2014 Наконец то удалось проверить на практике, не очень правильный, но все же используемый метод смены направления вращения асинхронного двигателя. Для однофазного асинхронного двигателя, который имеет только три вывода, возможно заставить ротор вращаться в обратном направлении, достаточно поменять местами рабочую и пусковую обмотку. Принцип такого включения изображен на рис.5
 Рис. Нестандартный реверс асинхронного двигателя
Рис. Нестандартный реверс асинхронного двигателя
zival.ru
Как уменьшить обороты электродвигателя схемы и описание | ProElectrika.com
егулировка оборотов электродвигателя часто бывает необходима как в производственных, так и каких то бытовых целях. В первом случае для уменьшения или увеличения частоты вращения применяются промышленные регуляторы напряжения – инверторные частотные преобразователи. А с вопросом, как регулировать обороты электродвигателя в домашних условиях, попробуем разобраться подробнее.
Необходимо сразу сказать, что для разных типов однофазных и трехфазных электрических машин должны применяться разные регуляторы мощности. Т.е. для асинхронных машин применение тиристорных регуляторов, являющихся основными для изменения вращения коллекторных двигателей, недопустимо.
Лучший способ уменьшить обороты вашего устройства – не в регулировке частоты вращения самого движка, а посредством редуктора или ременной передачи. При этом сохранится самое главное – мощность устройства.
Немного теории об устройстве и области применения коллекторных электродвигателей
Электродвигатели этого типа могут быть постоянного или переменного тока, с последовательным, параллельным или смешанным возбуждением (для переменного тока применяется только первые два вида возбуждения).

Коллекторный электродвигатель состоит из ротора, статора, коллектора и щеток. Ток в цепи, проходящий через соединенные определенным образом обмотки статора и ротора, создает магнитное поле, заставляющее последний вращаться. Напряжение на ротор передается при помощи щеток из мягкого электропроводного материала, чаще всего это графит или медно-графитовая смесь. Если изменить направление тока в роторе или статоре, вал начнет вращаться в другую сторону, причем это всегда делается с выводами ротора, что бы не происходило перемагничивание сердечников.
При одновременном изменении подключения и ротора и статора реверсирования не произойдет. Существуют также трехфазные коллекторные электродвигатели, но это уже совсем другая история.
Электродвигатели постоянного тока с параллельным возбуждением
Обмотка возбуждения (статорная) в двигателе с параллельным возбуждением состоит из большого количества витков тонкого провода и включена параллельно ротору, сопротивление обмотки которого намного меньше. Поэтому для уменьшения тока во время запуска электродвигателей мощностью более 1 Квт в цепь ротора включают пусковой реостат. Управление оборотами электродвигателя при такой схеме включения производится путем изменения тока только в цепи статора, т.к. способ понижения напряжения на клеммах очень не экономичен и требует применение регулятора большой мощности.
Если нагрузка мала, то при случайном обрыве обмотки статора при использовании такой схемы частота вращения превысит максимально допустимую и электродвигатель может пойти “вразнос”
Электродвигатели постоянного тока с последовательным возбуждением
Обмотка возбуждения такого электродвигателя имеет небольшое число витков толстого провода, и при ее последовательном включении в цепь якоря ток во всей цепи будет одинаков. Электродвигатели этого типа более выносливы при перегрузках и поэтому наиболее часто встречаются в бытовых устройствах.
Регулировка оборотов электродвигателя постоянного тока с последовательно включенной обмоткой статора может производиться двумя способами:
- Подключением параллельно статору регулировочного устройства, изменяющего магнитный поток. Однако этот способ довольно сложен в реализации и не применяется в бытовых устройствах.
- Регулирование (снижение) оборотов с помощью уменьшения напряжения. Этот способ применяется практически во всех электрических устройствах – бытовых приборах, инструменте и т.д.
Электродвигатели коллекторные переменного тока
Эти однофазные моторы имеют меньший КПД, чем двигатели постоянного тока, но из за простоты изготовления и схем управления нашли наиболее широкое применение в бытовой технике и электроинструменте. Их можно назвать “универсальными”, т.к. они способны работать как при переменном, так и при постоянном токе. Это обусловлено тем, что при включении в сеть переменного напряжение направление магнитного поля и тока будет изменяться в статоре и роторе одновременно, не вызывая изменения направления вращения. Реверс таких устройств осуществляется переполюсовкой концов ротора.
Для улучшения характеристик в мощных (промышленных) коллекторных электродвигателях переменного тока применяются дополнительные полюса и компенсационные обмотки. В двигателях бытовых устройств таких приспособлений нет.
Регуляторы оборотов электродвигателя
Схемы изменения частоты вращения электродвигателей в большинстве случаев построены на тиристорных регуляторах, ввиду своей простоты и надежности.

Принцип работы представленной схемы следующий: конденсатор С1 заряжается до напряжения пробоя динистора D1 через переменный резистор R2, динистор пробивается и открывает симистор D2, управляющий нагрузкой. Напряжение на нагрузке зависит от частоты открывания D2, зависящее в свою очередь от положения движка переменного сопротивления. Данная схема не снабжена обратной связью, т.е. при изменении нагрузки обороты также будут меняться и их придется подстраивать. По такой же схеме происходит управление оборотами импортных бытовых пылесосов.
Вот так работает хороший регулятор оборотов двигателя:
Изменение скорости вращения вала двигателя в стиральной машине, например, происходит с задействованием обратной связи от таходатчика, поэтому ее обороты при любой нагрузке постоянны.
proelectrika.com
Управление скоростью вращения однофазных двигателей
Однофазные асинхронные двигатели питаются от обычной сети переменного напряжения 220 В.
Наиболее распространённая конструкция таких двигателей содержит две (или более) обмотки — рабочую и фазосдвигающую. Рабочая питается напрямую, а дополнительная через конденсатор, который сдвигает фазу на 90 градусов, что создаёт вращающееся магнитное поле. Поэтому такие двигатели ещё называют двухфазные или конденсаторные.


Регулировать скорость вращения таких двигателей необходимо, например, для:
- изменения расхода воздуха в системе вентиляции
- регулирования производительности насосов
- изменения скорости движущихся деталей, например в станках, конвеерах
В системах вентиляции это позволяет экономить электроэнергию, снизить уровень акустического шума установки, установить необходимую производительность.
Способы регулирования
Рассматривать механические способы изменения скорости вращения, например редукторы, муфты, шестерёнчатые трансмиссии мы не будем. Также не затронем способ изменения количества полюсов обмоток.
Рассмотрим способы с изменением электрических параметров:
- изменение напряжения питания двигателя
- изменение частоты питающего напряжения
Регулирование напряжением
Регулирование скорости этим способом связано с изменением, так называемого, скольжения двигателя — разностью между скоростью вращения магнитного поля, создаваемого неподвижным статором двигателя и его движущимся ротором:
n1 — скорость вращения магнитного поля
n2 — скорость вращения ротора
При этом обязательно выделяется энергия скольжения — из-за чего сильнее нагреваются обмотки двигателя.
Данный способ имеет небольшой диапазон регулирования, примерно 2:1, а также может осуществляться только вниз — то есть, снижением питающего напряжения.
При регулировании скорости таким способом необходимо устанавливать двигатели завышенной мощности.
Но несмотря на это, этот способ используется довольно часто для двигателей небольшой мощности с вентиляторной нагрузкой.
На практике для этого применяют различные схемы регуляторов.
Автотрансформаторное регулирование напряжения
Автотрансформатор — это обычный трансформатор, но с одной обмоткой и с отводами от части витков. При этом нет гальванической развязки от сети, но она в данном случае и не нужна, поэтому получается экономия из-за отсутствия вторичной обмотки.
![]()
На схеме изображён автотрансформатор T1, переключатель SW1, на который приходят отводы с разным напряжением, и двигатель М1.
Регулировка получается ступенчатой, обычно используют не более 5 ступеней регулирования.
 Преимущества данной схемы:
Преимущества данной схемы:
- неискажённая форма выходного напряжения (чистая синусоида)
- хорошая перегрузочная способность трансформатора
 Недостатки:
Недостатки:
- большая масса и габариты трансформатора (зависят от мощности нагрузочного мотора)
- все недостатки присущие регулировке напряжением
![]()
![]()
Тиристорный регулятор оборотов двигателя
В данной схеме используются ключи — два тиристора, включённых встречно-параллельно (напряжение переменное, поэтому каждый тиристор пропускает свою полуволну напряжения) или симистор.

Схема управления регулирует момент открытия и закрытия тиристоров относительно фазового перехода через ноль, соответственно «отрезается» кусок вначале или, реже в конце волны напряжения.

Таким образом изменяется среднеквадратичное значение напряжения.
Данная схема довольно широко используется для регулирования активной нагрузки — ламп накаливания и всевозможных нагревательных приборов (так называемые диммеры).
Ещё один способ регулирования — пропуск полупериодов волны напряжения, но при частоте в сети 50 Гц для двигателя это будет заметно — шумы и рывки при работе.
Для управления двигателями регуляторы модифицируют из-за особенностей индуктивной нагрузки:
- устанавливают защитные LRC-цепи для защиты силового ключа (конденсаторы, резисторы, дроссели)
- добавляют на выходе конденсатор для корректировки формы волны напряжения
- ограничивают минимальную мощность регулирования напряжения — для гарантированного старта двигателя
- используют тиристоры с током в несколько раз превышающим ток электромотора
Достоинства тиристорных регуляторов:
- низкая стоимость
- малая масса и размеры
Недостатки:
- можно использовать для двигателей небольшой мощности
- при работе возможен шум, треск, рывки двигателя
- при использовании симисторов на двигатель попадает постоянное напряжение
- все недостатки регулирования напряжением


Стоит отметить, что в большинстве современных кондиционеров среднего и высшего уровня скорость вентилятора регулируется именно таким способом.
Транзисторный регулятор напряжения
Как называет его сам производитель — электронный автотрансформатор или ШИМ-регулятор.
![]()
Изменение напряжения осуществляется по принципу ШИМ (широтно-импульсная модуляция), а в выходном каскаде используются транзисторы — полевые или биполярные с изолированным затвором (IGBT).
![]()
Выходные транзисторы коммутируются с высокой частотой (около 50 кГц), если при этом изменить ширину импульсов и пауз между ними, то изменится и результирующее напряжение на нагрузке. Чем короче импульс и длиннее паузы между ними, тем меньше в итоге напряжение и подводимая мощность.

Для двигателя, на частоте в несколько десятков кГц, изменение ширины импульсов равносильно изменению напряжения.
Выходной каскад такой же как и у частотного преобразователя, только для одной фазы — диодный выпрямитель и два транзистора вместо шести, а схема управления изменяет выходное напряжение.
Плюсы электронного автотрансформатора:
- Небольшие габариты и масса прибора
- Невысокая стоимость
- Чистая, неискажённая форма выходного тока
- Отсутствует гул на низких оборотах
- Управление сигналом 0-10 Вольт
Слабые стороны:
- Расстояние от прибора до двигателя не более 5 метров (этот недостаток устраняется при использовании дистанционного регулятора)
- Все недостатки регулировки напряжением
Частотное регулирование
Ещё совсем недавно (10 лет назад) частотных регуляторов скорости двигателей на рынке было ограниченное количество, и стоили они довольно дорого. Причина — не было дешёвых силовых высоковольтных транзисторов и модулей.
Но разработки в области твердотельной электроники позволили вывести на рынок силовые IGBT-модули. Как следствие — массовое появление на рынке инверторных кондиционеров, сварочных инверторов, преобразователей частоты.
На данный момент частотное преобразование — основной способ регулирования мощности, производительности, скорости всех устройств и механизмов приводом в которых является электродвигатель.
Однако, преобразователи частоты предназначены для управления трёхфазными электродвигателями.
Однофазные двигатели могут управляться:
- специализированными однофазными ПЧ
- трёхфазными ПЧ с исключением конденсатора
Преобразователи для однофазных двигателей
В настоящее время только один производитель заявляет о серийном выпуске специализированного ПЧ для конденсаторных двигателей — INVERTEK DRIVES.
Это модель Optidrive E2

Для стабильного запуска и работы двигателя используются специальные алгоритмы.
При этом регулировка частоты возможна и вверх, но в ограниченном диапазоне частот, этому мешает конденсатор установленный в цепи фазосдвигающей обмотки, так как его сопротивление напрямую зависит от частоты тока:
f — частота тока
С — ёмкость конденсатора
В выходном каскаде используется мостовая схема с четырьмя выходными IGBT транзисторами:

Optidrive E2 позволяет управлять двигателем без исключения из схемы конденсатора, то есть без изменения конструкции двигателя — в некоторых моделях это сделать довольно сложно.
Преимущества специализированного частотного преобразователя:
- интеллектуальное управление двигателем
- стабильно устойчивая работа двигателя
- огромные возможности современных ПЧ:
- возможность управлять работой двигателя для поддержания определённых характеристик (давления воды, расхода воздуха, скорости при изменяющейся нагрузке)
- многочисленные защиты (двигателя и самого прибора)
- входы для датчиков (цифровые и аналоговые)
- различные выходы
- коммуникационный интерфейс (для управления, мониторинга)
- предустановленные скорости
- ПИД-регулятор
Минусы использования однофазного ПЧ:
- ограниченное управление частотой
- высокая стоимость
Использование ЧП для трёхфазных двигателей

Стандартный частотник имеет на выходе трёхфазное напряжение. При подключении к ему однофазного двигателя из него извлекают конденсатор и соединяют по приведённой ниже схеме:

Геометрическое расположение обмоток друг относительно друга в статоре асинхронного двигателя составляет 90°:

Фазовый сдвиг трёхфазного напряжения -120°, как следствие этого — магнитное поле будет не круговое, а пульсирующее и его уровень будет меньше чем при питании со сдвигом в 90°.
В некоторых конденсаторных двигателях дополнительная обмотка выполняется более тонким проводом и соответственно имеет более высокое сопротивление.
При работе без конденсатора это приведёт к:
- более сильному нагреву обмотки (срок службы сокращается, возможны кз и межвитковые замыкания)
- разному току в обмотках
Многие ПЧ имеют защиту от асимметрии токов в обмотках, при невозможности отключить эту функцию в приборе работа по данной схеме будет невозможна
Преимущества:
- более низкая стоимость по сравнению со специализированными ПЧ
- огромный выбор по мощности и производителям
- более широкий диапазон регулирования частоты
- все преимущества ПЧ (входы/выходы, интеллектуальные алгоритмы работы, коммуникационные интерфейсы)
Недостатки метода:
- необходимость предварительного подбора ПЧ и двигателя для совместной работы
- пульсирующий и пониженный момент
- повышенный нагрев
- отсутствие гарантии при выходе из строя, т.к. трёхфазные ПЧ не предназначены для работы с однофазными двигателями
masterxoloda.ru
Cпособы регулирования скорости асинхронного двигателя
Асинхронные двигатели переменного тока являются самыми применяемыми электродвигателями абсолютно во всех хозяйственных сферах. В их преимуществах отмечается конструктивная простота и небольшая цена. При этом немаловажное значение имеет регулирование скорости асинхронного двигателя. Существующие способы показаны ниже.
Согласно структурной схеме скоростью электродвигателя можно управлять в двух направлениях, то есть изменением величин:
- скорость электромагнитного поля статора;
- скольжение двигателя.

Первый вариант коррекции, используемый для моделей с короткозамкнутым ротором, осуществляется за счет изменения:
- частоты,
- количества полюсных пар,
- напряжения.
В основе второго варианта, применяемого для модификации с фазным ротором, лежат:
- изменение напряжения питания;
- присоединение элемента сопротивления в цепь ротора;
- использование вентильного каскада;
- применение двойного питания.
Вследствие развития силовой преобразовательной техники на текущий момент в широком масштабе изготовляются всевозможные виды частотников, что определило активное применение частотно-регулируемого привода. Рассмотрим наиболее распространённые методы.
Частотное регулирование
Всего десять лет назад в торговой сети регуляторов частоты вращения скорости ЭД было небольшое количество. Причиной тому служило то, что тогда ещё не производились дешёвые силовые высоковольтные транзисторы и модули.
На сегодня частотное преобразование – самый распространённый способ регулирования скорости двигателей. Трёхфазные преобразователи частоты создаются для управления 3-фазными электродвигателями.

Однофазные же двигатели управляются:
- специальными однофазными преобразователями частоты;
- 3-фазными преобразователями частоты с устранением конденсатора.
Схемы регуляторов оборотов асинхронного двигателя
Для двигателей повседневного предназначения легко можно выполнить необходимые расчеты, и своими руками произвести сборку устройства на полупроводниковой микросхеме. Пример схемы регулятора электродвигателя приведён ниже. Такая схема позволяет добиться контроля параметров приводной системы, затрат на техническое обслуживание, снижения потребления электричества наполовину.

Принципиальная схема регулятора оборотов вращения ЭД для повседневных нужд значительно упрощается, если применить так называемый симистор.

Обороты вращения ЭД регулируются с помощью потенциометра, определяющего фазу входного импульсного сигнала, открывающего симистор. На изображении видно, что в качестве ключей применяются два тиристора, подключённых встречно-параллельно. Тиристорный регулятор оборотов ЭД 220 В достаточно часто применяется для регулирования такой нагрузки, как диммеры, вентиляторы и нагревательная техника. От оборотов вращения асинхронного ЭД зависят технические показатели и эффективность работы двигательного оборудования.
Заключение
На технорынке сегодня предлагаются в большом ассортименте регуляторы и частотные преобразователи для асинхронных электродвигателей переменного тока.
Управление способом варьирования частоты на данный момент – самый оптимальный способ, т. к. он позволяет плавно регулировать скорость асинхронного ЭД в широчайшем диапазоне, без значительных потерь и снижения перегрузочных способностей.
Тем не менее, на основе расчёта, можно самостоятельно собрать простое и эффективное устройство с регулированием оборотов вращения однофазных электродвигателей с помощью тиристоров.
electricdoma.ru

Из
большого числа типов электродвигателей переменного тока, применяющихся в
современной электротехнике, наиболее широко распространенным, удобным и
экономичным является двигатель с вращающимся магнитным полем, основанный на
применении трехфазного тока.
Чтобы
понять основную идею, лежащую в основе конструкции этих двигателей, вернемся
снова к опыту, изображенному на рис. 264. Мы видели там, что металлическое кольцо,
помещенное во вращающееся магнитное поле, приходит во вращение в ту же сторону,
в какую вращается поле. Причиной этого вращения является то обстоятельство, что
при вращении поля изменяется магнитный поток через кольцо и при этом в кольце
индуцируются токи, на которые поле действует с уже знакомыми нам силами,
создающими вращающий момент.
При
наличии трехфазного тока, т. е. системы трех токов, сдвинутых по фазе друг
относительно друга на (треть периода), очень легко
получить вращающееся магнитное поле без механического вращения магнита и без
всяких дополнительных устройств. Рис. 351,а показывает, как это осуществляется.
Мы имеем здесь три надетые на железные сердечники катушки, расположенные друг
относительно друга под углом 120°. Через каждую из этих катушек проходит один
из токов системы, составляющей трехфазный ток. В катушках создаются магнитные
поля, направления которых отмечены стрелками . Магнитная индукция же каждого из
этих полей изменяется с течением времени по тому же синусоидальному закону, что
и соответствующий ток (рис. 351,б). Таким образом, магнитное поле в
пространстве между катушками представляет собой результат наложения трех
переменных магнитных полей, которые, с одной стороны, направлены под углом 120°
друг относительно друга, а с другой стороны, смещены по фазе на . Мгновенное
значение результирующей магнитной индукции представляет собой векторную сумму
трех составляющих полей в данный момент времени:
![]() .
.
Если
мы теперь станем искать, как изменяется со временем результирующая магнитная
индукция ,
то расчет показывает, что по модулю магнитная индукция результирующего поля не
изменяется (
сохраняет постоянное значение), но направление вектора равномерно
поворачивается, описывая полный оборот за время одного периода тока.

Рис. 351. Получение вращающегося
магнитного поля при сложении трех синусоидальных полей, направленных под углом
120° друг относительно друга и смещенных по фазе на : а) расположение катушек,
создающих вращающееся поле; б) график изменения индукции полей со временем; в)
результирующая индукция постоянна по модулю и за периода
поворачивается на окружности
Не
входя в подробности расчета, поясним, каким образом сложение трех полей дает постоянное
по модулю вращающееся поле. На рис. 351,б стрелками отмечены значения магнитной
индукции трех полей в момент , когда , в момент , когда , и в момент , когда , а на рис. 351,в
выполнено сложение по правилу параллелограмма магнитных индукций и в эти три
момента, причем направления стрелок и , и , и соответствуют рис. 351,а. Мы видим,
что результирующая магнитная индукция имеет во все три указанных момента
один и тот же модуль, но направление ее поворачивается за каждую треть периода
на одну треть окружности.
Если
в такое вращающееся поле поместить металлическое кольцо (или, еще лучше,
катушку), то в нем будут индуцироваться токи так же, как если бы кольцо
(катушка) вращалось в неподвижном поле. Взаимодействие магнитного поля с этими
токами и создает силы, приводящие во вращение кольцо (катушку). В этом
заключается основная идея трехфазного двигателя с вращающимся полем, впервые
осуществленного М. О. Доливо-Добровольским.
Устройство
такого двигателя ясно из рис. 352. Его неподвижная часть – статор –
представляет собой собранный из листовой стали цилиндр, на внутренней
поверхности которого имеются пазы, параллельные оси цилиндра. В эти пазы
укладываются провода, соединяющиеся между собой по торцовым сторонам статора
так, что они образуют три повернутые друг относительно друга на 120° катушки, о
которых шла речь в предыдущем параграфе. Начала этих катушек 1, 2, 3 и концы их
1″, 2″, 3″ присоединены к шести зажимам, находящимся на щитке, укрепленном на
станине машины. Расположение зажимов показано на рис. 353.

Рис. 352. Трехфазный двигатель
переменного тока в разобранном виде: 1 – статор, 2 – ротор, 3 – подшипниковые
щитки, 4 – вентиляторы, 5 – вентиляционные отверстия

Рис. 353. Расположение зажимов на
щитке двигателя
Внутри
статора помещается вращающаяся часть двигателя – его ротор. Это – также
набранный из отдельных листов стали цилиндр, укрепленный на валу, вместе с
которым он может вращаться в подшипниках, находящихся в боковых щитках (крышках)
двигателя. На краях этого цилиндра имеются вентиляционные лопасти, которые при
вращении ротора создают в двигателе сильную струю воздуха, охлаждающую его. На
цилиндрической поверхности ротора, в пазах, параллельных его оси, расположен
ряд проводов, соединенных кольцами на торцах цилиндра. Такой ротор,
изображенный отдельно на рис. 354, носит название «короткозамкнутого» (иногда
его называют «беличьим колесом»). Он приходит во вращение, когда в пространстве
внутри статора возникает вращающееся магнитное поле.

Рис. 354. Короткозамкнутый ротор
трехфазного двигателя
Вращающееся
поле создается трехфазной системой токов, подводимых к обмоткам статора,
которые могут быть соединены между собой либо звездой (рис. 355), либо
треугольником (рис. 356). В первом случае (§ 170) напряжение на каждой обмотке
в раз
меньше линейного напряжения сети, а во втором – равно ему. Если, например,
напряжение между каждой парой проводов трехфазной сети (линейное напряжение) равно
220 В, то при соединении обмоток треугольником каждая из них находится под
напряжением 220 В, а если они соединены звездой, то каждая обмотка находится
под напряжением 127 В.

Рис. 355. Включение обмоток
статора звездой: а) схема включения двигателя; б) соединение зажимов на щитке.
Зажимы 1″, 2″, 3″ соединены «накоротко» металлическими шинами; к зажимам 1, 2,
3 присоединены провода трехфазной сети

Рис. 356. Включение обмоток
статора треугольником: а) схема включения двигателя; б) соединение зажимов на
щитке. Металлическими шинами соединены зажимы 1 и 3″, 2 и 1″, 3 и 2″; к зажимам
1, 2, 3 присоединены провода трехфазной сети
Таким
образом, если обмотки двигателя рассчитаны на напряжение 127 В, то двигатель
может работать с нормальной мощностью как от сети 220 В при соединении его
обмоток звездой, так и от сети 127 В при соединении его обмоток треугольником. На
табличке, прикрепленной к станине каждого двигателя, указываются поэтому два
напряжения сети, при которых данный двигатель может работать, например 127/220
В или 220/380 В. При включении в сеть с меньшим линейным напряжением обмотки
двигателя соединяют треугольником, а при питании от сети с более высоким
напряжением их соединяют звездой.
Вращающий
момент двигателя создается силами взаимодействия магнитного поля и токов,
индуцируемых им в роторе, а сила этих токов (или соответствующая э. д. с.)
определяется относительной частотой вращения поля по отношению к ротору,
который сам вращается в ту же сторону, что и поле. Поэтому, если бы ротор
вращался с той же частотой, что и поле, то никакого относительного движения их
не было бы. Тогда ротор находился бы в покое относительно поля и в нем не
возникала бы никакая индуцированная э. д. с., т. е. в роторе не было бы тока и
не могли бы возникнуть, силы, приводящие его во вращение. Отсюда ясно, что
двигатель описываемого типа может работать только при частоте вращения ротора,
несколько отличающейся от частоты вращения поля, т. е. от частоты тока. Поэтому
такие двигатели в технике принято называть «асинхронными» (от греческого слова
«синхронос» – совпадающий или согласованный во времени, частица «а» означает
отрицание).
Таким
образом, если поле вращается с частотой , а ротор – с частотой , то вращение
поля относительно ротора происходит с частотой , и именно этой частотой
определяются индуцируемые в роторе э. д. с. и ток.
Величина
![]() называется
называется
в технике «скольжением». Она играет очень важную роль во всех расчетах. Обычно
скольжение выражается в процентах.
Когда
мы включаем в сеть ненагруженный двигатель, то в первые моменты равно или близко
к нулю, частота вращения поля относительно ротора велика и индуцированная в роторе э.
д. с. соответственно также велика – она раз в 20 превосходит ту э. д. с.,
которая возникает в роторе при работе двигателя с нормальной мощностью. Ток в
роторе при этом тоже значительно превосходит нормальный. Двигатель развивает в
момент пуска довольно значительный вращающий момент, и так как инерция его
сравнительно невелика, то частота вращения ротора быстро нарастает и почти
сравнивается с частотой вращения поля, так что относительная частота их
становится почти равной нулю и ток в роторе быстро спадает. Для двигателей
малой и средней мощности кратковременная перегрузка их при пуске не
представляет опасности, при запуске же очень мощных двигателей (десятки и сотни
киловатт) применяются специальные пусковые реостаты, ослабляющие ток в обмотке;
по мере достижения нормальной частоты вращения ротора эти реостаты постепенно
выключают.
По
мере того как возрастает нагрузка двигателя, частота вращения ротора несколько
уменьшается, частота вращения поля относительно ротора возрастает, и вместе с
тем растут ток в роторе и развиваемый двигателем вращающий момент. Однако для
изменения мощности двигателя от нуля до нормального значения требуется очень
небольшое изменение частоты вращения ротора, примерно до 6 % от максимального
значения. Таким образом, асинхронный трехфазный двигатель сохраняет почти
постоянную частоту вращения ротора при очень широких колебаниях нагрузки.
Регулировать эту частоту в принципе возможно, но соответствующие устройства
сложны и неэкономичны и потому на практике применяются очень редко. Если
машины, приводимые в действие двигателем, требуют иной частоты вращения, чем
этот двигатель дает, то предпочитают применять зубчатые или ременные передачи с
различными передаточными числами.
Само
собой разумеется, что при возрастании нагрузки двигателя, т. е. отдаваемой им
механической мощности, должен возрастать не только ток в роторе, но и ток в статоре
для того, чтобы двигатель мог поглощать из сети соответствующую электрическую
мощность. Это осуществляется автоматически вследствие того, что ток в роторе
также создает в окружающем пространстве свое магнитное поле, воздействующее на
обмотки статора и индуцирующее в них некоторую э. д. с. Связь между магнитным
потоком ротора и статора, или, как говорят, «реакция якоря», обусловливает
изменения тока в статоре и обеспечивает согласование электрической мощности,
отбираемой из сети, с механической мощностью, отдаваемой двигателем. Детали
этого процесса довольно сложны, и мы в них входить не будем.
Очень
важно, однако, помнить, что хотя недогруженный двигатель и отбирает от сети
такое количество энергии, которое соответствует совершаемой им работе, но при
недогрузке его, когда ток в статоре падает, это обусловлено возрастанием
индуктивного сопротивления статора, т. е. уменьшением коэффициента мощности (§
163), что портит условия эксплуатации сети в целом. Если, например, для работы
станка достаточно мощности 3 кВт, а мы установим на нем мотор 10 кВт, то данное
предприятие почти не понесет ущерба – мотор все равно возьмет только ту
мощность, которая требуется для его работы, плюс потери в самом двигателе. Но
такой недогруженный мотор имеет большое индуктивное сопротивление и уменьшает
коэффициент мощности сети. Он убыточен с точки зрения народного хозяйства в
целом. Чтобы стимулировать борьбу за повышение коэффициента мощности,
организации, отпускающие потребителям электроэнергию, применяют систему штрафов
за слишком низкий по сравнению с установленной нормой коэффициент мощности и
поощрений за его повышение.
Поэтому
при работе с двигателями необходимо твердо соблюдать следующие правила:
1.
Необходимо всегда подбирать двигатель такой мощности, какую фактически требует
приводимая им в действие машина.
2.
Если нагрузка двигателя не достигает 40 % нормальной, а обмотки статора
включены треугольником, то целесообразно переключить их на звезду. При этом
напряжение на обмотках уменьшается в раз, а намагничивающий ток – почти
в три раза. В тех случаях, когда такое переключение приходится производить
часто, двигатель включают в сеть при помощи перекидного рубильника по схеме,
изображенной на рис. 357. В одном положении рубильника обмотки включены
треугольником, в другом — звездой.

Рис. 357. Схема переключения
обмоток двигателя с треугольника (положение рубильника I, I, I) на звезду
(положение рубильника II, II, II)
Для
того чтобы изменить направление вращения вала двигателя на обратное, необходимо
поменять местами два линейных провода, присоединенных к двигателю. Это легко
осуществить при помощи двухполюсного переключателя, как показано на рис. 358.
Переводя переключатель из положения I-I в положение II-II, мы меняем
направление вращения магнитного поля и вместе с тем направление вращения вала
двигателя.

Рис. 358. Схема включения для
изменения направления вращения трехфазного двигателя
Мы
видели, что при наличии в статоре двигателя трех катушек, смещенных друг
относительно друга на 120°, магнитное поле вращается с частотой тока, т. е.
совершает один оборот за часть секунды, или 3000 оборотов в
минуту. Почти с такой же частотой будет вращаться и вал двигателя. Во многих
случаях такая частота вращения является чрезмерно большой. Чтобы уменьшить ее,
в статоре двигателя размещают не три катушки, а шесть или двенадцать и
соединяют их так, чтобы северные и южные полюсы по окружности статора
чередовались. При этом поле поворачивается за каждый период тока только на
половину или четверть оборота, т. е. вал машины вращается c частотой около 1500 или 750
оборотов в минуту.
Наконец,
еще одно практически важное замечание. При повреждении (пробое) изоляции
станины и кожухи электрических машин и трансформаторов оказываются под
напряжением относительно Земли. Прикосновение к этим частям машин может при
таких условиях быть опасным для людей. Для предупреждения этой опасности следует
при напряжениях свыше 150 В относительно Земли заземлять станины и кожухи
электрических машин и трансформаторов, т. е. надежно соединять их
металлическими проводами или стержнями с Землей. Это выполняется по специальным
правилам, которые необходимо строго соблюдать во избежание несчастных случаев.
- непосредственно от трехфазной сети (в этом случае нужно поменять местами любые два из трех фазных проводов местами);
- электродвигатель питается при помощи конденсатора от однофазной сети (здесь нам нужно отключить вывод конденсатора, который соединяется с одним из проводов, который питает его, а затем переключить на другой);
- электродвигатель питается при помощи трехфазного инвертора (тут лучше довериться инструкции по применению).
Изменение направления вращения в асинхронном двигателе переменой двух фаз в обмотках возможно только для ТРХФАЗНЫХ двигателей (предназначенных для включения в трхфазную сеть)!
Главный принцип изменения направления асинхронного двигателя-это изменение направления вращения
статора поля.
Однофазные асинхронные двигатели имеют несколько принципов создания вращающегося магнитного поля.
Есть однофазные конденсаторные двигатели: одна из двух обмоток включена через фазосмещающий конденсатор: здесь для изменения вращения необходимо изменить направление включения любой из двух обмоток (для этого из двигателя должно выходить 4 провода, т.е. точка соединения обмоток -не должна быть внутри).
Есть однофазные двигатели с коротокозамкнутым витком: здесь направление вращения обуславливается установкой короткозамкнутых витков на полюсах (именно они создают смещение по фазе)-здесь направление вращение не возможно изменить.
Есть однофазные двигатели с рабочей и пусковой обмотками (такие часто ставят на компрессоры холодильников) пусковая включается кратковременно на момент пуска (это производит пускозащитное реле): здесь также возможно изменение вращение изменением включения одной из обмоток (нужно чтобы из двигателя выходили все 4 конца обмоток).
Если концов выходит только три (или пусковая обмотка не работает), то при небольшой мощности -около киловатта-такой двигатель можно пустить в любую сторону, включив рабочую обмотку и резко крутнув вал в нужную сторону.
Если мощность больше-пуск можно осуществить вервкой, намотанной на вал..
Есть другие конструкции асинхронных двигателей и изменение вращения каждой из конструкции надо рассматривать отдельно.
А потому не изменяется вращение электродвигателя при замене двух фаз, что пусковой момент асинхронного двухфазного двигателя с симметричной обмоткой равен нулю. Чтобы изменить вращение асинхронного электродвигателя воспользуйтесь следующим советом-инструкцией:
Изменить вращение асинхронного электродвигателя не так уж и сложно. Главное — хоть немного в этом деле разбираться. Отключите питание, прочитайте инструкцию, поменяйте местами провода и включите заново. Таким образом поменяете вращение. Более подробно можно почитать вот здесь.


У асинхронного двигателя вращение возможно как в одну, так и в другую сторону. А зависит это от того, куда вращается магнитное поле вокруг статора. Есть несколько способов изменить вращения магнитного поля. Одна из них такая. Если трхфазная сеть питает двигатель, то нужно поменять местами два любых фазных провода.
Асинхронный двигатель действительно может менять направление движения. По часовой стрелке или против. В работе иногда это очень помогает. Не хочется на каждую работу покупать двигатель. Главное при работе с заменой направления движения двигателя отключите его от сети.
Такой тип двигателя может вращаться в двух направлениях: по часовой и против часовой стрелки. Существует много способов изменения вращения асинхронного двигателя, можно сделать это одним следующим способом:
Потому что пусковой момент асинхронного двухфазного двигателя с симметричной обмоткой равен нулю.
Обмотка двухфазного асинхронника состоит из двух — пусковой и рабочей, и они создают два магнитных момента, конструктивно смещенных один относительно другого. В пусковой обмотке может стоять конденсатор, он же и обеспечивает сдвиг фазы. Если его переставить в рабочую обмотку, то направление вращения изменится. Только вот рабочая обмотка рассчитана на больший ток. Ведь в цепи пусковой обмотке стоит сопротивление, которое, опять же обеспечивает сдвиг фаз тока нужный для пускового момента. Направление вращения вы таким образом измените, но долго он так не проработает.
Бывалые электрики расскажут вам, что трехфазник (он симметричен) можно запустить шворкой намотав шнур на вал и резко дернув за него. То есть создав пусковой внешний момент.
Асинхронный электродвигатель может быть подключен к сети несколькими способами:
Все манипуляции нужно проводить, конечно, когда электродвигатель отключен от сети.
Могу предложить вам два решения вашего вопроса:
1) что бы поменять направление вращения однофазного асинхронного двигателя, нужно переподключить рабочую обмотку.
2) или переподключить пусковую обмотку.
Асинхронный двигатель действительно может двигаться и по часовой стрелке и против нее. Есть разные способы изменить его вращение. В любом случае для начала нужно отключить его от питания. Важно знать, что способ подключения никак не влияет на направление вращения, так что в этом плане ничего менять не нужно. В случае, если питание идет непосредственно от трехфазной сети, нужно поменять местами два из трех идущих к нему фазных провода, причем любые. Если питание идет через трехфазный инвертор, тогда изменить направление поможет инструкция к самому прибору. В других условиях все немного сложнее, возможно, подскажут специалисты.
8. Принцип действия и реверс (изменение направления вращения) трехфазного асинхронного двигателя.
На рисунке представлена электромагнитная схема АД с короткозамкнутой обмоткой ротора в разрезе, включающая статор (1), в пазах которого расположены три фазные обмотки статора (2), представленные одним витком. Начала фазных обмоток A, B, C, а концы соответственно X, Y, Z. В цилиндрическом роторе (3) двигателя расположены стержни (4) короткозамкнутых обмоток, замкнутых по торцам ротора пластинами.
При подаче на фазные обмотки статора трехфазного напряжения в витках обмотки статора протекают токи статора iA
, iB
, iC
, создающие вращающееся магнитное поле с частотой вращения n1
. Это поле пересекает стержни короткозамкнутой обмотки ротора и в них индуцируются ЭДС, направление которых определяется по правилу правой руки. ЭДС в стержнях ротора создают токи ротора i2
и магнитное поле ротора, которое вращается с частотой магнитного поля статора. Результирующее магнитное поле АД равно сумме магнитных полей статор и ротора. На проводники с током i2
, расположенные в результирующем магнитном поле, действуют электромагнитные силы, направление которых определяется правилом левой руки. Суммарное усиление Fрез
, приложенное ко всем проводникам ротора, образует вращающий эле5ктромагнитный момент M асинхронного двигателя.
Вращающий электромагнитный момент М, преодолевая момент сопротивления Мс
на валу, принуждает вращаться ротор с частотой n2
. Ротор вращается с ускорением, если момент М больше момента сопротивления Мс
, или с постоянной частотой, если моменты равны.
Частота вращения ротора n2
всегда меньше частоты вращения магнитного поля машины n1
, т. к. только в этом случае возникает вращающий электромагнитный момент. Если частота вращения ротора будет равна частоте вращения МП статора, то ЭМ момент равен нулю (стержни ротора не пересекают МП двигателя, и ток равен нулю). Разница частот вращения МП статора и ротора в относительных единицах называется скольжением двигателя:
s
=
n
1−
n
2.
n
1
Скольжение измеряется в относительных единицах или процентах по отношению к n1
. В рабочем режиме близком к номинальному скольжение двигателя составляет 0.01-0.06. Частота вращения ротораn
2
=
n
1
(1−
s
)
.
Таким образом, характерной особенностью асинхронной машины является наличие скольжения — неравенства частот вращения магнитного поля двигателя и ротора. Поэтому машину называют асинхронной.
При работе асинхронной машины в двигательном режиме частота вращения ротора меньше частоты вращения МП и 0 < s < 1. в этом режиме обмотка статора питается от сети, а вал ротора передает механический момент на исполнительный орган механизма. Электрическая энергия преобразуется в механическую.
Если ротор АД заторможен (s = 1) – это режим короткого замыкания. В случае, если частота вращения ротора совпадает с частотой вращения МП, то вращающий момент двигателя не возникает. Это режим идеального холостого хода.
Чтобы изменить направление вращения ротора (реверсировать двигатель), нужно изменить направление вращения МП. Для реверса двигателя нужно изменить порядок чередования фаз подведенного напряжения, т. е. Переключить две фазы.

9. Схема замещения и механическая характеристика трехфазного асинхронного двигателя.
|
Rн |
||||||||
|
Rн |
||||||||
|
E =E» |
||||||||
В схеме асинхронная машина с электромагнитной связью статорной и роторной цепей заменена эквивалентной приведенной схемой замещения. При этом параметры обмотки ротора R2
и x2
приводятся к обмотке статора при условии равенства E1
= E2
»
. E2
»
, R2
»
, x2
»
– приведенные параметры ротора.
включенное в обмотку неподвижного ротора, т. е. машина имеет активную нагрузку.
Величина этого сопротивления определяется скольжением, а, следовательно, механической нагрузкой на валу двигателя. Если момент сопротивления на валу двигателя Мс
= 0, то скольжение s = 0; при этом величинаR
н
=∞
и I2
»
= 0, что соответствует работе
двигателя в режиме холостого хода.
В режиме холостого хода ток статора равен току намагничивания I
1
=I
0
. Магнитная цепь машины представляется намагничивающим контуром с параметрами x0
, R0
– индуктивное и активное сопротивления намагничивания обмотки статора. Если момент сопротивления на валу двигателя превышает его вращающий момент, то ротор останавливается. При этом величина Rн
= 0, что соответствует режиму короткого замыкания.
Первая схема называется Т-образной схемой замещения АД. Она может быть преобразована в более простой вид. С этой целью намагничивающий контурZ
0
=
R
0
+
jx
0
выносят на общие зажимы. Чтобы при этом намагничивающий ток I
0
не изменял своей величины, в этот контур последовательно включают сопротивления R1
и x1
. В полученной Г- образной схеме замещения сопротивления контуров статора и ротора соединены последовательно. Они образуют рабочий контур, параллельно которому включен намагничивающий контур.
Величина тока в рабочем контуре схемы замещения:
|
I» |
Где U1 |
|||||||||||||||
|
» 1 |
√ |
R» |
||||||||||||||
|
√ |
) +(x |
) +(x |
||||||||||||||
напряжение сети.
Электромагнитный момент АД создается взаимодействием тока в обмотке ротора с вращающимся МП машины. Электромагнитный момент М определяется через электромагнитную мощность:
|
P |
2 |
Угловая частота вращения МП статора. |
|||||||||||
|
P |
m1 |
Т. е. ЭМ момент пропорционален мощности электрических |
|||||||||||
|
ω |
|||||||||||||
|
ω |
|||||||||||||
|
потерь в обмотке ротора. |
|||||||||||||
|
2 R |
|||||||||||||
|
2 |
) +(x |
||||||||||||
Приняв в уравнении число фаз двигателя m1
= 3; x1
+ x2
»
= xк
, исследуем его на экстремум. Для этого приравниваем производную dM / ds к нулю и получаем две экстремальные точки. В этих точках момент Мк
и скольжение sк
называются критическими и соответственно равны:
|
±R |
|||||||
|
√ |
Где «+» при s > 0, “-” при s < 0. |
||||||
|
M к |
3U |
||||||
|
2 |
|||||||
|
R1 |
Зависимость ЭМ момента от скольжения M(s) или от частоты вращения ротора M(n2
) называется механической характеристикой АД.
Если разделить M на Mк
, получим удобную форму записи уравнения механической характеристики АД:
|
2 |
||||||||||||||
|
2asк |
R2 |
|||||||||||||
|
2 |
3 |
R2 |
||||||||||||
|
2 |
||||||||||||||
Чаще всего к нашим домам, участкам, гаражам подведена однофазная сеть 220 В. Потому оборудование и все самоделки делают так, чтобы они работали от этого источника питания. В данной статье рассмотрим, как правлильно сделать подключение однофазного двигателя.
Асинхронный или коллекторный: как отличить
Вообще, отличить тип двигателя можно по пластине — шильдику — на которой написаны его данные и тип. Но это только в том случае, если его не ремонтировали. Ведь под кожухом может быть что угодно. Так что если вы не уверены, лучше определить тип самостоятельно.
Как устроены коллекторные движки
Отличить асинхронный и коллекторный двигатели можно по строению. У коллекторных обязательно есть щетки. Они расположены возле коллектора. Еще обязательный атрибут движка этого типа — наличие медного барабана, разделенного на секции.
Такие двигатели выпускаются только однофазные, они часто устанавливаются в бытовой технике, так как позволяют получить большое число оборотов на старте и после разгона. Также они удобны тем, что легко позволяют менять направление вращения — необходимо только поменять полярность. Несложно также организовать изменение скорости вращения — изменением амплитуды питающего напряжения или угла его отсечки. Потому и используются подобные двигатели в большей части бытовой и строительной техники.

Недостатки колелкторых двигателей — высокая шумность работы на больших оборотах. Вспомните дрель, болгарку, пылесос, стиральную машину и т.д.. Шум при их работе стоит приличный. На малых оборотах коллекторные двигатели не так шумят (стиральная машина), но не все инструменты работают в таком режиме.
Второй неприятный момент — наличие щеток и постоянного трения приводит к необходимости регулярного технического обслуживания. Если токосъемник не чистить, загрязнение графитом (от стирающихся щеток) может привести к тому, что соседние секции в барабане соединятся, мотор попросту перестанет работать.
Асинхронные
Асинхронный двигатель имеет стартер и ротор, может быть одно и трех фазным. В данной статье рассматриваем подключение однофазных двигателей, потому речь пойдет только о них.
Асинхронные двигатели отличаются невысоким уровнем шумов при работе, потому устанавливаются в технике, шум работы которой критичен. Это кондиционеры, сплит-системы, холодильники.

Есть два типа однофазных асинхронных двигателей — бифилярные (с пусковой обмоткой) и конденсаторные. Вся разница состоит в том, что в бифилярных однофазных двигателях пусковая обмотка работает только до разгона мотора. После она выключается специальным устройством — центробежным выключателем или пускозащитным реле (в холодильниках). Это необходимо, так как после разгона она только снижает КПД.
В конденсаторных однофазных двигателях конденсаторная обмотка работает все время. Две обмотки — основная и вспомогательная — смещены относительно друг друга на 90°. Благодаря этому можно менять менять направление вращения. Конденсатор на таких двигателях обычно крепится к корпусу и по этому признаку его несложно опознать.
Более точно определить бифолярный или конденсаторный двигатель перед вами можно при помощи измерений обмоток. Если сопротивление вспомогательной обмотки меньше в два раза (разница может быть еще более значительная), скорее всего, это бифолярный двигатель и эта вспомогательная обмотка пусковая, а значит, в схеме должен присутствовать выключатель или пусковое реле. В конденсаторных двигателях обе обмотки постоянно находятся в работе и подключение однофазного двигателя возможно через обычную кнопку, тумблер, автомат.
Схемы подключения однофазных асинхронных двигателей
С пусковой обмоткой
Для подключения двигателя с пусковой обмоткой потребуется кнопка, у которой один из контактов после включения размыкается. Эти размыкающиеся контакты надо будет подключить к пусковой обмотке. В магазинах есть такая кнопка — это ПНВС. У нее средний контакт замыкается на время удержания, а два крайних остаются в замкнутом состоянии.

Внешний вид кнопки ПНВС и состояние контактов после того как кнопка «пуск» отпущена»
Сначала при помощи измерений определяем какая обмотка рабочая, какая — пусковая. Обычно вывод от мотора имеет три или четыре провода.
Рассмотрим вариант с тремя проводами. В этом случае две обмотки уже объединены, то есть один из проводов — общий. Берем тестер, измеряем сопротивление между всеми тремя парами. Рабочая имеет самое меньшее сопротивление, среднее значение — пусковая обмотка, а наибольшее — это общий выход (меряется сопротивление двух последовательно включенных обмоток).
Если выводов четыре, они звонятся попарно. Находите две пары. Та, в которой сопротивление меньше — рабочая, в которой больше — пусковая. После этого соединяем один провод от пусковой и рабочей обмотки, выводим общий провод. Итого остается три провода (как и в первом варианте):
- один с рабочей обмотки — рабочий;
- с пусковой обмотки;
- общий.
Со всеми этими 
подключение однофазного двигателя
Все три провода подключаем к кнопке. В ней тоже имеется три контакта. Обязательно пусковой провод «сажаем на средний контакт
(который замыкается только на время пуска), остальные два — на крайн
ие (произвольно).
К крайним входным контактам ПНВС подключаем силовой кабель (от 220 В), средний контакт соединяем перемычкой с рабочим (обратите внимание! не с общим
). Вот и вся схема включения однофазного двигателя с пусковой обмоткой (бифолярного) через кнопку.
Конденсаторный
При подключении однофазного конденсаторного двигателя есть варианты: есть три схемы подключения и все с конденсаторами. Без них мотор гудит, но не запускается (если подключить его по схеме, описанной выше).

Первая схема — с конденсатором в цепи питания пусковой обмотки — хорошо запускаются, но при работе мощность выдают далеко не номинальную, а намного ниже. Схема включения с конденсатором в цепи подключения рабочей обмотки дает обратный эффект: не очень хорошие показатели при пуске, но хорошие рабочие характеристики. Соответственно, первую схему используют в устройствах с тяжелым пуском ( , например), а с рабочим конденсором — если нужны хорошие рабочие характеристики.
Схема с двумя конденсаторами
Есть еще третий вариант подключение однофазного двигателя (асинхронного) — установить оба конденсатора. Получается нечто среднее между описанными выше вариантами. Эта схема и реализуется чаще всего. Она на рисунке выше в середине или на фото ниже более детально. При организации данной схемы тоже нужна кнопка типа ПНВС, которая будет подключать конденсатор только не время старта, пока мотор «разгонится». Потом подключенными останутся две обмотки, причем вспомогательная через конденсатор.

Подключение однофазного двигателя: схема с двумя конденсаторами — рабочим и пусковым
При реализации других схем — с одним конденсатором — понадобится обычная кнопка, автомат или тумблер. Там все соединяется просто.
Подбор конденсаторов
Есть довольно сложная формула, по которой можно высчитать требуемую емкость точно, но вполне можно обойтись рекомендациями, которые выведены на основании многих опытов:
- рабочий конденсатор берут из расчета 70-80 мкФ на 1 кВт мощности двигателя;
- пусковой — в 2-3 раза больше.
Рабочее напряжение этих конденсаторов должно быть в 1,5 раза выше, чем напряжение сети, то есть, для сети 220 В берем емкости с рабочим напряжением 330 В и выше. А чтобы пуск проходил проще, в пусковую цепь ищите конденсатор специальный конденсатор. У них в маркировке присутствует слова Start или Starting, но можно взять и обычные.
Изменение направления движения мотора
Если после подключения мотор работает, но вал крутится не в том направлении, которое вам надо, можно поменять это направление. Это делают поменяв обмотки вспомогательной обмотки. Когда собирали схему, один из проводов подали на кнопку, второй соединили с проводом от рабочей обмотки и вывели общий. Вот тут и надо перекинуть проводники.

Для электродвигателя режим работы с периодическим изменением направления вращения (реверсирование) является наиболее благоприятным. По той причине, что ликвидируется паразитное намагничивание, вызывающее перегрев и потерю мощности электрической машиной. Кроме того, схемы реверсивного пуска намного проще, чем механические трансмиссии, состоящие из системы зубчатых шестерней. Наибольшее число вопросов вызывает способ изменения направления вращения двигателей переменного тока, ведь изменить полярность питающего напряжения невозможно. В этой статье мы представим вам основные схемные решения для запуска асинхронных и коллекторных электродвигателей, в которых предусмотрена возможность их реверсирования.
Левые движки
И лишь несколько процентов двигателей по прихоти конструкторов имеют левое вращение – как на фото. Поэтому на фото и наклеена стрелка – это нестандартный случай.

Вывод – если не знаешь, куда должен крутить двигатель – включай его на правое вращение, 90% что не ошибёшься!
Как изменить направление вращения трехфазного асинхронного двигателя
Для электродвигателя режим работы с периодическим изменением направления вращения (реверсирование) является наиболее благоприятным. По той причине, что ликвидируется паразитное намагничивание, вызывающее перегрев и потерю мощности электрической машиной. Кроме того, схемы реверсивного пуска намного проще, чем механические трансмиссии, состоящие из системы зубчатых шестерней. Наибольшее число вопросов вызывает способ изменения направления вращения двигателей переменного тока, ведь изменить полярность питающего напряжения невозможно. В этой статье мы представим вам основные схемные решения для запуска асинхронных и коллекторных электродвигателей, в которых предусмотрена возможность их реверсирования.
Принцип работы
Электрический двигатель представляет собой механизм, в котором вращение осуществляется под воздействием электромагнитных волн. В основу положено всего два компонента:
- ротор;
- статор.
Вращается только первый элемента, а импульс на него подается со второго элемента. Чем выше мощность двигателя, тем больше его габариты. Из всего разнообразия различают:
- коллекторные;
- асинхронные.
В двигателях коллекторного типа питание на ротор подается через угольные щетки, которые касаются ламелей коллектора. Такие двигатели еще называют короткозамкнутыми. В асинхронных двигателях схема действия несколько отличается. В этом случае вращение происходит под воздействием двух сил:
- магнитного поля;
- индукции.
Напряжение от источника питания подается на фиксированные обмотки статора. При этом в нем возникают электромагнитные волны. Если напряжение переменное, тогда магнитное поле нестабильно и имеет определенные колебания. Благодаря этим колебаниям и происходит смещение ротора. Между ротором и статором есть небольшой воздушный зазор, благодаря которому и возможно беспрепятственное смещение. Магнитные волны из обмоток статора воздействуют на обмотки ротора, создавая напряжение. Благодаря такому воздействию возникает электродвижущая сила или ЭДС. Она заставляет магнитные волны взаимодействовать в обратном направлении тем, что есть в статоре, поэтому двигатель и называется асинхронным.
Обратите внимание! Чаще всего асинхронные двигатели имеют трехфазное подключение. Благодаря использованию дополнительных компонентов его можно переделать на работу от сети 220 вольт.
Варианты подключения обмотки
Асинхронный трёхфазный электромотор располагает тремя обмотками – для каждой фазы в отдельности – идущими в пазы статора. Однако для возникновения электродвижущей силы и, как результат, вращения ротора требуется их соединение друг с другом. Вариант подключения конкретного двигателя важно знать. Так как это поможет выбрать верную схему подключения его к сети 220В.
Каждая из трёх обмоток отвечает своей фазе и имеет как начало, так и конец. При этом входы и выходы обозначаются соответствующими буквами и цифрами:
Номенклатура двигателей, выпущенных в период Советского союза:
- Первая фаза С1-С4.
- Вторая фаза С2-С5.
- Третья фаза С3-С6.
Обозначения современных моторов:
- Первая фаза U1-U2.
- Вторая фаза V1-V2.
- Третья фаза W1-W2.

Подключение обмотки трёхфазного двигателя Источник autogear.ru
Существует две основные схемы соединения обмоток в рассматриваемом типе двигателей:
- Звездой.
Все выходы обмоток соединены в одну точку, а входы, соответственно, к фазам. Схематическое изображение такого способа внешне напоминает звезду. При таком способе к каждой отдельной жиле прилагается фаза 220В, а двум последовательным – линейное 380В.
Главный плюс такой схемы – приложение линейного тока одновременно к двум жилам, что значительно снижает пусковые токи и позволят ротору выполнять мягкий старт. Минусом является меньшая мощность из-за слабых токов в обмотке.
- Треугольником.
Вход предыдущей обмотки соединяется с выходом последующей – и так по кругу. В результате схема напоминает треугольник. При линейном напряжении, равном 380В, токи в обмотке будут достигать существенно большего значения, чем в выше приведённом варианте. Это даст возможность проявить мотору существенно большее значение силы. Недостаток схемы – более сильные пусковые токи, способны привести к перегрузке сети.

Схема «треугольник» Источник ytimg.com
Полезно знать! Чтобы получить преимущества первой и избежать недостатков второй схемы, подключение электродвигателя 380 В и последующий его разгон осуществляют на «звезде», а затем его автоматически переключают на «треугольник».
С чего обязательно следует начинать подключение двигателя: 2 важных момента, проверенные временем
Перед первым включением любого электродвигателя необходимо уточнить его устройство: конструкцию статора и ротора, состояние подшипников.

На собственном и чужом опыте могу заверить, что проще раскрутить несколько гаек, осмотреть внутреннюю конструкцию, выявить дефекты на начальном этапе и устранить их, чем после запуска в непродолжительную работу заниматься сложным ремонтом, который можно было предотвратить.
Важное предупреждение
Начинающие электрики довольно часто сами создают неисправности двигателя, нарушая технологию его разборки, работая обычным молотком: разбивают грани вала.
Для сохранения структуры деталей без их повреждения необходимо использовать специальный съемник подшипников электродвигателя.

В самом крайнем случае, когда его нет, удары молотком наносят через толстые пластины из мягкого металла (медь, алюминий) или плотную сухую древесину (яблоня, груша, дуб).
Как состояние подшипников влияет на работу двигателя
Любой асинхронный электродвигатель (АД) имеет ротор с короткозамкнутыми обмотками. В них наводится ток, создающий магнитный поток, взаимодействующий с вращающимся магнитным полем статора, которое и является его источником движения.
Ротор внутри корпуса крепится на подшипниках. Их состояние сильно влияет на качество вращения. Они призваны обеспечить легкое скольжение вала без люфтов и биений. Любые нарушения недопустимы.
Дело в том, что обмотку статора можно рассматривать как обыкновенный электромагнит. Если у ротора разбиты подшипники, то он под действием магнитного поля станет притягиваться, приближаясь к статорной обмотке.
Зазор между вращающейся и стационарной частями очень маленький. Поэтому касания или биения ротора могут задевать, царапать, деформировать статорные обмотки, безвозвратно повреждая их. Ремонт потребует полной перемотки статора, а это весьма сложная работа.
Обязательно разбирайте электродвигатель перед его подключением, тщательно осматривайте всю его внутреннюю конструкцию.
Что надо учитывать в конструкции статорных обмоток и как их подготовить
Домашнему мастеру чаще всего попадают электродвигатели, которые уже где-то поработали, а, возможно, и прошли реконструкцию или перемотку. Никто об этом обычно не заявляет, на шильдиках и бирках информацию не меняют, оставляют прежней. Поэтому рекомендую визуально осмотреть их внутренности.
Статорные катушки у асинхронных двигателей для питания от однофазной и трехфазной сети отличаются количеством обмоток и конструкцией.
Трехфазный электродвигатель имеет три абсолютно одинаковые обмотки, разнесенные по направлению вращения ротора на 120 угловых градусов. Они выполнены из одного провода с одинаковым числом витков.
Все они имеют равное активное и индуктивное сопротивление, занимают одинаковое число пазов внутри статора.
Это позволяет первоначально оценивать их состояние обычным цифровым мультиметром в режиме омметра при отключенном напряжении.
Однофазный асинхронный двигатель имеет две разные обмотки на статоре, разнесенные на 90 угловых градусов. Одна из них создана для длительного прохождения тока в номинальном режиме работы и поэтому называется основной, главной либо рабочей.
Для уменьшения нагрева ее делают более толстым проводом, обладающим меньшим электрическим сопротивлением.
Перпендикулярно ей смонтирована вторая обмотка большего сопротивления и меньшего диаметра, что позволяет различать ее визуально. Она создана для кратковременного протекания пусковых токов и отключается сразу при наборе ротором номинального числа оборотов.
Пусковая или вспомогательная обмотка занимает примерно 1/3 пазов статора, а остальная часть отведена рабочим виткам.
Однако, приведенное правило имеет исключения: на практике встречаются однофазные электродвигатели с двумя одинаковыми обмотками.
Для подключения статора к питающей сети концы обмоток выводят наружу проводами. С учетом того, что одна обмотка имеет два конца, то у трехфазного электродвигателя может быть, как правило, шесть выводов, а у однофазного — четыре.
Но из этого простого правила встречаются исключения, связанные с внутренней коммутацией выводов для упрощения монтажа на специальном оборудовании:
- у трехфазных двигателей из статора могут выводиться:
- три жилы при внутренней сборке схемы треугольника;
- или четыре — для звезды;
- однофазный электродвигатель может иметь:
- три вывода при внутреннем объединении одного конца пусковой и рабочей обмоток;
- или шесть концов для конструкции с пусковой обмоткой и встроенным контактом ее отключения от центробежного регулятора.
Техническое состояние изоляции обмоток
Где и в каких условиях хранился статор не всегда известно. Если он находился без защиты от атмосферных осадков или внутри влажных помещений, то его изоляция требует сушки.
В домашней обстановке разобранный статор можно поместить в сухую комнату для просушки. Ускорить процесс допустимо обдувом вентилятора или нагревом обычными лампами накаливания.

Обращайте внимание, чтобы разогретое стекло лампы не касалось провода обмоток, обеспечивайте воздушный зазор. Окончание процесса сушки связано с восстановлением свойств изоляции. Этот процесс необходимо контролировать замерами мегаомметром.
Реверс трехфазных асинхронных машин
Направление движения вращающегося магнитного поля асинхронных электродвигателей зависит от порядка подачи фаз, независимо от того как соединены его статорные обмотки – звездой или треугольником. Например, если фазы A, B, C подать на входные клеммы 1, 2 и 3 соответственно, то вращение пойдет (предположим) по часовой стрелке, а если на клеммы 2, 1, и 3, то против нее. Схема подключения через магнитный пускатель избавит вас от необходимости откручивать гайки в клеммной коробке и производить физическую перестановку проводов.
Трехфазные асинхронные машины на 380 вольт принято подключать магнитным пускателем, в котором три контакта находятся на одной раме и замыкаются одновременно, подчиняясь действию так называемой втягивающей катушки – магнитного соленоида, работающего как от 380, так и от 220 вольт. Это избавляет оператора от близкого контакта с токоведущими частями, что при токах свыше 20 ампер может быть небезопасно.
Для реверсивного пуска используется пара пускателей. Клеммы питающего напряжения на входе соединяются по прямой схеме: 1–1, 2–2, 3–3. А на выходе встречно: 4–5, 5–4, 6–6. Чтобы избежать короткого замыкания при случайном одновременном нажатии двух кнопок «Пуск» на пульте управления, напряжение на втягивающие катушки подается через дополнительные контакты противоположных пускателей. Так, чтобы при замкнутой основной группе контактов линия, которая идет на соленоид соседнего прибора, была разомкнута.
На пульте управления устанавливается трехкнопочный пост с однопозиционными – одно действие за одно нажатие – кнопками: одна «Стоп» и две «Пуск». Разводка проводов в нем следующая:
- один фазный провод подается на кнопку «Стоп» (она всегда нормально замкнута) и перемычками с нее на кнопки «Пуск», которые всегда нормально разомкнуты.
- С кнопки «Стоп» два провода на дополнительные контакты пускателей, которые при их срабатывании замыкаются. Так обеспечивается блокировка.
- С кнопок «Пуск» перекрестно по одному проводу на дополнительные контакты пускателей, которые при их срабатывании размыкаются.
Подробнее о схемах подключения магнитных пускателей для трехфазных электродвигателей читайте здесь.
Постановка задачи
Представим, что у уже подсоединенного с внедрением пускозарядной емкости асинхронного однофазового мотора вначале вращение вала ориентировано по часовой стрелке, как на картинке ниже.
Уточним принципиальные моменты:
- Точкой А отмечено начало пусковой обмотки, а точкой В – ее окончание. К исходной клемме A подсоединен провод кофейного, а к конечной – зеленоватого цвета.
- Точкой С помечено начало рабочей обмотки, а точкой D – ее окончание. К исходному контакту подсоединен провод красноватого, а к конечному – голубого цвета.
- Направление вращения ротора обозначено при помощи стрелок.
Разница между прямым и реверсивным пускателями
Главное отличие нереверсивного и реверсивного пусковых устройств, состоит в схеме подключения. Также меняется комплектация. Контактор прямого типа является одиночным, тогда как реверсивный – блочным, состоящим из двух прямых, объединенных в одном корпусе. Визуальные отличия этих двух реле можно видеть на сравнении моделей ПМЛ-1100 (слева) и ПМЛ-1500 (справа):

При этом, должно соблюдаться одно крайне важное условие: реверсивное соединение пускателей должно полностью исключать возможность их одновременного срабатывания. Это неизбежно приведет к возникновению явления короткого замыкания.
Схема подключения реверсивного магнитного пускателя электродвигателей делится на два основных вида:
- Подключение к сети с напряжением 220 В,
- Запуск контактора на 380 В.
Далее рассмотрим подробнее каждый из вариантов, опираясь на уже упомянутые модели контакторов ПМЛ серии 1500.
Способы изменения оборотов двигателя
Регулировка оборотов любого трехфазного электродвигателя, используемого в подъемно-транспортной технике и оборудовании, позволяет добиться требуемых режимов работы точно и плавно, что далеко не всегда возможно, например, за счет механических редукторов. На практике используется семь основных методов коррекции скорости вращения, которые делятся на два ключевых направления:
- Изменение скорости магнитного поля в статоре. Достигается за счет частотного регулирования, переключения числа полюсных пар или коррекции напряжения. Следует добавить, что эти методы применимы для электродвигателей с короткозамкнутым ротором;
- Изменение величины скольжения. Этот параметр можно откорректировать за счет питающего напряжения, подключения дополнительного сопротивления в электрическую цепь ротора, применения вентильного каскада или двойного питания. Используется для моделей с фазным ротором.
Наиболее востребованными методами являются регулирование напряжения и частоты (за счет применения преобразователей), а также изменение количества полюсных пар (реализуется путем организации дополнительной обмотки с возможностью переключения).
Основные неисправности
Искрение, возникающее между щетками и коллектором – самый главный вопрос, требующий внимания. Чтобы избежать неисправностей более серьезных, таких как их отслаивание и деформация или перегрев ламелей, сработавшуюся щетку необходимо заменить.
Помимо этого, возможно замыкание между обмотками якоря и статора, вызывающее сильное искрение на переходе коллектор-щетка или значительное падение магнитного поля.
Чтобы продлить срок службы двигателя, необходимо соблюдение двух условий – профессиональный изготовитель и грамотный пользователь, т.е. строгое соблюдение режима работы.
Видео: Коллекторный электрический двигатель
Мы вновь возвращаемся в мир занимательного — как электротехника, так как считаю, что эти знания нам просто всем необходимы в нашей повседневной жизни.
Реверс однофазных синхронных машин
Для запуска этим моторам необходима вторая обмотка на статоре, в цепь которой включен фазосдвигающий элемент, обычно бумажный конденсатор. Реверсировать можно только те, у которых обе статорных обмотки равнозначны – по диаметру провода, числу витков, а также при условии, что одна из них не отключается после набора оборотов.
Суть схемы реверсирования в том, что фазосдвигающий конденсатор будет подключаться то к одной из обмоток, то к другой. Для примера рассмотрим асинхронный однофазный двигатель АИРЕ 80С2 мощностью 2,2 кВт.

В его клеммной коробке шесть резьбовых выводов, обозначенных литерами с цифрами W2 и W1, U1 и U2, V1 и V2. Чтобы двигатель вращался по часовой стрелке, коммутация производится следующим образом:
- Сетевое напряжение подается на клеммы W2 и V1.
- Концы одной обмотки соединяются с клеммами U1 и U2. Чтобы ее запитать, они соединяются перемычками по схеме U1–W2 и U2–V1.
- Концы второй обмотки подключают к клеммам W2 и V2.
- Фазосдвигающий конденсатор подключают к клеммам V1 и V2.
- Клемма W1 остается свободной.
Чтобы вращение происходило против часовой стрелки, изменяют положение перемычек, они ставятся по схеме W2–U2 и U1– W1. Схема автоматического реверса строится так же на двух магнитных пускателях и трех кнопках – двух нормально разомкнутых «Пуск» и одной нормально замкнутой «Стоп».
Подписка на рассылку
Чтобы механизмы на производстве или в быту, будь-то дерево или металлообрабатывающие станки, консольный насос, конвейерная лента, кран-балка, заточной станок, электрическая газонокосилка, кормоизмельчитель или другое устройство работали без поломок, необходимо, в первую очередь, чтобы вал электродвигателя вращался в правильную сторону.
Во избежание ошибок и не допуска вращения вала механизма в противоположную сторону согласно пункту 2.5.3 «Правил технической эксплуатации электроустановок потребителей» на корпусе самого механизма и приводном двигателе должны быть нанесены стрелки направления вращения электродвигателя.
Направление вращения вала электродвигателя

Правостороннее вращение

Для однофазных двигателей с короткозамкнутым ротором вращение вала по часовой стрелке будет выполняться при условии, когда фаза будет подаваться на конец рабочей обмотки.
Изменение направления вращения вала в трехфазных электродвигателях
Эксплуатация некоторых механизмов требует левостороннего вращения вала. Зная, как изменить направление вращения электродвигателя, это можно сделать без какой-либо доработки или переделки самого приводного двигателя. Для смены направления движения нужно:
- обесточить электродвигатель;
- снять крышку клеммной коробки;
- переставить жилы силового кабеля в соответствие со схемой изображенной на рис. 3: жилу с изоляцией черного цвета (L3) переподключить на контакт V1 в клеммной коробке, а жилу коричневого цвета (L2) на контакт W1.


Если эксплуатация двигателя требует постоянного переключения двигателя с правостороннего вращения на левостороннее, его подключение осуществляют по специальной схеме,
Вариант 1 переподключение рабочей намотки
Чтоб изменить направление вращения мотора, можно только поменять местами начало и конец рабочей (неизменной включенной) обмотки, как это показано на рисунке. Можно поразмыслить, что для этого придется вскрывать корпус, доставать намотку и крутить ее. Этого делать не надо, так как довольно поработать с контактами снаружи:
- Из корпуса должны выходить четыре провода. 2 из их соответствуют началам рабочей и пусковой намоток, а 2 – их концам. Обусловьте, какая пара принадлежит только рабочей обмотке.
- Вы увидите, что к этой паре подсоединены две полосы: фаза и ноль. При отключенном движке произведите реверс методом перекидывания фазы с исходного контакта намотки на конечный, а нуля – с конечного на исходный. Либо напротив.

В итоге получаем схему, где точки С и D изменяются меж собой местами. Сейчас ротор асинхронного мотора будет крутиться в другую сторону.
Моторчик взят от бытовой мясорубки. Направление
движения нас не устраивало, пришлось его поменять Всю инфо.
https://youtube.com/watch?v=G2dSHjv4B00
Постановка задачи
Предположим, что у уже подсоединенного с использованием пускозарядной емкости асинхронного однофазного двигателя изначально вращение вала направлено по часовой стрелке, как на картинке ниже.

Уточним важные моменты:
- Точкой А отмечено начало пусковой обмотки, а точкой В – ее окончание. К начальной клемме A подсоединен провод коричневого, а к конечной – зеленого цвета.
- Точкой С помечено начало рабочей обмотки, а точкой D – ее окончание. К начальному контакту подсоединен провод красного, а к конечному – синего цвета.
- Направление вращения ротора обозначено с помощью стрелок.
Ставим перед собой задачу – сделать реверс однофазного двигателя без вскрытия его корпуса так, чтобы ротор начал вращаться в другую сторону (в данном примере против движения стрелки часов). Ее можно решить тремя способами. Рассмотрим их подробнее.
Коротко о главном
Подключить электродвигатель 380 на 220 вольт можно 4-мя основными способами:
- С конденсатором.
- Без конденсатора.
- С реверсом.
- По схеме «звезда-треугольник».
Прежде чем начать работы по подключению, необходимо определить и удостовериться, каким образом соединена обмотка в клеммной коробке, а также узнать необходимые характеристики из технической таблицы. Выполнять электротехнические работы можно при наличии опыта, но лучше доверить её профессионалам с соответствующим допуском.
Прочитать позже
Отправим материал на почту
Онлайн расчет емкости конденсатора мотора
Введите данные для расчёта конденсаторов — мощность двигателя и его КПД
Есть специальная формула, по которой можно высчитать требуемую емкость точно, но вполне можно обойтись онлайн калькулятором или рекомендациями, которые выведены на основании многих опытов:
Рабочий конденсатор берут из расчета 0,8 мкФ на 1 кВт мощности двигателя; Пусковой подбирается в 2-3 раза больше.
Конденсаторы должны быть неполярными, то есть не электролитическими. Рабочее напряжение этих конденсаторов должно быть минимум в 1,5 раза выше, чем напряжение сети, то есть, для сети 220 В берем емкости с рабочим напряжением 350 В и выше. А чтобы пуск проходил проще, в пусковую цепь ищите специальный конденсатор. У них в маркировке присутствует слова Start или Starting.
Пусковые конденсаторы для моторов
Эти конденсаторы можно подбирать методом от меньшего к большему. Так подобрав среднюю емкость, можно постепенно добавлять и следить за режимом работы двигателя, чтобы он не перегревался и имел достаточно мощности на валу. Также и пусковой конденсатор подбирают добавляя, пока он не будет запускаться плавно без задержек.
При нормальной работе трехфазных асинхронных электродвигателей с конденсаторным пуском, включенных в однофазную сеть предполагается изменение (уменьшение) емкости конденсатора с увеличением частоты вращения вала. В момент пуска асинхронных двигателей (особенно, с нагрузкой на валу) в сети 220 В требуется повышенная емкость фазосдвигающего конденсатора.
Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующий стандарт:
ГОСТ 23851-79 Двигатели газотурбинные авиационные. Термины и определения
Примечание — При пользовании настоящим стандартом целесообразно проверить действие ссылочных стандартов в информационной системе общего пользования — на официальном сайте национального органа Российской Федерации по стандартизации в сети Интернет или по ежегодно издаваемому информационному указателю «Национальные стандарты», опубликованном по состоянию на 1 января текущего года, и по соответствующим ежемесячно издаваемым информационным указателям, опубликованным в текущем году. Если ссылочный документ заменен (изменен), то при пользовании настоящим стандартом следует руководствоваться заменяющим (измененным) документом. Если ссылочный документ отменен без замены, то положение, в котором дана ссылка на него, применяется в части, не затрагивающей эту ссылку.