Активная
мощность Р = 3UIа
синхронного генератора, подключенного
к системе большой мощности (U
= const),
регулируется мощностью первичного
двигателя Рмех
= ωрМд.
При увеличении мощности первичного
двигателя, т. е. вращающего момента
первичного двигателя Мд
(паровой или гидравлической турбины),
увеличивается активная составляющая
тока генератора Iа
(Мд),
одновременно с этим увеличивается и
угол | θ |, что понижает запас устойчивости
π/2 — | θ | генератора. Для того чтобы
синхронный генератор не терял запаса
устойчивости при увеличении активной
мощности, необходимо увеличивать ток
возбуждения. Промышленные синхронные
генераторы электрической энергии
снабжены специальной регулирующей
аппаратурой, с помощью которой при
изменении активной мощности генератора
обеспечивается требуемый запас
устойчивости.
Реактивная
мощность синхронного генератора Q
=
3UI
sin
φ, подключенного к системе большой
мощности (U
= const),
при постоянной активной мощности Р
=
const
регулируется изменением тока возбуждения
Iв.
Если значение тока возбуждения равно
Iв.гр
(P),
то
реактивная мощность синхронного
генератора равна нулю. При значениях
тока возбуждения Iв
> Iв,
гр
(I„
<Iв,
гр)
реактивная мощность синхронного
генератора имеет индуктивный характер;
QL
=
= 3UIpL
(емкостный
характер: Qc
= 3UIpC).
Обычно режим
возбуждения синхронных генераторов
соответствует индуктивной реактивной
мощности, необходимой для работы
асинхронных двигателей.
15.12. Включение синхронного генератора на параллельную работу с системой
Включение синхронного
генератора на параллельную работу с
системой связано с рядом трудностей.
Применяются два способа такого включения:
точная синхронизация и самосинхронизация.
Рассмотрим способ точной синхронизации.
При
включении на параллельную работу с
системой (рис. 15.13) синхронного генератора
способом точной синхронизации мгновенное
значение фазной ЭДС генератора, например
еА1,
должно
быть равно и соответствовать по
направлению в любой момент времени
мгновенному значению соответствующего
напряжения фазы системы еА.
Из
этого требования вытекают следующие
условия включения: ЭДС фазы включаемого
генератора должна иметь одинаковое
действующее значение с фазным напряжением
системы, частоту, равную частоте системы,
фазу, соответствующую фазе фазного
напряжения системы, наконец, чередование
фаз генератора должно соответствовать
чередованию фаз системы. Предварительное
синхронизирование. включаемого генератора
осуществляется следующим образом. Ротор
генератора доводится примерно до
синхронной угловой скорости, и его
возбуждение регулируется так, чтобы
вольтметр на выводах машины показал
значение, равное напряжению сети. При
этом последовательность фаз генератора
должна соответствовать последовательности
фаз системы. Однако перед включением
на параллельную работу необходимо более
точное регулирование частоты машины и
в особенности ее фазной ЭДС. В качестве
указателей для такого точного регулирования
служат синхроноскопы.
В
простейшем виде сонхроноскоп составляется
из ламп накаливания, часто называемых
в таких случаях фазоиндикаторными
лампами.
Н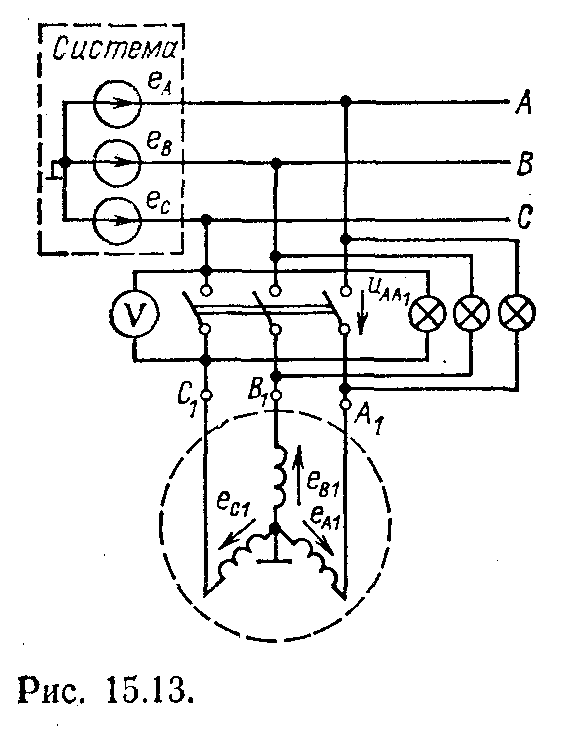 а
а
рис. 15.13 эти лампы включены между шинами
системы и одноименными(А
—
А1,
В —
В1,
С —
С1)
в
отношении последовательности фаз
выводами генератора («включение на
потухание»).
На
рис. 15.14 показаны кривые мгновенных
значений фазного напряжения иА
= еА
системы,
фазной ЭДС еА1
включаемого
на параллельную работу генератора и
результирующего напряжения иАА1
=
—
еA
—
eA1—
Пока
нет точного совпадения частоты генератора
и системы в контуре включаемого
генератора, действующее значение
результирующего напряжения между
контактами выключателя будет то снижаться
до нуля, то повышаться до двойного
значения фазного напряжения системы,
в результате чего лампы будут то гаснуть,
то вновь загораться. Чем больше частота
генератора будет приближаться к частоте
системы, тем медленнее будут происходить
колебания света фазоиндикаторных ламп;
они будут загораться и гаснуть на
относительно длительные сроки. Нужно
достичь возможно более точного совпадения
частот, при котором промежутки времени
между следующими друг за другом вспышками
ламп будут достаточно велики (не менее
3—5 с), после чего в момент полного
потухания ламп замкнуть рубильник.
С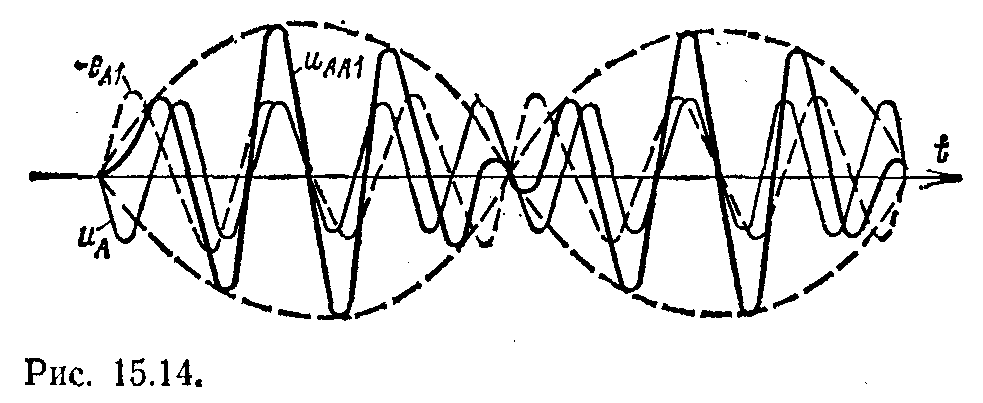 ущность
ущность
методасамосинхронизации
состоит
в том, что генератор включается на сеть
без возбуждения, когда его частота
вращения отличается от синхронной на
2—3 %. Обмотка ротора (обмотка возбуждения)
во время такого включения должна быть
замкнута на некоторый резистор или
накоротко. После включения генератора
обмотка ротора подключается к источнику
постоянного тока возбуждения и генератор
синхронизируется под действием
электромагнитных сил.
Так
как в момент включения частота вращения
генератора не равна синхронной и он не
возбужден, то возникает скачок тока в
обмотке статора; значение этого
кратковременного тока может в несколько
раз превышать номинальный ток генератора.
Но, как показывает опыт, ни этот ток,
ни возникающие при этом механические
усилия на валу генератора не опасны для
агрегата (турбогенератора или
гидрогенератора). Метод самосинхронизации
применяется для генераторов мощностью
до 50 MB-А.
После включения
генератора на параллельную работу с
системой большой мощности при всяком
случайном отклонении от синхронного
вращения в обмотке статора генератора
возникают дополнительные токи. Их
взаимодействие с магнитным полем ротора
создает дополнительные силы,
восстанавливающие синхронное вращение.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
DOI: 10.32743/UniTech.2021.82.1-3.21-25
АННОТАЦИЯ
Регулирование активной и реактивной мощности генераторов при подключении к сети всегда было важным вопросом исследований электростанций и электрических сетей для эффективного использования энергии и стабильной работы двигателей. В повседневной жизни потребление электроэнергии в жилых домах постоянно меняется (больше ночью и меньше днем; больше летом и зимой, меньше весной и осенью), поэтому для рационального использования ресурсов и улучшения экономики необходимы мониторинг и регулирование активной мощности в реальном времени. В последнее время большинство приборов, подключенных к сети, являются индуктивными. Поэтому система питания должна загружать много реактивной мощности помимо активной. Согласно статистике, реактивная мощность, потребляемая промышленными предприятиями, необходимая асинхронному двигателю в энергосистеме, составляет 60–65 %, 20–25 % силовых трансформаторов и 10 % приходятся на воздушный электрические сети и другого оборудования [2]. Реактивная мощность, поставляемая энергосистемой, распределяется между всеми генераторами, что вызывает проблему того, сколько должен выдерживать каждый генератор и как регулировать реактивную мощность генераторов. В этой статье подробно анализируются методы регулирования активной и реактивной мощности, диапазон регулирования, угловые характеристики мощности и электромагнитное соотношение активной и реактивной мощности.
ABSTRACT
The regulation of active and reactive power of generators when connected to the grid has always been an important issue in the research of power plants and electrical networks for efficient use of energy and stable operation of motors. In everyday life, electricity consumption in residential buildings is constantly changing (more at night and less during the day; more in summer and winter, less in spring and autumn), therefore, real-time monitoring and regulation of active power is necessary for rational use of resources and improving the economy. Most of the loads connected to the mains are inductive lately. Therefore, the power supply system must load a lot of reactive power in addition to active power. According to statistics, the reactive power consumed by industrial enterprises required for an induction motor in the power system is 60–65 %, 20–25 % of power transformers and 10 % for overhead electrical networks and other equipment. The reactive power supplied by the power system is shared among all generators, which raises the problem of how much each generator has to handle and how to regulate the reactive power of the generators. This article analyzes in detail the methods for regulating active and reactive power, the control range, the angular characteristics of power and the electromagnetic ratio of active and reactive power.
Ключевые слова: угол мощности, ток возбуждения, активное регулирование, регулирование реактивной мощности, статическая устойчивость.
Keywords: power angle, excitation current, active regulation, reactive power regulation, static stability.
1. Введение. В этой статье обсуждается, как отрегулировать активную и реактивную мощность после параллельного подключения генератора в основном для бесконечной электросети. Это означает, что изменение режима работы подключаемого генератора практически не может повлиять на изменение напряжения /Ismoilov.files/image001.png) или частоты
или частоты /Ismoilov.files/image002.png) сети, где они остаются неизменными, т.е. = const и = const. Внутренний процесс анализируется с помощью векторной диаграммы или угла мощности при регулировке. Регулировка активной мощности должна изменить входную мощность первичного двигателя для изменения выходной мощности генератора в соответствии с характеристикой угла мощности. Если изменяется только ток возбуждения генератора, можно регулировать только реактивную мощность генератора.
сети, где они остаются неизменными, т.е. = const и = const. Внутренний процесс анализируется с помощью векторной диаграммы или угла мощности при регулировке. Регулировка активной мощности должна изменить входную мощность первичного двигателя для изменения выходной мощности генератора в соответствии с характеристикой угла мощности. Если изменяется только ток возбуждения генератора, можно регулировать только реактивную мощность генератора.
2. При перевозбуждении выдается индуктивная реактивная мощность, а реакцией якоря является размагничивание; при слабом возбуждении генератор производит емкостную реактивную мощность и реакция якоря может усилиться (также может размагничиваться). Обычный генератор возбуждения выдает только активную мощность с коэффициентом мощности, показанным на рис. 1 [2; 8; 6; 7].
2. Регулирование реактивной мощности синхронного генератора и анализ его работы. Предпосылка анализа заключается в том, что в качестве примера берем двигатель со скрытым полюсом. Эффектом насыщения и сопротивлением якоря пренебрегаем. Тогда сеть рассматривается как бесконечная, напряжение – неизменным, а частота – нормальной.
2.1. Выход без нагрузки на стабильную активную мощность. Когда генератор не выдает активную мощность, потребляемую первичным двигателем, просто компенсируются различные потери и не выводятся электромагнитные потери (без учета потерь в меди статора), поэтому угол мощности δ = 0°, электромагнитная мощность /Ismoilov.files/image003.png) = 0, как показано на рис. 1. В это время, хотя электродвижущая сила поля
= 0, как показано на рис. 1. В это время, хотя электродвижущая сила поля /Ismoilov.files/image004.png) , напряжение сети U могут присутствовать и есть токовый выход, это реактивный ток. Когда входная мощность
, напряжение сети U могут присутствовать и есть токовый выход, это реактивный ток. Когда входная мощность /Ismoilov.files/image005.png) первичного двигателя увеличивается, входной крутящий момент
первичного двигателя увеличивается, входной крутящий момент /Ismoilov.files/image006.png) увеличивается и
увеличивается и /Ismoilov.files/image007.png) (
(/Ismoilov.files/image008.png) – крутящий момент без нагрузки). В это время остаточный крутящий момент (
– крутящий момент без нагрузки). В это время остаточный крутящий момент (/Ismoilov.files/image009.png) ) действует на вал двигателя, так что ускорение ротора, главное магнитное поле ротора (
) действует на вал двигателя, так что ускорение ротора, главное магнитное поле ротора (/Ismoilov.files/image010.png) ) и прямая ось d опережают эквивалентное статору синтетическое магнитное поле (
) и прямая ось d опережают эквивалентное статору синтетическое магнитное поле (/Ismoilov.files/image011.png) ). Поскольку магнитное поле ограничено частотой сети, скорость вращения остается синхронной, а соответственно, и электродвижущая фаза. Величина
). Поскольку магнитное поле ограничено частотой сети, скорость вращения остается синхронной, а соответственно, и электродвижущая фаза. Величина /Ismoilov.files/image012.png) опережает вектор напряжения на клеммах генератора
опережает вектор напряжения на клеммах генератора /Ismoilov.files/image013.png) на фазовый угол, поэтому δ > 0°, > 0, генератор выдает активный ток наружу, а электромагнитный момент
на фазовый угол, поэтому δ > 0°, > 0, генератор выдает активный ток наружу, а электромагнитный момент /Ismoilov.files/image014.png) при этом появляется соответствующий к электромагнитному моменту
при этом появляется соответствующий к электромагнитному моменту /Ismoilov.files/image015.png) Когда δ увеличивается так, что соответствующий электромагнитный крутящий момент в точности равен остаточному крутящему моменту (), ротор возвращается к синхронной скорости, и генератор работает стабильно под углом δ, как показано на рисунке 1 (B) и 1 (С) [2; 6].
Когда δ увеличивается так, что соответствующий электромагнитный крутящий момент в точности равен остаточному крутящему моменту (), ротор возвращается к синхронной скорости, и генератор работает стабильно под углом δ, как показано на рисунке 1 (B) и 1 (С) [2; 6].
В это время выходная активная мощность генератора равна:
/Ismoilov.files/image016.png) . (1)
. (1)
Если это явнополюсный синхронный генератор, его угловая характеристика мощности равна:
/Ismoilov.files/image017.png) . (2)
. (2)
Также можно видеть, что угол мощности – это угол между осью магнитного полюса ротора и осью магнитного полюса воздушного зазора в пространстве и угол между электродвижущей силой возбуждения и напряжением U во времени [1–8].
/Ismoilov.files/image018.jpg)
Рисунок 1. Параллельно с бесконечной электросетью синхронный генератор вырабатывает активную мощность от холостого хода до стабильной выходной мощности
2.2. Регулировка активной мощности при статической и стабильной работе синхронного генератора. Активная мощность синхронного генератора, подключенного к системе большой мощности, регулируется мощностью первичного двигателя. При увеличении мощности первичного двигателя, т.е. вращающего момента первичного двигателя (паровой или гидравлической турбины), увеличивается активная составляющая тока генератора, одновременно с этим увеличивается и угол, что понижает запас устойчивости генератора. Для того чтобы синхронный генератор не терял запаса устойчивости при увеличении активной мощности, необходимо увеличивать ток возбуждения.
Векторная диаграмма генератора с невыпадающими полюсами, например, показана на рисунке 2. Текущий ток можно контролировать с помощью:
/Ismoilov.files/image019.png) ; (3)
; (3)
/Ismoilov.files/image020.png) . (4)
. (4)
Объяснение. Из рисунка видно, что по мере изменения активной мощности изменяется угол δ, а затем изменяется угол /Ismoilov.files/image021.png) , изменяется I cos, а также изменяется I sin, то есть изменяется величина реактивной мощности, а также может поменяться характер. В частности, когда активная мощность увеличивается, ток возбуждения не изменяется, а активная мощность
, изменяется I cos, а также изменяется I sin, то есть изменяется величина реактивной мощности, а также может поменяться характер. В частности, когда активная мощность увеличивается, ток возбуждения не изменяется, а активная мощность /Ismoilov.files/image022.png) увеличивается, I cos увеличивается. Тогда
увеличивается, I cos увеличивается. Тогда /Ismoilov.files/image023.png) увеличивается, затем sin
увеличивается, затем sin/Ismoilov.files/image024.png) увеличивается, то есть δ увеличивается и
увеличивается, то есть δ увеличивается и /Ismoilov.files/image025.png) уменьшается, ток якоря I увеличивается, а угол коэффициента мощности уменьшается. Следовательно, угол δ мощности фактически отражает угол кручения синтетического магнитного поля статора, и тем больше электромагнитная мощность и электромагнитный момент . Причина образования δ заключается в том, что существует поперечный ток реакции якоря
уменьшается, ток якоря I увеличивается, а угол коэффициента мощности уменьшается. Следовательно, угол δ мощности фактически отражает угол кручения синтетического магнитного поля статора, и тем больше электромагнитная мощность и электромагнитный момент . Причина образования δ заключается в том, что существует поперечный ток реакции якоря /Ismoilov.files/image026.png) (составляющая тока якоря
(составляющая тока якоря /Ismoilov.files/image027.png) в направлении
в направлении /Ismoilov.files/image028.png) ), поэтому поперечная реакция якоря заключается в том, что магнитодвижущая сила создает электромагнитный момент и выполняет электромеханическое преобразование энергии [2; 7].
), поэтому поперечная реакция якоря заключается в том, что магнитодвижущая сила создает электромагнитный момент и выполняет электромеханическое преобразование энергии [2; 7].
Необходимые условия. Однако входная мощность от первичного двигателя не может быть увеличена без ограничений для увеличения электромагнитной мощности генератора. Для генератора со скрытыми полюсами, когда угол мощности δ достигает 90°, электромагнитная мощность достигает максимального значения /Ismoilov.files/image029.png) . Если входная мощность от первичного двигателя увеличивается, новый баланс не может быть установлен и скорость двигателя будет постоянно увеличиваться и терять шаг и статическую устойчивость [2; 7; 1].
. Если входная мощность от первичного двигателя увеличивается, новый баланс не может быть установлен и скорость двигателя будет постоянно увеличиваться и терять шаг и статическую устойчивость [2; 7; 1].
/Ismoilov.files/image030.jpg)
Рисунок 2. Синхронный генератор поддерживает постоянным ток возбуждения /Ismoilov.files/image031.png) для регулировки активной мощности генератора
для регулировки активной мощности генератора
3. Регулирование реактивной мощности и анализ работы синхронного генератора. Если генератор подключен параллельно к сети в идеальных условиях, указанных выше, при исследовании регулирования реактивной мощности генератора также можно считать, что мощность электросети достаточно велика, а напряжение электросети и частота не изменятся.
3.1. Анализ регулирования тока возбуждения без нагрузки. Когда ток якоря равен нулю, переключатель холостого хода замкнут, как показано на рисунке 3 (A), ток возбуждения является нормальным возбуждением; когда переключатель холостого хода замкнут, генератор не будет генерировать активную или реактивную мощность.
Если выходной сигнал первичного двигателя остается неизменным, ток возбуждения увеличивается, он будет в перевозбужденном состоянии, и генератор будет посылать обратный реактивный ток, чтобы вызвать реакцию размагничивания якоря, как показано на рисунке 3 (B).
Ток возбуждения начинает уменьшаться по сравнению с нормальным возбуждением, он будет в недовозбужденном состоянии, и генератор будет посылать опережающий реактивный ток для генерации реакции намагниченного якоря, как показано на рисунке 3 (C) [2; 8; 6; 7; 1].
/Ismoilov.files/image032.jpg)
Рисунок 3. Фазово-векторная диаграмма регулировки тока возбуждения без нагрузки
3.2. Регулировка реактивной мощности при активной нагрузке. Когда генератор нагружен активной нагрузкой и выходная активная мощность остается неизменной, взаимосвязь между током якоря генератора и током возбуждения также может быть проанализирована с помощью векторной диаграммы электродвижущей силы. Учитывая, что напряжение постоянно, а сопротивление не учитывается.
/Ismoilov.files/image033.png)
/Ismoilov.files/image034.png)
Если /Ismoilov.files/image035.png) тогда:
тогда:
/Ismoilov.files/image036.png)
Когда ток возбуждения регулируется для изменения , ток статора генератора и коэффициент мощности также изменяются соответственно. Из рисунка 3 видно, что векторная диаграмма активного тока I cos постоянная, вектор тока статора в конце траектории представляет собой горизонтальную линию AB, перпендикулярную вектору напряжения . Из формулы (5) /Ismoilov.files/image037.png) и =
и = /Ismoilov.files/image038.png) , изменение вектора в конце и вектор напряжения параллельны прямой линии CD. В соответствии с вышеуказанными условиями на рисунке 4 представлены четыре типичные векторные диаграммы.
, изменение вектора в конце и вектор напряжения параллельны прямой линии CD. В соответствии с вышеуказанными условиями на рисунке 4 представлены четыре типичные векторные диаграммы.
В первом случае нагрузка генератора только активной мощностью, без выхода реактивной мощности, минимальный ток статора для нормального возбуждения /Ismoilov.files/image039.png) и cos = 1.
и cos = 1.
Во втором случае ток возбуждения увеличивается исходя из нормального возбуждения. В это время /Ismoilov.files/image040.png) находится в сверхвозбужденном состоянии. Ток статора (
находится в сверхвозбужденном состоянии. Ток статора (/Ismoilov.files/image041.png) ) ниже напряжения на клеммах.
) ниже напряжения на клеммах.
В третьем случае ток возбуждения уменьшается на основе нормального возбуждения. В это время /Ismoilov.files/image042.png) находится в недовозбужденном состоянии, а ток статора
находится в недовозбужденном состоянии, а ток статора /Ismoilov.files/image043.png) опережает напряжение на клеммах . В дополнение к активной мощности в сеть двигатель также передает в сеть расширенную емкостную реактивную мощность, что означает, что генератор поглощает индуктивную реактивную мощность из сети.
опережает напряжение на клеммах . В дополнение к активной мощности в сеть двигатель также передает в сеть расширенную емкостную реактивную мощность, что означает, что генератор поглощает индуктивную реактивную мощность из сети.
В четвертом случае необходимо дополнительно уменьшить ток возбуждения, электродвижущая сила еще больше уменьшится, угол мощности и ведущий коэффициент мощности cos будут продолжать увеличиваться, чтобы увеличить значение тока статора. Однако это изменение ограничено. Когда ЭДС холостого хода достигает /Ismoilov.files/image044.png) генератор достигнет предельного состояния стабильной работы из-за предела угла мощности
генератор достигнет предельного состояния стабильной работы из-за предела угла мощности /Ismoilov.files/image045.png) < 90°.
< 90°.
Дальнейшее снижение тока возбуждения не сможет работать стабильно, а также потеряет статическую устойчивость.
/Ismoilov.files/image046.jpg)
Рисунок 4. Векторная диаграмма регулировки тока возбуждения при U = constant и /Ismoilov.files/image047.png) = constant
= constant
4. Вывод. Регулирование активной мощности повлияет на изменение реактивной мощности. Когда активная мощность генератора увеличивается, уменьшение реактивной мощности будет вызвано постоянным током возбуждения и напряжением сети.
При регулировке тока возбуждения необходимо изменить реактивную мощность, хотя на значение активной мощности двигателя это не влияет, а ток якоря сначала уменьшается, затем увеличивается.
Если ток возбуждения установлен слишком низким, двигатель может потерять устойчивость и будет вынужден остановиться.
Список литературы:
- Веников В.А. Переходные электромеханические процессы в электрических системах : учебник для электроэнергет. спец. вузов. 4-е изд., перераб. и доп. – М. : Высшая школа, 1985. – 536 с.
- Князевский Б.А., Липкин Б.Ю. Электроснабжение промышленных предприятий : учебник. 2-е изд., перераб. и доп. – М. : Высшая школа, 1979. – 431 с.
- Повышение коэффициента полезного действия в результате изменения магнитодвижущей силы обмоток машин переменного тока / И.К. Исмоилов [и др.] // Проблемы современной науки и образования. – 2019. – № 11-1 (144).
- Проблемы качества электроэнергии в системах электроснабжения / З.З. Туйчиев [и др.] // Проблемы науки. – 2019. – № 10 (46).
- Электрические цепи, содержащие нелинейные элементы, и методы их расчета / Т.К. Жабборов [и др.] // Вестник науки и образования. – 2019. – № 19-2 (73).
- Юрганов А.А. Сравнение российских и зарубежных стабилизаторов режима // Электротехника, энергетика, электроника: сб. докл. науч. конф. – СПб. : СЗПИ, 2000. – С. 30–47.
- Юрганов А.А., Кожевников В.А. Регулирование возбуждения синхронных генераторов. – СПб. : Наука, 1996. – С. 61–88.
- Jicheng Li. Design and application of modern synchronous generator excitation systems / Li Jicheng, Tsinghua University, China. – Hoboken, NJ, USA : Wiley-IEEE Press, 2019.
Страница 33 из 51
Регулирование реактивной мощности синхронной машины, включенной в сеть
Регулирование реактивной мощности в энергосистемах имеет такое же важное значение, как и регулирование активной мощности. Реактивная мощность необходима для создания магнитных полей во многих электротехнических устройствах, работающих в энергосистеме. Регулирование реактивной мощности позволяет повысить перегрузочную способность этих устройств, поддерживать постоянство напряжения в сети, снизить ее перетоки по линиям и тем самым обеспечить устойчивую и экономичную работу энергосистемы.
Вернемся вновь к режиму холостого хода синхронной машины (рис. 5.34, а).
В этом режиме по обмотке возбуждения протекает ток ![]() , соответствующий по характеристике холостого хода напряжению сети
, соответствующий по характеристике холостого хода напряжению сети ![]() . Увеличим ток возбуждения
. Увеличим ток возбуждения ![]() , тогда модуль ЭДС
, тогда модуль ЭДС ![]() возрастет и возникнет ток
возрастет и возникнет ток
![]() .
.

По отношению к напряжению синхронной машины ![]() ток
ток ![]() будет индуктивным, а по отношению к напряжению сети
будет индуктивным, а по отношению к напряжению сети ![]() — емкостным (рис. 5.34, б), поэтому синхронная машина вырабатывает и отдает в сеть реактивную мощность
— емкостным (рис. 5.34, б), поэтому синхронная машина вырабатывает и отдает в сеть реактивную мощность
![]() .
.
При уменьшении тока возбуждения (![]() ) модуль ЭДС
) модуль ЭДС ![]() снижается и фаза тока
снижается и фаза тока ![]() меняется на противоположную (рис. 5.34, в). В этом случае ток
меняется на противоположную (рис. 5.34, в). В этом случае ток ![]() по отношению к напряжению синхронной машины
по отношению к напряжению синхронной машины ![]() является емкостным, а по отношению к напряжению сети
является емкостным, а по отношению к напряжению сети ![]() — индуктивным. Следовательно, сеть является источником реактивной мощности, и синхронная машина ее потребляет.
— индуктивным. Следовательно, сеть является источником реактивной мощности, и синхронная машина ее потребляет.
Таким образом, изменение тока возбуждения синхронной машины обуславливает изменение в обмотке якоря реактивного тока и, следовательно, происходит регулирование реактивной мощности.
Синхронная машина, загруженная только реактивным током и не несущая активной нагрузки, называется синхронным компенсатором.
Регулирование реактивной мощности возможно при работе синхронной машины в режимах генератора и двигателя. Согласно векторным диаграммам (рис. 5.35), в генераторном режиме при увеличении тока возбуждения (рис. 5.35, а) синхронная машина отдает в сеть реактивную мощность, а при уменьшении тока возбуждения (рис. 5.35, б) потребляет из сети реактивную мощность.
Аналогичные явления имеют место и в двигательном режиме (рис. 5.36).

При увеличении тока возбуждения (рис. 5.36, а) синхронный двигатель отдает в сеть реактивную мощность, а при уменьшении (рис. 5.36, б) — потребляет реактивную мощность.
Активная мощность при этом как в двигательном, так и в генераторном режимах, не меняется.
Возможность плавного регулирования реактивной мощности в широких пределах является важным преимуществом синхронных машин перед асинхронными.