Вращающий момент
АД определяется:
Мэм
= СМ
Ф
Iя
Магнитный поток
создаваемый магнитной системой
пропорционален напряжению сети и при
постоянном напряжении сети является
величиной постоянной, а следовательно
вращающий момент пропорционален току
якоря. При увеличении нагрузки на валу
двигателя частота вращения ротора
уменьшается, что приводит к уменьшению
противо-ЭДС и увеличению тока якоря, а
это в свою очередь вызывает увеличение
вращающего момента. Т.о.,
любые изменения нагрузки на валу
двигателя вызывают пропорциональные
изменения вращающего момента.
5. Как производится пуск двигателя постоянного тока?
В
момент пуска двигателя
противо-ЭДС в обмотке якоря равна нулю
и пусковой ток определится
Iп
= U
/ Rя.
Внутреннее
сопротивление обмотки якоря машины
невелико. У двигателей средней и большой
мощности оно имеет величину порядка
десятых-сотых долей Ома. При прямом
включении двигателя в сеть пусковой
ток достигает (10-15)Iн.
Поэтому
прямой пуск двигателя недопустим. Такой
большой пусковой ток опасен для двигателя
и сети. U в сети может значительно
снизиться, кроме того, возникнет
толчок момента, действующего на передачу
и рабочий механизм.
Для ограничения
силы пускового тока последовательно с
обмоткой якоря включают пусковой реостат
Rп
Тогда
ток
Iп
= U/(Rя
+ Rп).
Сопротивление
пускового реостата выбирают т.о., чтобы
сила пускового тока не превышала
номинального значения силы тока якоря
в 2-2,5 раза.
При пуске
двигателя регулировочный реостат в
цепи возбуждения полностью выводится,
чтобы обеспечить максимальное значение
силы тока в цепи возбуждения и магнитного
потока статора, что обеспечивает плавный
пуск двигателя при достаточном вращающем
моменте якоря для преодоления механического
сопротивления.
По мере увеличения
частоты вращения двигателя растет
противодействующая ЭДС якоря, которая
направлена против подведенного
напряжения и ток снижается, поэтому
сопротивление пускового реостата
постепенно уменьшают до нуля. Пусковой
реостат включается на 2-3 с и не рассчитан
на длительное протекание тока.
Двигатели мощностью до 1 кВт имеют
сравнительно большое сопротивление
якоря, поэтому их включают без пусковых
реостатов.
6. Как осуществляется регулирование частоты вращения двигателя постоянного тока с параллельным возбуждением?
Рассмотрим
способы регулирования частоты вращения
двигателя при неизменном тормозном
моменте на валу. Из формулы частоты
вращения
n=(U–Iя*Rя)/СЕ*Ф
видно,
что регулирование
частоты вращения двигателя постоянного
тока можно осуществлять следующими
способами:
1.Изменение
приложенного напряжения:
применяется редко, т.к.
с изменением напряжения изменяется и
магнитный поток машины, а при малых
напряжениях можно размагнитить
машину.
2.
Изменение потока возбуждения Ф:
из
формулы частоты вращения следует, что
частота вращения обратно пропорциональна
магнитному потоку. Пока магнитная
система машины не насыщена, поток можно
считать пропорциональным силе тока
возбуждения Iв.
Следовательно, частоту вращения
двигателя можно регулировать изменением
силы тока возбуждения, для чего в цепь
возбуждения вводится регулировочный
реостат. С увеличением сопротивления
Rв
уменьшается
сила тока возбуждения Iв,
вследствие чего уменьшается поток Ф.
Уменьшение потока возбуждения ведет к
увеличению частоты вращения.Т.о.,
изменением потока возбуждения можно
регулировать частоту вращения
двигателя только в сторону увеличения.
3.
Изменением величины сопротивления цепи
якоря Rя.
При этом способе регулирования, при
Ф=const,
последовательно с обмоткой якоря
включается регулировочный реостат.
Достоинством этого способа является
возможность плавного регулирования
частоты вращения от 0 до номинального
значения, а недостатком большие потери
энергии на регулировочном сопротивлении
т.к. через регулировочный реостат
проходит весь ток якоря.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Принцип действия машины постоянного тока
Хотя в современном электроприводе преобладают машины переменного тока (асинхронные электродвигатели), двигатели постоянного тока все еще используют и не только в предыдущих решениях.
На рисунке ниже приведена простейшая машина постоянного тока:
Схематическое отображение электродвигателя постоянного тока в осевом направлении показано ниже:
Неподвижная часть двигателя постоянного тока называется индуктором или статором. Состоит он из полюсов и круглого стального ярма, к которому крепятся полюса. Главным назначением индуктора является генерация постоянного (основного) магнитного потока машины. Индуктор простейшей машины, отображенный выше, имеет два полюса 1 (ярмо индуктора не показано).
Основной магнитный поток в электродвигателях постоянного тока создается обмоткой возбуждения, которая запитывается постоянным напряжением и располагается на сердечниках полюсов. Магнитный поток «идет» через якорь от северного полюса N к южному полюсу S, а от него через ярмо снова к северному. Ярмо и сердечники полюсов также изготавливаются из ферромагнитных материалов.

Принцип действия двигателя постоянного тока
В примере, представленном выше, известный электромотор управляет движением руки робота при известном напряжении. В данном сценарии, какую максимальную массу может стабильно удерживать робот?

Мнение эксперта
It-Technology, Cпециалист по электроэнергетике и электронике
Задавайте вопросы «Специалисту по модернизации систем энергогенерации»
Измерение момента вращения при помощи датчиков вращения / Статьи и обзоры / Этот подход не применим к определению свободного тока электромотора, так как его значение остается постоянным при любом напряжении. Спрашивайте, я на связи!
Типы регуляторов оборотов с поддержанием мощности: коллекторный и асинхронный двигатели и варианты регулировки • Мир электрики
Генераторный режим двигателя постоянного тока
Величина индуктируемой в проводнике обмотки якоря ЭДС будет равна:
Где: B – магнитная индукция воздушного зазора между якорем и полюсом в месте расположения проводника; l – активная длина проводника с током, то есть это длина, на протяжении которой проводник расположен в магнитном поле; υ – скорость движения проводника в магнитном поле (линейная).
В обоих проводниках из-за симметрии индуктируются одинаковые ЭДС, которые складываются по контуру витка, и поэтому полная ЭДС якоря двигателя постоянного тока будет равна:
Какое освещение Вы предпочитаете
ВстроенноеЛюстра
ЭДС Еа является величиной переменной, так как проводники якорной обмотки попеременно проходят под южным и северным полюсами, в результате чего направление ЭДС в проводниках изменяется. Кривая ЭДС проводника по форме повторяет кривую распределения индукции B вдоль воздушного зазора в зависимости от времени t (рисунок 4 а)).
В двухполюсной машине частота ЭДС f равна скорости вращения якоря n, выраженной в оборотах в секунду: f = n. А вот в общем случае, когда двигатель постоянного тока имеет p пар полюсов с чередующеюся полярностью:
Таким образом, коллекторный узел является механическим выпрямителем, который преобразовывает переменный ток якоря в постоянный ток внешней цепи.
Постоянное напряжение на зажимах якоря генератора будет меньше Еа на величину падения напряжения в сопротивлении обмотки якоря ra:
Поскольку проводники якоря находятся в магнитном поле и через них протекает ток Ia, то на них будут действовать электромагнитные силы (рисунки 1, 2 а)):
Направление этих сил определяют с помощью правила левой руки (рисунок 3 б)). Данные силы и создают электромагнитный вращающий момент, который будет равен:
Здесь Da это диаметр якоря машины. Из рисунков 1-2 а) можно увидеть, что в генераторном режиме данный момент действует против направления вращения якоря и является тормозящим.

Типы регулировки
Существует довольно много вариантов регулировки оборотов. Вот основные из них:
- Блок питания с регулировкой выходного напряжения.
- Заводские устройства регулировки, которые идут изначально с электромотором.
- Регуляторы на кнопочном управлении и стандартные регуляторы, которые просто ограничивают напряжение.
Эти типы регулировки плохи тем, что с уменьшением или увеличением напряжения падает и мощность. В некоторых электроинструментах это допустимо, но, как показывает практика, в большинстве случаев это является неприемлемым из-за сильного падения мощности и, соответственно, КПД.
Все номиналы электроэлементов обозначены на схеме. Это схема после сборки, работает довольно стабильно и обеспечивает плавную регулировку коллекторного двигателя. При уменьшении выходного напряжения мощность не уменьшается, что является весомым плюсом.
При желании можно собрать регулятор оборотов коллекторного двигателя 220 В своими руками. Эта схема собрана на базе симистора ВТА26−600, который предварительно необходимо установить на радиатор, так как при нагрузке этот элемент довольно сильно греется.
К готовой схеме возможно подключить электромотор, мощность которого не превышает 4 кВт.
Она успешно справится с регулировкой таких электроинструментов, как дрель, болгарка, циркулярка, лобзик. При желании можно использовать схему в качестве регулятора мощности ТЭН-ов, обогревателей и в качестве диммера. К минусам можно отнести невозможность регулировки мощности приборов, которые питаются от постоянного тока.

119. Вращающий момент асинхронного двигателя — Асинхронные двигагели — Основы электротехники. ТОЭ — РЗА. Все о реле и релейной защите
На величину вращающего момента асинхронного двигателя большое влияние оказывает сдвиг фаз между током I2 и э. д. с. E2S ротора.
Мнение эксперта
It-Technology, Cпециалист по электроэнергетике и электронике
Задавайте вопросы «Специалисту по модернизации систем энергогенерации»
Плавность хода, шум и момент шагового двигателя при управлении микроконтроллером / Хабр Чтобы увеличить срок службы различных видов двигателей, рекомендуется пользоваться регуляторами оборотов, решающими большое количество проблем. Спрашивайте, я на связи!
7.3: Электромоторы постоянного тока
Регуляторы мощности постоянного тока
Иногда возникает потребность в регулировке оборотов коллекторного двигателя постоянного тока.
Для регулировки оборотов асинхронного двигателя применяются так называемые частотные преобразователи. Эти преобразователи позволяют кардинально менять форму и частоту сигнала. Как правило, такие преобразователи собраны на базе мощных полупроводниковых транзисторов и импульсных модуляторов, а всеми элементами управляет ШИМ-контроллер.
Следует помнить: чем плавней разгон двигателя, тем меньше он испытывает перегрузок. Это касается редукторов, конвейеров, мощных насосов, лифтов. Вот одна схема регулятора оборотов асинхронного двигателя 220 В.
С помощью этой схемы можно регулировать обороты двигателей, мощность которых не превышает 1 тыс. Вт. При сборке этой схемы есть нюансы, которые необходимо учесть:
Из-за значительного нагрева диодный мост и силовые транзисторы необходимо установить на радиатор. Если предполагается подключение двигателя мощностью до 400 Вт, то термодатчик ставить необязательно, а для управления можно использовать опторазвязку.
Чтобы увеличить срок службы различных видов двигателей, рекомендуется пользоваться регуляторами оборотов, решающими большое количество проблем.

>С увеличением нагрузки на валу двигателя увеличивается так же и ток в якоре. Это вызывает увеличение падения напряжения» сопротивлении обмотки якоря и щеточных контактах.
Так как ток возбуждения остается неизменным (машина нерегулируема), то магнитный поток также постоянен. Однако при увеличении тока в якоре увеличивается размагничивающее действие потока реакции якоря и магнитный поток Ф несколько уменьшится. Увеличение Iяrя вызывает уменьшение скорости двигателя, а уменьшение Ф увеличивает скорость. Обычно падение напряжения влияет на изменение скорости в несколько большей степени, чем реакция якоря, так что с увеличением тока в якоре скорость уменьшается. Изменение скорости у двигателя этого типа незначительно и не превышает 5% при изменении нагрузки от нуля до номинальной, т. е. двигатели параллельного возбуждения имеют жесткую скоростную характеристику.
![]()
При неизменном магнитном потоке зависимость момента от тока в якоре представится прямой линией. Но под воздействием
Вращающий момент двигателя реакции якоря с увеличением нагрузки происходит некоторое уменьшение магнитного потока и зависимость момента пойдет несколько ниже прямой линии.
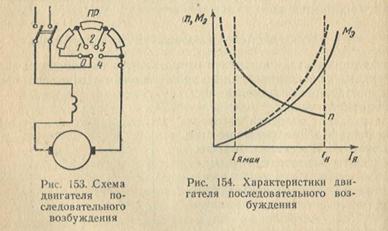
Схема двигателя последовательного возбуждения показана на рис. 153. Пусковой реостат этого двигателя имеет только два зажима, так как обмотка возбуждения и якорь образуют одну последовательную цепь. Характеристики двигателя изображены на рис. 154. Число оборотов двигателя последовательного возбуждения определяется следующим выражением:
![]()
где rс— сопротивление последовательной обмотки возбуждения. В двигателе последовательного возбуждения магнитный поток не остается постоянным, а резко изменяется с изменением нагрузки, что вызывает значительное изменение скорости. Так как падеже напряжения в сопротивлении якоря и в обмотке возбуждения очень мало в сравнении с приложенным напряжением, то число оборотов можно приближенно определить следующим выражением:
![]()
Если пренебречь насыщением стали, то можно считать магнитный поток пропорциональным току в обмотке возбуждения, который равен току в якоре. Следовательно, у двигателя последовательного возбуждения скорость вращения обратно пропорциональна току в якоре и число оборотов резко уменьшается с увеличением нагрузки, т. е. двигатель имеет мягкую скоростную характеристику. С уменьшением нагрузки скорость вращения двигателя увеличивается. При холостом ходе (Iя=0) скорость двигателя беспредельно возрастает, т. е. двигатель идет в разнос.
Таким образом, характерным свойством двигателей последовательного возбуждения является недопустимость сброса нагрузки, т. е. работы вхолостую или при малых нагрузках. Двигатель имеет минимальную допустимую нагрузку, составляющую 25—30% номинальной. При нагрузке меньше минимально допустимой скорость двигателя резко увеличивается, что может вызвать его разрушение. Поэтому, когда возможны сбросы или резкие уменьшения нагрузки, использование двигателей последовательного возбуждения является недопустимым.
В двигателях очень малых мощностей сброс нагрузки не вызывает разноса, так как механические потери двигателя будут достаточно большой нагрузкой для него.
Вращающий момент двигателя последовательного возбуждения, учитывая пропорциональную зависимость между магнитным потоком и током в якоре (Ф = С’Iя), можно определить следующим выражением:
![]()
где K’=KC’
т. е. вращающий момент пропорционален квадрату тока. Однако при больших токах сказывается насыщение стали и зависимость момента приближается к прямой линии. Таким образом двигатели этого типа развивают большие вращающие моменты при малых оборотах, что имеет существенное значение при пуске больших инерционных масс и перегрузках. Эти двигатели широко используют в транспортных и подъемных устройствах.
При смешанном возбуждении возможно как согласное, так и встречное включение обмоток возбуждения.
Двигатели со встречным включением обмоток не нашли широкого применения, так как они обладают плохими пусковыми свойствами и работают неустойчиво.
Скоростные характеристики двигателей смешанного возбуждения занимают промежуточное положение между характеристиками двигателей параллельного и последовательного возбуждения.
С увеличением тока в якоре число оборотов якоря уменьшается в большей мере, чем для двигателей параллельного возбуждения, за счет увеличения магнитного потока, вызываемого увеличением тока в последовательной обмотке возбуждения. При холостом ходе двигатель смешанного возбуждения не идет вразнос, так как магнитный поток не уменьшается до нуля из-за наличия параллельной обмотки возбуждения.
При увеличении нагрузки в двигателях смешанного возбуждения увеличивается магнитный поток и вращающий момент возрастает в большей мере, чем в двигателях параллельного возбуждения, но в меньшей мере, чем в двигателях последовательного возбуждения.
![]()
§ 116 РЕГУЛИРОВАНИЕ СКОРОСТИ ВРАЩЕНИЯ ДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА
Двигатели постоянного тока дают возможность плавно и экономично регулировать скорость вращения в широких пределах. В результате этого весьма ценного свойства двигатели постоянного тока получили широкое распространение и часто являются незаменимыми.
Число оборотов якоря двигателя при любой схеме возбуждения определяется следующим выражением:
![]()
где rс — сопротивление последовательной обмотки возбуждения (для двигателя параллельного возбуждения rс=0). Это выражение показывает, что изменение скорости вращения двигателя можно осуществить изменением напряжения сети, сопротивления цепи якоря и магнитного потока.
Регулирование скорости вращения изменением напряжения сети осуществляется в случае, когда источником электрической энергий двигателя является какой-либо генератор.
Для регулирования скорости вращения двигателя изменением сопротивления цепи якоря используется регулировочный реостат, включенный последовательно с якорем. В отличие от пускового регулировочный реостат должен быть рассчитан на длительное прохождение тока. В сопротивлении регулировочного реостата происходит большая потеря энергии, вследствие чего резко уменьшается
п. д. двигателя.
Регулирование скорости вращения якоря двигателя изменением магнитного потока производится изменением тока в обмотке возбуждения. В двигателях параллельного и смешанного возбуждения включается регулировочный реостат. В двигателях последовательного возбуждения изменение тока в обмотке возбуждения достигается шунтированием этой обмотки каким-либо регулируемым сопротивлением. Этот способ регулирования скорости не создает дополнительных потерь и экономичен.
![]()
§ 117. ПОТЕРИ И К. П. Д. МАШИН ПОСТОЯННОГО ТОКА
В машинах постоянного тока при работе происходит потеря энергии, которая складывается из следующих потерь:
1. Потери в стали Рст на гистерезис и вихревые токи, возникающие в сердечнике якоря. При вращении якоря машины сталь его сердечника непрерывно перемагничивается. На перемагничивание стали затрачивается мощность, называемая потерями на гистерезис. Одновременно, при вращении якоря в магнитном поле в сердечнике его индуктируются вихревые токи. Потери на гистерезис и вихревые токи, называемые потерями в стали, обращаются в тепло и нагревают сердечник якоря.
Потери в стали зависят от магнитной индукции и частоты перемагничивания сердечника якоря.
Магнитная индукция зависит от э. д. с. машины или, иначе, от напряжения, а частота перемагничивания — от скорости вращения якоря. Поэтому при работе машины постоянного тока в режиме генератора или двигателя потери в стали будут постоянными, не зависящими от нагрузки, если напряжение на зажимах якоря и скорость его вращения постоянны.
2. Потери энергии на нагревание проводов обмоток возбуждения и якоря протекающими по ним токами, называемые потерями в меди,— Роб.