
Сегодня в нашем космическом кружке мы рассмотрим орбитальные элементы и основные манёвры. Должен предупредить: в этот раз напрягать извилины придётся сильнее, так что не принимайтесь за чтение, если не готовы или устали. Инструменты KSP позволяют неплохо рисовать орбиты, так что большинство иллюстраций будет прямо из игры. Поехали!
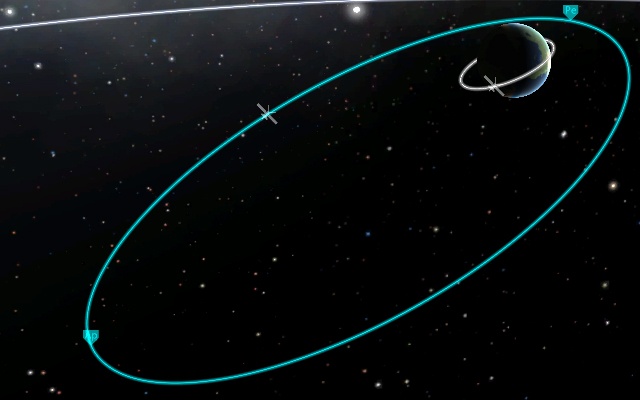
В прошлый раз мы разобрали законы Кеплера и помним, что планеты, их спутники и космические аппараты движутся по эллиптическим траекториям. Самая близкая к центру притяжения точка орбиты — это перигей, а самая удалённая — апогей. Они отмечены маркерами Ap и Pe. Плоскость, в которой лежит эллипс — это плоскость орбиты, и она всегда проходит через центр планеты или звезды, вокруг которой обращается корабль.
В Kerbal Space Program не рассматриваются случаи взаимодействия небесных тел сравнимой массы и вообще одновременное действие нескольких источников гравитации. Поэтому такие интересные вещи, как системы двойных звёзд или влияние планет-гигантов остаются за кадром.
Наклонение и узлы
Одной из важнейших характеристик орбиты является её наклонение (Inclination). Величину наклонения орбит спутников договорились отсчитывать от экваториальной плоскости планеты. Таким образом, это угол между плоскостью орбиты и плоскостью экватора. Для планет Солнечной системы наклонение отсчитывается от плоскости орбиты Земли, которая называется эклиптика. Например, орбита нашей Луны наклонена по отношению к экваториальной плоскости Земли примерно на 5°, а сам экватор наклонён к плоскости эклиптики на ~23°.

Кербину «повезло». Плоскость его экватора совпадает с плоскостью эклиптики (i=0°). Более того, главный космодром Кербина располагается точно на экваторе планеты, что позволяет запускать ракеты на орбиты с любым наклонением. Мы же пока не можем таким похвастать, например, знаменитый мыс Канаверал расположен на широте 28°N, а Байконур и вовсе на 46°N. Подумайте, какого минимального наклона орбиты можно достичь при запуске из этих точек?
Точки пересечения орбиты с плоскостями экватора, эклиптики или других орбит называются узлы. Давайте разберемся на примере экваториальной плоскости Кербина. В игре её можно увидеть, «прицелившись» в Мун — оказывается, его орбита также имеет нулевое наклонение и совпадает с плоскостью экватора. Точка, в которой космолёт пересекает экватор с юга на север называется восходящий узел (Ascending Node, AN), с севера на юг — нисходящий узел (Descending Node, DN). Линия, соединяющая узлы, всегда проходит через центр притяжения.

Базовые манёвры и дельта-V
Каждому начинающему кербонавту необходимо осознать — на орбите нельзя резко сменить направление движения. Представьте, что вы несётесь по обледеневшей дороге со скоростью семь тысяч километров в час — повернуть или затормозить будет непросто. Однако, есть и обратная сторона. Любое, даже самое кратковременное, включение двигателей приведёт к изменению орбитальной траектории. Не здесь и сейчас, но где-то в другой части орбиты.
«Усилие», которое нужно приложить для изменения орбиты характеризуется величиной ΔV. Она показывает, на сколько нужно изменить скорость космического аппарата, чтобы перейти с одной траектории на другую. Манёвры с использованием двигателей можно разделить на «импульсные» и «не-импульсные«. Эти определения не имеют отношения к физическому понятию импульса, а характеризуют продолжительность приложения движущей силы.
Импульсный манёвр — это математическая модель, подразумевающая мгновенное изменение скорости космического аппарата в заданной точке орбиты. Понятно, что в реальности соблюсти это условие невозможно, ведь двигатели имеют ограниченную тягу, но в космических масштабах погрешность будет невелика. Её можно свести к минимуму, зная время, необходимое для нужного изменения скорости.
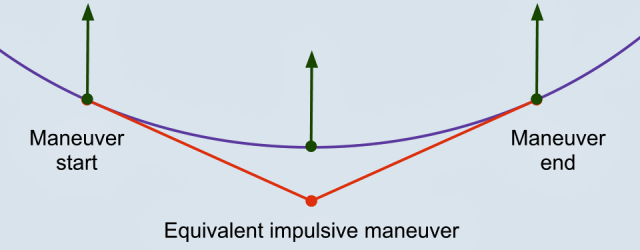
Не-импульсный манёвр подразумевает работу двигателя с низкой тягой продолжительное время и его расчёт требует информации о многих параметрах космического аппарата. В орбитальном планировщике KSP вычисления проводятся пока только по модели импульсных манёвров и пилотирование специфических кораблей с малой тягой, например, на ионных двигателях, требует дополнительного «раскидывания мозгами».
Помимо непосредственного значения ΔV нужно знать, в какую сторону его направить. В зависимости от направления приложения силы результат изменения орбиты будет различным.

В системе координат орбитальных манёвров три главные оси:
- Ось движения, направленная по касательной к орбите
- Ось нормали, направленная перпендикулярно орбите
- Ось радиуса, направленная к центру эллипса орбиты
На первый взгляд это кажется сложным. Давайте разбираться.
Большинство манёвров на орбите производится вдоль оси движения космического аппарата. Вектор, совпадающий с вектором скорости корабля называется прямым, а противоположный ему — обратным. В англоязычной среде этому соответствуют термины Prograde и Retrograde, которые часто просто транслитерируются. Направление прогрейда отмечено желтоватым кружком, а ретрогрейда — таким же кружком, но перечёркнутым. Эти же маркеры можно увидеть на navball’е.
Зажигания двигателей в прямом или обратном направлении непосредственно влияют на скорость корабля в данный момент и меняют перигей и апогей орбиты. Если разгоняться в перигее, апогей увеличится, а если тормозить — уменьшится. В апогее та же картина: если разгоняться, перигей поднимается, а если тормозить — опускается. Импульсы вдоль оси движения влияют на форму и ориентацию* орбиты и не изменяют её наклон.

Перпендикулярная плоскости орбиты ось нормали отмечена треугольными пурпурными маркерами. Импульсы вдоль оси нормали влияют только на наклон орбиты и не изменяют ни её формы, ни ориентации*. При этом плоскость орбиты вращается вокруг прямой, соединяющей точку зажигания с центром притяжения. Представьте, что в момент совершения манёвра вы берёте длинную иголку и прикалываете свой корабль к центру планеты — вокруг этой неподвижной иглы и будет поворачиваться плоскость вашей орбиты.

Третья, радиальная ось используется реже всего, но не менее важна. Она отмечена маркерами в виде синих кружков. Импульсы вдоль радиальной оси влияют на ориентацию* и форму орбиты в её плоскости, но не изменяют наклон. В разных точках траектории зажигания по радиальной оси имеют разные результаты, но, к сожалению, для рассмотрения этого в подробностях придётся написать заметку сравнимого объёма. Например, импульсы вблизи перигея приводят к развороту орбиты.

 Давайте сейчас остановимся на этом. Теперь мы знаем, как совершать простые орбитальные манёвры, знаем, что такое дельта-V и как нужно зажигать, чтобы добиться желаемого. Мы готовы к тому, чтобы устроить встречу двух кораблей в космосе. О внутриигровом планировщике орбит и стыковке я расскажу в следующих обзорах интерфейса.
Давайте сейчас остановимся на этом. Теперь мы знаем, как совершать простые орбитальные манёвры, знаем, что такое дельта-V и как нужно зажигать, чтобы добиться желаемого. Мы готовы к тому, чтобы устроить встречу двух кораблей в космосе. О внутриигровом планировщике орбит и стыковке я расскажу в следующих обзорах интерфейса.
Читайте также
Это — краткая «шпаргалка» по орбитальным маневрам, содержащая немного информации по особенностям, математике, вводной информации или видео-контенту (все это гораздо понятней представлено на других страницах и статьях). Эта статья, напротив, предназначена в качестве справочника, используемого в процессе игры.
Contents
- 1 Вывод на орбиту
- 2 Изменение формы орбиты
- 3 Совмещение наклонений орбит
- 4 Стыковка/Сближение
- 5 Обратите внимание
Вывод на орбиту
- Летите вертикально вверх, по крайней мере, 10 км. Посмотрите таблицу, приведенную ниже для выбора оптимальной скорости подъема.
- После достижения 10 км., начните гравитационный маневр при помощи медленного наклона на восток (примерно 90 градусов на Вашем НавБолле, обычно «справа» от стандартного Стартового стола). Вы можете совершить наклон также и в другие направления, но движение на восток экономит топливо, поскольку к движению добавляется импульс от собственного вращения Кербина.
- Продолжайте ускорение до тех пор, пока апоцентр Вашей траектории (нажмите клавишу M и наведите курсор мыши на узел «Ap») не станет выше 70 км. (верхняя граница атмосферы Кербина) — в идеальном случае, около 100 км.
- Выключите подачу топлива к Вашим двигателям (нажатие на клавишу X) и ждите до того момента, пока не достигните точки апоцентра.
- Ускоряйтесь по касательной к орбите (т.е. в направлении Вашего движения, которое представлено зеленой окружностью на Вашем НавБолле) до тех пор, пока перицентр Вашей орбиты (также отображаемый на Вашей карте) также не достигнет значения около 100 км.
Вы можете сохранить топливо при движении близко к своей предельной скорости падения во время подъема. Меньшая скорость расходует дельта-V на гравитационные потери, большая — расходует на противодействие воздушному сопротивлению:
| Высота (англ. «Altitude») (м.) | Примерная предельная скорость падения (м./с.) |
|---|---|
| 500 | 105 |
| 1,000 | 110 |
| 2,000 | 120 |
| 3,000 | 130 |
| 5,000 | 160 |
| 6,000 | 180 |
| 7,000 | 200 |
| 8,000 | 220 |
| 10,000 | 260 (Не забудьте начать гравитационный маневр!) |
| 13,000 | 350 |
| 15,000 | 425 |
| 16,000 | 470 |
| 32,000 | 2250 |
Изменение формы орбиты
В целом, включение тяги по направлению движения, сделает Вашу орбиту «больше», а включение против направления движения — «меньше».
Понижение Вашего апоцентра производится включением двигателя против направления движения (смотрите на НавБолл) в Вашем перицентре. В отличии от этого, подъем Вашего апоцентра производится включением двигателя по направлению движения в Вашем перицентре.
Понижение Вашего перицентра производится включением двигателя против направления движения в Вашем апоцентре. Подъем Вашего перицентра производится включением двигателя по направлению движения в Вашем апоцентре.
Совмещение наклонений орбит
Если Вам необходимо вывести космический аппарат на такую же самую орбиту, как и у другого объекта (планета, космический корабль, и т.д.), установите его в качестве своей цели в Общем обзоре карты. Вы должны увидеть две зеленых стрелки, промаркированные как «Восходящий узел» (англ. «ascending node») и «Нисходящий узел» (англ. «descending node»), где пересекаются траектории движения обеих объектов.
Направление, в котором космический аппарат должен включить двигатели, зависит от направления движения на текущей орбите по отношению к целевому наклонению орбиты. Если задержать курсор мыши над маркерами восходящего или нисходящего узлов, то увидите различие между ними в градусах. Оба значения показывают одинаковое отличие, но нисходящий узел показывает значение как отрицательное число, в то время как восходящий узел показывает значение как положительное. Если космический аппарат движется через восходящий узел, то угол должен быть положительным, то необходимо включить двигатель в направлении «антинормали»a![]() (Юг для экваториальной орбиты). Если космический аппарат движется через нисходящий узел, и угол — отрицательный, то необходимо включить двигатель в направлении «нормали»
(Юг для экваториальной орбиты). Если космический аппарат движется через нисходящий узел, и угол — отрицательный, то необходимо включить двигатель в направлении «нормали»![]() (Север для экваториальной орбиты).
(Север для экваториальной орбиты).
Если Вам необходимо сделать несколько включений двигателя, чтобы достичь желаемого Вами наклонения, помните, что, если Вы включаете двигатель в направлении «нормально» по отношению к орбите на одном узле, то Вы должны включить двигатель «антинормально» на другом для продолжения движения в том же направлении.
Это должно также помочь при планировании включения Ваших двигателей, с использованием системы планирования орбитальных маневров в Общем обзоре карты, где «нормальное» и «антинормальное» направления указаны фиолетовыми значками. Совмещение наклонения орбит является крайне важным первым шагом при сближении или стыковке.
Стыковка/Сближение
- → Смотрите также: Orbital rendezvous/ru
Орбитальное сближение — один из самых сложных маневров, требующий идеального совпадения по орбитам и положению. Выполните шаги, указанные ниже для того, чтобы разобраться в этом на своей первой попытке и почувствовать себя настоящим космическим волком. Эти шаги также подходят для выхода на орбиту вокруг планет и лун.
- Перейдите в Общий обзор карты и используйте инструмент планирования маневра.
- Начните маневр совмещения наклонений орбит как описано выше. Во время последующих действий стоит иногда проверять совпадение наклонений, чтобы гарантировать, что наклонение по-прежнему совпадает или включать маневровые двигатели по мере необходимости.
- Поместите одну точку на свою орбиту (идеально — в точке апсид) по касательной к целевой орбите. Вы должны увидеть оранжевую/пурпурную пару стрелок. Каждая цветная стрелка соответствует Вашей позиции относительно Вашей цели. Оранжевая — это ближайшая встреча, а пурпурная — следующая после нее встреча.
- В точке ближайшей встречи совершите маневр, чтобы:
- Ваши орбиты стали максимально близки друг к другу.
- При следующей встрече (здесь, возможно, обратно направо) расстояние между аппаратами на орбитах составляло 0.5 км. или около того.
- При достижении такой встречи, включите двигатели для совмещения скоростей. Для того, чтобы это сделать — перейдите обратно в экран отделения ступеней или экран стыковки. Щелкайте курсором мыши по «Ориентиру» (англ. «point of reference») на НавБолле пока он не выведет на экран скорость относительно цели. Поворачивайте «Авиагоризонт» (англ. «Level indicator»)
 (который указывает направление, на которое указывает Ваш аппарат) до тех пор, пока он не совпадет со значком «Обратного направления» (англ. «Retrograde»)
(который указывает направление, на которое указывает Ваш аппарат) до тех пор, пока он не совпадет со значком «Обратного направления» (англ. «Retrograde»)  и используйте двигатели до тех пор, пока Ваша скорость относительно цели (отображается в верхней части НавБолла) не станет близка к нулю (идеально — меньше, чем 1–2 м/с). В этой точке Ваш аппарат максимально близко к цели и практически неподвижен относительно нее — Ваши орбиты и скорости теперь должны быть практически идентичными, а расстояние между положениями — меньше километра.
и используйте двигатели до тех пор, пока Ваша скорость относительно цели (отображается в верхней части НавБолла) не станет близка к нулю (идеально — меньше, чем 1–2 м/с). В этой точке Ваш аппарат максимально близко к цели и практически неподвижен относительно нее — Ваши орбиты и скорости теперь должны быть практически идентичными, а расстояние между положениями — меньше километра. - Теперь повернитесь так, чтобы «Авиагоризонт» (англ. «Level indicator») совпал со значком «Направление на цель» (англ. «Target Prograde») . Это указывает, что нос Вашего аппарата направлен к цели. Вы должны сохранить эти маркеры совпадающими, поскольку Вы приближаетесь к цели, до тех пор, пока Вы не будете в нескольких метрах для заключительного маневра стыковки. Использование Системы автоматической стабилизации может помочь в этом.
- Включите свою Систему ориентации, это даст Вам лучшее управление над своим приближением.
- Нажмите клавишу H для начала движения прямо в направлении цели. Вы должны поддержать относительную скорость на низком уровне при своем приближении (меньше 10 м/с на расстоянии, большем чем 500 м., медленнее — при приближении). Вы должны увидеть значок «Прямого направления» (англ. «Prograde») , который расположится на одной линии со значком «Направление на цель» (англ. «Target Prograde») (проверьте, что в Вашем НавБолле в качестве цели (англ. «Target») все еще указан его «Ориентир» (англ. «Point of Reference»)). Используйте клавиши боковых маневровых двигателей (I,J,K и L) для корректировки положения значка «Прямого направления» (англ. «Prograde») при своем приближении, и удержания его на одной линии со значком «Направление на цель» (англ. «Target Prograde») .
- Как только Вы окажетесь достаточно близко, используйте клавишу N для замедления своего приближения. Замедляйтесь постепенно до ~1 м/с к тому времени, когда Вы достигните расстояния в 50 метров или около того. В конечном счете, остановитесь (0 м/с относительной скорости) близко к цели.
- Попытайтесь не врезаться во что-либо во время своей стыковки. Смотрите статью «Стыковка» для того, чтобы действительно понять как присоединять свой аппарат.
Обратите внимание
- «Основы стыковки» — руководство;
- Шпаргалка;
Для начала перейдем в режим карты, нажав кнопку M:
Мы видим, что наша орбита не круглая, а вытянутая. Для того, чтобы ее вытянуть, мы будем использовать Маневры. Нажмите в любой точке вашей орбиты и выберите пункт Add Maneuver. В выбранной точке появился инструмент настройки маневра:
Итак, маневр создан, теперь нужно его настроить. Тянем за один из маркеров и видим, что появилась еще одна орбита, выделенная пунктиром. Это наша орбита после выполнения маневра. Делаем ее круглой (у меня апогей и перигей приблизительно 440 км).
Переходим в режим полета кнопкой M. Включаем системы RCS и SAS кнопками R и T и видим, что кнопка Maneuver слева от НавБолла стала активной. Нажимаем на нее и видим, что система SAS тут же начала выравнивать нашу ракету по направлению маневра. Подождем, пока SAS закончит стабилизацию. Справа от НавБолла появились такие индикаторы:
Теперь нам пригодятся две полезных функции, добавленные в KSP 1.0 – Warp Here и Warp to Next Maneuver. Нажмем на любую точку орбиты на отрезке ракета – маневр и выберем пункт Warp Here. Система ускорит время, а потом уберет ускорение. Таким образом можно быстро и удобно попасть в любую точку орбиты. Также есть еще одна полезная функция — Warp to Next Maneuver. Нажмем на любую точку орбиты вне отрезка ракета – маневр и выберем пункт Warp to Next Maneuver. Система перенесет вас к текущему маневру (оставляя резерв в 1 минуту).
Теперь я объясню, зачем нужны индикаторы справа от НавБолла. Est. Burn – это необходимое время работы двигателей. Node in T – это время до маневра. Желтая полоска со значением скорости это Дельта, т.е. разница скоростей – текущей и необходимой для маневра. Чем ближе Дельта к нулю в момент начала маневра (Node in T = 0), тем точнее получится маневр.
Дальше двигатель следует включать лишь в определённое время. Для точного маневра его нужно включить за ½ значения Est. Burn до маневра. Например, если Est. Burn = 10 (как в моем случае), то двигатель нужно включить за 5 секунд до маневра, или когда Node in T = 5.
И вот мы дождались нужного момента, включаем двигатель, открываем карту, и видим, что орбита меняется. Выключить двигатели нужно, когда ваша орбита и пунктирная орбита маневра на карте сойдутся, или когда Est. Burn = 0 и Node in T = 0.
После выполнения маневра его рекомендуется удалить.
И вот наша орбита круглая!
На этом данный урок закончен, удачных полетов и мягких приземлений!
5 апреля 2017
5.04.17
2
43K
Небольшой гайд по базовым задачам в Kerbal Space Program, написанный не столько об игре, сколько об основах космодинамики в целом и орбитальной механики в частности, также рассказывающий некоторые не включённые в игру подробности о работе космических аппаратов в реальности. Понимание физических законов подготовит не только к совершению спланированных манёвров, но и к быстрой импровизации, временами необходимой в условиях космоса. Но, хоть гайд и небольшой, текста будет много. К этому стоит морально готовиться.
Интерфейс игры, пешие прогулки и космомодули вроде датчиков температуры/давления имеют мало общего с орбитальной механикой, с ними вполне можно разобраться, не напрягаясь, и я не буду на этом останавливаться. В данном руководстве не будет формул, а всё, что ими обычно описывается, будет изложено простым языком. Этого должно хватить для того, чтобы вся базовая космодинамика усвоилась ровно чтобы понимать, какие действия мы совершаем в игре и как это работает в реальности.
Также я постарался не вываливать страницы терминов, а вводить необходимые понятия тогда, когда они действительно понадобятся нам на практике. Поэтому вместо теории давайте сразу пройдём в ракетостроительный ангар.
Первый полёт.
Важные точки корабля
Самое первое, что вам предложат сделать — это провести первый запуск. Для первого нашего полёта желательно знать, как вообще летит ракета. Любой ракетный двигатель выбрасывает из ракеты определённую массу и таким образом ракета прилагает к этой массе некую силу, выталкивая её. Согласно третьему закону Ньютона (закону равенства действия и проитиводействия) эта масса оказывает ответное давление на ракету, которая при этом стремится в сторону, противоположную потоку выбрасываемого вещества (см. рис.1). Это давление называется силой тяги.
Итак, необходим корабль. Любой аппарат должен чем-то или кем-то управляться, поэтому прежде всего обращаем внимание на модуль, в который сможет влезть наш астронавт (в дальнейшем появятся роботизированные командные центры и расширенные модули на несколько членов экипажа).
Сейчас и далее я предлагаю решать любую поставленную задачу с конца, т.е. думать сначала о том, какие действия наш аппарат будет совершать в последнюю очередь, а потом уже двигаться назад в хронологической последовательности. Например, если мы говорим про первый взлёт, то расклад будет такой. На поверхности планеты должен остаться наш управляющий модуль с астронавтом. Чтобы не разбиться о землю, ему понадобится парашют. И далее нужны непосредственно двигатели, причём столько, чтобы парашют смог выдержать общий вес корабля (здесь и далее мы будем пользоваться словарными определениями — масса есть количество вещества, а вес — сила воздействия на опору, путать их нельзя). Для простого запуска без какой-либо цели можно взять самый дешёвый твердотопливный двигатель.
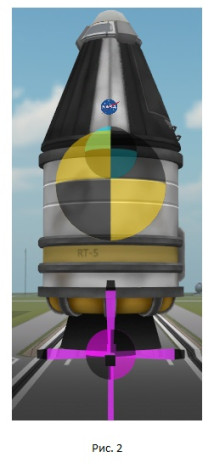
Обратите внимание на панель с кнопками, показывающими центр массы (mass), центр подъёмной силы (aerodynamic) и центр тяги (thrust). Они включают отображение соответствующих точек на модели нашей ракеты (рис. 2).
Центр массы — это точка, характеризующая движение тела как целого. Также он называется точкой инерции, поскольку именно относительно этой точки мы можем рассчитать инерцию тела при приложении силы. Учтите, что в процессе полёта корабля центр массы может меняться в силу расхода топлива в баках, которые станут легче.
Центр тяги — точка, находящаяся между точками истечения сил с таким расчётом, чтобы уравнивать их общую силу в одном направлении (указанном на точке) относительно всего корабля. Наиболее важна для нас будет эта точка в аэродинамических расчётах, поскольку космические аппараты редко используют все двигатели сразу, кроме того, они обычно центрально симметричны по продольной оси, а значит, точка будет лежать на этой оси.
Центр подъёмной силы — точка, находящаяся между поверхностями крыльев так, чтобы уравнивать общую подъёмную силу крыльев в одном направлении (указанном на точке) относительно корабля. Опять же, центр подъёмной силы может изменяться при отделении ступеней. Кроме того, на аппаратах вертикального взлёта крыльями редко создают подъёмную силу как таковую, в силу чего этот параметр тоже важен в основном для аэродинамики.

Если вы хотите, чтобы ракета в отсутствие приложения силы летела прямо (а вы этого обычно очень хотите), то центр массы и центр тяги должны находиться вдоль оси, по которой вы будете лететь, относительно друг друга (рис. 3)! Иначе начнутся кувырки, которые обычно приводят к незапланированной посадке. Также не рекомендуется ставить центр тяги выше центра массы относительно поверхности планеты, поскольку в этом случае в полёте начнёт раскачиваться нижняя часть. Когда конструкция собрана, нужно распределить контролируемые элементы в нужной последовательности в панели ступеней. Сделайте так, чтобы сначала срабатывал двигатель, а затем уже парашют.
Итак, аппарат готов. На площадке вам нужно инициировать запуск, после чего ракета начнёт набирать высоту и скорость. Исчерпав ресурс, она будет падать на землю. Если в этот момент вы позволите ракете долгое время просто лететь носом вниз, то запустить парашют вам не удастся, поскольку сопротивления воздуха не хватит на торможение, и скоро будет достигнута скорость, на которой парашют оторвёт тем же сопротивлением воздуха. Поэтому пристально следите за тем, чтобы при падении вы успели открыть парашют там, где уже достаточно воздуха для начала торможения, но ракета ещё не набрала высокую скорость движения к земле. Когда парашют будет открыт, вам останется только наблюдать за посадкой. Итак, ваша космонавтика достигла 1633 года, когда в Стамбуле впервые был произведён успешный запуск пилотируемой ракеты. Да-да, уже в 17 веке ракета представляла собой примерно ту же конструкцию — конус, содержащий пилота (звали его Лагари Хасан-челеби), твердотопливные двигатели, работавшие на стабилизированном порохе, и импровизированный парашют-крылья. Собственно, в течение следующих трёх веков парашюты претерпели куда больше изменений, чем ракеты.
Покидаем атмосферу и возвращаемся.
Поговорим о топливе, двигателях и стабилизации
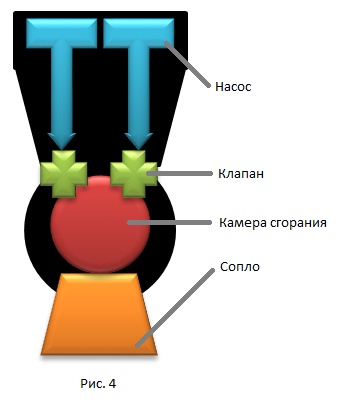
Заработав немного очков науки на полётах и открыв немного новых деталей, вы получите задание выйти за пределы атмосферы. Для этого вам потребуется несколько большая мощность ускорителей и некоторые знания о них. Жидкое топливо будет нашим основным средством в проведении космических манёвров. Двигатель, потребляющий его (рис.4), будет требовать для работы непосредственно само горючее (liquid fuel) и окислитель (oxidizer), которые должны находиться в баке, соединённом с двигателем конструкциями, способными проводить топливо. Обратите внимание на то, что существуют баки, предназначенные для полётов в атмосфере, они не содержат окислителя и не смогут поддерживать двигатели вне атмосферы.
С горючим всё более-менее понятно. Им может быть керосин, водород, гидразин и ещё несколько горючих соединений в зависимости от требуемой температуры горения и доступного объёма.
Что же скрывается за простым словом «окислитель»? Конечно, по самому слову понятно, что в основном это кислород. В нашей повседневности именно он и выступает реагентом большинства окислений, поскольку находится прямо в воздухе. В космических полётах используется кислород в жидком виде. Однако это не единственный вариант. К примеру, окислителем может выступать азотный тетраоксид, который не горюч, да и кипит при +21 градусе по цельсию, а значит, его куда проще хранить и транспортировать. Из менее очевидных примеров — в качестве окислителя используется фтор, крайне взрывоопасный и токсичный, способный сжечь почти любое вещество, включая воду, зато позволяющий максимально уплотнить топливо и достичь высочайших температур горения.
В ракетной промышленности к топливу предъявляются очень суровые требования.
Прежде всего требуется создать как можно более плотное топливо, сэкономив объём, и приоритет отдаётся веществам, которые можно хорошо сжать.
Далее встаёт проблема хранения и транспортировки, и мы обращаем внимание на температуру кипения компонентов топлива. Многие из них кипят даже при таких низких температурах, которых нет в природе, а значит, перевозить их или хранить попросту невозможно, как невозможно и проводить долгие полёты, не говоря уже о том, что на ракете ещё на стартовой площадке начинает образовываться лёд, который может привести к аварии.
Также для нас важна химическая агрессивность окислителей топлива, ведь при использовании таких веществ реакция должна протекать контролируемо, а даже жирный отпечаток пальца на стенке бака может привести к возгоранию жира в кислой среде, вызвав пожар, в котором сгорать будет уже не только горючее, а и сам металл, из которого сделана ракета.
Счастье, что разработчики KSP не заставляют нас выбирать компоненты для топлива наших ракет — оно всегда работает безотказно и хранится неограниченное время, а значит, жидкотопливные ускорители для нас практически не имеют минусов.
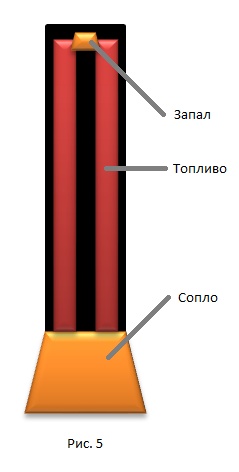
Твердотопливные (solid fuel) ускорители (рис.5) отличаются тем, что их нельзя контролировать. Вы можете уменьшить объём загруженного топлива или максимальную тягу на стадии проектирования, но после запуска он будет в полную силу ускорять наш аппарат, пока не выработает весь ресурс, а затем погаснет навсегда. Такие ускорители хороши тем, что они дёшевые, лёгкие и не требуют дополнительных элементов конструкции (а в реальности ещё и тем, что имеют высокую надёжность, поскольку при отсутствии ускорения корабль находится в состоянии свободного падения, и в таком же состоянии находится само топливо, а значит, при зажигании двигателя на жидком топливе есть риск того, что оно будет болтаться вне контакта с зажиганием, а значит, не будет своевременно подано; данную ситуацию обычно предупреждают тем, что при старте жидкотопливного двигателя кораблю посредством других средств сообщают небольшое ускорение, но в игре данный метод не реализован и двигатели всегда работают штатно, безмерно радуя астронавтов). Принцип работы такого ускорителя куда проще — запал поджигает топливо, в составе которого уже есть окислитель, и при сгорании смесь выходит через сопло. Топлива могут применяться самые разные. Лагари летал на дымном порохе, моделисты используют так называемую «карамель» — нитрат калия и сахар. В современных ракетных двигателях же наиболее часто в качестве окислителя используются селитры и перхлораты, а вот горючее может быть самым разнообразным. Например, часто в его роли выступает обычный алюминий. Или каучук.
Стоит знать, что самый очевидный метод запустить ракету подальше — навешивание ускорителей везде, где только можно — не всегда работает, не говоря уже о росте стоимости вашей ракеты в результате такого подхода. Дело в том, что инициированные двигатели будут вынуждены ускорять всю общую массу аппарата, в том числе массу ещё не инициированных двигателей. Поэтому КПД нижних ступеней упадёт в зависимости от переносимой массы вплоть до полной бесполезности. Старт же всех ускорителей одновременно будет, во-первых, конструктивно сложен, поскольку пламя, попадающее прямо на части ракеты, будет разогревать их, чего стоит избегать по возможности, и во-вторых, возможна ситуация, в которой скорость прохождения атмосферы будет столь велика, что нагрев трением о воздух уничтожит некоторые детали ракеты.
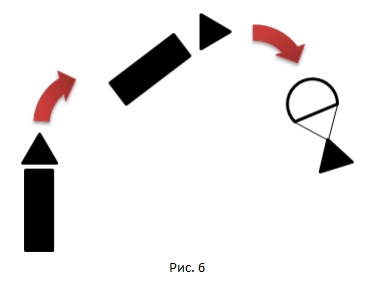
Для того, чтобы не тащить бесполезный груз, в нашем распоряжении есть пиропатроны (decouplers). Это части ракеты, разделяющие ступени. В соединённом состоянии они сообщают частям аппарата жёсткость корпуса, а при активации раскидывают их с небольшим импульсом в разные стороны. Следите за тем, чтобы пиропатроны не инициировались одновременно с двигателями, которые они отделяют. Большая часть аппаратов, которые вы спроектируете, будут состоять из нескольких ступеней, как предлагал в своё время Циолковский (см. рис. 6).
Конечно, в реальности большое количество ступеней — это большое количество элементов, которые одноразовы и их нельзя протестировать перед запуском, а значит, и меньшая надёжность всего аппарата в целом, но в игре поломки нам не грозят, и мы можем плодить ступени хоть десятками, было бы зачем. Обратите внимание на то, что для успешного взлёта необходимо реактивное ускорение, превосходящее ускорение свободного падения, а значит, ускоритель должен нести груз, который весит тем меньше, чем больше аппарат преодолевает гравитацию (которая сильнее ощущается при приближении к объекту, в гравитационном поле которого мы находимся).
Также стоит учесть, что чем больше наше ускорение будет превосходить гравитацию, тем меньше потерь энергии мы понесём в силу того, что гравитация будет действовать меньшее время. Но не увлекайтесь, это грозит перегревом.
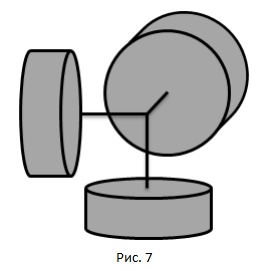
Итак, несколько ступеней с двигателями помогут вам достичь нужной высоты. Если вы замечаете ненужные кувырки и непроизвольное изменение траектории при взлёте, обратите внимание на систему стабилизации SAS, принцип которой придуман ещё Циолковским — по трём осям установлены тяжёлые диски-маховики, которые могут вращаться вокруг своей оси и стремятся сохранить свою инерцию вращения, противодействуя таким образом внешним эффектам (рис.7). В более поздних версиях таких систем диски заменены одним шарообразным маховиком, который может вращаться по трём осям сразу. В случае необходимости маховик может раскручиваться сильнее или слабее, сообщая противодействие кораблю. Такая система позволяет корректировать или стабилизировать курс, вращая ту часть, на которой она установлена (по умолчанию это командный отсек), вокруг центра массы. Это требует электрического заряда, который накапливается в аккумуляторах или том же командном отсеке либо обеспечивается работой двигателя. Чем больше масса аппарата, тем слабее будет ощущаться действие SAS, а значит, на самом взлёте компенсировать отклонение сложнее всего.
Если даже при включении стабилизации ракета отклоняется сильно, то её можно стабилизировать добавлением закрылков. Располагайте их центрально симметрично и как можно ближе к хвосту ракеты, чтобы повысить эффективность маневрирования (как на фотографии Фау-2). Если и это не помогает, то можно попробовать слегка повернуть закрылки относительно потока воздуха, тогда при взлёте аппарат будет довольно быстро вращаться вокруг своей оси, поддерживая таким образом стабильность. За космонавтов не волнуйтесь, они привычные.

Итак, атмосфера осталась там, внизу, и мы достигли успехов космонавтики 1944 года, когда немецкая ракета Фау-2 вышла за пределы земной атмосферы.
Примерно к этому моменту вы сможете осознанно достигать нужных скоростей на нужной высоте, грамотно устанавливая тягу ускорителей и объем топлива для них. Для этого потребуется немного практики, поскольку настройка должна быть очень точной — иной раз 5% топлива стартового ускорителя означают 200 м/с на нужной части траектории. Умение примерно знать соотношения веса и тяги для достижения высот и скоростей позволят вам без проблем выполнять задания на тесты оборудования, зарабатывая таким образом на новые детали. Также вы сможете выполнять задания по достижению определённых точек планеты на больших высотах, просто отклоняя при старте и полёте ракету в нужном направлении. Учтите, что в этом случае вам придётся компенсировать вращение планеты, а значит, безоговорочно полагаться на траектории на карте не выйдет, и нужно лететь по навигационной панели.
Создание самолёта.
Про оси и ещё раз про оси
Через некоторое время вам станут доступны задания по различным измерениям на поверхности или малых высотах, и направить туда ракету будет очень сложно. Значит, нужно приступить к созданию самолёта.
Для двигателей самолёта нам не обязательно иметь окислитель, поскольку в атмосфере достаточно кислорода, который можно подать посредством воздухозаборников, однако стоит запомнить, что у каждого двигателя есть свой потолок высоты, при приближении к которому его тяга будет падать из-за недостатка окислителя. Двигатель самолёта нужен нам исключительно для ускорения относительно оси движения, а вверх нас будет тянуть подъёмная сила крыла. Крылья в игре действуют примерно одинаково и не различаются по профилю, поэтому не будем вдаваться в подробности образования подъёмной силы, просто заметим, что она возникает из-за неравномерности обтекания крыла потоком воздуха (если вам интересна эта тема, то можно изучить теорему Жуковского) и что направлена она перпендикулярно поверхности крыла (не пробуйте изменять угол атаки, то есть угол поверхности крыла относительно потока воздуха, в игре, в отличие от реальности, это не работает, а просто отклоняет подъёмную силу назад, что нам не нужно).
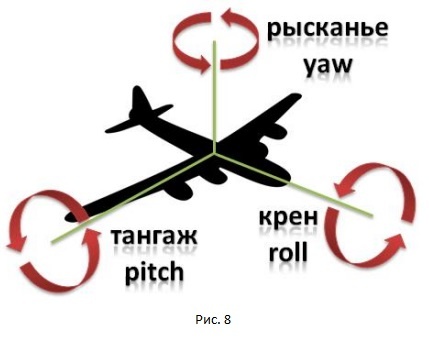
В процессе мы будем часто управлять вращением самолёта уже не относительно планеты, а относительно центра массы самолёта, чтобы максимально эффективно использовать потоки воздуха для маневрирования. Вращение вокруг центра массы осуществляется по трём осям. Вращение вдоль продольной оси самолета называется креном (roll), вдоль поперечной — тангажом (pitch), а вдоль вертикальной оси — рысканьем (yaw). Наша задача — стабилизировать полёт самолёта, чтобы при ровном полёте он не отклонялся от курса ни по одной оси. Для этого требуется обеспечить соосность центра тяги и центра массы аппарата, как и раньше, но при этом желательно полностью совместить центр массы с центром подъёмной силы. Если допустить отклонение этих центров по продольной оси, то самолёт будет постоянно стремиться к снижению или возвышению, что требует постоянной компенсации. Теоретически, конечно, такие отклонения можно компенсировать переносом центра тяги ниже или выше продольной оси, проходящей через центр массы. Например, у многих современных истребителей центр тяги находится ниже, но центр массы относительно центра подъёмной силы смещён вперёд. Однако в игре нам гораздо проще искусственно совместить центры, чем возиться с компенсацией отклонений.
Также самолёту нужно иметь элероны, руль высоты и руль направления — особые плоскости крыльев и хвоста, которые могут отклоняться под определённым углом, перенаправляя потоки воздуха. Элероны располагаются на концах крыльев вдоль оси тангажа и управляют креном, руль высоты располагается в хвосте вдоль оси тангажа и управляет тангажом, руль направления располагается в хвосте параллельно оси рысканья и управляет рысканьем. В игре упрощённая система управления рулями, поэтому одни и те же устройства могут иметь разный функционал, например, если крылья сдвинуты к хвосту, то их элероны могут служить рулём высоты, и вам не потребуется как-то назначать кнопки. Можно даже поставить крылья под углом, и их элероны будут одновременно управлять всеми осями, пусть и менее эффективно. Однако для простоты восприятия я рекомендовал бы использовать классическую компоновку, даже если из-за этого страдает внешний вид или простота конструкции аппарата.
Управление самолётом простое, куда проще управления ракетой. Однако есть один момент, который стоит прояснить. Если вам нужна смена курса, не стоит использовать для этого руль направления! Рысканье — это средство для минимальной поправки, не для манёвра. Гораздо лучше будет накрениться в нужную сторону и управлять тангажом, а потом выравниваться.
Для взлёта и посадки мы будем использовать шасси. Всегда стоит учитывать, что шасси выдерживают не любые нагрузки. Они могут быть уничтожены как ударом на высокой скорости, так и чрезмерным давлением, то есть если вы сажаете тяжёлый самолёт, то это нужно делать очень и очень плавно, на все колёса, на минимальных скоростях и минимальном угле между полоскостью крыльев и поверхности. Иногда также будет необходимость сесть в горном регионе, где стандартная посадка очень опасна. Поэтому на всякий случай рекомендую добавить на самолёт несколько парашютов, расставленных вокруг центра массы так, чтобы опускаться плоско по отношению к земле. И не забудьте, что если на борту находится инженер, то он с радостью перепакует ваши парашюты, а значит, вы сможете облететь больше точек за полёт.
Конструкции самолётов будут в течение игры меняться минимально, принципы управления тоже, а новые детали откроют вам разве что новые скорости, потолки высоты и лучшее управление, так что это, пожалуй, всё, что нужно знать об авиации. Просто дождитесь хороших деталей и экспериментируйте вволю. Вот, например,
Достижение орбиты.
Бесконечное падение и пара ступеней
Следующим заданием будет выход на орбиту планеты. Начиная с этого момента, исполняя манёвр, в котором вы не уверены, заранее просчитывайте его с помощью системы планирования полёта (для этого придётся усовершенствовать центр контроля за полётами). Точность исполнения манёвров должна быть почти идеальной, так что использовать мощные двигатели для маневрирования не стоит, лучше несколько лишних секунд подождать, чем тратить топливо на исправление ошибок.
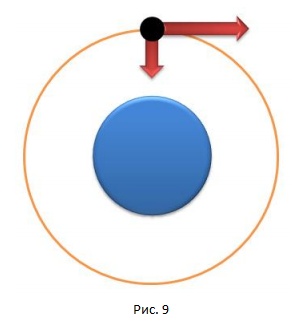
Итак, прежде всего поговорим о том, что такое, собственно, орбита. Все прошлые наши полёты начинались на поверхности и на ней же заканчивались, поскольку нас притягивала сама планета. Кажется, выход прост — покинуть гравитационное поле планеты и висеть себе в космосе, сколько нужно. К сожалению, этот план обречён на провал, потому что на корабль на самом деле воздействуют силы притяжения всех окружающих небесных тел. Если мы отлетим достаточно далеко, то действительно выйдем из зоны притяжения планеты, но нас начнёт неумолимо тянуть к звезде, вокруг которой эта планета вращается, к тому же мы не будем неподвижны даже около звезды, поскольку обладаем относительно неё скоростью, которую имела планета. Выход, впрочем, есть. Если мы отлетим от поверхности, а потом зададим горизонтальную скорость, то при падении на планету наш корабль промахнётся мимо неё и облетит вокруг. Согласно первому закону Ньютона движение нашей ракеты было бы прямолинейно, если бы не гравитация, а эта гравитация тянет нас вниз, но никак не против вектора нашего горизонтального движения (рис.9). Это означает, что падать мы можем не на планету, а вокруг неё, и падать бесконечно, поскольку притяжение тащит нас вниз так же постоянно, как и заданное горизонтальное ускорение, которое не изменяется никакими другими силами.
Таким образом, перемещение тела на орбите есть постоянное падение и не требует никаких дополнительных усилий. Если вы вывели корабль на орбиту планеты, то висеть там он может веками. Однако позаботьтесь о том, чтобы ни в одной точке полёта не было атмосферы (на Кербине атмосфера находится ниже 70000 метров). В противном случае корабль начнёт замедляться от трения о воздух, терять горизонтальное ускорение, а значит, упадёт на планету.
Итак, для выполнения такой задачи вам потребуется мощный толчок, который выведет на заданную высоту достаточное количество ускорителей, чтобы в верхней точке задать нужную горизонтальную скорость — просто поверните ракету на девяносто градусов (вне атмосферы это сделать куда проще) и дайте тягу. На карте вы сможете наблюдать, как дуга вашей траектории растягивается, постепенно охватывая всю планету.

Тут стоит поговорить о том, что ракета должна стартовать вертикально, чтобы пробить плотные слои атмосферы, где сопротивление воздуха велико, но позже переходит в горизонтальное состояние. Чем плавнее будет этот переход, тем больше топлива можно сэкономить, поскольку в случае постоянного вертикального разгона сила гравитации действует в строго противоположную разгону сторону, а значит, наименее эффективно преодолевается. Когда аппарат начинает заваливаться в сторону, потери становятся меньше, так как вектор приложения силы теряет меньше чистой скорости, расплачиваясь углом подъёма (если сложить векторы силы притяжения и ускорения ракеты от двигателя, то итоговый вектор получится тем длиннее, чем меньше угол между векторами, однако, поскольку нам нужно как минимум не снижаться, лучшее ускорение – вдоль поверхности). Поскольку для формирования орбиты нам нужна определённая инерция, являющаяся следствием именно скорости, выгоднее будет наклонять траекторию взлёта ракеты в процессе подъёма, и чем раньше это позволит сопротивление воздуха, тем лучше.
Когда орбита стабилизирована, нужно вернуться обратно. Не пытайтесь направлять аппарат напрямую к земле, это приведёт к слишком медленному для достижения поверхности сужению орбиты! Чтобы посадить ракету, вам проще сделать так, чтобы тяготение взяло верх над горизонтальной скоростью, и тогда корабль упадёт не за горизонт, а на поверхность. Просто развернитесь против вектора движения, включите тягу, уменьшая свою горизонтальную скорость, и готовьтесь раскрывать парашют. Температуры после такого будут уже нешуточные, скорости тоже, и проще всего будет сажать только сам командный отсек.
Поздравляю, вы достигли уровня 1961 года, в котором в СССР был выведен на орбиту первый человек. О нём вы, конечно, слышали.
Первые космические манёвры.
Немного про Кеплера, много про авиагоризонт
Когда наш аппарат уверенно выходит на орбиту и возвращается с неё, мы сможем выполнять задания по выведению спутников на конкретные орбиты. Вместо командного блока на спутник нужно поставить автоматический узел связи, который и будет управлять кораблём под нашим руководством.
В этом случае система SAS командного модуля будет отключена за отсутствием оного, и нам нужно будет также поставить внешний маховик, чтобы маневрировать в космосе. Для поддержания контроля за спутником нужна энергия, а значит, стоит установить на корабль солнечные панели, позаботившись о том, чтобы на них попадал солнечный свет и они не были перекрыты другими деталями корабля. Это очень важно, поскольку мы часто будем вращать корабль, и нам нужно иметь возможность пополнять запасы энергии вне зависимости от направления либо тщательно следить за тем, чтобы при дрейфе в космосе панели были повёрнуты к солнцу.
Также стоит опасаться того, что какое-либо небесное тело закроет нам сигнал с Кербина, и наш аппарат станет неуправляемым (например, пролетая по экваториальной орбите луны, часть дуги он будет описывать именно в этом состоянии). И наконец, если вы хотите, чтобы спутник что-то передавал, на него стоит поставить специальные антенны для передачи научных данных, а также приборы для считывания этих данных.
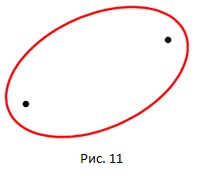
Когда проектирование завершено, самое время приступить к достижению нужной орбиты. Но для осознания этого процесса нам понадобится первый закон Кеплера. Сам Кеплер говорил о планетах и их вращении, но те же законы распространяются и на наш скромный космический аппарат, когда у того выключены двигатели. Итак, немного перефразируя первый закон, орбита вращения одного тела вокруг другого представляет собой эллипс, в одном из фокусов которого и находится облетаемое тело. Эллипс — это окружность, построенная вокруг двух точек, называемых фокусами, так, что суммарное расстояние до фокусов в каждой её точке одинаково (рис.11).
В данном случае мы будем вращаться вокруг планеты. В техзадании чётко указана орбита, которую мы должны занять. Поскольку планета находится в одном из фокусов эллипса, она будет в любом случае лежать на одной плоскости с любым таким эллипсом, а значит, будет на одной плоскости с любой возможной орбитой. Выходит, когда мы вывели на орбиту спутник, половина работы уже сделана, ведь один фокус наших орбит автоматически совпал. Остаётся совместить остальное. Сейчас нам придётся воспользоваться авиагоризонтом (navball). Чтобы не останавливаться на нём позже, давайте разберёмся с его легендой сразу (рис.12).


На авиагоризонте обозначены: Направление (prograde) и возвращение (retrograde). Они задают ось направления движения корабля. Тяга по направлению движения увеличит нашу скорость без изменения вектора, тяга возвратная (т.е. против направления), напротив, уменьшит скорость. Нормаль (normal) и антинормаль (anti-normal) указывают ось, перпендикулярную плоскости орбиты. Тяга по нормали увеличит наклонение орбиты по часовой стрелке, по антинормали — против часовой. Внутрь орбиты (radial in) и вне орбиты (radial out) задают ось, идущую к центру нашей орбиты. Внутрь — это направление к центру, в радиус орбиты орбиты. Наружу, соответственно, вовне, от центра. Тяга внутрь орбиты будет наклонять её радиус по вращению, тяга наружу, напротив, против вращения. Более наглядно направления указаны на рис. 13.
В случае, если мы уже наметили манёвр, на авиагоризонте показывается направление манёвра (maneuver prograde) — метка, показывающая направление, в котором нам нужно ускоряться согласно помеченному заранее на карте плану. Также при применении данной опции рядом будет показано, какую скорость нужно добрать и через какое время мы достигнем точки запланированного манёвра.
Если мы выберем целью произвольный объект в космосе, также появятся маркеры к цели (target) и от цели (antitarget), они строят ось между центром массы нашего корабля и центром массы этого объекта. Прямое движение к цели и от цели мы будем использовать тогда, когда орбиты нашего корабля и цели почти совпали. Тяга к цели или от цели будет означать приближение или, соответственно, удаление от выбранного объекта.
Итак, начнём совмещать орбиты. Начнём с плоскости в целом. Найдём прямую, в которой плоскости нашей и желаемой орбит пересекаются (как мы уже знаем, у наших плоскостей есть общая точка в виде планеты, через неё-то и будет проходить такая прямая). На карте эта линия обозначается пунктиром, а если вы будете просчитывать совмещение орбит в реальности, то просто взгляните на плоскости орбит с точки, с которой обе они будут выглядеть как прямые (т.е. сбоку, как на рис. 14).
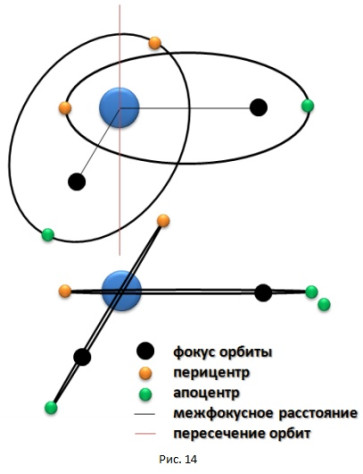
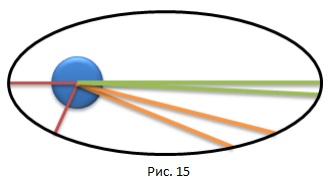
Через точку их пересечения вдоль нашего взгляда и будет проходить искомая линия. Она пересекает орбиту нашего корабля в двух точках, которые называются восходящей (ascending) и нисходящей (descending) и тоже отмечаются на карте. Находясь в любой из этих точек, нам нужно ускоряться по нормали или антинормали в зависимости от того, какой из углов меньше, пока орбиты не станут находиться в одной плоскости. После этого нужно совместить направление между фокусами нашей орбиты и искомой. Это необязательный манёвр и им вполне можно пренебречь, если целевая орбита почти круглая, но если она сильно вытянута, проще будет сначала поработать с межфокусным направлением. Для этого найдите две точки: максимально удалённую от тела, вокруг которого мы вращаемся, и максимально приближенную. Они называется апоцентром (apoapsis) и перицентром (periapsis) соответственно и тоже отмечены на карте. Прямая, проходящая через них, и будет направлением между фокусами. Мысленно продлите её и найдите точки, в которых эта прямая пересекает орбиту нашего корабля. Находясь в той точке, дайте тягу внутрь орбиты или вне её в зависимости от положения её радиуса относительно радиуса целевой орбиты. Теперь осталось скорректировать скорости вращения на текущих апоцентре и перицентре. Оказавшись на одной из этих точек, посмотрите на противоположную относительно тела, вокруг которого вы вращаетесь, точку целевой орбиты. Если она находится вне вашей орбиты, то дайте тягу по направлению движения, если внутри, то возвратную тягу и подождите, пока орбиты в этой точке не совместятся. Опишите полуоборот и повторите.
Спасение неутопающих и полёты без кораблей.
О встречах в космосе и ещё немного о Кеплере
Наигравшись с изменением орбит, можно начинать пополнять команду астронавтов. Но не будете же вы нанимать их, когда там, в космосе, висят добровольцы, ещё и приплатить готовые за своё спасение? Значит, этим мы и займёмся. Выберите миссию по спасению, будем оказывать помощь.
Понадобится нам для этого свободное место на корабле. Можно использовать в дополнение к обычной кабине специальные модули для пассажиров, тогда корабль будет немного тяжелее сажать, потребуются подпорки и дополнительные парашюты, а может, даже тепловой щит, который нужно располагать в нижней, особо разогревающейся части корабля. Или можно просто сделать спутник, на который поставлена пустая кабина. Сначала выберите спасаемого космонавта целью на карте (иногда потребуется сбрасывать цель, если нам нужно совершить манёвр относительно планеты) и выйдите на его орбиту, как вы делали это раньше. Однако если ваш спасательный челнок так и будет вращаться на одной орбите с терпящим бедствие, они никогда не встретятся, а если ускориться, орбита просто растянется. Что же делать?
Тут нам пригодится второй закон Кеплера. Он гласит, что за равные промежутки времени радиус-вектор, соединяющий планету/спутник и тело на орбите, описывает равные площади. Проще говоря, если представить себе, что отрезок, соединяющий наш корабль и планету, делит орбиту на сектора через равные промежутки времени, то эти сектора будут одинаковыми по площади. Из этого можно сделать несколько важных выводов. Во-первых, выходит, что чем больше площадь и протяжённость орбиты, тем больше времени уходит на её прохождение. Во-вторых, чем ближе мы находимся к облетаемому объекту, тем быстрее мы движемся. Значит, если увеличить нашу скорость, то увеличится и орбита, и время её прохождения (за счёт падения скорости с другого края орбиты). Давайте рассинхронизируем челнок и спасаемого, увеличив скорость относительно планеты (если челноку надо догнать его, а не наоборот, то скорость нужно уменьшать, однако следите за тем, чтобы не провалиться в атмосферу). Итак, через несколько оборотов расстояние между ними сократится. На карте будут указаны точки пересечения (intersect) и расстояние между нашими объектами в этих точках. Нам нужно добиться точности, при которой мы сойдёмся менее чем в двух километрах (а желательно в пределах полукилометра).

На самый крайний случай помните, что если не получается достигнуть высокой точности, то мы всегда можем несколько рассинхронизировать орбиты манёвром внутрь или вне орбиты, и наша система планирования подскажет, при каком манёвре расстояние будет меньше всего. Такой метод, однако, требует некоторой практики, поскольку в случае промаха придётся восстанавливать орбиты. Впрочем, если вы окажетесь в десяти или двадцати километрах друг от друга, то скорректировать это расстояние достаточно просто. Когда точка пересечения найдена, нам остаётся только подождать, пока наши корабли встретятся в ней. Именно тогда нам и дадут контроль над терпящим бедствие астронавтом (расстояние должно быть меньше двух километров!). Оказавшись в этой точке, синхронизируйте скорости, выбрав его корабль в качестве цели на карте и задавая возвратную тягу, пока разница скоростей не приблизится к нулю. Теперь ваши орбиты почти совпали, и можно начать процедуру спасения. Переключитесь на астронавта и выйдите в открытый космос. В каждый скафандр вмонтирована реактивная система управления, или RCS. Включите её.
Она состоит из маленьких реактивных двигателей, работающих на сжатом газе. Такие системы ставятся и на корабли и служат для перемещения их в пространстве без изменения направления либо, напротив, для изменения направления без изменения скорости. Симметрично расположенные сопла при этом ставятся так, чтобы иметь возможность направить тягу по любой оси и при этом находиться как можно дальше от центра массы. Если мы хотим сдвинуться, скажем, вперёд, то активируются верхний и нижний двигатель, компенсируя вращение вокруг своей оси друг от друга. Такие системы мы позже будем использовать в аналогичных ситуациях, чтобы стыковать корабли, и действия будем совершать те же самые. В данный момент RCS скафандра уже поставлена и настроена. Обратите внимание, что пробел позволяет развернуть и стабилизировать корабль или космонавта в направлении взгляда, это очень удобно.
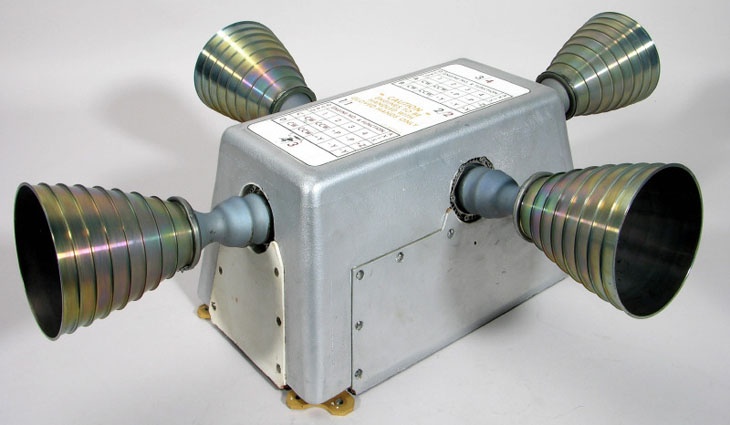
Так выглядит RCS в реальности.
Итак, недалеко парит спасательный челнок. Проверьте скорость относительно него, выбрав его целью. Если эта скорость почти равна нулю, всё хорошо, если нет, то скомпенсируйте её возвратной тягой. Теперь дайте тягу к цели (это проще всего делать, просто развернувшись к ней лицом). Наша отметка направления должна при этом совпасть с отметкой цели, показывая, что мы движемся прямо на неё. если это не так, скорректируйте прямым ускорением вверх/вниз или влево/вправо (RCS предоставляет нам такую возможность). Наша скорость относительно корабля выросла, но так и должно быть, мы сближаемся. Не стоит увлекаться, чтобы успеть замедлиться перед кораблём. Когда остаётся небольшое расстояние, дайте тягу от цели, чтобы затормозить. Взгляните, с какой стороны расположена дверь. Если она с обратной стороны нашего корабля, то давайте тягу напрямую вверх/вниз или влево/вправо, стараясь держаться к кораблю лицом. Когда люк находится прямо напротив, дайте тягу вперёд и на очень небольшой скорости войдите в корабль. Теперь осталось только его посадить, что не составит труда, если конструкция собрана хорошо и у вас осталось топливо.
Орёл приземлился.
Про роверы и перспективы.
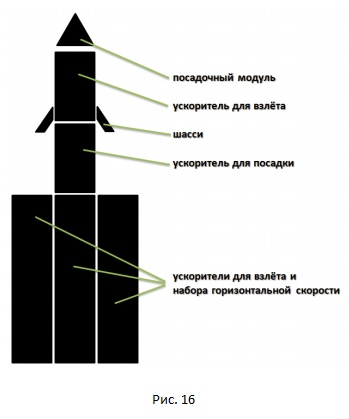
Собрав приличный экипаж, можно начать лунную экспедицию. При ваших знаниях орбитальной механики облететь луну и вернуться будет довольно просто, поэтому мы сразу займёмся посадкой и возвратом. Для такого задания хватит исследованных технологий четвёртого уровня, но лучше, если на корабле будут стоять двигатели помощнее. К нашему командному модулю присоединим топливный бак и двигатель, чтобы взлететь с луны и направиться к Кербину. Чтобы сесть на луну, прикрепим шасси (здесь возможны варианты установки шасси на разные ступени ракеты, но мы рассмотрим самый простой вариант). Достаточно простой треноги. Поскольку приземление будет вертикальное, нужно убедиться, что наш корабль с баком и двигателем не слишком высокий, иначе при посадке, особенно на наклонной местности, слишком легко завалить его на бок. Снизу к этому надо присоединить ещё один жидкотопливный носитель, которым придётся тормозить, опускаясь на луну. И, наконец, для выведения этого на орбиту земли и увеличения скорости на орбите нужны мощные ускорители, дающие нам первоначальный толчок. Должно получиться нечто, напоминающее конструкцию на рис. 16.
Если хотите, можете также попробовать посадить ракету, на которой будет установлен лунный ровер для ваших космонавтов. Негоже топать по луне пешком.
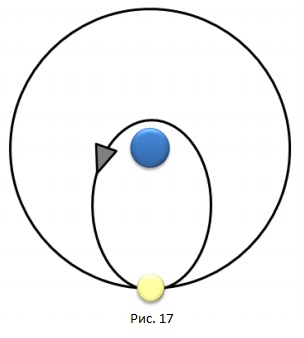
Когда всё будет готово, выведите аппарат на орбиту. Если мы, находясь на орбите, ускоримся, то противоположная точка орбиты будет отдаляться от нас. Отдалите её настолько, чтобы она пересекла или коснулась орбиты луны (см. рис. 17). Поскольку наш космодром находится на экваторе, а луна на экваториальной орбите, наклонение менять нам не понадобится.
Теперь есть несколько вариантов. Можно просто подождать, пока траектории луны и корабля встретятся. Это сэкономит топливо, но грозит тратой времени. Если же топлива хватает, а в луну никак не попасть, придётся тягой внутрь или вне орбиты изменить траекторию так, чтобы всё же встретиться (эти манёвры уже использовались при встрече кораблей на орбите, просто на этот раз совмещать орбиты с луной затратно и потому не нужно, но принцип не меняется). Точное попадание на сей раз не обязательно, достаточно подлететь настолько близко, чтобы гравитационное поле луны стало сильнее, чем Кербина.
Зона притяжения луны условна, поскольку в реальности на ракету будут воздействовать силы притяжения всех крупных объектов пропорционально их удалённости, но в игре ведётся просчёт относительно только одного тела, вокруг которого и вращается корабль, поэтому при входе в гравитационное поле нам сразу покажут новую траекторию. Замкнутой она вряд ли будет, ведь инерция заставит быстро выйти и вернуться на орбиту Кербина. Чтобы этого не произошло, нам нужно уменьшить инерцию, а значит, свою скорость относительно луны. Не обязательно делать это резко и прямо на начальной точке траектории, это приведёт к снижению скорости практически до нуля, за чем последует падение на поверхность в точке, которая вполне может оказаться плохо пригодной для посадки или попросту неподходящей для нашей цели.
Падать вслепую стоит при сильной экономии горючего, в иных случаях лучше сбросить скорость так, чтобы перицентр оказался недалеко от поверхности, а потом долететь до него и завершить торможение, получив в итоге стабильную орбиту. Если нам нужно определённое место высадки, то орбиту надо скорректировать так, чтобы она проходила ровно над этой точкой, и почти над ней дать обратную тягу, пока скорость не упадёт до нуля. Нулевая скорость означает, что вы погасили инерцию относительно вращения поверхности, и остаётся только падать вертикально вниз, так и проще прицелиться в нужную точку, и куда проще посадить корабль ровно.
У самой поверхности снова придётся тормозить практически до нуля и отбрасывать баки, оставив треногу и запустив последний двигатель. Им мы заканчиваем торможение. Чем меньше наша скорость, тем меньше вероятность, что что шасси не выдержит вес корабля при посадке.
Можете взять с собой на другую планету или спутник луноход, и тогда впоследствии задания, требующие передачи данных с поверхности, будут выполняться за секунды.
Для взлёта нужно просто дать тягу, и ракета легко выйдет за пределы гравитационного поля луны. Строго говоря, поскольку на тело действуют силы гравитации всех объектов, следует сказать, что притяжение луны ослабнет настолько, чтобы преобладающей гравитационной силой было притяжение планеты, и точно так же удаление от неё повлечёт преобладание гравитационного поля звезды, однако в игре это отражено схематично, поэтому проще говорить об условной зоне воздействия. Однако вне зависимости от различия этих понятий после взлёта с луны мы снова окажемся на круговой орбите Кербина. Теперь нужно замедляться до тех пор, пока траектория полёта не опустится прямо на её поверхность.
Если нам нужно экономить топливо, то это замедление мы можем начать ещё при взлёте с луны, достаточно дождаться момента, когда участок её поверхности, на котором стоит ракета, развернётся против направления движения луны по орбите. Таким образом получится, что при отдалении от поверхности мы также уменьшаем скорость относительно планеты, что позволит уменьшить импульс, нужный для замедления после выхода из гравитационного поля луны, а значит, и сэкономить топливо.
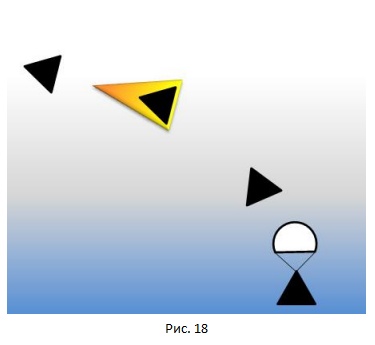
Нужно сказать, что вход в атмосферу будет проходить на очень больших скоростях, а значит, наш посадочный модуль будет встречать сильное сопротивление воздуха и нагреваться об него. Для увеличения сопротивления падать нужно дном против потока воздуха (рис. 18). Маленькая капсула достаточно лёгкая для быстрого торможения, а вот впоследствии, когда мы будем сажать тяжёлые модули, придётся устанавливать на дно специальные тепловые щиты, не дающие перегреть обшивку. Однако именно атмосфера послужит отличным тормозом, замедляя капсулу, пока не станет возможной работа парашюта. При этом надо стараться входить в атмосферу под большим углом, чтобы не попасть в плотные её слои на больших скоростях, а успеть затормозить, не перегрев корабль.
Теперь космическая программа достигла отметки 1969 года, когда США впервые высадили космонавта на поверхность луны, а вы узнали принципы орбитальной механики ровно настолько, чтобы суметь выполнить любую задачу в игре, остальное — дело инженеров.
Что делать дальше — дело исключительно вашей фантазии. Собрать на орбите научную станцию по кусочкам? Отправить на другую планету пятидесятитонный бурильный комплекс? Создать сеть спутников, передающих данные с любой планеты автоматически? Экспериментируйте. Есть масса задач, заслуживающих решения.
Overview
Основные возможности модификации MechJeb, для чайников. Это НЕ подробное описание “от и до”, описаны лишь основные функции, которые позволяют с большим комфортом бороздить космические пространства )
Введение
Что такое MechJeb?
MechJeb – это модификация для игры Kerbal Space Program (далее KSP), позволяющая автоматизировать многие действия в игре такие как взлет, орбитальные маневры, стыковка, посадка. Так же каждое действие “автопилота” поддается тонкой настройке, однако в данном руководстве многие аспекты рассматриваться не будут.
Это автопилот?
Грубо говоря – да. Хотя уместнее назвать его ассистентом, потому что многие действия приходится корректировать т.к. автоматика не делает всего.
Так это же читерство…
Нет – это не читерство, как я уже сказал, многие действия приходится корректировать, для того что бы получить желаемый результат. Модификация позволяет сконцентрироваться на конструировании ракет и исследовании игрового мира не занимаясь пиксель-хантингом при каждом маневре.
Хорошо, и где мне его найти?
Последнюю версию MechJeb можно найти на сайте Curse [mods.curse.com]. Устанавливается как и любая другая модификация, копированием файлов в папку “GameData” в корне игры.
Выглядит очень сложно…
Действительно, модификация – очень мощный инструмент, но мы будем рассматривать основные и самые базовые функции.
Обзорное видео
Сборка ракеты
“Вот верное правило ракетостроения: всегда рассчитывайте на то, что в ходе эксперимента ракета взорвется”
MechJeb начинается с установки на ваш корабль детали под названием MechJeb 2 (AR202 Case), находится во вкладке Command & Control.

Сразу после установки детали на корабль, в правой части экрана появится вкладка MechJeb. Клик на нее открывает список окон которые мы можем открыть. Нас интересует кнопка “Delta-V Stats”.
Откроется окно с информацией о Дельте скорости для вашего крафта. Она позволяет контролировать характеристики вашего аппарата по уму, вместо того что бы ставить больше ускорителей =)
Разберем по порядку
- Total ΔV (atmo/vac) – суммарная дельта скорости вашего крафта в атмосфере и вакууме.
- Stage – Номер ступени
- Start Mass – Стартовая масса для каждой ступени.
- End Mass – Конечная масса для каждой ступени.
- TWR (Тяговооруженность) – Это соотношение, которое определяет мощность двигателей аппарата по отношению к его собственному весу. Для отрыва от земли значение должно быть выше 1.0.
- Max TWR – Максимальное соотношение тяги к весу, которое будет достигнуто в ступени.
- Atmo ΔV – Дельта скорости в атмосфере. На стадии конструирования рассчитывает дельту скорости для высоты 0 м.
- Vac ΔV – Дельта скорости в вакууме.
- Time – Время работы для каждой ступени на максимальной тяге.
Также можно выбрать небесное тело для которого происходят расчеты, для того что бы точно настроить посадочные модули и т.д.
Меню можно настроить под себя.
Собираем простейшие ракеты и смотрим как меняются значения, что бы разобраться как это работает.
“Ну разобрались, дальше то что, ΔV зачем мне?”
Для каждого полета можно рассчитать необходимую Дельту скорости, что бы не тащить лишнего с собой. Например для выхода на орбиту Кербина необходимо ~4550 ΔV, а для полета на Муну и обратно ~7400 ΔV.
Взлет и выход на орбиту
“Если вы сумели выйти на орбиту – вы на пол пути куда угодно”
Вот и наступил первый серьезный момент работы с модификацией.
Я построил корабль соответствующий требованиям выхода на орбиту Кербина и на его примере покажу как это происходит.

Итак, мы на стартовом столе. Нажимаем вкладку MechJeb в правой части экрана, выползает меню, но уже гораздо более обширное. Со всем мы разберемся по порядку, но в свое время. Сейчас же нам нужно открыть окна “Asсent Guidance” и уже знакомый нам “Delta-V Stats”
Разбираемся в Ascent Guidance
Это окно настроек для взлета, совершения гравитационного маневра и выхода на орбиту.
- Orbit Altitude – Высота целевой орбиты.
- Orbit Inclination – Наклонение целевой орбиты.
- Show ascent navball guidance – Создает маркер на навболе в соответствии с заданными настройками гравитационного маневра.
- Engage Autopilot – Запускает процедуру взлета, маневра и выхода на орбиту.
- Prevent OverHeats – Когда включено следит за температурой двигателей что бы те не перегрелись.
- Limit Acceleration to – Когда включено ограничивает ускорение корабля до заданного значения.
- Limit Throttle to – Когда включено ограничивает тягу корабля до заданного значения.
- Corrective Steering – Когда включено выполняет маневр с небольшим упреждением.
- Autostage – Автоматическое срабатывание ступеней. Можно указать задержку срабатывания. Для нестабильных крафтов ее рекомендуется увеличить.
- Auto-deploy Solar Panels – Автоматически выпускает солнечные панели после выхода на орбиту
- Auto-Warp – Когда включено автоматически ускоряет время между маневрами.
- Skip Circualization – Когда включено НЕ округляет орбиту.
- Edit Ascent Path – Открывает окно редактирования гравитационного маневра.
Разбираемся в Edit Ascent Path
В этом окне можно задать необходимую траекторию гравитационного маневра. По умолчанию заданы автоматические значения.
При снятии галочки с автоматических значений можно задать свои.
- Turn Start Altitude – Высота с которой начнется маневр (не рекомендую ставить менее 10 км).
- Turn Start Velocity – Минимальная скорость для начала маневра.
- Turn End Altitude – Высота на котором маневр должен закончиться.
- Final Flight Path Angle – Финальный угол траектории маневра.
- Turn Shape – Плавность траектории маневра.
Итак определились. Наш корабль имеет больше 4550 ΔV необходимых для выхода на орбиту и мы определились с настройками. Выводить корабль будем на 75 км, для этого я ограничу ускорение до 13 м/с, что бы избежать потерь из-за трения об атмосферу, включу Corrective Steering и Autostage, и настрою маневр как на скриншоте. Нам остается только нажать Engage Autopilot.

Есть отрыв!

На 10 км автоматика начинает маневр

На графике маневра видно что мы немного отклонились от заданной траектории, но это не страшно

Срабатывает автоступень

В конце гравитационного маневра автоматика сама создаст точку орбитального маневра и выполнит ее, это финальная стадия – округление орбиты.

Результат работы автоматики. В окне с информацией об орбите видно что высота орбиты 75 км, разница между перицентром и апоцентром всего 108 метров, а наклонение орбиты 0.097 градуса.
Для выхода на орбиту было потрачено 4230 ΔV
После выхода на орбиту необходимо снять галочку с “Limit Acceleration” и “Limit Throttle” если они были включены!
Орбитальные маневры
«Не отягчайте свой полёт мелочами, которые принято называть жизненными потребностями. Помните: утяжелив тело, мы укорачиваем крылья»
Вот мы на орбите, не падаем, отлично. Теперь рассмотрим несколько орбитальных маневров.
Открываем вкладку MechJeb, в этот раз на нужно окно “Maneuver Planner”.
 Рассмотрим 7 маневров.
Рассмотрим 7 маневров.
- Advanced Transfer to Another Planet – Этот пункт рассчитает маневр для трансфера до целевой планеты. Для этого она должна быть выделена как цель. Позволяет добраться до планеты с минимальными затратами ΔV.
- Change Apoapsis – Этот пункт рассчитает маневр для изменения апоцентра орбиты (не создаст точку если заданный апоцентр ниже существующего перицентра).
- Change Inclination – Этот пункт рассчитает маневр для изменения наклонения орбиты.
- Change Periapsis – Этот пункт рассчитает маневр для изменения перицентра орбиты (не создаст точку если заданный перицентр выше существующего апоцентра).
- Сircualize – Этот пункт рассчитает маневр для округления орбиты в заданной точке (перицентр или апоцентр).
- Hohmann Transfer to Target – Этот пункт рассчитает Гомановскую тракеторию. Применяется когда нужно отправиться, например, с орбиты Кербина на орбиту Муны. Работает только в пределах планетарного влияния.
- Return From a Moon – Этот пункт рассчитает маневр возврата с орбиты спутника на орбиту планеты. Целевую высоту можно задать.
Вот мы все потыкали, давайте посмотрим как оно на практике.
Попробуем на нашем корабле слетать к Муне.
Для начала выделим Муну в цель, выберем “Hohmann Transfer to Target” и нажмем “Create Node”. На карте появится запланированный маневр. По умолчанию он рассчитает траекторию так что мы в итоге врежемся в спутник, поэтому немного подкорректируем руками маневр. Должно получиться вот так:
 (Наклонение орбиты надо скорректировать перед выполнением маневром Гомана!)
(Наклонение орбиты надо скорректировать перед выполнением маневром Гомана!)
Для того что бы автоматика начала выполнять маневр надо нажать “Execute Next Node”, после этого корабль нацелится на вектор маневра и автоматически промотает время до его начала и выполнит его с точностью до 0.1 м/с.
(В принципе можно создать любой свой маневр на карте и нажать “Execute Next Node”, автоматика выполнит любой заданный маневр)
 Вот мы выполнили наш запланированный маневр, мотаем время до попадания в сферу влияния Муны
Вот мы выполнили наш запланированный маневр, мотаем время до попадания в сферу влияния Муны
 Мы попали в сферу влияния Муны. Теперь надо затормозить и округлить орбиту. Для этого выбираем “Circualize” задаем точку начала в перицентре и жмем “Create Node”. Проверяем созданный маневр, если все в порядке жмем “Execute Next Node”
Мы попали в сферу влияния Муны. Теперь надо затормозить и округлить орбиту. Для этого выбираем “Circualize” задаем точку начала в перицентре и жмем “Create Node”. Проверяем созданный маневр, если все в порядке жмем “Execute Next Node”
 Вот и все. Орбита закручена. Высота 35 км, разница апоцентра и перицентра всего 342 м, наклонение 178.2 градуса, это означает что мы движемся против вращения Муны. Изменить это можно было на стадии планирования маневра Гомана.
Вот и все. Орбита закручена. Высота 35 км, разница апоцентра и перицентра всего 342 м, наклонение 178.2 градуса, это означает что мы движемся против вращения Муны. Изменить это можно было на стадии планирования маневра Гомана.
Посадка и возвращение
“Не знаю, доказал ли я это всем, но я точно доказал это себе: мы не прикованы к этой планете”
Теперь мы болтаемся на орбите Муны. Следующим шагом станет посадка на нее.
Во вкладке MechJeb открываем окно “Landing guidance”.

Разберемся в “Landing Guidance”
- Target Coordinates – Можно ввести координаты точки посадки.
- Pick Target on Map – Можно выбрать точку посадки на карте.
- Land at Target – Садится в заданной точке посадки (в качестве цели можно также выбрать флаг или другой аппарат на поверхности).
- Land Somewhere – Немедленно начинает процедуру посадки в самом доступном месте.
- Touchdown Speed – Скорость касания с поверхностью.
- Deploy Landing Gear – Когда включено автоматически выставит посадочные ноги.
- Deploy Parachutes – Когда включено автоматически выбросит парашюты.
- Use RCS for Small Adjustment – Когда включено использует RCS для помощи при посадке.
Порой случается так что посадка не срабатывает как надо и ваш корабль разбивается, поэтому крайне рекомендуется сохранять игру перед посадкой!
 Итак, выбираем понравившуюся точку на Муне, сохраняемся и жмем “Land at Target”. Автоматика начнет выполнять маневры БЕЗ планирования, иногда ей приходится совершить пару витков перед тем как начать торможение.
Итак, выбираем понравившуюся точку на Муне, сохраняемся и жмем “Land at Target”. Автоматика начнет выполнять маневры БЕЗ планирования, иногда ей приходится совершить пару витков перед тем как начать торможение.
Игра рассчитывает минимальный расход топлива на посадку, поэтому некоторые маневры могут выглядеть очень опасно, не стоит переживать, автоматика редко ошибается.
 Процесс торможения, синяя точка – расчетное место приземления в данный момент времени учитывая вращение спутника и атмосферы при ее наличии.
Процесс торможения, синяя точка – расчетное место приземления в данный момент времени учитывая вращение спутника и атмосферы при ее наличии.
 Вертикальное торможение
Вертикальное торможение
 Аккуратное касание
Аккуратное касание
 И вот мы на поверхности Муны!
И вот мы на поверхности Муны!
Возвращение
Не будем терять времени и сразу быстренько вернемся на Кербин.
Это не займет много времени.
Сперва надо вернуться на орбиту Муны. Сделать это можно с помощью “Ascent Guidanсe”, но я сделаю это вручную, наберу 20 км высоты и использую “Circualize” в “Maneuver Planner”.
 После выхода на орбиту Муны, осталось только в окне “Maneuver Planner” выбрать “Return from a Moon” и задать целевую высоту, для себя я выбрал 35 км. MechJeb просчитает маневр возврата на планету с точкой касания на высоте 35 км.
После выхода на орбиту Муны, осталось только в окне “Maneuver Planner” выбрать “Return from a Moon” и задать целевую высоту, для себя я выбрал 35 км. MechJeb просчитает маневр возврата на планету с точкой касания на высоте 35 км.
 Как видите у меня осталось 358 м/с ΔV на момент входа в атмосферу. Можно считать что я взял лишний топливный бак. Использую его для дополнительного торможения в атмосфере.
Как видите у меня осталось 358 м/с ΔV на момент входа в атмосферу. Можно считать что я взял лишний топливный бак. Использую его для дополнительного торможения в атмосфере.
 Сброшу мертвый груз после отработки топлива
Сброшу мертвый груз после отработки топлива
 И мягко на парашюте приземлю капсулу на Кербин
И мягко на парашюте приземлю капсулу на Кербин
Стыковка
“То что два объекта смогли встретиться в бесконечности космоса само по себе чудо”
Для того что бы показать вам процесс стыковки в MechJeb я вывел на орбиту Кербина 2 одинаковых аппарата, один из них я поместил на стабильную орбиту на высоте 75 км, а второй на вытянутую орбиту с перицентром в 69 км, апоцентром в 373 км и наклонением в 4.3 градуса.
Прежде чем стыковать аппараты их надо свести в одной точке. Для этого мы используем инструмент “Randezvous Autopilot”. Открыть его окно можно в вкладке MechJeb.
 Это элементарный инструмент, необходимо задать расстояние до второго аппарата на котором мы должны оказаться в конце и максимальное кол-во витков перед достижением цели. Чем меньше витков разрешено, тем больше топлива будет потрачено. Для пуска надо нажать “Engage Autopilot”
Это элементарный инструмент, необходимо задать расстояние до второго аппарата на котором мы должны оказаться в конце и максимальное кол-во витков перед достижением цели. Чем меньше витков разрешено, тем больше топлива будет потрачено. Для пуска надо нажать “Engage Autopilot”
 Автоматика начнет строить маневры, на их выполнение уйдет некоторое время, нам остается только ждать
Автоматика начнет строить маневры, на их выполнение уйдет некоторое время, нам остается только ждать
 В конце концов на карте появляется отметка что объекты будут рядом
В конце концов на карте появляется отметка что объекты будут рядом
 Сближение завершено
Сближение завершено
Следующий этап – стыковка. Для стыковки используем инструмент “Docking Autopilot”.
 Для правильной работы необходимо выбрать целью док-порт второго корабля к которому хотим пристыковаться, а затем кликнуть правой кнопкой по своему док-порту и выбрать “Control From Here” и включить RCS. Все, теперь мы готовы к стыковке. В окне инструмента надо выставить скорость стыковки, запускаем автопилот поставив галочку “Autopilot Enabled”
Для правильной работы необходимо выбрать целью док-порт второго корабля к которому хотим пристыковаться, а затем кликнуть правой кнопкой по своему док-порту и выбрать “Control From Here” и включить RCS. Все, теперь мы готовы к стыковке. В окне инструмента надо выставить скорость стыковки, запускаем автопилот поставив галочку “Autopilot Enabled”
 Финальное сближение
Финальное сближение
 Готово! Теперь наши корабли – одно целое!
Готово! Теперь наши корабли – одно целое!
Межпланетные перелеты
«Чем полет на Марс отличается от полета на Луну? На Луне, где нужно было просто взять пробы грунта, успели побывать несколько экспедиций. А полет на Марс будет эксклюзивным, разовым»
Я создал спутник, который должен картографировать Дюну. Цель: Вывести его на полярную орбиту. Полетим мы на этом корабле.
Межпланетные перелеты это практически то же самое что и перелеты к спутникам Кербина например, разница в том что окна перелета приходится дожидаться долго.
В модификации есть возможность запускать корабль во время окна, но как мне кажется работает она немного не верно, поэтому отмотать время до окна лучше вручную. Посчитать когда оно будет, необходимую траекторию и ΔV для трансфера можно ТУТ[ksp.olex.biz].
Дожидаюсь окна.
 Вывожу аппарат на орбиту в 100 км. В меню MechJeb’а выбираю опцию “Maneuver Planner”, в открывшемся окне выбираем маневр “Advanced Transfer to Another Planet”.
Вывожу аппарат на орбиту в 100 км. В меню MechJeb’а выбираю опцию “Maneuver Planner”, в открывшемся окне выбираем маневр “Advanced Transfer to Another Planet”.
 Перед нами предстает разноцветная диаграмма. Давайте разберемся.
Перед нами предстает разноцветная диаграмма. Давайте разберемся.
С диаграммой все просто, синие области – это момент когда перелет требует наименьшее кол-во ΔV, но для этого придется дожидаться окна, что мы уже сделали, красные области – это момент когда перелет будет требовать большое кол-во ΔV, нам этого не надо.
Двигая мышкой по диаграмме выбираем удобное нам время перелета, клик запоминает этот момент, “Create node” создает маневр с заданными настройками.
Еще пара моментов:
- “Lowest ΔV” – Автоматически выбирает точку с минимальным значением ΔV для перелета
- “ASAP” – As Soon As Possible – Настолько скоро насколько возможно – выбирает наиболее выгодную точку с которой можно стартовать в течение нескольких часов
- “Departure in” – Время до начала маневра перелета
- “Transit Duration” – Время самого перелета
Еще одна важная вещь: Данный инструмент не работает если ваш корабль движется против вращения планеты. В этом случае следует использовать инструмент “Transfer to Another Planet”.
Вернемся к нашему полету. Точка с минимальными затратами ΔV (1051 м/с) у нас будет через 37 дней, я не хочу ждать это время поэтому выберу точку из которой могу стартовать прямо сейчас, но с немного большими затратами ΔV (1189 м/с)
 “Execute next node” начинает маневр.
“Execute next node” начинает маневр.
 В итоге мы получаем траекторию и через определенное время попадем в сферу влияния Дюны с перицентром в 17 млн м.
В итоге мы получаем траекторию и через определенное время попадем в сферу влияния Дюны с перицентром в 17 млн м.
 После выполнения маневра, мотаем время.
После выполнения маневра, мотаем время.
ВНИМАНИЕ: при переходе из одной сферы влияния в другую не мотайте время быстрее х10000, это приводит к неверному пересчету траекторий и они сбиваются.
За некоторое время до сближения с Дюной создаю маневр что бы скорректировать полет так что бы оказаться ближе к полярной орбите.
 Входим в сферу влияния Дюны скругляем орбиту в перицентре
Входим в сферу влияния Дюны скругляем орбиту в перицентре
 Корректируем наклонение до идеальной полярной орбиты
Корректируем наклонение до идеальной полярной орбиты
 И готово, наш спутник находится там где нужно и еще осталось неиспользованное топливо
И готово, наш спутник находится там где нужно и еще осталось неиспользованное топливо

Послесловие
Спасибо что дочитали сие до конца, от себя хотелось бы добавить несколько вещей.
Некоторые моменты настройки маневров я пропустил намеренно, потому что не ставил перед собой цели разобрать модификацию по кирпичикам. Это самые базовые, самые простые, и самые часто-используемые вещи на мой взгляд.
Про стыковку: Несмотря на всю полезность этих инструментов я все же выполняю сближение и стыковку вручную, т.к. мне удается потратить гораздо меньше топлива по сравнению с автоматикой.
Для тех кто играет в карьерном или научном режиме!
Каждый инструмент открывается после исследования определенной технологии. Что именно открывается можно посмотреть в информации о модулях технологии в окне исследований.

Все описанное было проделано на версии KSP 1.1 и Mechjeb 2.5.7.
ВНИМАНИЕ! Перед тем как спрашивать “а почему то не работает и это” рекомендую проверить правильность работы мода с помощью моего тестового крафта, скриншоты настроек автопилота приложены. Актуально для KSP 1.3 и MechJeb 2.6.1
[link] yadi .sk /d/QgenPOGr3KZNcH (Пробелы убрать)
View post on imgur.com
(Скриншоты настроек)
Больше информации по ΔV вы можете найти на вики по игре[wiki.kerbalspaceprogram.com]
Диаграмма[wiki.kerbalspaceprogram.com] показывающая необходимое количество ΔV от/до Кербина
Сохраняйтесь почаще, удачных полетов!
![]()
Download Article
![]()
Download Article
Have you been trying to get into orbit for ages but lacked the know how? Do you want to finally be able to fall towards Kerbin for an eternity? No? Oh… well, this is awkward……but this will tell you anyway.
Steps
-

1
Know what an orbit really is. Getting to space and getting to orbit are two very different things. Getting to space means you simply leave Kerbin’s atmosphere by going above 70 kilometers (43 mi). Getting to orbit involves gaining appropriate lateral velocity (speeding up side-ways) while also propelling yourself vertically.
-
2
Design a ship capable of reaching orbit. Everyone has their own style of ship-building; where one persons rocket may have 20 elaborate stages, another players ship may only have two stages and still be able to get just as high an orbit. Try playing around with a few stock ships and ships from the forums. If you find a design you like, adapt it to suit your style and/or needs.
Advertisement
-
3
Try breaking the design down into 3 main stages or sections. The first being the boost stage. This stage is your least efficient stage with the most power and biggest rockets. The ‘Mainsail’ engine or the �LV-T45 for a small rocket would be perfect. Solid rocket boosters also provide high thrust but remember that you can’t turn them off! Your transfer stage should kick in as you approach the 900m/s mark when you are almost tilted over towards the horizon. This will push your apoapsis up to around 70–100 kilometers (43–62 mi). Your third stage or orbital module should be used only to circularise your orbit and de-orbit and an LV-909 or Poodle engine attached to a small fuel tank (like the FL-T400 or X200-16) will be fine.
-
4
Keep ‘Delta-V’ in mind. ‘Delta-V’ means ‘Change in velocity’ and is measured in m/s. Your delta-V is linked with the fuel capacity, weight and efficiency of your rocket. You will need around 4500m/s (4700m/s with safety margin) Delta-V to get to orbit around Kerbin. To find how much Delta-V your rocket has, use this formula: (http://wiki.kerbalspaceprogram.com/wiki/Cheat_Sheet#Delta-v_.28.CE.94v.29)
-
5
Get in the mindset. Ok, to do this you are going to need to think big. KSP is not for the faint of heart, It’s a giant universe out there, get ready for it!
-
6
Launch your rocket. At this stage you simply want it to go straight up until you reach an altitude of 10 kilometers (6.2 mi) Consider turning SAS on and keeping your thrust at 2/3rds for lighter rockets. (depending on the weight of the rocket). Obviously, some rocket designs will require full thrust at launch, it is simply good practice to not exceed terminal velocity so that you don’t waste fuel. Speed should be 120m/s at 1 kilometer (0.62 mi) and let it slowly increase
-
7
Perform your ‘Gravity Turn’. The gravity turn is the manoeuvre that will start giving you lateral velocity. You will want to tilt over to about 45 degrees east(right), this angle will allow your craft to continue to rise into the skies while gaining that needed lateral velocity. It is always good practice to launch your rockets into an anti-clockwise orbit (an eastward gravity turn) as this will let the planets rotational velocity add to your orbital velocity.
-
8
Burn till your apoapsis>70 kilometers (43 mi). Your apoapsis is the highest point in your orbit and is marked in the map view by ‘Ap’. you can hover over the marker to see its altitude or you can click on it to see it without having to hover over it. 70 kilometers (43 mi) is the altitude at which Kerbin’s atmosphere ends, if your apoapsis is under this altitude, you will not be able to achieve a stable orbit as friction from the atmosphere will cause your craft to slow down and fall back to the rocky ground.
-
9
‘Coast’ till you reach your apoapsis. ‘Coasting’ just means ‘hit the time warp!’. You will want to warp to your apoapsis for your next burn.
-
10
Perform your circularization burn. At this point you will be changing your sub-orbital trajectory into an orbital trajectory. You will do this by pointing ‘Pro-Grade’ and burning till your periapsis>70 kilometers (43 mi).
-
11
Enjoy the view! If you have followed these steps correctly, you should be looking at a rather round planet! Well done!
-
12
Remember to come back home, point the ship with WASD at the retrograde marker, the yellow circle with the cross through it(against your direction of travel) and burn until your periapsis is below about 20 kilometers (12 mi).












Advertisement
Add New Question
-
Question
How can I stop my rocket from spinning out?

Try adding wings or fins near the bottom, top, or both ends of your rocket. Be sure to add an appropriately sized SAS module somewhere on your rocket, likely near or conected to the command pod or probe and enable it with T. If you suddenly spin out during this, try not to move too much during liftoff, or it’s possible you’ve ran out of electric charge. Try changing your design if it continues to be a problem.
-
Question
Should I add solar panels to the actual rocket if I am going somewhere like the moon?
Or RTG’s, but solar panels are preferred. Remember to add batteries as well.
-
Question
When do I preform the turn and how long do I keep the turn? Also, how do I stop my apoapsis from growing in space?
It depends on the drag, thrust, and mass of your vessel. You continue the turn until you achieve orbit. To stop your apoapsis from growing, you stop burning prograde.

Ask a Question
200 characters left
Include your email address to get a message when this question is answered.
Submit
Advertisement
-
Periapsis — Lowest point in an orbit (Marked by Pe in map view)
-
Apoapsis — Highest point in an orbit (Marked by Ap in map view)
-
Pro-Grade — To point Pro-Grade is to point in the direction of travel. pro-grade is indicated on the nav-ball by a yellow marker (without a cross through it)
Show More Tips
Thanks for submitting a tip for review!
Advertisement
-
This may take several attempts, don’t get upset if you can’t get it first, second or 25th time. Just keep at it!
-
Keep an eye on your apoapsis in map view as you make you circularization burn, if it goes too far ahead of you, tilt down. if it goes too far behind you, tilt up. You want your apoapsis to be right on top of you till the moment you get your periapsis above 70 kilometers (43 mi)
Advertisement
Things You’ll Need
- Space
- A Planet
- A Rocket
- Kerbal(s) (optional)
About This Article
Thanks to all authors for creating a page that has been read 159,060 times.
Did this article help you?
![]()
Download Article
![]()
Download Article
Have you been trying to get into orbit for ages but lacked the know how? Do you want to finally be able to fall towards Kerbin for an eternity? No? Oh… well, this is awkward……but this will tell you anyway.
Steps
-
1
Know what an orbit really is. Getting to space and getting to orbit are two very different things. Getting to space means you simply leave Kerbin’s atmosphere by going above 70 kilometers (43 mi). Getting to orbit involves gaining appropriate lateral velocity (speeding up side-ways) while also propelling yourself vertically.
-
2
Design a ship capable of reaching orbit. Everyone has their own style of ship-building; where one persons rocket may have 20 elaborate stages, another players ship may only have two stages and still be able to get just as high an orbit. Try playing around with a few stock ships and ships from the forums. If you find a design you like, adapt it to suit your style and/or needs.
Advertisement
-
3
Try breaking the design down into 3 main stages or sections. The first being the boost stage. This stage is your least efficient stage with the most power and biggest rockets. The ‘Mainsail’ engine or the �LV-T45 for a small rocket would be perfect. Solid rocket boosters also provide high thrust but remember that you can’t turn them off! Your transfer stage should kick in as you approach the 900m/s mark when you are almost tilted over towards the horizon. This will push your apoapsis up to around 70–100 kilometers (43–62 mi). Your third stage or orbital module should be used only to circularise your orbit and de-orbit and an LV-909 or Poodle engine attached to a small fuel tank (like the FL-T400 or X200-16) will be fine.
-
4
Keep ‘Delta-V’ in mind. ‘Delta-V’ means ‘Change in velocity’ and is measured in m/s. Your delta-V is linked with the fuel capacity, weight and efficiency of your rocket. You will need around 4500m/s (4700m/s with safety margin) Delta-V to get to orbit around Kerbin. To find how much Delta-V your rocket has, use this formula: (http://wiki.kerbalspaceprogram.com/wiki/Cheat_Sheet#Delta-v_.28.CE.94v.29)
-
5
Get in the mindset. Ok, to do this you are going to need to think big. KSP is not for the faint of heart, It’s a giant universe out there, get ready for it!
-
6
Launch your rocket. At this stage you simply want it to go straight up until you reach an altitude of 10 kilometers (6.2 mi) Consider turning SAS on and keeping your thrust at 2/3rds for lighter rockets. (depending on the weight of the rocket). Obviously, some rocket designs will require full thrust at launch, it is simply good practice to not exceed terminal velocity so that you don’t waste fuel. Speed should be 120m/s at 1 kilometer (0.62 mi) and let it slowly increase
-
7
Perform your ‘Gravity Turn’. The gravity turn is the manoeuvre that will start giving you lateral velocity. You will want to tilt over to about 45 degrees east(right), this angle will allow your craft to continue to rise into the skies while gaining that needed lateral velocity. It is always good practice to launch your rockets into an anti-clockwise orbit (an eastward gravity turn) as this will let the planets rotational velocity add to your orbital velocity.
-
8
Burn till your apoapsis>70 kilometers (43 mi). Your apoapsis is the highest point in your orbit and is marked in the map view by ‘Ap’. you can hover over the marker to see its altitude or you can click on it to see it without having to hover over it. 70 kilometers (43 mi) is the altitude at which Kerbin’s atmosphere ends, if your apoapsis is under this altitude, you will not be able to achieve a stable orbit as friction from the atmosphere will cause your craft to slow down and fall back to the rocky ground.
-
9
‘Coast’ till you reach your apoapsis. ‘Coasting’ just means ‘hit the time warp!’. You will want to warp to your apoapsis for your next burn.
-
10
Perform your circularization burn. At this point you will be changing your sub-orbital trajectory into an orbital trajectory. You will do this by pointing ‘Pro-Grade’ and burning till your periapsis>70 kilometers (43 mi).
-
11
Enjoy the view! If you have followed these steps correctly, you should be looking at a rather round planet! Well done!
-
12
Remember to come back home, point the ship with WASD at the retrograde marker, the yellow circle with the cross through it(against your direction of travel) and burn until your periapsis is below about 20 kilometers (12 mi).
Advertisement
Add New Question
-
Question
How can I stop my rocket from spinning out?
Try adding wings or fins near the bottom, top, or both ends of your rocket. Be sure to add an appropriately sized SAS module somewhere on your rocket, likely near or conected to the command pod or probe and enable it with T. If you suddenly spin out during this, try not to move too much during liftoff, or it’s possible you’ve ran out of electric charge. Try changing your design if it continues to be a problem.
-
Question
Should I add solar panels to the actual rocket if I am going somewhere like the moon?
Or RTG’s, but solar panels are preferred. Remember to add batteries as well.
-
Question
When do I preform the turn and how long do I keep the turn? Also, how do I stop my apoapsis from growing in space?
It depends on the drag, thrust, and mass of your vessel. You continue the turn until you achieve orbit. To stop your apoapsis from growing, you stop burning prograde.
Ask a Question
200 characters left
Include your email address to get a message when this question is answered.
Submit
Advertisement
-
Periapsis — Lowest point in an orbit (Marked by Pe in map view)
-
Apoapsis — Highest point in an orbit (Marked by Ap in map view)
-
Pro-Grade — To point Pro-Grade is to point in the direction of travel. pro-grade is indicated on the nav-ball by a yellow marker (without a cross through it)
Show More Tips
Thanks for submitting a tip for review!
Advertisement
-
This may take several attempts, don’t get upset if you can’t get it first, second or 25th time. Just keep at it!
-
Keep an eye on your apoapsis in map view as you make you circularization burn, if it goes too far ahead of you, tilt down. if it goes too far behind you, tilt up. You want your apoapsis to be right on top of you till the moment you get your periapsis above 70 kilometers (43 mi)
Advertisement
Things You’ll Need
- Space
- A Planet
- A Rocket
- Kerbal(s) (optional)
About This Article
Thanks to all authors for creating a page that has been read 159,060 times.
Did this article help you?
- Флагштоком для изменения флага,
Для доступа к структуре — просто кликните на ней.

Рис. 4: Первоначальная страница Космического Центра Кербала.
Ракета!
Так как нам нужна ракета, выбираем среднее здание — это Vehicle Assembly Building (здание вертикальной сборки, ЗВС). Здесь мы начнём нашу первую ракету, используя уже готовый, заводской (стоковый) экземпляр.

Нажав на значке жёлтой папки в верхнем правом углу, появится меню как на рисунке 5. Найдём и выберем Kerbal X (stock). Это загрузит готовую ракету, Kerbal X. Она очень проста и может легко выйти на орбиту вокруг планеты. Если Вы используете демо версию, то здесь есть пример простой ракеты, подобной Kerbal X.

Хотя эта ракета кажется немного сложной, на самом деле она достаточно лёгкая в понимании устройства. С правой стороны экрана, показанного на рисунке 6, есть пронумерованные оранжевые папки от 0 до 8. Это этапы запуска, которые есть у этой ракеты. Это не тоже самое, что ступени ракеты. При каждом нажатии пробела происходит переход к следующему этапу. Каждый этап имеет как минимум одну иконку внутри. Это события этого этапа. Таким образом, этапы запуска для данной ракеты следующие:
Хотя Kerbal X вполне самодостаточная ракета, рекомендуем добавить пару элементов, которые сделали бы выход на орбиту немного легче.

Рисунок 7 показывает, что основная ступень ракеты отсоединена для возможности добавить чёрный SAS модуль из вкладки Control. Чтобы «разобрать» ракету в правильном месте, просто наведите мышь на секцию ниже переходника, черно-жёлтое кольцо с красным треугольником, и щёлкните левой кнопкой мыши (ЛКМ) раз. Это выберет топливный бак под переходником и всё, что ниже этой секции. Затем просто передвиньте в сторону, но не на серое окно выбора компонентов слева (иначе выделенная секция удалится), и щёлкните ЛКМ ещё раз,чтобы оставить секцию там.
Модуль SAS значительно помогает сохранить курс Вашей ракеты без лишнего вмешательства с Вашей стороны. С установленным SAS модулем, нажатие клавиши «t», после того как ракета установлена на стартовом комплексе, позволит держать курс ракеты в нужных пределах, пока она летит. Есть и другие варианты для поддержания стабильности курса ракеты, но о них будет сказано позже.

Рис. 8: SAS модуль добавлен к основной ступени ракеты
Чтобы добавить SAS модуль, щёлкните ЛКМ на чёрном SAS модуле, затем наведите курсор к секциям ракеты. Там должна появиться проекция SAS модуля, следующая за курсором. Если нет, то просто вернитесь назад и снова выберите SAS модуль ЛКМ. Далее перетащите его к основанию переходника и увидите как проекция SAS модуля стала зёленой когда он правильно расположен. Ещё раз ЛКМ, и модуль будет помещён снизу переходника, как показано на рисунке 8. Последним шагом является подсоединение нижней секции обратно под SAS модуль. Это делается также как и отсоединение, только в обратном порядке.

Ещё один SAS модуль может быть добавлен к секции сразу под капсулой. Просто повторите тот же процесс с переходником, что находится под капсулой. Если же ещё под SAS модуль добавить бак RCS, рисунок 9, то это также будет способствовать поддержанию стабильности ракеты в полёте. Активируется нажатием «r». Чтобы это работало, необходимо добавить RCS двигатели к переходнику как на рисунке 10. Используйте иконку симметрии в нижнем левом углу экрана (рисунок 11) или клавишу «x», чтобы добавить двигатели с использованием любой симметрии. Каждое нажатие ЛКМ по иконке (или клавиши «x») будет перебирать по очереди все варианты симметрии, то есть 1 — 8 копий, размещённых симметрично независимо от детали, которую Вы ставите.

Рис. 10: RCS двигатели добавлены к переходнику под капсулой

После того как все части ракеты снова соединены вместе, самое время переместить ракету на стартовый комплекс. Возвращаясь к рисунку 5, стартовый комплекс — это зелёная иконка в правом верхнем углу экрана. ЛКМ по ней переместит ракету на стартовый комплекс.
Запуск ракеты
После того как Вы сделали или выбрали ракету, нажмите на большую зелёную кнопку с изображением ракеты в верхнем правом углу.
Управление полётом не совсем просто. W,S,A и D передвигают корабль по двум осям, но это относительно Вашего вращения, контролируемого с помощью Q и E. Самый простой способ сохранять курс с WASD — это смотреть на т.н. Navball, шарик снизу посередине экрана.
Прежде чем запустить ракету, посмотрите на карту (клавиша M). Вы увидите Кербин. Уменьшите масштаб с помощью колёсика мыши, чтобы увидеть спутники Кербина, и ещё больше, чтобы увидеть всю систему сразу. Потребуется достаточное время прежде чем Вы поймете как построить ракету, которая сможет покинуть сферу влияния [[Kerbin/ru|Кербина], поэтому экспериментируйте с разными конструкциями ракет и смотрите, что лучше для Вас.
Запуск Вашей ракеты самая простая часть. Просто нажмите пробел. Но прежде нажмите T, чтобы включить SAS. SAS — это по сути автопилот, без которого всё будет не так хорошо. Простой SAS позволяет Вам управлять движением ракеты с помощью клавиш WASDQE быстрее и с большей мощностью, однако это ничто по сравнению с ASAS (Advanced SAS). Advanced SAS позволяет Вашей ракете использовать управление вектором тяги (отклонение струи газа, помогает с вращением в космосе при включённом двигателе) и он сохраняет курс сам, Вам не нужно это делать вручную.
Каждый раз как у Вас заканчивается топливо на этапе, нажимайте «пробел». Это активирует следующий этап запуска и включит следующие двигатели.
Вкратце: перед запуском нажмите T, затем нажмите пробел для запуска и, если Ваша ракета прекращает движение, снова нажимайте пробел.
Выход на орбиту
Немного полезной информации о ступенях:
Ступень запуска (Разгонный блок)
В ней обычно находятся мощные двигатели и ТРД. Главная задача при конструировании — заложить в эту ступень как можно больше, ведь она не отправится с Вами в космос.
Остальные ступени
В основном под ними имеются в виду:
- Ступень скругления орбиты;
- Ступень межпланетных перелётов и т.д.
Главное: Эти ступени используются уже в космосе, поэтому они должны быть лёгкими, средней мощности или маломощные.Как только Ваша ракета вышла в космос, наиболее подходящими двигателями являются LV-N (ЯРД), LV-909 или Rockomax «Poodle».
Как установить круговую орбиту
Внимание! Дальнейшая информация рассказывает только о двух способах установить круговую орбиту. Не бойтесь экспериментировать со способами.
При взлете (и после него) ракета должна располагаться вертикально (не забудьте включить SAS!). На высоте примерно 10 — 15 км нужно, выключив SAS, постепенно и очень плавно наклонить корабль в сторону будущей орбиты (лучшим вариантом является наклон вправо (в сторону вращения планеты)) на 80 — 90 градусов. Во время наклона Prograde marker (зеленый кружок на Navball) сместится в сторону наклона. Следите, чтобы он не «упал» за горизонт (оказался в коричневой зоне). Это значит, что Ваша ракета падает! По завершении наклона альтиметр должен показывать примерно 50 — 60 км. В это время удобным будет вызвать карту нажатием «m». Как только точка, обозначенная флажком Ap (апоцентр) будет выше 75 км, выключите двигатели нажатием «х».
Дальнейший вывод можно разделить на два способа:
Способ 1 (более сложный и интересный)
Разверните ракету так, чтобы она была расположена в направлении полета (зеленый кружок), затем ускорьте время так, чтобы оказаться недалеко от флажка апоцентра. Затем включите двигатели на полную мощность. На карте станет заметно, что орбита расширяется. В какой-то момент она «обхватит» планету, и появится резко поднимающийся флажок Pe (перицентр).Подождите, пока перицентр не поднимется выше 70 км и выключите двигатели.
Способ 2 (более легкий)
Воспользуйтесь маневрами, установите манёвр на круговую орбиту в апоцентре. Пользуясь инструкцией, осуществите манёвр.
Поздравляем, Ваша ракета находится на круговой орбите!
Сход с орбиты
Чтобы сойти с орбиты, нужно всего лишь развернуть корабль против хода движения (зелёный кружок с крестиком) и включить двигатели. На карте будет заметно, что перицентр снизится и в конце концов исчезнет. В это время Вы можете выключить двигатели и отсоединить все лишние ступени. Также полезно будет выпустить парашют(ы). Теперь откиньтесь на спинку кресла и смотрите, как капсула с экипажем медленно (или не очень) спускается на землю.
В случае удачного приземления Вы можете похлопать себе в ладоши, ведь Вы только что совершили полёт в космос!
Это — краткая «шпаргалка» по орбитальным маневрам, содержащая немного информации по особенностям, математике, вводной информации или видео-контенту (все это гораздо понятней представлено на других страницах и статьях). Эта статья, напротив, предназначена в качестве справочника, используемого в процессе игры.
Contents
Вывод на орбиту
Вы можете сохранить топливо при движении близко к своей предельной скорости падения во время подъема. Меньшая скорость расходует дельта-V на гравитационные потери, большая — расходует на противодействие воздушному сопротивлению:
| Высота (англ. «Altitude») (м.) | Примерная предельная скорость падения (м./с.) |
|---|---|
| 500 | 105 |
| 1,000 | 110 |
| 2,000 | 120 |
| 3,000 | 130 |
| 5,000 | 160 |
| 6,000 | 180 |
| 7,000 | 200 |
| 8,000 | 220 |
| 10,000 | 260 (Не забудьте начать гравитационный маневр!) |
| 13,000 | 350 |
| 15,000 | 425 |
| 16,000 | 470 |
| 32,000 | 2250 |
Изменение формы орбиты
В целом, включение тяги по направлению движения, сделает Вашу орбиту «больше», а включение против направления движения — «меньше».
Понижение Вашего апоцентра производится включением двигателя против направления движения (смотрите на НавБолл) в Вашем перицентре. В отличии от этого, подъем Вашего апоцентра производится включением двигателя по направлению движения в Вашем перицентре.
Понижение Вашего перицентра производится включением двигателя против направления движения в Вашем апоцентре. Подъем Вашего перицентра производится включением двигателя по направлению движения в Вашем апоцентре.
Совмещение наклонений орбит
Если Вам необходимо вывести космический аппарат на такую же самую орбиту, как и у другого объекта (планета, космический корабль, и т.д.), установите его в качестве своей цели в Общем обзоре карты. Вы должны увидеть две зеленых стрелки, промаркированные как «Восходящий узел» (англ. «ascending node») и «Нисходящий узел» (англ. «descending node»), где пересекаются траектории движения обеих объектов.
Направление, в котором космический аппарат должен включить двигатели, зависит от направления движения на текущей орбите по отношению к целевому наклонению орбиты. Если задержать курсор мыши над маркерами восходящего или нисходящего узлов, то увидите различие между ними в градусах. Оба значения показывают одинаковое отличие, но нисходящий узел показывает значение как отрицательное число, в то время как восходящий узел показывает значение как положительное. Если космический аппарат движется через восходящий узел, то угол должен быть положительным, то необходимо включить двигатель в направлении «антинормали»a (Юг для экваториальной орбиты). Если космический аппарат движется через нисходящий узел, и угол — отрицательный, то необходимо включить двигатель в направлении «нормали» (Север для экваториальной орбиты).
Если Вам необходимо сделать несколько включений двигателя, чтобы достичь желаемого Вами наклонения, помните, что, если Вы включаете двигатель в направлении «нормально» по отношению к орбите на одном узле, то Вы должны включить двигатель «антинормально» на другом для продолжения движения в том же направлении.
Это должно также помочь при планировании включения Ваших двигателей, с использованием системы планирования орбитальных маневров в Общем обзоре карты, где «нормальное» и «антинормальное» направления указаны фиолетовыми значками. Совмещение наклонения орбит является крайне важным первым шагом при сближении или стыковке.
Стыковка/Сближение
Орбитальное сближение — один из самых сложных маневров, требующий идеального совпадения по орбитам и положению. Выполните шаги, указанные ниже для того, чтобы разобраться в этом на своей первой попытке и почувствовать себя настоящим космическим волком. Эти шаги также подходят для выхода на орбиту вокруг планет и лун.

Орбита это эллиптический путь вокруг небесного тела. Точка орбиты, ближайшая к небесному телу, называется перицентр, наиболее удаленная — апоцентр. На карте эти точки обозначены как «Pe» и «Ap», соответственно.
Орбита называется “стабильной,” если все точки орбиты находятся над поверхностью и атмосферой, что эквивалентно тому,что перицентр над поверхностью и атмосферой, так как это самая низкая точка орбиты. Космический аппарат на такой орбите не будет терять скорость из-за сопротивления атмосферы и не врежется в землю.
Чтобы достичь орбиты, аппарат должен набрать достаточную высоту и орбитальную скорость. Во время подъема гравитационный манёвр помогает достичь обе цели эффективным в смысле экономии топлива способом.
Contents
Используемая терминология
Свойства
Каждая орбита имеет некоторые базовые свойства, характеризующие её. Этот список содержит множество величин, которые могут быть вычислены при помощи других из списка.
Апоцентр и перицентр
Апоцентр и перицентр (апсиды) определяют ближайшую и наиболее удаленную точки орбиты. Перицентр (ближайшая точка) помогает определить, достаточно ли высоко лежит орбита, чтобы избежать столкновения с поверхностью или взаимодействия с атмосферой. Апоцентр находится на другом краю орбиты и это наиболее удаленная точка от тела, вокруг которого вращается аппарат. Перицентр не указывается, если он лежит под поверхностью. Здесь возникает путаница от какого уровня измеряется высота точек. В игре высота отсчитывается от поверхности, в то время как в орбитальной механике обычно рассматривается расстояние от центра тела. При движении от апоцентра к перицентру аппарат приближается к поверхности, а от перицентра к апоцентру — удаляется.
Для параболических и гиперболических траекторий апоцентр никогда не указывается, так как лежит за пределами сферы влияния. Перицентр текущей траектории показывается только если аппарат ещё не прошёл его. Как только корабль проходит наинизшую точку перицентр пропадает.
Иногда для различных тел используются специальные слова. Апокей (англ. «apokee») или апокерб (англ. «apokerb») для апоцентра и перикей (англ. «perikee») или перикерб (англ. «perikerb») для перицентра орбиты вокруг Кербина.
В Kerbal Space Program апсиды обычно обозначаются маркерами “Ap” и “Pe”. В реальном мире используют прописную Q для апоцентра и строчную qдля перицентра, так как переменные обычно обозначаются одной буквой. Использование a для апоцентра не рекомендуется, это может вызвать путаницу, так как такое имя обычно используют для большой полуоси.
Эксцентриситет
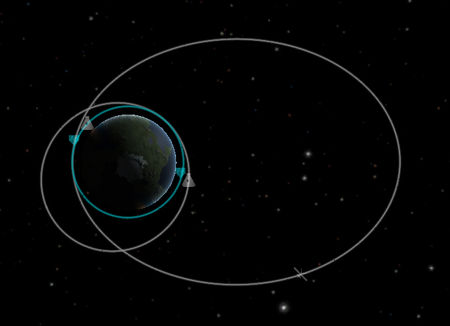
Эллиптическая орбита — 0<e<1 (белая) и круговая орбита — e=0 (синяя)
Эксцентриситет показывает «сжатость» орбиты. Связь эксцентриситета и формы орбиты:
- Для круговой орбиты эксцентриситет равен 0
- Для эллиптической орбиты эксцентриситет между 0 и 1
- Для параболической орбиты эксцентриситет ровно 1
- Для гиперболической орбиты эксцентриситет больше 1
Если эксцентриситет больше или равен 1, то космический корабль покидает тело. Круговые или параболические орбиты не распространены или даже практически трудновыполнимы, так как в этом случае маневрирование должно быть невероятно точным. Но существует возможность получения эксцентриситета очень близкого к этим величинам, и рассматривать орбиту как круговую или параболическую. Некоторые планеты и луны в Kerbal Space Program имеют идеальную круговую орбиту. Это возможно, так как они движутся «по направляющим», и физические взаимодействия не могут изменить параметры орбиты.
Эксцентриситет обычно обозначается строчной e.
Наклонение

Наклон орбиты определяется наклонением. Обычно эта величина измеряется в градусах и принимает значения от –90° до 270°. Наклонение в 0° или 180° характеризует экваториальную орбиту, то есть аппарат всегда находится над экватором. Наклонение в 90° характеризует полярную орбиту. Если наклонение меньше 90° орбита прямая, то есть вращение вокруг тела сонаправлено с обращением тела вокруг своей оси. Наклонение между 90° и 270° определяет обратную орбиту, то есть вращения тела и аппарата противонаправлены. Так как все тела в Системе Кербола обращаются против часовой стрелки, если смотреть с северного полюса, то прямая орбита — против часовой стрелки, обратная — по часовой.
При взлёте с поверхности тела наименьшее доступное наклонение будущей орбиты ограничено широтой стартовой точки. Полярная орбита всегда возможна, а для получения экваториальной орбиты необходимо стартовать с экватора.Так как Космический Центр Кербала почти на экваторе, возможно получение почти любых наклонений без дополнительных орбитальных манёвров.
На данный момент нет прямого способа определить наклонение без использования модов. Для некоторых планет возможно определить наклонение по луне с нулевым наклонением. В этом случае необходимо пометить луну как цель, тогда «восходящий узел» (англ. «ascending node») и «нисходящий узел» (англ. «descending node») дают углы наклонения. Это также возможно для орбиты вокруг Кербола. «Луной» в данной случае будет Кербин.
В большинстве случаев наклонение определяется относительно экватора, но также может быть определено по отношению к эклиптике. Для Кербина плоскость вращения вокруг Кербола и плоскость экватора совпадают, поэтому нет разницы в определении относительно экватора и относительно эклиптики.
Большая полуось
Если апсиды даны относительно поверхности тела, то формула всё равно применима, но к результату необходимо добавить радиус тела. Большую полуось можно определить как среднее расстояние, но это зависит от того, какое определение среднего расстояния мы применяем. В формулах большую полуось обычно обозначают строчной a, не следует путать её с апоцентром.
Типы орбит
Низкая опорная орбита (НОО)
В английском: «Low Kerbin orbit» (LKO) по аналогии с термином «low Earth orbit» (LEO) – описывает стабильную низкую орбиту вокруг Кербина, которая может быть достигнута с относительно малыми затратами дельта-v. Наинизшая точка должна быть не ниже 70 км, чтобы избежать торможения об атмосферу. Высота обычно не превышает 200 км.
Тонны груза отправляются на низкую орбиту для сравнения эффективности и размеров ракет.
При оптимальных условиях низкая орбита может быть достигнута с 4450-4700 м/с дельта-v. [1]
Благодаря эффекту Оберта низкая орбита является подходящей начальной точкой для путешествий к другим небесным телам.
Стационарная орбита и синхронная орбита
Орбита, у которой орбитальный период равен периоду обращения объекта, на этой орбите, называется синхронной орбитой для этого объекта. Если кроме этого наклонение равно 0° и эксцентриситет равен 0, то орбита называется стационарной. Спутник на такой орбите кажется неподвижным с поверхности тела.
Другие
Можно определить множество других орбит. Список орбит на Википедии содержит наиболее распространённые из них. Они могут быть воссозданы изменением характеристик орбит для меньшей вселенной. Некоторые виды орбит невозможно воссоздать. Например, поскольку в игре не существует точек Лагранжа, то орбит вокруг них невозможно достичь.
Суборбита
Орбита называется суборбитальной, если перицентр орбиты расположен ниже уровня поверхности, так что аппарат ударится о поверхность (или приземлится).
Орбиты в файлах сохранений
Файлы сохранений (и сценарии) в Kerbal Space Program — это просто текст и пригоден для чтения информации об орбите каждого аппарата, созданного на данный момент в игре. Большинство текстовых редакторов позволяют искать name = [Name of craft] с помощью ^ Ctrl + F ( ⌘Cmnd + F для «Mac»). Это помогает быстро найти в файле данные по аппарату. Секция описания орбиты в файле «persistent.sfs» должна выглядеть примерно так:
Каждая из этих строчек имеет значение и, изменив их (а потом перезагрузив сохранение), вы измените орбиту космического корабля.
Для отделения дробной части от целой используется «.» (точка), ноль обозначается как «0», а не «0.0» (например, SMA = 0).
Изменяя эти величины в файле сохранения, можно переместить корабль на любую позицию. Очень полезно для сценариев.
Обучающее видео (на английском языке) по изменению орбиты космического аппарата: Savefile Editing & Orbital Parameters Tutorial by Scott Manley
Идентификаторы (ID) небесных тел
Таблица содержит Идентификаторы (ID) всех небесных тел в Кербольской системе:

В игре Kerbal Space Program изучение того, как попасть на устойчивую орбиту. Является одной из самых важных вещей, которую нужно знать. Без космической ракеты вы не сможете маневрировать и исследовать, фактически застряв на одном месте.
Построение ракеты для устойчивой орбиты
Чтобы попасть на устойчивую орбиту, ваша ракета должна быть построена в два этапа. Эти этапы включают верхнюю и стартовую ступень. Для новичков настоятельно рекомендуется использовать части 1,25 м.

Теперь вам нужно предварительно подготовить ракету, чтобы угловая привязка была установлена в положение «включено». Для этого найдите значок симметрии в левом нижнем углу экрана. Там вы увидите либо шестиугольник, либо круг. Если вы видите круг, вам нужно нажать «С», чтобы включить угловую привязку.
После этого перейдите на вкладку «Блоки двигателя» и выберите «Командирский блок двигателя Mk1». Затем нажмите вкладку «Тепловой режим» и выберите «Тепловой щит1.25м».
Обратите внимание: здесь вам не нужен весь аблятор. Если вы щелкнете правой кнопкой мыши по «1.25м Тепловому щиту» после размещения. Вы можете перетащить ползунок аблятора вниз примерно до 60, чтобы сохранить массу.
Убрав аблятор, перейдите на вкладку «Соединение» и поместите «Связывающий блок TR-18A» ниже «Теплового щита 1.25м». После этого перейдите на вкладку «Утилиты» и выберите «Парашют Mk16». Убедитесь, что вы поместили его сверху «Командирского блока двигателя Mk1».

Затем перейдите на вкладку «Топливные баки» и выберите «Топливный бак FL-T400». После этого поместите его ниже «Связывающего блока TR-18A».
Затем перейдите на вкладку «Двигатели» и выберите «Реактивный жидкотопливный двигатель LV-909». И поместите его под бак. Как только это будет и сделано, вернитесь на вкладку «Соединение» и получите еще один связывающий блок. Поместите его ниже «двигателя, а под него поместите еще один топливный бак. Под два бака поместите «Шарнирный жидкотопливный двигатель LV-T45».
Наконец, перейдите на вкладку «Аэродинамика» и выберите «Basic Fin(Крылья)». Обязательно включите четырехстороннюю симметрию, нажав «X» три раза. После этого поместите «Basic Fin» на самую верхушку вашей ракеты. Обратите внимание, что вы можете нажать «R». Чтобы вернуться к уровню симметрии, если это необходимо. Теперь вы можете назвать свою новую ракету, прежде чем выбрать кнопку сохранения.

Кнопка сохранения представляет собой значок, который выглядит как дискета. Теперь выберите зеленую кнопку запуска в верхнем правом углу, прежде чем двигаться вперед. Чтобы проверить свою ракету и убедиться, что вы можете попасть на устойчивую орбиту.
Запуск ракеты на устойчивую орбиту в Kerbal Space Program

- Сначала нажмите «Z», чтобы получить полный газ, затем нажмите «T», чтобы активировать SAS. Затем нажмите пробел, чтобы активировать первую стадию. После этого вы должны увидеть запуск ракеты.
- Нажмите клавишу «D» во время наблюдения за высотомером и навигационной панелью. Когда вы достигаете 10000 м, ваша ракета должна быть под углом 45 градусов. Продолжайте качать постепенно.
- Нажмите «M», а затем наведите указатель мыши на значок «Ap». Если он превышает 70 000 м, отключите двигатель. В идеале, самая высокая точка на вашей устойчивой орбите должна быть 80 000 м.
- Удостоверьтесь, что, когда при запуске ракеты, Вы избегаете оранжевой секции navball.
- Нажмите «M» еще раз, а затем нажмите клавишу пробела, чтобы отделить ракету от начальной стадии запуска. Теперь перейдите на карту и выберите наиболее отдаленную точку орбиты.
- Нажмите «Add Maneuver Node». Перетащите зеленый значок вправо, пока не увидите значок «Pe» на другой стороне Kerbin. Также убедитесь, что высота переапсида превышает 70 000 метров.
- Посмотрите налево от своего навигатора. Там вы увидите набор значков. Нажмите на значок в правом верхнем углу «Maneuver».
- Вы увидите время для пересечения точки орбиты и время горения справа от вашего навигатора. Теперь сделайте разрыв во времени, нажимая клавишу «.», пока время до узла не станет ровно вдвое меньше вашего времени горения.
- После этого уменьшите время ускорения, нажимая «,» несколько раз. Затем нажмите «Z» и горите (не забудьте прекратить гореть, когда переапсида будет находится выше 70 000 м).
Читайте также:
- Sea of thieves когда вышла в стиме
- Deer isle dayz обзор
- Super flower leadex silver 750w обзор
- Кольт экспресс настольная игра обзор
- Peavey rage 258 обзор