Страница 1 из 11
-

5yoda5
Master
Команда форума- Регистрация:
- 29 янв 2015
- Сообщения:
- 7.137
- Город:
- Реж
- Имя:
- Тимур
Что такое унитазинг.
Почему бывает унитазинг. Механизм возникновения.
Общие рекомендации по решению проблемы. (написать)
Некоторые теоретические рассуждения по проблеме унитазинга.
Один из методов решения проблемы (подбор магнитуды).
Поиск и решение проблем Алексеем из Иваново.Последнее редактирование: 14 июн 2018
-
5yoda5
Master
Команда форума- Регистрация:
- 29 янв 2015
- Сообщения:
- 7.137
- Город:
- Реж
- Имя:
- Тимур
Никак не могу добиться от коптера правильного поведения в авторежимах.
«Стоячий» Loiter — недостижимая мечта. Даже Simple бывает врёт.
Что делал:
1. Поставил внешний компас, проводок к нему завил косичкой.
2. Естественно — калибровка компаса через танец с коптером, на экране шесть кругов (не точек).
3. Компассмот в данный момент — 29% (высоковат, переложил провода, заплел их между собой поменял видеолинк — сегодня перемеряю). Персональный рекорд — 9% при компассмоте, но это не решило проблемы.как выражаются проблемы:
1. Если смотреть на компас в первой вкладке МП, то при наборе максимальных оборотов стороны света уплывают до 10 градусов (это было на встроенном компасе, возможно теперь этого нет или наоборот сильнее)
2. При активизации режима стабилизе с опцией симпл — симпл работает правильно только первое время. Стоит немного полетать (особенно если были крутки то yaw) — то начинает врать стороны.
3. При активизации Loiter начинает унитазить с расходящимся радиусом кругов, набирая горизонтальную скорость. Если не остановить безобразие — кончится крашем, причем движки будут копать землю до последнего (и конечно сгорят, если не переключиться в другой режим и не задизармить)Что крутить? Видел, у людей лоитер работает нормально с значением компассмота более 70%…. И навигация у меня теперь стоит GPS/Glonass — в полете ловит до 22 спутников, hdop до 0,5…
Может какой-нибудь волшебный параметр в МП, типа compass_learn активировать/задизаблить? Или какой-нибудь Loiter ПИД покрутить?
-
raefa
Главнокомандующий
Команда форумаТимур, помнится, ты говорил, что у тебя похоже аномальная зона (шутка или не шутка
") ). За это время никак не удалось побороть проблему унитаза?!
). За это время никак не удалось побороть проблему унитаза?!
Начнем сначала. Т.е. без разницы встроенный или внешний используется компас? А если внутренний, то была ли попытка поменять? Может так везет, что брак попадается все…
Ну а на голой плате без подключенных всех компонентов совпадает направление по походному компасу и по сторонам, если, например линейку положить на север? -
5yoda5
Master
Команда форума- Регистрация:
- 29 янв 2015
- Сообщения:
- 7.137
- Город:
- Реж
- Имя:
- Тимур
Да, начнем сначала. У меня в лапах было три типа контроллеров, два типа с мегапиратом, и два экземпляра АРМ. Ни на одном контроллере (четыре единицы) нормально компас у меня не работал. Значит — я что-то делаю не так (на технику и китайцев грешить самое простое, но я думаю, что тут «дело вовсе не в бобине, а м**ак сидит в кабине»).
Сразу на все вопросы не отвечу, но сделаю это постепенно.
«Аномальная зона» — больше там не летаю. Там река делает много петель — загибов (неспроста как мне кажется). Я в том месте шел по прямой, у меня туристический компас несколько раз менял свои показания (какой фиговый свидетель блин). Общий разброс был в районе 45 градусов. Поэтому пока в то место не суюсь (так сказать до выяснения). Одно время летал в другом месте — там магнитных аномалий не обнаружено, калибровался в том же месте, симпл так же врал, поэтому плюнул. НО это всё было на встроенном компасе.
Когда случился последний улёт — принял волевое решение — меняю компас на внешний (возможно в том улёте автовозврат бы спас падавана). Компас поставил, постарался выдержать такое же положение, как должно быть на контроллере. Закрепил его сантиметров на 15 выше контроллера, на мой большущий GPS/Glonass. После восстановления коптера был один тест, но слегка неудачный (неделю назад). В новом месте, третьем по счету (на старое проехать не мог) откалибровал компас, проверил наводки (компассмот показал 29%) — вылетел протестировать. Перещёлкнул на симпл, покрутился немного, полетал чутьчуть, деже ещё не понял врёт ли симпл — коптер от меня втопил в сторону, воткнулся двумя лучами в снег, и крутил моторами до их обугливания (пока добрался физически до коптера по полю/по снегу, да ещё блин не увидел издали что он задурковал). Причина — конфликт с видеоТХ на коптере. Я совсем забыл (спешка, мать её) — что последние полеты тестировал этот видеолинк (0,9 ГГц, 0,8 Вт), и летал всё это время с бустером. Раньше при установке этого линка на коптер у меня случился улёт (тогда бустера ещё не было). Гарантированная пропажа РУ на 100-200 метрах. Что и случилось в этот раз. Естественно, коптеру было пофигу на мои команды, так как приемник оглох от видеопередатчика. А пульт я что-то не успел выключить, хотя это возможно и не помогло бы. Место номер три я на магнитные аномалии не проверял, так как во время поисков в лесу потерял компас.Ну ладно — это лирика, к делу. Коптер я починил, видеолинк заменил на 5.8, сегодня поеду тестировать. Попробую проехать на «безглючное» проверенное поле (на пузотёрке туда не всегда можно пробраться). На месте откалибруюсь, замеряю компассмот, проверю хотя-бы симпл. Если по пути смогу купить компас, то проведу тесты на уплывание компаса в МП.
Один общий штришок (потенциальное нарушение процедуры) — подключение у меня происходит по кабелю к нетбуку. Не знаю, есть ли при этом наводки на компас. То есть и калибруюсь с кабелем и компассмот делаю с кабелем.
-
raefa
Главнокомандующий
Команда форумаПрисоединюсь к мнению. Надо разносить по разным углам и желательно вне колпака. Да и с поляризацией антенны поиграться, но это отдельная тема. В теории надо конструкцию/расположение антенны делать так, чтобы КСВ был минимальным, а не как захочется антенну поставить. Но на таких частотах без дорогого оборудования мы ничего не сделаем.
А вроде же сделали краш детектор?! Прошивка старая?
Именно.
По влиянию не подскажу, но уже наверно надо считать наличие телеметрии хорошим тоном. Или телеметрия есть, но с ней все сложнее и не удается делать по ней связь к ноуту?
-
5yoda5
Master
Команда форума- Регистрация:
- 29 янв 2015
- Сообщения:
- 7.137
- Город:
- Реж
- Имя:
- Тимур
Прошивка 3.1.5. На 3.2 что-то пока не перешел, наверное надо. Подожду ещё несколько допиливаний после релиза. Хотя вроде народ уже нормально летает на 3.2…
Телеметрия есть, работала, но я её снял. Имея непонятки с наводками упрощаю конструкцию. Было ещё ошибочное мнение, что я не могу компассмот сделать при подключении через модемы (дело было совершенно в другом — то ли ФС по батарее, то ли тип датчика тока/напряжения). Так или иначе, телеметрия лежит в коробочке. Верну ли я её назад на коптер — пока не знаю. Ноут на полеты брать вроде как не люблю, беру с собой только на всякие настройки.
-
5yoda5
Master
Команда форума- Регистрация:
- 29 янв 2015
- Сообщения:
- 7.137
- Город:
- Реж
- Имя:
- Тимур
Отписываюсь. Унитазинга более нету. Наверное более точный модуль, работающий без ошибок — сделал своё дело.
Плюсы —
1. Loiter -работает нормально. Был ветер 2-3 м/с, коптер бултыхался в сфере где-то от метра до трёх.
2. Альтхолд работает нормально.
3. RTH вроде тоже работает. До посадки дело не доводил. Просто угнал коптер подальше, щёлкнул тумблером, убедился что он подлетел ко мне без каких-либо эксцессов, выключил режим.
Автопосадку не пробовал — но у меня по ней вопросов не было.А теперь — минус.
Компас похоже всё-таки не работает. Следствие — когда перещёлкнул в режим стаб с опцией симпл — коптер путал стороны. На экране МП надпись бэд компасс хелтч. И стороны света показывает с ошибкой близкой к 90 градусов — чуть меньше (я-таки купил компас, правда какой-то диковатый). И это без запуска движков. С запущенными движками даже тестировать не стал.
Но вот что непонятно. Почему тогда калибровка выполняется? Неужели за счет акселя? При калибровке снялось порядка 1700 отсчетов, круги на экране нарисовало, даже офсеты вычислило (но что-то большие -30, -40 — не помню точные значения, но порядок похожий на всех трех осях).Я конечно перепроверю подключение. В статусе (mx, my, mz) я увижу сырые данные только компаса? Как можно точно проверить компас?
Возможно, я его перегрел при пайке…. -
raefa
Главнокомандующий
Команда форумаПро какой модуль речь? Видео передатчик же хотел поменять.
Обычно при проблемах надпись появляется или при коннекте или при арминге. А с внешним как? Аксель тоже показывает изменение направлений при отсутствующем компасе. Но при этом, если не запамятовал, не важно, как стоит коптер, но инзачально будет показывать одно направление, вроде бы север. mx,… меняться при этом не будут, при компасе будут. Офсеты и такие нормально, и по 100 нормально. Идеал конечно в районе нуля. Да, в mx,… это именно сырые данные компаса.
Тимур, расскажиё, что вообще делал с компасами в разных конфигурациях?
-
5yoda5
Master
Команда форума- Регистрация:
- 29 янв 2015
- Сообщения:
- 7.137
- Город:
- Реж
- Имя:
- Тимур
ФСЁ, разобралсО!!! Слава богу, а то я уже в чудеса начал верить…
Глюк номер один:
когда МП обновляешься на последнюю версию — не получается загрузить прошивку из инета. Если точно — я ему тык «Pick previous firmware», а он мне фигвам — окошко Error с надписью «There was an unexpected error». Загрузить предыдущую прошивку можно только вручную вот отсюда http://firmware.diydrones.com/. Но надо знать дату, когда вышел интересующий нас релиз. Чтобы не искали — 27 мая 2014 года вышел релиз 3.1.5
Далее, глюк номер два:
Сразу после прошивки 3.2 нам программа вещает типа «если вы впервые поставили прошивку 3.2, то откалибруйте компас» — что должно было меня насторожить.
Короче — я наступил на древнее сельскохозяйственное орудие (которое бьет по лбу) — после прошивки на версию 3.1.5 нужно не только чистить еепром, но и делать заводские настройки (setup > erase) — ну Семён Семёныч!!!!!
ФОТ и ФСЁ…
Короче, сейчас все то же самое проделаю на коптере (тренировался на столе на контроллере), завтра в поле откалибруюсь (хобби у меня такое — в поле постоянно калиброваться))) , о результатах сюда отпишусь.Пожелайте мне удачи — завтра будет боевой вылет
-
raefa
Главнокомандующий
Команда форумаТак с чем ты там все разбирался? Проблема с компасом, менял видеолинк, а пришлось бороться с MP для смены прошивки? Вот как! Все в кучу собрал. Теперь попробуй сам разобраться, что же у тебя там унитазит.
Удачи с калибровкой в поле и в полете!
-
5yoda5
Master
Команда форума- Регистрация:
- 29 янв 2015
- Сообщения:
- 7.137
- Город:
- Реж
- Имя:
- Тимур
Отлетался сегодня успешно. Ничего не унитазит, коптер послушный аки котенок.
Так, всё объясняю по-порядку.
Постоянно имел проблемы с компасом. Все контроллеры, которые использовал были с встроенным компасом. Даже если сначала, при активации Simple коптер летал правильно, то потом начинал врать стороны. Из-за этого было пару улетов. Эти проблемы преследовали меня и с первым коптером и со вторым. При переключении в Loiter наблюдал классический унитаз. На первом коптере даже крешанулся из-за этого.
Хорошо, я думаю — у меня фиговый модуль GPS. Я их перепробовал три штуки — все обладали теми или иными глюками. Возможно другому автопилоту было бы пофигу, но у АРМ сносило крышу. В конце концов — разжился нормальным GPS/Glonass модулем (знакомый вызвался спаять, вышло неплохо — до 24 спутников в полете и 0,5 hdop). Поставил, но при тестировании очередь до Loiter не доходила (на аппе раньше стоит режим Simple). А ещё учесть, что раньше у меня была настройка Loiter С опцией Simple — то мои проблемы понятны — компас. (теперь понятны). Вчера я тестировал Loiter без опции Simple — всё летало нормально.
Но я забежал вперед. Две недели назад я принял решение поставить-таки внешний компас. Благо две платки с ебея давно заказаны были. Контроллер у меня на тот момент стоял АРМ с компасом (HKPilot 2.5). Значит я перерезал перемычку, подключил контроллер к МП — убедился, что компаса больше контроллер не видит.
Потом подключил внешний компас к АРМ — И ПОНЕСЛАСЬ….. На экране «бэд компасс хелт». Надо было сделать в терминале setup > erase, и setup > reset, а потом откалибровать компас. Но это я СЕЙЧАС знаю. А тогда…. ))))
Увидев надпись про плохое здоровье компаса — я сразу подумал на аппаратную часть. Так как этот контроллер уже учавствовал в нескольких ЖЕСТОКИХ крашах (один краш был со всей скорости башкой вниз — ох и звук был!), на нем уже был перепаян стаб на 3,3 вольта, ему выдрало (а потом я аккуратно выпаял остатки) СОМ порт для телеметрии, были раскрошены пара резисторов на этом порту (последствия краша)…. Короче, думаю I2C шина не работает, надо брать другой контроллер (ага, а если I2C не работает, как встроенный раньше работал? — хех )
Но дело было ночью. А приближались потенциально полетные дни с хорошей погодой. Ладно — фига ли мне — давай на коптер ставить другой контроллер APM 2.6. У него встроенного компаса нет. Но после установки на коптер выяснилось — что этот гребанный МП не хочет прошивать прошивки ниже 3.2 (если обновлен на текущую версию). Отступать некуда, скачал вручную прошивку из инета.
Тут ещё на одни грабли наступил (с этим разобрался уже сегодня). Перед установкой сохранил настройки контроллера в файл, чтобы потом все вручную не настраивать. А после установки нового контроллера залил туда настройки из файла. Так вот — они тоже давали бэд компасс хелт.
Знатный вышел марафон по граблям.В общем, всем читающим — наказы:
1. аккуратнее с загрузкой файла с настройками.
2. не забываем сбрасывать память от огрызков прошлых прошивок (в терминале setup > erase, и setup > reset)
3. ну и естественно, калибровка и компассмот.
4. внешний компас — реально помогает (мой нынешний компассмот — 9%, я вернулся на свой личный рекорд)Параллельно ещё была замена видеолинка с 5,8 на 0,9, а потом назад на 5,8 — но это к проблеме унитаза не относится.
Короче — я победил все глюки, всё летает как надо!
Сегодня полетал душевно. После победы над глюками слетал в высоту. Дополз где-то до 1,5 километров (точно ещё не знаю, наземное видео не пересматривал) на акке 4S 5А, при посадке до базы не дотянул 300 метров, сел в снег на поле. Благодаря Пеленгу — нашел быстро. Видосик с наземки выложу сюда чуть позже.Всем спасибо (Александру за помощь — персональное спасибо), если будут вопросы — отвечу.
-
raefa
Главнокомандующий
Команда форумаСобственно в чем косяк то был я так и не понял. Много написано, а четко причины проблемы — НЕТ!
Жду еще одну версию.
Догадка №1 — еепром?Всегда был такого мнения и никогда не пользовался этой фишкой.Да, после каждой прошивки новых/старых версий.
Еще бы я заметил, что планер лучше использовать близкий по дате выхода прошивки, чтобы новых косяков из-за апгрейдов не всплывало.
-
5yoda5
Master
Команда форума- Регистрация:
- 29 янв 2015
- Сообщения:
- 7.137
- Город:
- Реж
- Имя:
- Тимур
Потому так много и написано — что целый букет проблем. Тут и непрочищенный вовремя еепром и загруженный файл (да ещё от другого контроллера) и непонятки с МП (не грузилась нужная мне версия прошивки, и установленная опция Симпл в Лоитере (при глючащем компасе).
Но написано и главное — у меня всё устаканилосьВидео грузится… Взятая высота — 1660 метров. Но до финиша не дотянул 300 метров — топливо кончилось ))))
-
raefa
Главнокомандующий
Команда форума -
5yoda5
Master
Команда форума- Регистрация:
- 29 янв 2015
- Сообщения:
- 7.137
- Город:
- Реж
- Имя:
- Тимур
Хорошо, когда зальется и обработается, сделаю пост туда. Ну и напишу чего-нибудь.
-
Вадимм
Научный сотрудник- Регистрация:
- 25 июн 2015
- Сообщения:
- 325
- Город:
- Ярославль
- Имя:
- Вадим
Я как то включал свой коптер (АРМ от Валкеры) без модуля GPS компас, контролер брал значение «север» куда смотрит нос коптера при включение, поворачиваешь коптер и компас крутится.
Как понимаю аксель работает за компас.
Вот интересно, контролер сверяет показания компаса и акселя? Или при наличии компаса аксель отсекается? (для ориентации где север) -
raefa
Главнокомандующий
Команда форумаВсе считается совместно, если компас включен. Так сложно работает система AHRS.
Последнее редактирование: 7 июл 2015
-
5yoda5
Master
Команда форума- Регистрация:
- 29 янв 2015
- Сообщения:
- 7.137
- Город:
- Реж
- Имя:
- Тимур
Вчера обратил внимание, что в зависимости от того, что делал коптер до перехода в лоитер — его то унитазит, то нет. Закономерности не выявил, но есть подозрения, что если перед переходом на лоитер коптер вращался, то в лоитере начинается унитаз. Повторить опыт не удалось — возможно догадка не верная (унитазило один раз, потом никак не мог добиться).
-
raefa
Главнокомандующий
Команда форумаУ меня уже давно компас не очень откалиброван. На крестотесте есть расхождения. Например Север и Юг показывает с точностью до 2-3°, а Запад и Восток на 5-6. Так вот если стоит к Северу, то унитазинга нет, а если к Востоку, то бывает очень редко. Так же у меня сейчас compassmot в старой калибровке, когда был БК подвес с GoPro, а сейчас снят. Т.е. болтанку чуть наблюдаю, но вообще не напрягает. Еще есть заметка, что например в направлении Север и Юг в лоитере и по миссии летит четко носом вперед, а Запад и Восток с небольшим косяком. Чтобы визуально летел ровно, надо немного подруливать креном/рысканием. Опять же повторюсь — надо мне его перекалибровать, а лень. Больше года такое состояние и не напрягает.
-
5yoda5
Master
Команда форума- Регистрация:
- 29 янв 2015
- Сообщения:
- 7.137
- Город:
- Реж
- Имя:
- Тимур
Было такое до краша. И после краша бы не заморочился, если бы не потребовались полеты в лоитере.
Только интересно (академический интерес) — по какой причине у меня крутило стрелку «домой» при снижении в последней попытке на рекорд (когда крашнулся). Неужели облака так поиздевались надо мной? (надвигался фронт плохой погоды) Я при анализе логов ничего криминального не увидел, только когда падал — несколько раз GPS Glitch. Кстати, надо видео того полета на свой канал выложить.



Страница 1 из 11
Помогите, пожалуйста, понять почему коптер очень сильно унитазит и идёт в разнос при включении RTH или NAVPOSHOLD.
Это мой первый коптер.
состав:
Matek F405-SE
Emax ECO 1700kv
Gemfan Flash 7042
QczekLRS 2.1
сборка 4S1P на коричневых 18650.
radiomaster tx18s
установлен inav 2.6.
но те же проблемы были на inav 2.5.1
сорбираю по видео RCSchoolmodels:
пробелма выглядит так:
армлюсь, включаю удержание по барометру, компасу и GPS.
поднимаюсь на 3-4 метра, отлетаю от себя на допустим 10, вроде не ведёт его. не как вкопанный стоит, но более-менее всё хорошо.
переключаю на RTH, коптер начинает ровно вверх набирать заданные 60 метров.
потом начинает идти к точке посадки и тут его начинает вращать по спирали, увеличивая радиус всё больше и больше.
он опускается, набирая всё больший радиус, мне становится страшно от угла крена и радиуса спирали и я выключаю RTH.
Иногда он замирает в точке, а иногда продолжает спираль, но уменьшая радиус, тогда я выключаю фиксацию по GPS и он перестаёт унитазить.
Дальше его немного сносит ветер и я сажаю его стиками.
Курсовой камеры пока нет, поэтому видео показать не могу. Есть только логи с telemetry viewer и чёрного ящика.
GPS очень китайский NEO-M8N ( www.aliexpress.com/item/32908773973.html ) , совмещён с компасом и закреплён на упаковку от мотора — но видит 16 спутников и HDOP 0.8
Первая попытка включить RTH чуть не увенчалась потерей дрона — он поднялся в городе на 200 с чем то метров и улетел в сторону на 400м, хорошо,
что я сообразил выключить RTH и по приборам кое как вернул его, и повезло, что батарей хватило, а то при наборе высоты ток был 20А и просадка до 8вольт на пак.
Внешний вид и режимы на фото во вложении.
В сообщение не даёт прикрепить большой лог от чёрного ящика, так же изменения из CLI: diff all находятся тут:
…google.com/…/1p8ihWQ4C3KEZaiWWCIbJ09OL-ds8D9H4?us…
Подскажите, пожалуйста, что я сделал абсолютно неправильно, что у него такое поведение?

сам спросил — сам отвечу — кажется проблема в наводке на компас. потому, что на столе пробую даже при 2,5А от провода АКБ наводка идёт. а что говорить при 20А.
кажется проблема в наводке на компас.
Отключите компас в инаве
Мне кажется или есть тема про айнав…
Мне кажется или есть тема про айнав…
Это конфиденциальная информация
Мне кажется или есть тема про айнав…
Про INAV есть, но в ветке самолетов. А там свои нюансы — например, компас в самолетах мало кто использует из за своей специфики
Про INAV есть, но в ветке самолетов.
Как будто мы живем в параллельных вселенных.
Соседняя тема про айнав разве не про коптеры?
Или все также конфиденциальная информация
может и конфиденциальная, дело ведь не в inav, а в недостатке знаний и опыта и поэтому неправильно собранном железе 😃
с другом это выяснили — он держал коптер с пропеллерами, а я добавлял газ с пульта и смотрел на положение коптера в inav configurator.
Вот, у меня 18650 были в 0см от gps+компаса 😉 А Саша все прояснил
Вот, у меня 18650 были в 0см от gps+компаса А Саша все прояснил
На это “дело” влияет множество факторов!От производителя,марки и даже партии батарей! Влияет да же марка полётника! Летал на matek f405-ctr, заменил наF405-SE — одна и та же рама — одно и то же расположение АКБ — одни и те ж АКБ…там на верхней палубе приклеен ГПС — на F405-SE + поставил ножку 10см под ГПС ,а иначе ни как!
Когда вы летаете на своем дроне, мало что может быть страшнее, чем неконтролируемое движение унитаза вашего дрона. Это движение — это когда дрон движется из стороны в сторону по небольшой кривой, при этом, возможно, двигаясь вперед и назад. Несомненно, это невероятно страшно. Амплитуда движения может стать очень большой. Это означает, что любые нависающие ветки или препятствия могут легко войти в контакт с вашим дроном, так как он бесконтрольно колеблется из стороны в сторону. В этой статье мы рассмотрим все причины, почему дроны садятся в унитаз, и что вы можете сделать, чтобы этого никогда не случилось с вами.
Почему мой дрон унитазничает? Дроны садятся в унитаз, когда возникает значительное расхождение между данными компаса и данными GPS или IMU. Когда дрон видит расхождение, он начинает игнорировать данные GPS и может перейти в режим ATTI или начать неконтролируемо колебаться из стороны в сторону.
Иногда дрон «унитазит».
Иногда эффект унитаза вызывается комбинацией проблем, поэтому необходимо откалибровать ряд электронных компонентов дрона, чтобы убедиться, что один из датчиков или их комбинация не посылают противоречивые данные на инерциальный измерительный блок и полетный контроллер.
Что вызывает туалетный боулинг
Туалетный боулинг на дроне вызывается расхождением между датчиком компаса и инерциальным измерительным блоком. Кроме того, данные GPS также могут вызывать расхождение между направлением, которое, по мнению компаса, указывает дрон, и направлением его движения.
Довольно часто дроны DJI переходят в режим ATTI, когда возникают значительные расхождения в данных GPS или если качество или количество спутников значительно снижается.
Обычно есть два номера, которые могут вам помочь:
- gpsHealth — это здоровье сигнала GPS от 0 до 5. Это показатель вертикальной и горизонтальной точности вашего дрона. Он часто коррелирует с количеством спутников, с которых дрон смог получить данные о местоположении.
- numSats — это количество спутников, с которых дрон может получать данные на протяжении всего полета. Как правило, дрон не позволит вам взлететь в режиме GPS, пока не будет подключено более восьми спутников.
Когда количество GPS-здоровья падает ниже 3, дрон отключает модуль определения местоположения GPS и переходит в режим ATTI — более подробно об этом мы поговорим далее в статье, но если вы хотите узнать об этом подробнее, прочитайте мою другую статью — Что такое режим ATTI дрона [полное руководство] — нажмите здесь, чтобы перейти к статье.
Здесь представлены некоторые примеры туалетного боулинга с YouTube:
Примеры туалетного боулинга
Возможно, трудно представить, как именно выглядит туалетный боулинг с помощью различных типов дронов. Вот несколько примеров, которые вы можете использовать для сравнения собственного опыта.
Пример 1
Первый пример взят с популярного YouTube-канала TheRcSaylors.
Пример 2
Пример 3
Во всех этих примерах видно, что размер унитаза значительно варьируется. Однако независимо от размера колебаний их всегда очень трудно контролировать.
Есть несколько вещей, которые вы можете сделать перед полетом, чтобы убедиться, что унитаз не упадет, но что вы можете сделать в самый ответственный момент, чтобы остановить падение вашего дрона?
Что делать, если это случилось
Представьте себе ситуацию: вы летаете на своем дроне и прекрасно проводите время, но тут вы начинаете замечать колебания, происходящие во время полета дрона. Неважно, идет ли речь о дешевом, недорогом дроне или о лучшем потребительском дроне от уважаемого производителя, такого как DJI, это может произойти с каждым типом дрона.
Вот простые способы, которые помогут вам решить эту проблему.
<Вот простые действия, которые вы можете предпринять, чтобы остановить падение вашего дрона.
Попробуйте кнопку паузы
Если у вас есть дрон DJI, вы заметите, что на пульте дистанционного управления есть большая красная кнопка паузы на передней панели рядом с левым джойстиком.
Она не только может спасти ваш дрон от сбоев при возвращении домой или других автоматических функций полета, когда вы подлетаете слишком близко к деревьям или другим препятствиям, но и при некоторых обстоятельствах может остановить ваш дрон от боулинга.
Если кнопка паузы вам не подходит, вот еще несколько вариантов.
Попробуйте спортивный режим
Если у вас есть дрон DJI, некоторые люди говорят, что переключение дрона в спортивный режим, а затем обратно может избавить вас от ужасных действий вашего дрона в туалетном боулинге.
Она находится прямо рядом с кнопкой паузы, поэтому вполне логично, что вы сможете быстро осуществить эти два действия одновременно, пока дрон находится в полете.
Ручной полет назад с помощью режима ATTI
Когда дрон чувствует значительное снижение качества данных GPS или количества спутников, он может переключиться в режим ATTI. ATTI означает режим ориентации. В этом режиме датчики GPS отключены, также как и глобальные навигационные спутниковые системы (что означает, что дрон будет дрейфовать по ветру) и датчики избегания объектов. Для поддержания высоты и сохранения горизонтального положения летательный аппарат использует бортовой барометр. Этот режим используется для съемки более плавных кадров, полетов в помещении или предотвращения улетов в случае сбоя сигнала GPS или ошибок компаса.
В этом режиме дрон может быть использован в качестве спутника.
Поэтому рекомендуется приучить себя летать на дроне без данных GPS, чтобы в случае потери связи с GPS можно было безопасно вернуть его на место взлета.
Практикуйтесь летать вручную
Если вы хотите узнать, как практиковаться в управлении дроном, прочитайте мою другую статью — Как практиковаться в управлении дроном [становиться лучше быстрее] — нажмите здесь, чтобы перейти к статье.
У меня также есть еще одна статья, в которой мы рассмотрим все тренировки по управлению дроном, необходимые для того, чтобы чувствовать себя полностью комфортно во время полета, независимо от того, являетесь ли вы полным новичком или профессиональным пилотом дрона — нажмите здесь, чтобы перейти к этой статье.
Это те вещи, которые вы можете сделать немедленно, чтобы остановить ваш дрон от боулинга в туалете, но когда вы благополучно приземлитесь и убедитесь, что это не повторится, вы должны пройти через эти шаги.
Как остановить туалетный боулинг вашего дрона
Вы только что вернулись домой после полета и хотите убедиться, что ваш дрон больше никогда не будет ходить в туалет. Вот все шаги, которые вам необходимо выполнить, чтобы убедиться, что ваш дрон летает безопасно и надежно, без диких колебаний, вызванных «туалетным боулингом».
Проверьте, что компас показывает правильное направление
Первое, что вы должны сделать, это проверить, что ваш компас показывает правильное направление. Это очень простая проверка, и все, что вам нужно сделать, это включить ваш дрон и выйти на улицу. Как только вы убедитесь, что GPS зафиксирован, а компас показывает стрелку на программном обеспечении, вам просто нужно проверить, что дрон направлен в ту сторону, в которую считает программа.
Если дрон направлен в ту сторону, в которую считает программа.
Если стрелка не указывает в ту же сторону, в которую направлен дрон, необходимо откалибровать компас.
Калибровка компаса
Компас на дроне очень важен. Это единственная вещь, которую программное обеспечение дрона просит вас часто калибровать. Это связано с тем, что компас дрона является аварийным средством для возвращения дрона домой, если во время полета что-то пойдет не так. Если компас неправильно откалиброван, ваш дрон может легко улететь в неправильном направлении, и вы можете больше никогда его не увидеть.
В приложении DJI GO4 вы можете увидеть помехи, перейдя в настройки> расширенные>компас и посмотрев на индикатор помех. Вы сможете сделать свой собственный, видя, как индикатор помех увеличивается по мере приближения дрона к магнитно заряженным объектам.
Вы можете быть удивлены тем, как мало он действительно меняется, но есть некоторые вещи, которые заставят его сильно сдвинуться. По моему опыту, самая большая проблема — это железобетон. Мне нравится взлетать на ровных поверхностях, и я часто нахожу ровные бетонные поверхности для взлета, однако железная арматура на внутренней стороне бетона вызывает значительные помехи для компаса.
Как правило, вам следует держаться подальше от:
- автомобилей
- линий электропередач
- огромных залежей металла, таких как свалки
- любых больших металлических конструкций, таких как сараи
- любых больших динамиков — они имеют магниты внутри
Владелец Mavic пытался создать помехи компасу, поднося пряжку ремня, ключи и другие личные вещи близко к дрону. Только когда телефон с динамиком находился сверху дрона, возникали значительные помехи. Они отмечают, что единственным последовательным способом создания помех было размещение перочинного ножа поверх батарейного отсека. Поэтому не стоит слишком беспокоиться о наличии металлических предметов в кармане или рядом с дроном во время взлета.
Для проверки правильности калибровки достаточно взлететь и сделать несколько рысканий на высоте около 10 м. Посмотрите на экран и убедитесь, что движения соответствуют направлению рыскания дрона. Эта простая проверка избавит вас от многих головных болей, если вы беспокоитесь о неправильной калибровке компаса.
Калибровка IMU
Инерциальный измерительный блок — это устройство, которое встроено в ваш дрон и содержит множество различных датчиков, обеспечивающих нормальную работу дрона. В частности, он измеряет силу, высоту и угловую скорость дрона во время полета. Эти показатели измеряются с помощью ряда различных датчиков, которые в совокупности образуют очень мощное устройство.
Какие датчики включает в себя устройство?
Датчики, которые включает в себя устройство, — это акселерометр, гироскоп, барометр и термометр. Гироскоп — это датчик, который определяет движение дрона относительно уровня горизонта и отвечает за поддержание стабильности, чтобы вы могли получить удивительно плавные снимки, которые не будут размытыми. Барометр используется для определения изменений в высоте дрона. И, думаю, все знают, что такое термометр — он измеряет температуру дрона, чтобы убедиться, что батареи не перегреются и не начнут возгораться.
Все, что вам нужно, — это термометр.
Все, что вам нужно, — это ровная площадка, которая будет неподвижна, пока вы калибруете IMU.
<Вот что нужно сделать для дрона производства DJI:
- положите дрон на абсолютно ровную поверхность.
- Дайте дрону остыть, если он недавно летал.
- Используйте аккумулятор, заряженный более чем на 50%.
- Откройте приложение GO4.
- Включите контроллер дрона
- перейдите к расширенным настройкам в приложении GO4 и следуйте инструкциям по калибровке.
Процесс калибровки потребительского дрона среднего диапазона отличается от процесса калибровки мини-дрона. Это связано с тем, что мини-дрон не имеет такого уровня аппаратного обеспечения для поддержания стабильности во время полета. Вместо этого для поддержания стабильности полета он полагается на то, что называется «триммированием».
Калибровка акселерометра
Акселерометры есть в каждом дроне, и они играют очень важную роль в определении стабильности полета дрона.
Каждый дрон калибруется немного по-разному из-за различий в программном обеспечении, а также из-за аппаратного обеспечения, которое есть у каждого дрона, но все они следуют простым основным шагам при калибровке акселерометра.
- Убедитесь, что дрон удерживается в той же ориентации, которую указывает программное обеспечение, используемое для калибровки акселерометра.
- Поместите дрон на ровную и устойчивую поверхность и не двигайте его.
- Запустите процедуру калибровки программного обеспечения для вашего дрона.
- В некоторых случаях требуется выключить и снова включить питание дрона. Следуйте всем инструкциям программного обеспечения.
Здесь приведены некоторые распространенные модели дронов со ссылкой на лучшие методы калибровки, которые я нашел.
Также существует множество научных исследовательских групп, которые стремятся сделать калибровку акселерометра дрона более точной. Одно из таких исследований, опубликованное в 2018 году, показывает, что им удается повысить точность акселерометра, просто пропустив данные калибровки через другую серию математических фильтров.
Обновите прошивку
Следует убедиться, что ваш дрон работает на самой последней версии прошивки, доступной от производителя. Прошивка содержит не только обновления безопасности, исправления ошибок и новые функции — она также содержит исправления распространенных проблем, о которых сообщают покупатели дронов.
Также убедитесь, что пульт дистанционного управления также имеет актуальную прошивку и что приложение DJI Go4 или любое другое приложение, которое вы решили использовать для управления дроном, также является новейшим для вашей модели смартфона.
Никогда не летайте при наличии менее 8 заблокированных спутников GPS
Иногда может возникнуть соблазн быстро взлететь без надлежащей фиксации местоположения спутников GPS. В дронах DJI невозможно включить режим GPS без подключения как минимум восьми спутников. Если вы не хотите, чтобы история с вашим унитазом повторилась, вам следует убедиться, что перед взлетом у вас зафиксировано гораздо больше восьми спутников GPS. Это позволит избежать неожиданного перехода дрона в режим ATTI во время полета.
Используйте внешний GPS
Если вы построили свой собственный дрон, вы можете использовать внешний GPS вместо того, который поставляется в комплекте с некоторыми другими печатными платами. Блок GPS должен быть установлен вдали от любых электронных или магнитных помех. Вы можете установить GPS на подставке, что значительно снизит вероятность возникновения помех от других электронных компонентов.
Скрутите провода заземления
Когда вы собираете дрон, по всей раме и корпусу проходит множество проводов. Вы можете уменьшить количество магнитных помех, создаваемых этими проводами, скрутив их вместе так, чтобы они гасили друг друга.
Скрутите провода вместе, чтобы они гасили друг друга.
Это обычная тактика при создании электронных устройств, чувствительных к магнитным импульсам или сигналам.
Просмотр файлов .DAT может помочь
И наконец, получение файлов данных полета с дрона (вы должны выйти из дрона, а не из контроллера) и анализ этих данных может помочь вам понять, что именно является причиной вашего туалетного боулинга. Иногда вы ничего не можете сделать, кроме как отправить дрон обратно производителю и потребовать замены.
Обзор
Ваш беспилотный унитаз барахлит из-за противоречивой информации от ряда электронных компонентов. Одно из самых простых решений этой проблемы — калибровка компаса, а также обновление любой прошивки вашего дрона.
Учитесь летать вручную — это один из лучших навыков, которые вы можете приобрести, чтобы убедиться, что вам очень комфортно летать на дроне, даже когда он «унитазничает».
Что такое PID
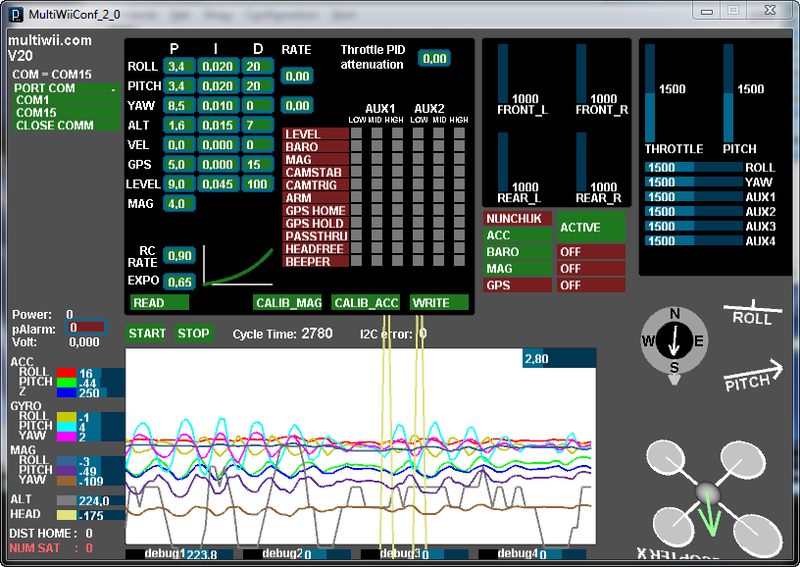
PID (Пропорционально-интегрально-дифференциальный) регулирование является основным методом используемым для стабилизации квадрокоптера.
Пропорциональня P = немедленная коррекция: чем дальше от нас (значения), тем больше делается коррекция
Интегральная I = сверхурочная или постоянная коррекция: если мы не в состоянии добиться результата дополнительной коррекции.
Дифференциальная D = легкая коррекция: коррекция быстрая, замедлим ее немного, что бы избежать перерегулировки.
Вот видео настройки PID на контроллере CC3D в ПО OpenPilot.
Подстройка PID в поле показана на видео ниже.
А общие правила настройки PID можно сформулировать следующим образом:
Rate p — определяет сколько мощности дать на преодоления инерции рамы — угловой скорости по питчу и ролу — чем инертнее рама и меньше тяга винто-моторной группы тем больше.
Rate d — определяет дозирование энергии на раскрутку и торможение пропеллера — чем больше диаметр пропеллера и меньше тяга мотора тем параметр больше
По донастройке PID`ов (n.ybyue) есть несколько советов:
Если обнаруживаете осциляции — увеличивайте rate d.
Если аппарат ведет себя «как пьяный» то одновременно и rate p и rate d по 10%.
Раскачка бывает нескольких видов — «мелкодрожащая» когда моторы меняют свой тон многократно в течение секунды и «висит как на струне мелко дрожа» — это перекачанный rate p.
Если аппарат трудно взлетает любой ветерок его плавно отклоняет из стабильного положения (ведет себя как брошенная на пол круглая крышка — волной по окружности — унитазит квадрокоптер) — это недостаточный rate p.
Если висит ровно, ветра нет, а он чуть чуть дергает то одним лучом, то другим, раз в секунду, то вероятно великоват rate d.
Если аппарат принудительно немного качнуть стиком, а он вместо того чтобы выполнить маневр в одно движение делает один-два затухающих качка — это значит маловат rate d.
Внимание!
Не советуется ускорять процесс увеличивая пид более чем на 10% за раз очень легко пролететь нужный порог и потом уже начинаются неожиданные явления типа внезапных рывков
Похожие статьи:
Видеоподборки про RC моделизм → Прошивка и настройка Skyline32,Naze32 в Cleanflight
Видеоподборки про RC моделизм → Расходы, экспоненты, суперэкспо для начинающих
Инструкции для квадрокоптеров → Настраиваем PID с пульта (Raceflight)
Инструкции для квадрокоптеров → Борьба со сносом в CC3D
Видеоподборки про RC моделизм → VLOG Настраиваю PID тестирую новый гоночный квадр.
Видеоподборки про RC моделизм → INAV на ЛК ,PID tuning
Инструкции для квадрокоптеров → Видео по настройке PID на квадрокоптере
FPV и Камеры для квадрокоптера → Как заставить работать MinimOSD micro с CC3D+CleanFlight?
Обсудить на форуме
Нет комментариев. Ваш будет первым!
При эксплуатации дрона/коптера могут возникнуть следующие неполадки:
• Коптер выходит из режима удержания позиции в пространстве по спутникам (GPS Mode);
• Коптер «сдувает» с места ветром;
• Коптер летает не ровно, по дуге, «туалетит» при висении;
• На экране появляются надписи Compass Error и Exit P-GPS Mode;
• Камера не держит ровно горизонт;
Такие проблемы у дрона/коптера могут встречаться при намагниченности его компаса. Намагничивание компаса происходит:
1) после контакта с магнитами или намагниченными предметами;
2) при полете рядом с массивными металлическими объектами (ЛЭП, автомобильные парковки, вышки и т.д.).
3) при прохождении рентгеновских камер в аэропорту;
4) полет внутри помещений с большим количеством металла (производственные цеха, заводы, склады)
Для устранения данных проблем необходимо провести размагничивание дрона/коптера. Основной способ размагничивания заключается в воздействии на магнитные материалы переменным магнитным полем с уменьшающейся амплитудой. В качестве источника переменного магнитного поля обычно используют электромагнит. Уменьшение амплитуды магнитного поля, действующего на объект размагничивания, можно обеспечить уменьшением амплитуды тока в электромагните, либо, в более простых случаях, увеличением расстояния между электромагнитом и размагничиваемым объектом.
Что дает размагничивание и сброс компаса к заводским настройкам?
1) Ровный полет коптера без виляний. Вам не нужно все время подруливать и корректировать направление полета коптера. Отклонил стик вперед — полетел ровно вперед.
2) В 90% случаев камера перестает «терять» горизонт при поворотах коптера. В остальных 10% случаев, для устранения этого эффекта необходимо дополнительно откалибровать IMU и сделать автокалибровку подвеса.
3) Более точное удержание позиции коптера в режиме GPS, даже в сильный ветер. Пропадает эффект спирального движения коптера когда он «унитазит».
4) Управление коптером становится более предсказуемым и отзывчивым. Пропадает страх отлетать на далекие расстояния — за пределы визуальной видимости коптера.
Смотрите также: рамка размагничивания.
На чтение 11 мин. Просмотров 29 Опубликовано 04.08.2022
Все дело в ограничении дальности, которое сделано в целях безопасности, чтобы дрон успел вернуться до критического разряда батареи. Значит дело только в емкости акб дрона, если увеличить без значительного увеличения веса, можно и на 3-4 км летать, конечно после снятия запрета на дальность. А это пока еще проблема в старых прошивках, потому хочу взять новую версию MAX1 и посмотреть что там наколдовали китайские кулибины (подозреваю, что это просто маркетинговая замануха).


При эксплуатации дрона/коптера могут возникнуть следующие неполадки:
• Коптер выходит из режима удержания позиции в пространстве по спутникам (GPS Mode);
• Коптер “сдувает” с места ветром;
• Коптер летает не ровно, по дуге, “туалетит” при висении;
• На экране появляются надписи Compass Error и Exit P-GPS Mode;
• Камера не держит ровно горизонт;
Такие проблемы у дрона/коптера могут встречаться при намагниченности его компаса. Намагничивание компаса происходит:
1) после контакта с магнитами или намагниченными предметами;
2) при полете рядом с массивными металлическими объектами (ЛЭП, автомобильные парковки, вышки и т. 3) при прохождении рентгеновских камер в аэропорту;
4) полет внутри помещений с большим количеством металла (производственные цеха, заводы, склады)
Для устранения данных проблем необходимо провести размагничивание дрона/коптера. Основной способ размагничивания заключается в воздействии на магнитные материалы переменным магнитным полем с уменьшающейся амплитудой. В качестве источника переменного магнитного поля обычно используют электромагнит. Уменьшение амплитуды магнитного поля, действующего на объект размагничивания, можно обеспечить уменьшением амплитуды тока в электромагните, либо, в более простых случаях, увеличением расстояния между электромагнитом и размагничиваемым объектом.
Что дает размагничивание и сброс компаса к заводским настройкам?
1) Ровный полет коптера без виляний. Вам не нужно все время подруливать и корректировать направление полета коптера. Отклонил стик вперед – полетел ровно вперед. 2) В 90% случаев камера перестает “терять” горизонт при поворотах коптера. В остальных 10% случаев, для устранения этого эффекта необходимо дополнительно откалибровать IMU и сделать автокалибровку подвеса. 3) Более точное удержание позиции коптера в режиме GPS, даже в сильный ветер. Пропадает эффект спирального движения коптера когда он “унитазит”. 4) Управление коптером становится более предсказуемым и отзывчивым. Пропадает страх отлетать на далекие расстояния – за пределы визуальной видимости коптера.
Помогите, пожалуйста, понять почему коптер очень сильно унитазит и идёт в разнос при включении RTH или NAVPOSHOLD. Это мой первый коптер. Matek F405-SE
Emax ECO 1700kv
Gemfan Flash 7042
QczekLRS 2. 1
сборка 4S1P на коричневых 18650. radiomaster tx18sустановлен inav 2. но те же проблемы были на inav 2. 1сорбираю по видео RCSchoolmodels:пробелма выглядит так:
армлюсь, включаю удержание по барометру, компасу и GPS. поднимаюсь на 3-4 метра, отлетаю от себя на допустим 10, вроде не ведёт его. не как вкопанный стоит, но более-менее всё хорошо. переключаю на RTH, коптер начинает ровно вверх набирать заданные 60 метров. потом начинает идти к точке посадки и тут его начинает вращать по спирали, увеличивая радиус всё больше и больше. он опускается, набирая всё больший радиус, мне становится страшно от угла крена и радиуса спирали и я выключаю RTH. Иногда он замирает в точке, а иногда продолжает спираль, но уменьшая радиус, тогда я выключаю фиксацию по GPS и он перестаёт унитазить. Дальше его немного сносит ветер и я сажаю его стиками. Курсовой камеры пока нет, поэтому видео показать не могу. Есть только логи с telemetry viewer и чёрного ящика. GPS очень китайский NEO-M8N ( www. aliexpress. com/item/32908773973. html ) , совмещён с компасом и закреплён на упаковку от мотора – но видит 16 спутников и HDOP 0. 8Первая попытка включить RTH чуть не увенчалась потерей дрона – он поднялся в городе на 200 с чем то метров и улетел в сторону на 400м, хорошо,
что я сообразил выключить RTH и по приборам кое как вернул его, и повезло, что батарей хватило, а то при наборе высоты ток был 20А и просадка до 8вольт на пак. Подскажите, пожалуйста, что я сделал абсолютно неправильно, что у него такое поведение?
сам спросил – сам отвечу – кажется проблема в наводке на компас. потому, что на столе пробую даже при 2,5А от провода АКБ наводка идёт. а что говорить при 20А.
Про INAV есть, но в ветке самолетов.
может и конфиденциальная, дело ведь не в inav, а в недостатке знаний и опыта и поэтому неправильно собранном железе 😃
с другом это выяснили – он держал коптер с пропеллерами, а я добавлял газ с пульта и смотрел на положение коптера в inav configurator.
Вот, у меня 18650 были в 0см от gps+компаса 😉 А Саша все прояснил
Вот, у меня 18650 были в 0см от gps+компаса А Саша все прояснил
Даже не понятно почему был 3. 0 и тут резко 4. 0, а кардинального ничего нету.
Опять переписали фильтры и вроде не первый раз по новой пишут фильтры.
А это разве плохо для проекта?
А из нового пару косметических правок, добавок.
Наверное, трудно назвать это косметическими правками и, скорее всего, выглядит несколько несоответствующе по отношению к разработчикам.
PS
Извиняюсь за автоперевод, но для нормального мало времени
Улучшения миссии WP
Несколько миссий могут быть загружены в контроллер полета, и миссия может быть выбрана для выполнения с помощью OSD, Stick Command или Планировщика миссий. Многозадачность поддерживается конфигуратором inav и планировщиками миссий mwp.
Количество путевых точек
Миссии на лету
В INAV 4. 0 добавлена возможность создавать миссию «на лету» во время полета с использованием позиций самолета.
INAV 4. 0 добавляет путевые точки Fly-by-home. Это путевая точка, местоположение которой устанавливается в исходное положение во время постановки на охрану. Изменения с неподвижным крылом
В iNav 4. 0 появился режим парения. Дополнение отлично подходит для людей, которые летают на планерах. Режим парения добавляет модификатор, который вы можете использовать, чтобы изменить поведение курса, круиза или удержания позиции (праздношатание). Когда он включен, он отключает контроль высоты и позволяет режиму Angle свободно плавать по тангажу, позволяя самолету свободно парить.
Двухэтапный подъем сначала для RTH
Это изменение позволяет разделить фазу набора высоты первого RTH на две отдельные части. Это полезно для пилотов, которые хотят подняться первыми, чтобы преодолеть потенциальные препятствия. Но, не хочу тратить энергию, улетая из дома. Это позволяет установить высоту первого этапа набора высоты. Как только он достигнет или превысит эту высоту, самолет повернет домой и продолжит набор высоты до высоты RTH. Дополнительную информацию см. в iNav Wiki. Автонастройка больше не настраивает P и I
В iNav 3. 0 часто были автонастройки, что приводило к слишком высоким P и I. Кроме того, D вообще не настраивался. Добавлены новые PID по умолчанию, которые будут работать на всех размерах плоскостей ( #1390 ). Это должно дать хорошие результаты с автонастройкой, которую затем можно точно настроить на ваш самолет.
В INAV 4. 0 есть пара важных изменений в том, как фильтруются гироскопы и D-term. В основном они затрагивают пилотов мультикоптеров.
- Фильтр Калмана, также известный как Unicorn Filter, включен по умолчанию.
- Настройка Unicorn Filter упрощена: вы настраиваете только добротность. Параметры размера окна и резкости удалены
- Динамический режекторный фильтр, также известный как матричный фильтр, включен по умолчанию.
- Матричный фильтр был переработан и упрощен. Теперь вы устанавливаете только минимальную частоту и добротность
- Разрешение матричного фильтра теперь в 4 раза выше, чем у INAV 3.
- Статическая выемка гироскопа была удалена
- Первый тип LPF D-term изменен на PT2, а второй LPF D-term отключен — это дает ту же фильтрацию, что и раньше, но с меньшим количеством настроек, о которых нужно беспокоиться.
- Фильтр Альфа-Бета-Гамма удален.
- Предсказатель Смита включен по умолчанию новыми настройками по умолчанию конфигуратора.
Улучшения черного ящика
Blackbox теперь всегда регистрирует компоненты Control Derivative и Feed Forward , а также целевую скорость в градусах в секунду. Для полного использования этих функций требуется последняя версия INAV Blackbox Explorer.
Новая команда blackbox позволяет указать, какие поля черного ящика записываются для экономии места и полосы пропускания.
Добро пожаловать на Форум по станкам с ЧПУ!


- Форум
Форум - Пользователи
Пользователи
Квадрокоптер Hubsan Zino Pro – отзывы которым можно доверять. Квадрокоптер Hubsan Zino Pro имеет множество отрицательных и положительных отзывов владельцев. Написать отзыв без регистрации► Показать только: плохие отзывы о Квадрокоптер Hubsan Zino Pro► Используйте новые промокоды и покупайте дешевле!—
Квадрокоптер Hubsan Zino Pro – можно купить на много дешевле если использовать кэшбэк. Обычно магазины не афишируют возможность получения кэшбэка, а он может достигать 17% от цены товара, и это не баллы и бонусы, а настоящие деньги которые поступят на вашу карту или баланс телефона. Для этого сначала выберите магазин где вас устраивает цена. Магазинов огромное количество, больше 700. Затем нажмите кнопку “Активировать кэшбэк”, совершайте покупку в магазине как обычно, кэшбэк зачислится в течение 10 мин. Дарим Вам первый кэшбэк 150р по промокоду: sdx548 Выбрать: Магазины с кэшбэком 776 шт
— 5, ANDREI S. — 1, ник 2. — 5, Den V. — 1, Работа
— 5, владимир о. — 5, Шилов Михаил
— 5, AEF
— 2, Михаил
— 5, Белехов Михаил
— 5, имя х. — 1, Yaroslav Plaziy
— 3, Белехов Михаил
— 1, Работа
— 3, Дмитрий А. — 5, Федя Гайдуков
— 5, Дмитрий ИвановНаписать отзыв без регистрации
Квадрокоптер Hubsan Zino Pro отзывы
Хотите купить Квадрокоптер Hubsan Zino Pro? Прочитайте отзывы написанные посетителями сайта. Администрация сайта не несет отвественность за возможно жесткое содержимое отзывов о Квадрокоптер Hubsan Zino Pro.
Статьи от ОТЗЫВ24



Информация не является публичной офертой. Торговые марки принадлежат их владельцам.
Как заставить коптер висеть на одном месте
Самая сложная фигура высшего пилотажа на коптере — это висеть на месте. Про хорошо настроенный коптер говорят “висит как прибитый!”.
Наверняка вам знакома ситуация, когда коптер уводит в сторону как только отпускаешь стики, «гуляет» вверх-вниз, вплоть до касания земли или его упорно сносит с точки и его невозможно заставить висеть.

Почему коптер постоянно сносит в сторону, и он не висит на одном месте? Контроллер имеет датчики для выравнивания по горизонту, но не имеет датчиков для ориентации в пространстве. Для четкого висения в точке необходим магнитометр для нахождения магнитного полюса планеты и датчик позиционирования GPS. Таким образом, коптер не знает, что он смещается относительно Земли и «уплывает».
При правильно установленном и настроенном GPS, коптер хорошо висит на месте, а при подаче команд со стиков скорость жестко ограничена настройками по всем направлениям.
Что же делать? Откалибровать компас. Для этого нужно несколько раз щелкнуть переключателем S1 (см. фото).
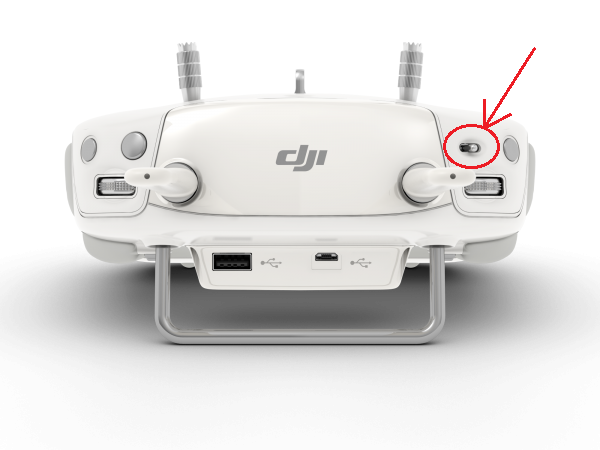
На задних лучах желтыми огнями загорятся лампочки. Теперь необходимо взять коптер в руки за шасси, чтобы камера смотрела прямо, и сделать полный круг, пока огни на лучах не станут зелеными.
После чего перевернуть дрон так, чтобы камера смотрела вниз и снова не спеша покрутиться на месте до зеленого мигания. Если вы не добились этого результата с первой попытки, то следует сделать те же круги повторно до нужного результата.
Во время операции по калибровке компаса сигнальные огни с зеленого цвета могут переключиться на желтый. Это означает, что коптер потерял один из спутников. В принципе это не страшно, но для надежности все-таки добейтесь того, чтобы диоды мигали зеленым постоянно.
Еще один совет — не летать в ветреную погоду (3 м/с), чтобы помимо всего прочего коптер не сносило ветром. Если потеряется сигнал GPS или возникнет ошибка компаса — он бодро уплывет по ветру.
Нередки случаи, в которых ошибка компаса постоянно возникает при повороте коптера на запад. Если Вы опытный пилот и сможете справиться с улетающим без стабилизации коптером — это не страшно. Но вообще такой случай был признан гарантийным.
Что же будет, если игнорировать калибровку компаса? Часто на форумах это явление называют «коптер унитазит». На треке ниже видно, как неоткалиброванный коптер по спирали улетел от своего хозяина «в Китай» — связь с дроном пропала прямо над шоссе.
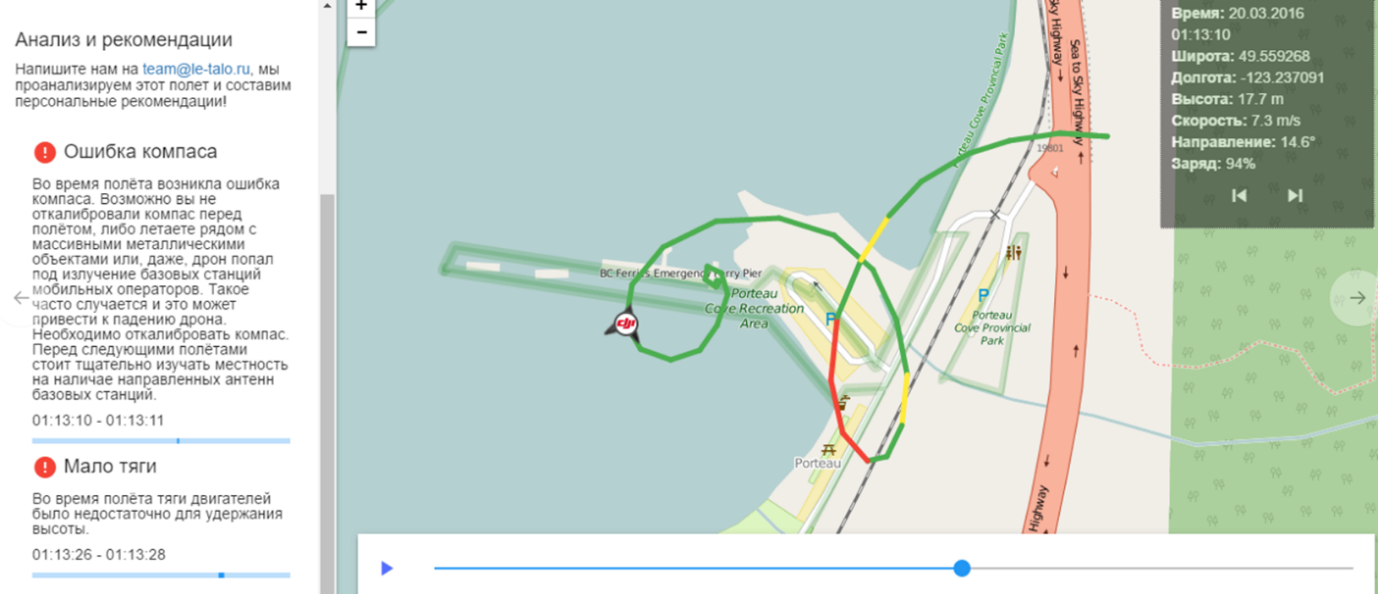
Проведите диагностику своего коптера, узнайте о существующих проблемах и получите рекомендации по их устранению!
Performance, security and DDoS protection by Cloud‑Shield