Оглавление
- Как устранить распространенные ошибки и неисправности на дронах DJI Mavic, Phantom или Phantom 4 PRO?
- Ошибка: «Недостаточно силы/ESC» и «Максимальная достигнутая нагрузка»
- Ошибка DJI Mavic: RTH (Return-To-Home) возвращение домой работает неправильно
- Что такое Home Point?
- Советы по полетам на квадрокоптере
- Ошибка: квадрокоптер DJI отключается и теряет связь с пультом управления
- Ошибки управления дроном вызванные смартфоном
- Дрон отключается после обновления прошивки
- Что делать теряется связь квадрокоптером во время полета?
- Приложение DJI Fly отключается при полете
- Пульт дистанционного управления отключается при полете
Квадрокоптеры от DJI — потрясающие дроны. Будь это серия Phantom, Phantom 4 PRO или Mavic и эти беспилотники будут летать годами без каких-либо проблем. Тем не менее в процессе эксплуатации могут возникать разного рода ошибки и неисправности. Среди которых встречаются разъединение, беспорядочный полет, проблемы с приложением, функция возврата (RTH) не работает или получает предупреждения и ошибки.
Всэ эти проблемы с дронами DJI требуют устранения неполадок но для этого необходимо выяснить, что произошло.
Некоторые из наиболее распространенных проблем например с Mavic Mini — это ошибка «Недостаточно силы / ESC» и «Максимальная достигнутая нагрузка». Другие проблемы включают в себя отключение от пульта дистанционного управления или приложения Fly, отлет или неправильная работа функции возврата дрона домой.
Мы рассмотрим возможные ошибки и пути к их исправлению. Некоторые из этих проблем могут быть вызваны многими переменными и зачастую их вполне устранить своими силами. Тогда как другие неисправности могут потребовать ремонта вашего дрона.
Ошибка: «Недостаточно силы/ESC» и «Максимальная достигнутая нагрузка»
Ошибка DJI Mavic: Power Load Reched и Not Enough Force/ESC error или Недостаточно Force/ESC предупреждение или ошибка о максимальной мощности нагрузки может быть довольно опасной.
Mavic Mini может даже сбросить высоту и даже разбиться. Во многих случаях дрон будет падать и восстанавливать свою позицию. Однако если вы летите очень близко от земли, Mavic может резко упасть. Это довольно страшно и вам повезет если ваш дрон не окажется поврежден.
Есть много причин которые могут вызвать эту проблему и на момент написания у DJI не было однозначного ответа или решения на это.
Однако многие владельцы сами решили эту проблему или поняли что может являться причиной.
Предупреждение заключается в том, что дрон не получает достаточного питания и на электронных контроллерах (ESC) генерируется сообщение об ошибке.
Это сообщение указывает на проблему с ESC (электронными регуляторами скорости) и двигателями.
Проблемы с питанием могут также указывать на неисправный аккумулятор. Тем не менее от DJI по этому поводу не получилось узнать ничего определенного.
Эта проблема может быть исправлена различными способами.
Рассмотрим на примере DJI Mavic Mini.
Максимальное сопротивление ветру — это проблема возникающая из-за того что квадрокоптер летает при ветре, превышающем 28,8 км/ч, что является максимальной скоростью ветра для дрона.
28,8 км/ч — это уровень 4 по шкале Бофорта, что означает умеренный ветер. Многие из этих предупреждений недостаточной силы/ESC происходят на приличной высоте. Несмотря на то, что на земле может быть спокойно, на высоте может быть ветер который может стать серьезной помехой для полета.
Читайте: Как летать на квадрокоптере при сильном ветре: Советы
Полет на полной скорости — если вы летите на полной скорости и если есть небольшой встречный ветер, это также может привести к ошибке. Двигатели при такой ситуации работают в максимальных режимах. Ослабьте газ и посмотрите, исчезнет ли предупреждение.

Очень быстрый подъем в P-режиме. Возникает ли проблема при быстром подъеме. Если это так, то это потому, что во время полета вверх дрон сталкивается с высоким сопротивлением и контроллер полета обнаруживает это выдавая всплывающее сообщение ESC о недостаточной мощности.
Максимальная высота полета — полет на максимальной высоте или близко к ней для. По мере набора высоты воздух становиться менее плотным (это связано с тем что гравитация притягивает к себе молекулы воздуха к земле). И на большой высоте двигатели беспилотников должны работать в более интенсивном режиме чтобы удерживать беспилотник в воздухе.
Читайте: На какую максимальную высоту может подняться квадрокоптер?
Защита винтов может вызывать проблему — Снимите защитные кожухи винтов, если они прикреплены. Некоторые пилоты решили эту проблему сняв защитные винты.
Читайте: Может ли квадрокоптер долететь до космоса и прилететь обратно?
Неисправные пропеллеры. Многие дроны Mavic Mini, получившие предупреждение «Недостаточно силы / ESC» и «Достигнута максимальная мощность нагрузки» были исправлены простой заменой пропеллеров. На рынке представлено много разных пропеллеров Mavic Mini.
Изучите пропеллеры. Даже если вы не видите какой-либо ошибки, идите вперед и измените их. Они могут быть небольшим дефектом одного или нескольких пропеллеров, что даже не заметно на глаз. Эта проблема была исправлена для многих владельцев путем перехода на новый комплект пропеллеров.
Некоторые пилоты замечали что лопасть пропеллера слегка трется о дрон. Поэтому, когда Mavic Mini выключен, раскрутите винты и посмотрите, происходит ли это.
Кроме того DJI рекомендует заменять полный набор а не только 1 пропел.
Неисправная батарея — Если у вас есть запасные батареи замените и посмотрите, появляется ли предупреждение Not Enough Force или Not Enough Power / ESC. Если ошибка пропадет то это может указывать на проблемы с аккумулятором.
Полет в режиме S или P — предупреждение появляется только в режиме S или P. Это один из вопросов, который всегда задает служба поддержки DJI и может указывать на то где по их мнению существует проблема. Если это происходит только в одном из режимов это может указывать на проблему с программным обеспечением, а не с оборудованием. Выполните обновление программы.
Обновите приложение DJI Fly — убедитесь, что у вас установлена последняя версия приложения DJI Fly. Как правило с новой прошивкой многие ошибки в программном обеспечении устраняются.
Понижение/обновление прошивки — предупреждение Not Enough Force/ESC неоднократно исправлялось, сначала понижая версию прошивки а затем обновляя ее снова.
Вы можете понизить версию прошивки с помощью приложения DJI Assistant 2 на своем компьютере. Если это устраняет проблему то проблема изначально была в поврежденной прошивке.
Ошибка DJI Mavic: RTH (Return-To-Home) возвращение домой работает неправильно
Существуют различные причины неправильной работы функции Mavic Mini Return-To-Home. Например вместо возвращения в исходную точку дрон совершает аварийную посадку. Вот некоторые из причин по которым это может происходить
Что такое Home Point?
Домашняя точка по умолчанию является первым местом, где дрон получил сильные сигналы GNSS (данные о местоположении). В приложении DJI Fly App белый значок GNSS будет содержать не менее 4 белых полос. Индикатор состояния Mavic Mini быстро мигает зеленым после того, как Home Point была записана.
Домашняя точка может быть записана неправильно — с версиями прошивки, предшествующими v01.00.0400, можно было взлетать и летать со слабым сигналом GPS или при плохом освещении. Если у вас слабый сигнал GPS на взлете, то домашняя точка будет записана неправильно.
Домашняя точка будет записана, когда дрон обнаружит сильный сигнал GPS это будет означать то, что дрон вернется в другую домашнюю точку, чем в ту которую вы хотели.
В версии встроенного ПО v01.00.0400 была добавлена функция отключения взлета при слабом сигнале GPS (GPS <8) и недостаточном освещении окружающей среды. Эту функцию можно отключить вручную (требуется приложение DJI Fly v1.0.4 или новее).
Слабый или недоступный GPS. Несмотря на то что у вас может быть записана домашняя точка при взлете, ваш дрон не сможет вернуться в исходную точку, если сигнал GPS станет слабым или недоступным. Очень важно летать в местах, где сигнал GPS сильный.
Заряд батареи — Батарея разрядилась до уровня, при котором она не может позволить вернуться квадрокоптеру в исходную точку и вместо этого он будет вынужден совершить аварийную посадку.
Полет против ветра — может сильно замедлить работу любого дрона и довольно быстро разрядить аккумулятор.
Откалибруйте компас и IMU — если ваш дрон не возвращается в исходную точку, возможно он не знает своего точного местоположения из-за электромагнитных помех или у него возникают проблемы с правильным поиском глобальных спутников.
Откалибруйте компас. Несмотря на то, что IMU касается позиционирования калибровка IMU (инерциальный измерительный блок)также не является плохой идеей.
Читайте: Как правильно делать калибровку квадрокоптера?
Потерянное соединение с пультом дистанционного управления — Функция отказоустойчивого RTH автоматически активируется на многих моделях после потери сигнала пульта дистанционного управления в течение более 11 секунд. Тем не менее, это зависит от того, была ли домашняя точка была успешно записана в первую очередь.
Сильный ветер — Если дрон летит обратно в исходную точку с определенной скоростью. Если ветрено, дрон не сможет достичь конечной точки вовремя и совершит аварийную посадку.
Читайте: Как не потерять свой квадрокоптер и что делать если это случилось?
Высота над уровнем моря — если вы не летаете на открытой местности, может быть важно установить другую высоту, чем высота по умолчанию 20 метров (65,61). Полеты в местах, где есть деревья, канавы, высокие кусты и т. Д. Вы можете установить другую высоту RTH в приложении DJI Fly.
Советы по полетам на квадрокоптере
Откалибруйте компас — особенно если вы летите в новой области, которая находится на большом расстоянии от последнего места, где вы летали. Также выполните калибровку, если вы получили сообщение в приложении DJI Fly для калибровки. Обязательно откалибруйте компас после жесткой посадки и где нет физического повреждения дрону.
Не летайте — пока у вас слабый сигнал GPS.
Обновление прошивки — проверьте и обновите прошивку для дрона и пульта дистанционного управления. Кроме того, установите последнее приложение DJI Fly, когда оно станет доступным.
Электромагнитные помехи. Многие электромагнитные помехи могут вызвать проблемы с компасом квадрокоптера и возможностями полета, в том числе его точное местоположение в небе. Следите за электромагнитными помехами в той области, где вы будете летать.
Читайте: Как запускать квадрокоптер в городе с электромагнитными помехами?
ЭМП — это помехи, создаваемые одним электрическим устройством другому электромагнитными полями. Электромагнитные помехи (EMI), также называемые радиочастотными помехами (RFI) в радиочастотном спектре, представляют собой помехи, создаваемые внешним источником, который воздействует на другую электрическую цепь.
Примерами EMI являются линии электропередач, мачты сотовых телефонов, здания из армированной стали, электрические кабели, мосты, железнодорожные линии, автомобили и электрические устройства.
Ошибка: квадрокоптер DJI отключается и теряет связь с пультом управления
Существует множество причин, по которым дрон отключается и теряет связь с пультом дистанционного управления или приложением Fly.
Эти разъединения и отлет могут быть вызваны различными источниками такими как: сам квадрокоптер, пульт дистанционного управления, смартфон, планшет или EMI. Поэтому для устранения проблем с полетом необходимо рассмотреть ряд действий:
Вы не вошли в приложение DJI Fly
Когда вы устанавливаете приложение DJI Fly на свой смартфон вам будет предложено войти или зарегистрироваться. Если вы не вошли в систему дальность полета будет ограничена как по высоте, так и по дальности, пока вы не активируете свой логин. Проверьте, возможно вы просто всего вы не вошли в систему.

Если вы пропустили этот шаг после установки приложения DJI Fly, то вы можете войти в систему, нажав на профиль и затем нажав «Войти».
Заполнение Кэш приложения DJI Fly
Файлы кэша могут заполнить память и даже стать причиной ошибки. В приложении DJI Fly есть 2 настройки для настроек кеша.
- Кэш при записи
- Максимальная емкость кеша видео
При отключении полезно отключить функцию «Кэширование при записи». Вы можете найти это в Настройки> Камера> Расширенные настройки камеры. Переместите ползунок влево и выключите его.
В приложении DJI Fly есть 4 кеша, которые можно очистить;
- Видео кеш
- Фото кеш
- Музыкальный кеш
- Авиационный кэш
Вы можете очистить кэш в приложении DJI Fly, нажав «Профиль»> «Настройки»> «Очистить кэш».
Нажмите на каждый, а затем нажмите «подтвердить», чтобы очистить кэш.
Ошибки управления дроном вызванные смартфоном
Многие из проблемы с отключением дронов вызваны смартфоном или планшетом, на котором установлено приложение DJI Fly.
На смартфонах установлено множество приложений, и они постоянно работают, даже когда мы ими не пользуемся. Они постоянно подключены к Интернету, провайдеру сотовых телефонов, извлекают данные, уведомляют и пингуют сеть.
Чтобы летать на дроне без проблем, вы должны убедиться, что ваш смартфон или планшет работает оптимально.
В отношении смартфонов и планшетов рекомендуется оптимизировать использование уведомлений от различных приложений (Facebook, Twitter, Instagram, WhatsApp и т. Д.) Во время полета. Отключите обновления приложений во время полета. Удалите неиспользуемые приложения, так как они занимают пространство, память и мощность процессора.
Существуют программы для оптимизации вашего смартфона и планшета. Используйте их для оптимальной работы смартфона или планшета.
Если ваш смартфон работает неоптимально, то открытие приложения DJI Fly и запись видео во время полета может привести к большей нагрузке на процессор или заполнить его память. Если смартфон работает медленно, он может легко разорвать соединение.
Карты памяти могут быть проблемой потери связи
Отключении дрона от пульта дистанционного управления или приложения DJI Fly может возникнуть от проблем, вызванных картой памяти micro SD.
Эти карты micro SD могут быть повреждены физически или файловая система может быть повреждена на карте. Даже видео или фотография могут испортиться на микро SD-карте.
Читайте: Обзор лучших карт памяти: SD, microSD, XQD и CF как выбрать?
Если вы используете карту памяти micro SD для чего-то другого или на ней есть другие файлы и папки то при установки ее в дрон это может вызвать проблему при попытке записи на нее. Карта micro SD все еще может работать, но ее работа будет не идеальна и может вызывать помехи в работе квадрокоптера.
Выньте карту micro SD и попробуйте летать без нее.
Если вы не отсоединились, значит, проблема в карте памяти micro SD. В настройках камеры приложения DJI Fly вы можете отформатировать карту micro SD.
Перед форматированием карты памяти может потребоваться скопировать существующую информацию (файлы, фотографии и видео) с карты на компьютер.
Если по-прежнему происходят разрывы после форматирования карты SD просто замените ее.
Пульт управления вызывает ошибку соединения
Проверьте свой пульт дистанционного управления. Убедитесь, что порты и кабели чистые. Грязь или пыль могут очень легко попасть в порты.
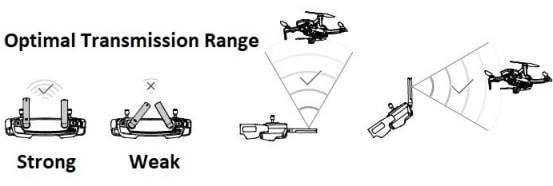
Один из самых простых способов отключить дрон от пульта дистанционного управления — удерживать его и антенну в неправильном направлении.
Чтобы получить самый сильный сигнал передачи, держите пульт там где дрон находится в небе. Ваша антенна дистанционного управления должна быть направлена правильно.
Слабый сигнал или электромагнитные помехи, приводящие к отключению дрона
Если вы летите на большое расстояние, сигнал передачи будет слабее. Когда сигнал становится слабее, становится вероятным отключение вашего квадрокоптера от приложения DJI Fly или пульта дистанционного управления.
Тем не менее никогда не стоит доводить дальность полета или высоту до предельных значений.
Кроме того, полет в тумане, при дожде, очень пасмурной погоде или плохом освещении может вызвать нарушения связи и проблемы с полетом.
Дрон отключается после обновления прошивки
Проблема так же может быть вызвана неправильной установкой новой прошивки или ошибкой в ней.
Используя приложение DJI Assistant 2, установленное на компьютере подключаете дрон и возвращаетесь к более ранней версии прошивки.
После понижения версии прошивки вы должны запустить свой квадрокоптер, чтобы увидеть, решены ли проблемы с полетом. Если это так, вы можете попробовать обновить еще раз или подождать до нового обновления прошивки.

Все дроны DJI содержат регистратор полета. Информация о полетных данных, включая телеметрию, статус самолета и другие параметры, автоматически сохраняется во внутреннем регистраторе на вашем дроне DJI.
К этим данным можно получить доступ с помощью программного обеспечения DJI Assistant 2. Эта информация также может быть отправлена в DJI для устранения проблем с полетом.
Что делать теряется связь квадрокоптером во время полета?
Если пульт дистанционного управления все еще подключен и это просто приложение DJI Fly которое потеряло сигнал, выполните следующие действия;
Закройте и снова откройте приложение DJI Fly — уберите руки с пульта и дайте вашему квадрокоптеру зависнуть. Закройте приложение DJI Fly и вернитесь к нему. Существует большая вероятность, что приложение Fly снова подключится к дрону.
Приложение DJI Fly отключается при полете
Если дрон находится на достаточном расстоянии, вы можете предпринять некоторые действия для повторного подключения, пока он находится в режиме RTH. Вы можете попробовать следующее:
- Попробуйте приблизиться в направлении Mavic Mini.
- Закройте приложение DJI Fly и снова войдите.
- Остановите и запустите WiFi на вашем смартфоне.
- Перезагрузите телефон или планшет.
Пульт дистанционного управления отключается при полете
Если у вас нет управления вы не сможете управлять своим дроном, даже если сможете его увидеть. Ваш дрон должен запустить режим точки возврата Failsafe Return-To-Home, который он установил сразу после взлета.
Если дрон улетел на большое расстояние, вы можете помочь пульту дистанционного управления подключиться. Вот несколько советов.
Двигайтесь к своему квадрокоптеру, сокращая расстояние между пультом и дроном. Если вы находитесь рядом с работающим двигателем, генератором, линиями электропередачи и т. д., Это может ослабить сигнал, приводящий к отключению. Поэтому отойдите от любых помех в направлении дрона, и он может просто переподключиться.
Проверьте направление антенны пульта дистанционного управления. Направлена ли антенна в правильном направлении. Если дрон находится довольно высоко в воздухе, вам нужно изменить угол наклона пульта дистанционного управления, чтобы антенна была направлена прямо на него. Вам также необходимо изменить угол, на котором вы держите пульт дистанционного управления, если вы стоите на возвышенности и летите на дроне вниз.
Выключите и снова включите пульт — стоит попробовать, так как это займет всего несколько секунд.
Возврат к домашнему безотказному режиму — если вы летите в широком открытом пространстве без каких-либо препятствий на пути. Режим RTH вернет квадрокоптер обратно в исходную точку. Это очень полезная функция особенность.
![]() Загрузка…
Загрузка…

#1
![]()
OFFLINE
Rolck
-

- Пользователи
-
- 4 сообщений
Начинающий летчик


- Город:Тюмень
- Коптер:Mavic air
Отправлено 26 Май 2018 — 07:13
Здравствуйте дорогие пилоты air, произошла такая ситуация. Совершил взлёт пролетел 1000м и выдало ошибку о неисправности мотора и спустя секунд 15 начало заваливать и крутить по окружности еще и при этом сигнал проподал начал набирать скорость сам по себе и находился в крену примерно 30 градусов я уж думал все крушение не избежать, дал газу вперёд максимум вроде стабилизировался и долетел до точки взлета. Покружил на месте полетал вокруг, вроде все нормально как не бывало никаких неисправностей и ошибок так и не понял что случилось)) может у кого были подобные ошибки? Кстати после обновления ошибку о моторчике мне выдавало дважды до этого никогда не было.
начал набирать скорость сам по себе и находился в крену примерно 30 градусов я уж думал все крушение не избежать, дал газу вперёд максимум вроде стабилизировался и долетел до точки взлета. Покружил на месте полетал вокруг, вроде все нормально как не бывало никаких неисправностей и ошибок так и не понял что случилось)) может у кого были подобные ошибки? Кстати после обновления ошибку о моторчике мне выдавало дважды до этого никогда не было.
Сообщение отредактировал Rolck: 26 Май 2018 — 07:17
-
0
#2
![]()
OFFLINE
ydanhill
ydanhill
- Город:Винница
- Коптер:DJI Mavic Air
Отправлено 29 Май 2018 — 10:16
Также была ошибка: Motor current error. Check your propellers and fly with caution.
до обновления на .0400 такого не было, что делать, как летать дальше.. одни пишуть что позже больше не выскакивали ошибки, у других он сразу падал на землю…
и когда приземлился то 3 моторчика были горячие а 1 немного теплый, но это может быть из за того что МА выходил из поворота и одновременно сопротивлялся ветру + садился и по этому 1 моторчик меньше всех работал и МА подумал что какая то проблема с ним и выдал ошибку и при добавлении газу все пропадает так как ток становиться больше..
-
0
#3
![]()
OFFLINE
allexz
allexz
-
- Пользователи
-
- 25 сообщений
Начинающий летчик
- Город:Альметьевск
Отправлено 29 Май 2018 — 04:26
Вот здесь на форуме Dji обсуждают эту проблему:
https://forum.dji.co…147267-5-1.html
Пострадавших много. Dji в курсе и кормит обещаниями обновления.
Сам я пока не сталкивался, но напрягся…
-
0
#4
![]()
OFFLINE
mixerhack
mixerhack
- Город:Dnepr
- Коптер:DJI Mavic Air
Отправлено 29 Май 2018 — 05:07
Там же представитель DJI вешает лапшу на уши, что это ошибочное сообщение софта и на рботу самого аппарата оно не влияет.
-
1
#5
![]()
OFFLINE
Rolck
Rolck
-
- Пользователи
-
- 4 сообщений
Начинающий летчик
- Город:Тюмень
- Коптер:Mavic air
Отправлено 02 Июнь 2018 — 10:12
Короче ребята я незнаю с чем это связано, но когда коптер теряет связь то тут же появляется проблема с моторчиками и начинает вносить в сторону. Какая то фигня с прошивкой)
-
0
#6
![]()
OFFLINE
Micha
Micha
- Город:Саратов
- Коптер:MAVICи
Отправлено 04 Июнь 2018 — 10:45
В выходные удалось вырваться на небольшую двухдневную поездку на велосипедах… Решил погонять Air, на предмет «ошибок мотора»… Прошивка 400… С собой взял Smatree, что бы заряжать аккумы (у меня их 4)… Сразу скажу что Air недолюбливаю… Достался по случаю… Просила дочь, купил… а он у неё не прижился… В общем лежит на полке в коллекции… иногда запускаю «прогуляться»… обновляю по первому требованию… Прочитав о недостатках новой прошивки, подумал что пора пополнить статистику «плохих отзывов»… За всё время излетал 11 батарей… В самых разных режимах… Погода была ветреная… Несколько раз ловил «интерференцию»… сотовые вышки, ЛЭП, ещё какая то фигня… И только один раз выскочила ошибка о максимальных оборотах двигателя… Все писал с экрана, что бы не пропустить ошибку… Буду мучить Хомяка дальше…

Сообщение отредактировал Micha: 04 Июнь 2018 — 11:03
-
0
#7
![]()
OFFLINE
STHD
STHD
-
- Пользователи
-
- 4 сообщений
Начинающий летчик
- Город:Ростов-на-Дону
- Коптер:Mavic Air
Отправлено 04 Июнь 2018 — 12:52
Micha,
ДА вроде ничего страшного. Информирует что «Достигнута максимальная скорость моторов». Ветер говорите был, сопротивлялся наверное?
-
0
#8
![]()
OFFLINE
ivba
ivba
-
- Пользователи
-
- 31 сообщений
Начинающий летчик
- Город:Москва
Отправлено 09 Июнь 2018 — 12:24
Прилетел мне мой Айр по гарантии, обновился сегодня перед первым взлётом и отхватил эту ошибку 
Motor Current Error. Check your propellers and fly with caution.
теперь форумы курю…
-
0
#9
![]()
OFFLINE
AleksAir
AleksAir
-
- Пользователи
-
- 1 сообщений
Начинающий летчик
- Город:Тверь
- Коптер:Mavic Air
Отправлено 09 Июнь 2018 — 09:39
Rolck, да, у меня тоже выскочила такая ошибка в эти выходные. Поднялся метров на 100, оявилось предупреждение ⚠️ . В этот момент я возвращался обратно к точке взлёта на ручном управлении. Летел вперед и одновременно снижался. Как только появилась надпись об ошибке моторов, я сразу отпустил стики. Ошибка пропала. После этооо летал несколько раз, отлетал примерно на 1 км от точки взлётаи поднимался на высоту около 270 метров, ошибка не высвечивалась. Но очень боязно теперь.
-
0
#10
![]()
OFFLINE
Micha
Micha
- Город:Саратов
- Коптер:MAVICи
Отправлено 09 Июнь 2018 — 10:37
STHD, Согласен… это не ошибка… возможно просто стабилизировался и одномоментно вышел на предельные обороты…
-
0
#11
![]()
OFFLINE
fadeeev
fadeeev
-
- Пользователи
-
- 46 сообщений
Начинающий летчик

- Город:Пермь
- Коптер:gji mavic air
Отправлено 10 Июнь 2018 — 02:35
AleksAir,
Поднялся метров на 100, оявилось предупреждение ⚠️ . В этот момент я возвращался обратно к точке взлёта на ручном управлении. Летел вперед и одновременно снижался. Как только появилась надпись об ошибке моторов, я сразу отпустил стики. Ошибка пропала. После этооо летал несколько раз, отлетал примерно на 1 км от точки взлётаи поднимался на высоту около 270 метров, ошибка не высвечивалась.
У меня такая же ситация была. До точки взлета долетел нормально.
-
0
#12
![]()
OFFLINE
Sinit
Sinit
-
- Пользователи
-
- 3 сообщений
Начинающий летчик
- Город:Москва
- Коптер:Mavic Air
Отправлено 16 Июнь 2018 — 04:35
Неделю как купил.
На 9 полёте ничего не предвещало проблем, летал на высоте около 7м недалёко вокруг бассейна. Вдруг выдал Warning: Motor obstructed. Стал заваливаться на левый передний двигатель и рухнул в кусты. Ничего не поломал.
Лог с аирдата во вложении.
Помогите советом — что делать то? Сразу тащить в ремонт, или проверять что-то? До этого 2 года гонял Zerotech Dobby и утопил в Байкале из-за аккумулятора, но в движках был уверен.
Правда добби садился всегда на руку, а тут куда придётся, просто выбираю место ровное, чтобы пропеллерам трава и камни не мешали, но пыльные места были (как во вложении) может попало что в двигатель?
Ещё на картинке видно, что ошибку выдало при пролёте под небольшой ЛЭП. Но до этого пролетал под ней, снимая круг нормально. Не могла она ошибку двигателя спровоцировать?
Прикрепленные изображения
-
0
#13
![]()
OFFLINE
mixerhack
mixerhack
- Город:Dnepr
- Коптер:DJI Mavic Air
Отправлено 18 Июнь 2018 — 05:35
у этого малыша слишком низкая посадка
лучше скадить в руку
взлетать тоже можно с нее
-
0
#14
![]()
OFFLINE
DVishnevskiy
DVishnevskiy
- Город:Москва
- Коптер:Phantom 4 Pro, Mavic Air, Mavic Mini
Отправлено 19 Июнь 2018 — 09:33
Sinit, там написано motor is blocked — блокирован. Скорее всего что-то попало в мотор. У меня на спарке такое было когда один из фиксаторов винта отвалился внутрь мотора. Мотор встал колом. Вытряхнул пластмассину и все потом работало нормально.
-
0
#15
![]()
OFFLINE
Sinit
Sinit
-
- Пользователи
-
- 3 сообщений
Начинающий летчик
- Город:Москва
- Коптер:Mavic Air
Отправлено 19 Июнь 2018 — 05:10
Снял пропеллеры, протряс двигатели, вылетела частичка непонятно чего камень/пластмасса очень маленькая 0,5мм наверное. Но может при падении в кусты попала.
Поменял пропеллеры, погонял низенько пару аккумуляторов, третий уже летал метров на 50.
Все равно нет пока полного доверия , над водой пока гонять не буду.
Ну и видимо нужно трясти перед каждым полетом…
P.S. не стал сегодня на вулкане Этна запускать и правильно сделал, через пару минут пошёл сильный дождь с градом…
-
0
#16
![]()
OFFLINE
Atomic
Atomic
- Город:Moscow
- Коптер:Mavic air
Отправлено 21 Июнь 2018 — 04:36
-
0
#17
![]()
OFFLINE
Gravite
Gravite
-
- Пользователи
-
- 5 сообщений
Начинающий летчик
- Город:Дудинка
- Коптер:Mavic Air
Отправлено 30 Июнь 2018 — 05:16
Сеогодня во время полета когда обратно летел к точке взлета вручную, смотрю коптер в бок сносит немного, ну я старался повернуть его к себе (растояние метров 400 было и высота 35 метров) и тут его так начало колбасить и крутить, я конечно столько кирпичей отложил, в отчаянье нажал кнопку домой на пульте и чудо, дрон стал стабилен и полетел домой ко мне. Потом смотрю оказывается во время виляния дрона была ошибка Not Enough Force/ESC Error (repeated 22 times), что она значит? может во всем виноват боковой ветер? (хотя ветер не сказать чтоб сильный был, программа не ругалась на ветер)
вот лог полета https://app.airdata….in?share=XmEowx
-
0
#18
![]()
OFFLINE
Poster1
Отправлено 30 Июнь 2018 — 08:49
-
0
#19
![]()
OFFLINE
gering7777
gering7777
-
- Пользователи
-
- 2 сообщений
Начинающий летчик
- Город:Ко
- Коптер:Fan
Отправлено 10 Июль 2018 — 11:35
26 июня Mavic Air при облете акватории Невы на разводе мостов потерял управление и с задним левым креном под углом рухнул с 32 метров в воду. Ошибок в пилотировании не допускал. Вылетело предупреждение «Motor current error. Check your propellers and fly with caution», потянул его в точку HOME. Через несколько секунд крен влево, который не компенсировал даже Gimbal . Серия предупреждений «Not Enough Force/ESC Error». и потеря высоты влево назад. Предположительно отказ левого заднего двигателя. Сформировано обращение в поддержку DJI и дилеру 4VISION. Лог прилагаю. Кто что думает по этому поводу. Благодарю
https://yadi.sk/i/0-5d-8Zd3Yze58
-
0
#20
![]()
OFFLINE
storman
storman
-
- Пользователи
-
- 2 сообщений
Начинающий летчик
- Город:Красноярск
- Коптер:phantom 3 pro
Отправлено 10 Июль 2018 — 07:28
Кто может объяснить данный феномен?)
Летел низко, 2-3 метра на полный газ. Коптер резко наклонился на !90! градусов и полетел камнем в землю в другую сторону. И выбил ошибку compass error. Все это дело было за пару секунд, даже сделать нереально было ничего. Это что вообще было? И как этого избежать в дальнейшем? За пару минут до этого я над рекой с такой же высотой летел в полный газ….
Сломало только нижнюю планку, которая досталась с коптером от прошлого владельца, даже лопасти целые — взлетел посадил дрона, подвес отрабатывает, вроде все норм
Вот лог полета:

p.s.: у меня Phantom 3 PRO
прошивка самая последняя что есть на него, приложение тоже
-
0
The new DJI Mavic Mini is a terrific drone and for almost everyone, their drone will fly for years without any issues. However, there are some Mavic Mini’s, which have disconnects, erratic flying, fly away issues, RTH not working or receive warnings and errors.
These Mavic Mini issues require some troubleshooting to find out what has happened and then to fix the Mavic Mini flight problems.
Some of the most common issues with the Mavic Mini are the “Not Enough Force / ESC warning” and “Max Power Load Reached” error. Other Mavic Mini issues include disconnecting from the remote controller or Fly app, fly away or the Mavic Mini return to home feature not working correctly.
Here we look at these issues and possible fixes. Some of these issues could be caused by many variables and other Mavic Mini problems may require your drone to be returned to be fixed.
If you are having issues straight out of the box or within a few days of buying your Mavic Mini, then it is important that you troubleshoot the issue as quickly as possible. Your Mavic Mini will have a returns policy or money back guarantee, which you can use to get a replacement.
Now, lets look at these Mavic Mini drone issues and fixes.
DJI Mavic Mini Not Enough Force ESC Warning And Max Power Load Reached
Receiving the DJI Mavic Mini Not Enough Force/ESC warning or Max Power Load Reached error can be quite scary.
The Mavic Mini may even drop altitude and can even crash. On many occasions the Mavic Mini will drop and recover it’s position. However, if you are flying very close the the ground, the Mavic Mini may bounce off the ground. This is pretty scary and you will be lucky if your drone is not damaged.
There are many reasons, which can cause this issue and at the time of writing DJI don’t have a definitive answer or solution to receiving the Mavic Mini Max Power Load Reached and Not Enough Force/ESC error.
However, quite a few Mavic Mini owners have solved this issue themselves or recognized what is causing the problem.
Here is our information, tips and troubleshooting in dealing with the Not Enough Force/ESC warning and Max Power Load Reached error.
Not Enough Force/ESC Warning And Max Power Load Reached

The warning is that the Mavic Mini is not getting enough power and the error message is being generated on the Electronic Stability Controllers (ESC).
So, this message points the issue being with the ESC (Electronic Speed Controllers) and motors. You can read further on ESC, IMU, motors and propellers in our article How A Quadcopter Flies.
Now, power issues could also point to a faulty Mavic Mini battery. However, nothing definitive has come back from DJI on the cause.
This “Not Enough Force ESC warning” issue has been fixed by various methods, which we discuss here.
We will start looking at whether the Mavic Mini is being pushed above it’s recommended flying recommendations, which is causing the warnings or to actual real problems with the Mavic Mini quadcopter.
Maximum Wind Resistance Flying – Is the problem occurring because the Mavic Mini is flying in winds stronger than 17.9 mph (28.8 km/h), which is the maximum wind resistance speed for the drone.
17.9 mph (28.8 km/h) is level 4 on the Beaufort scale, meaning a moderate breeze. Many of these not enough force/ESC warnings are happening at a good height. While it may be calm on the ground, at a small height above, there could be a slight wind or more than a moderate breeze, meaning the Mavic Mini will find it difficult to fly against.
Flying at full speed – If you are flying at full speed and if their is a slight headwind, then this may also cause the error. The motors are being pushed to the limit. Ease back on the throttle and see if the warning goes away.
Ascending very quickly in P-Mode – Does the problem occur when you are ascending quickly. If it does, then it is also because the drone encounters a high resistance during flying upwards and the flight controller detects this and the Not Enough Power ESC warning message will pop up.
Max Ceiling Service – Is the Mavic Mini been flown at or close to the max height for flying of 1.86 mile (3 km) above sea level. Basically the air is thinner, the higher you are up. In thin air, the drone motors have to work a lot harder to keep the drone in the air.
Propeller guards causing the issue – Remove the propellers guards if they are attached. A few Mavic Mini pilots have resolved the issue by just taking off the propeller guards. If this is causing the issue, then replace for new Mavic Mini propeller guards.
Faulty propellers – Quite a few of the Mavic Mini drone receiving the “Not Enough Force / ESC warning” and “Max Power Load Reached” have been fixed by simply replacing the props. There are many different Mavic Mini propellers on the market.
Examine the propellers. Even if you don’t see any fault, go ahead and change them. Their might be a slight defect in one of more of the propellers, which isn’t even noticeable to the eye. The issue has been fixed for quite a few owners by changing to a new Mavic Mini propeller set.

Helistar 16Pcs 4726F Propellers Foldable Low Noise Blades Compatible with DJI Mavic Mini Drone, Golden
- 4726F Low noise propellers specially designed compatible with DJI Mavic Mini drone. This is not original propellers.
- Small size, lightweight, portable, low noise quiet flight.
- Light flying durable flexible.
- Easy to mount, secure, durable, and well-balanced propellers.
- Package include: 16pcs propellers (8 CW + 8 CCW), 24pcs screws, 2pcs screwdriver, drone and accessories are not included.
A few Mavic Mini pilots have noticed that a propeller blade is ever so slightly rubbing against the drone. So with the Mavic Mini turned off, spin the propellers and see if this is happening.
Also, DJI recommend that you replace the full set together rather than just 1 prop at a time.

Faulty Battery – If you have purchased spare batteries, swap the battery and see if the Not Enough Force warning or Not Enough Power/ESC warning reoccurs. If you have a faulty battery, you should be able to have it replaced if the Mavic Mini is still under warranty.
Calibrate IMU & Compass – This simple procedure fixes all sorts of issues, especially flying erratically, having flyaways and disconnects. If you have a crash and your Mavic Mini isn’t damaged, you will need to do the Mavic Mini IMU and compass calibration. Here are the instructions with videos on how to calibrate the Mavic Mini.
Flying In S or P Mode – Does the warning happen only in S Mode or P Mode. It is one of the questions that DJI Support always ask and could be an indication on where they believe the problem to be. If it happens in only one of the modes, this might indicate a software issue rather than a hardware issues. Proceed with updating the Mavic Mini firmware or if at the latest firmware, then downgrade the firmware and then update it again.
Update the DJI Fly App – Make sure you have the latest version of the DJI Fly App. Generally with a new firmware, their is also a new version of the Fly app. The latest version is version V 1.0.8 and it will contain new features and fix any bugs in the software.
Update the Mavic Mini firmware – The Mavic Mini, which you purchased may have been on the shelf for a few weeks and doesn’t have the latest firmware. You can update the drone easily using these DJI Mavic Mini firmware update instructions. The latest Mavic Mini firmware v01.100.0500 was released on 2020.04.23. This is the 4th firmware update since the Mavic Mini was released. Each Mavic Mini update contains new features and also fixes bugs and issues.
Downgrade / Upgrade Mavic Mini firmware – The Mavic Mini Not Enough Force/ESC warning has been fixed on quite a few occasions by first downgrading the Mavic Mini firmware and then upgrading it again.
You can downgrade the Mavic Mini firmware using the DJI Assistant 2 app on your computer. If this fixes the issue, then the problem was originally with a corrupted firmware or it didn’t install completing on the Mavic Mini in the first instance.
Mavic Mini RTH Not Working Correctly
There are various reasons for the Mavic Mini Return-To-Home feature not working correctly. Or instead of returning to the home point, the Mavic Mini does an emergency landing. Here are some of the reasons we have found to have caused the Mavic Mini not to return to the home point.
What Is The Mavic Mini Home Point – Answered

The default Home Point is the first location where the Mavic Mini received a strong GNSS signals. In the DJI Fly App the white GNSS icon will have at least 4 white bars. The Mavic Mini status indicator blinks green quickly after the Home Point has been recorded.
Mavic Mini Return To Home Issues
Unsuccessful Home Point Recorded – With firmware versions previous to v01.00.0400, it was possible to takeoff and fly with a weak GPS signal or in bad light. If you have a weak GPS signal at takeoff, then the Home Point will not be recorded correctly.
The Home Point will be recorded when the Mavic Mini picks up a strong GPS signal, which means the Mavic Mini will return to an different Home Point than what you wanted.
With firmware version v01.00.0400, the feature to disable takeoff when the GPS signal is weak (GPS <8) and the environment light is not sufficient was added. This feature can be disabled manually (requires DJI Fly app v1.0.4 or later).
Weak Or Unavailable GPS – While you may have an home point recorded at takeoff, the Mavic Mini will not be able to return to the Home Point if the GPS signal becomes weak or unavailable. It is very important to fly in areas where the GPS signal is strong.
Battery power – The DJI Mavic Mini battery has depleted to a level where it can’t make it back to the home point and instead has to do an emergency landing.
Flying against the wind – can slow any drone down dramatically and drain the battery pretty quickly. The Mavic Mini wind resistant speed is 17.9 mph (28.8 km/h) which really is only a moderate breeze equivalent to level 4 on the Beaufort scale.
Flying into authorization GEO zones – flying in to a no fly or blue zone where you need authorization to fly will initiate an automatic landing. This will happen at 100 seconds into flying in an Authorization zone.
You won’t be able to cancel out of the Automatic landing. We have seen occasions when someone was flying just outside an Authorization zone, then drifted into the zone because of wind. The automatic landing was initiated even through the RTH button was pressed.
Many Mavic Mini owners live inside Authorization zones and were unable to fly their drone in their garden or even inside their house leaving them pretty annoyed.
Now, if your drone is on firmware version v01.00.0300 or earlier, there is no GEO zone unlock feature.
However, the Mavic Mini feature to unlock GEO zones starts at firmware version v01.00.0400 which also requires DJI Fly v1.0.4 or later. This firmware version was released on December 31st, 2019.
Calibrate The Compass And IMU – If your Mavic Mini is not returning to it’s home point, then it could be that it doesn’t know its exact location because of electromagnetic interference or it is having issues with picking up the global satellites correctly.
Fly the Mavic Mini back in and calibrate the Compass. While the IMU is about the positioning of the Mavic Mini keeping it stable in the sky, it is never a bad idea to also calibrate the IMU.
Lost Connection With Remote Controller – The Failsafe RTH function automatically activates after the remote controller signal is lost for more than 11 seconds. However, this depends on whether the Home Point was successfully recorded in the first place.
Leg Extensions – The antenna for the Mavic Mini are in the front legs of the quadcopter. If you have leg extensions on the Mavic Mini for landing in grass, then the leg extensions could be stopping be the cause of losing the Mini losing connection with the Remote Controller.
Mavic Mini Lands Immediately – If the Mavic Mini drone is less than 20 meters (65.61 feet) from the Home Point when the RTH procedure begins, it lands immediately. This is confirmed on page 13 of the Mavic Mini user guide. 20 meters is quite a distance away. It is probably not a good idea for the Mavic Mini takeoff and Home Point to be recorded where their is water close by.
Strong Winds – The Mavic Mini flies back to the Home Point at a speed of 8 meters (26 feet) per second. If it is windy, the drone will not be able to fly at this speed and it may not reach the home point in time and will do an emergency landing.
RTH Altitude – If you are not flying in an open area, then it might be important to set a different altitude than the default 20 meters (65.61) altitude. Flying in areas where there are trees, ditches, tall bushes etc. You can set the a different RTH altitude in the DJI Fly app.
Mavic Mini Return To Home Best Practices
Mavic Mini RTH Knowledge – Know everything about the Mavic Mini Return To Home feature. Read the Mavic Mini User Guide, which covers the RTH feature on Page 12, 13 and 14.
Keep the Mavic Mini clean – use wipes and check the Mavic Mini physically.
Home Point Success – make sure when you take off that the Home Point is successfully recorded.
Calibrate the Compass – especially if you are flying in a new area, which is a good distance from the last place you flew. Also, calibrate if you receive a message in the DJI Fly app to calibrate. Definitely calibrate the compass after a crash even after a small one where there is no physical damage to the drone.
Don’t Fly – if you have bad light or weak GPS signal.
Keeping the Mavic Mini updated – Check and update both the firmware for the Mavic Mini drone and remote controller. Also, install the latest DJI Fly app when it becomes available.
Electromagnetic Interference – A lot of EMI will cause issues with your Mavic Mini compass and flight capabilities including knowing where it is in the sky. Understand and watch out for EMI in the area you will be flying your Mavic Mini.
EMI is the interference caused by one electrical or electronic device to another by their electromagnetic fields. Electromagnetic interference (EMI), also called radio-frequency interference (RFI) when in the radio frequency spectrum, is a disturbance generated by an external source that affects another electrical circuit.
Examples of EMI include power lines, cellphone masts, building with reinforced steel, electric cables, bridges, railway lines, cars and electrical gadgets.
Note: You can find a terrific variety of Mavic Mini parts, upgrades and accessories here.
Here is a great video with explains electromagnetic interference.
DJI Mavic Mini Disconnects, Fly Aways And Flight Issues
There are many reasons for Mavic Mini disconnecting and losing connection with the remote controller or Fly app. It’s the same for fly aways.
These Mavic Mini disconnects and fly aways can be caused by various sources from the quadcopter, remote controller, smartphone, tablet or EMI. So it may take quite a few of the below steps to fix the Mavic Mini flying issues.
Here are some top tips you can try to resolve or prevent Mavic Mini disconnects and fly aways.
Have You Logged Into DJI Fly App
When you install the DJI Fly app on your Smartphone, you will be asked to log in or register. If you are not logged in, then your flight range will be limited in both altitude and range until you activate your login. You will more than likely have disconnected issues without logging in.
If you have skipped this step after installing the DJI Fly app, then you can login by tapping into the profile and then click on “Log In”.
Mavic Mini Cables Causing Disconnected Issue
Check the cable going from your Smartphone or tablet to the RC. The cable could have come loose at either end. Also, try a replacement cable as they can break or become frayed over time. They can even be faulty from the factory.
Damaged Ports Causing Mavic Mini Disconnects
It is possible for the ports on the Mavic Mini remote controller or Smartphone to become damaged over time. So if you are having disconnects using a Smartphone like a Samsung or Apple, then fly with another device, which use a different port and cable.
DJI Fly App Cache Causing Disconnects
Cache files can fill up the memory and even become corrupt. There are 2 setting in the DJI Fly app for cache settings.
- Cache When Recording
- Max Video Cache Capacity
With disconnects, it is a good to turn off the “Cache When Recording” function. You can find this in the Settings > Camera > Advanced Camera Settings. Move the slider to the left and turn it off.
There are 4 caches stored in the DJI Fly App which can be cleared;
- Video Cache
- Photo Cache
- Music Cache
- Aircraft Flight Record Cache
You can clear the cache in the DJI Fly App by clicking on Profile > Settings > Clear Cache
Click on each and then tap “confirm” to clear the cache.
Smartphone Causing Mavic Mini Disconnect Issues
With disconnect issues, it is very easy to view the DJI Mavic Mini drone or the remote controller to be the cause.
However, many of the drone disconnects are caused by the smartphone or tablet, which have the DJI Fly app installed.
Smartphones have a lot of applications installed and they are constantly working, even when we are not using them. They are constantly connected to the Internet, the cellphone provider, pulling in data, notification and pinging the network.
To fly your Mavic Mini without issues, you should ensure your smartphone or tablet is running optimally.
Some best practice regarding smartphones and tablets would be to greatly reduce notifications from the various apps (Facebook, Twitter, Instagram, WhatsApp etc) while flying. Turn off app updates while flying. Remove unused apps, as these use up both space, memory and processor power.
When you are flying your Mavic Mini with your Smartphone in the Remote Controller, you can turn off your phones WiFi. Also switch off Bluetooth or personal hotspots etc.
You can also fly your Mavic Mini in Airplane Mode, which will stop other apps from updating etc.
There are programs for optimizing your Smartphone and tablet. Use these to have your smartphone or tablet running optimally.
If your smartphone is not running optimally, then opening the DJI Fly app and video recording while flying, might place a heavier load on the processor or fill up it’s memory. If the smartphone is running slow, then it could easily drop the connection.
Micro SD Card Causing Mavic Mini Disconnect Problems
There has been a number of issues with the Mavic Mini disconnecting from the remote controller or DJI Fly app caused by the micro SD card.
These micro SD cards can become damaged physically or the file system can become corrupt on the card. Even a video or photograph can become corrupt on the micro SD card.
If the Mavic Mini micro SD card has been used for something else or has other files and folders on it, then when it is back in the Mavic, it can cause an issue when you try to record to it. The micro SD card may still work but it is not perfect and will cause an interference in the Mavic Mini.
Take out the micro SD card and try flying without it and see if you still get disconnects.
If you don’t get a disconnect, then the issue is with the micro SD card. Place the micro SD card in the Mavic Mini while it is on the ground. In the DJI Fly app camera settings, you can format the micro SD card.
Before you format the micro SD card, you might want to copy the existing information (files, photos and videos) on the card over to your computer.
If the Mavic Mini is still causing disconnects after the micro SD format, then replace the card with the DJI recommended micro SD cards which are as follows;
- 16 GB: SanDisk Extreme, Lexar 633x.
- 32 GB: Samsung Pro Endurance, Samsung Evo Plus, SanDisk Industrial, SanDisk Extreme V30 A1, SanDisk Extreme Pro V30 A1, Lexar 633x, Lexar 667x.
- 64 GB: Samsung Pro Endurance, Samsung Evo Plus, SanDisk Extreme V30 A1, Lexar 633x, Lexar 667x, Lexar 1000x, Toshiba EXCERIA M303 V30 A1, Netac Pro V30 A1.
- 128 GB: Samsung Pro Plus, Samsung Evo Plus, SanDisk Extreme V30 A1, SanDisk Extreme Plus V30 A1, Lexar 633x, Lexar 667x, Lexar 1000x, Toshiba EXCERIA M303 V30 A1, Netac Pro V30 A1.
- 256 GB: SanDisk Extreme V30 A1.
Mavic Mini Remote Controller Causing Connection Error
Check your remote controller. Make sure the ports and cables are clean. Bits of dirt or fluff can get into ports very easily.
It is also easy to get carried away with enthusiasm to get the Mavic Mini up the air as quickly as possible. Flying and filming with the Mavic Mini is great fun.
However, it is always good advice to do your pre-flight checks ,which include having the Mavic Mini remote controller antenna pointing correctly.
One of the simplest ways to have the Mavic Mini disconnect from the remote controller is by holding the remote controller and antenna in the wrong direction.
To have the strongest transmission signal, make sure you are holding the Mavic Mini remote controller towards where the Mavic is in the sky. Your Mavic Mini remote control antenna should be pointing correctly as in the below image.
This is very important and especially if you are flying the Mavic Mini further out.
Weak Signal Or EMI Causing Mavic Mini To Disconnect
If you are flying a good distance out, then the transmission signal is going to get weaker. Now, as the signal gets weaker, the chances of the Mavic Mini disconnecting either from the DJI Fly app or the remote controller becomes a real possibility.
The Mavic Mini max transmission distance is 2.48 mile (4 km), unobstructed and in line of sight using the Remote Controller with the DJI Fly app connected. The transmission uses enhanced WiFi.
However, it is never a great idea to push the flight range or altitude to its limit.
Also flying in fog, rain, very dull weather or bad light will cause disconnects and flights issues.
How To Strengthen The Transmitter Signal Your Mavic Mini
If you are receiving a weak signal and disconnects at moderate to long distance out, then it could have something to do with the surroundings (trees, buildings etc) or with electromagnetic radiation (power lines, cellphone transmitters etc).
It could also be an issue with your Mavic Mini drone or the remote controller. If you have tried everything in this article and the problem still exists but you don’t necessarily want to send your Mavic Mini back as the Mavic disconnects are only on long distance, then the best option to strengthen the transmission signal is to add a Parabolic Antenna Range Booster to the Mavic Mini remote controller.
Calibrate the Mavic Compass / IMU To Fix Disconnected Or Flying Erratically Issues
Calibrating the Mavic Mini Compass and IMU will help fix disconnects and erratic flying. If the compass and IMU are not functioning correctly, then your quadcopter will fly erratically and send incorrect information to the flight controller and remote controller. It is important that all aspects of your Mavic Mini is functioning correctly, which will reduce the chances of disconnects.
The Mavic Mini calibration is very easy. You can find a tremendous instructional video on how to calibrate the Mavic Mini compass and IMU here.
Here are 2 excellent article to further your knowledge on how drones work and fly.
Drone Gyro Stabilization, IMU And Flight Controllers Explained
How A Quadcopter Works With Propellers And Motors Explained
Firmware Update Fixes Mavic Mini Disconnect Issues
DJI release firmware updates for the Mavic Mini and their other quadcopters, gimbals and cameras on a regular basis. If you are having disconnects, then it is always recommended to update the Mavic Mini firmware.
If you read down through the Mavic Mini firmware update release notes, you can see where certain updates fix issues, which could have been causing the Mavic Mini disconnects.
Some pilots never update the firmware on their quadcopter. However it is essential to update the firmware as it contains fixes for most issues. Firmware updates will also add new features to the quadcopter.
DJI Mini Care Refresh
It is always a good idea to invest in the DJI Mavic Mini Care Refresh program. It provides two replacement units for a small additional charge in one year and covers a wide variety of accidents.
Here are some of the bugs and issues fixed by the DJI Mavic Mini firmware updates, which could fix disconnect, fly away and RTH issues.
Firmware Release v01.100.0400
- Added feature to unlock GEO zones (requires DJI Fly app v1.0.4 or later).
- Added feature to disable takeoff when the GPS signal is weak (GPS <8) and the environment light is not sufficient. Feature can be disabled manually in DJI Fly v1.0.4 or later.
- Fixed issue: linking was abnormal in some regions.
- Added requirement for compass calibration before takeoff when the environment light is not sufficient and the compass experiences interference.
- Adjusted flight altitude and distance in payload mode.
Firmware Release v01.100.0300
- Increased flight stability in some scenarios.
- Optimized performance when taking off in areas of high elevation.
- Optimized aircraft orientation control.
Firmware Release v01.100.0200
- Increased the speed of GPS signal searching.
- Optimized the aircraft’s performance in high altitude environments.
Mavic Mini Disconnects After Firmware Update
Now, if you have completed a firmware update and your Mavic Mini starts disconnecting, then try all the above. However, more than likely the issue was caused by the new firmware not installing correctly or a bug in the new firmware.
Using the DJI Assistant 2 application installed on a computer, you connect your Mavic Mini drone. Then, you can roll back to an earlier Mavic Mini firmware version.
After downgrading the Mavic Mini firmware, you should then fly your Mavic Mini to see if the flight issues are resolved. If they are, you can try the upgrade again or wait a few days to see if DJI release another firmware update.
Here is a terrific article, which shows you around the DJI Mavic Assistant 2 software. While the article was originally written for the Mavic Pro, it shows you how the DJI Assistant 2 application can be used to troubleshoot flight issues, upgrade, downgrade firmware and much more.
The Mavic Mini and all DJI drones contain a flight recorder. Flight data information including telemetry, aircraft status and other parameters are automatically saved to the internal date recorder on your DJI drone.
This data can be accessed using the DJI Assistant 2 software. This information can also be sent to DJI to troubleshoot flight issues.
What To Do When Mavic Mini Disconnects During Flight
DJI Fly App Video Disconnects When Flying
If the remote controller is still connected and it is just the DJI Fly app which has lost signal, then do the following;
Check Cables – from your RC to the smartphone or tablet. It may be loose or have fallen out.
Close and re-open DJI Fly app – Take your hands off the sticks and let the Mavic Mini hover. Close out of the DJI Fly app and then go back into it. There is a good chance that the Fly app will reconnect again.
DJI Fly App Disconnects When Flying
If you are flying using the DJI Fly app only and not using the RC, then if the Fly app disconnects you won’t be able to fly the Mavic Mini. By default the Mavic Mini will initialize the failsafe Return-To-Home after 11 seconds.
Again, if the Mavic Mini is a good distance out, you may be able to take some action to reconnect while it is in RTH mode. You could try the following;
- Try moving closer in the direction the Mavic Mini is.
- Close out of the DJI Fly app and go back in.
- Stop and start the WiFi on your Smartphone.
- Restart your phone or tablet.
Mavic Mini Remote Controller Disconnects When Flying
This is quite series. As you don’t have any stick control or video then you can’t fly the Mavic Mini even if you can see it. Now the Mavic Mini should initiate the Failsafe Return-To-Home point mode, which it had set just after take off.
If the Mavic Mini has flown a good distance away, then you may be able to help the Remote Controller to reconnect to the Mavic Mini. Here are some tips.
Move Towards The Mavic – Walk towards your Mavic Mini quadcopter which shortens the transmission distance between RC and drone. If you are close to a running motor, generator or power lines etc, this might have weakened the signal to cause the disconnect. So move away from any interference in the direction of the Mavic Mini and it just might reconnect.
Check Remote Controller Antenna Direction – Are the antenna facing in the correct direction. If the Mavic is pretty high in the air you will need to change the angle you are holding the remote controller so that the antenna are pointing directly towards the Mavic. You also need to change the angle you are holding the remote controller if you are standing on a cliff and flying the Mavic lower than the area you are standing in.
Switch Off and Back On The Remote – It’s worth trying as it only takes a few seconds.
Return To Home Failsafe Mode – If you are flying in a wide open space with no obstacles in the way, then let the RTH failsafe mode bring the Mavic quadcopter back to it’s home point. It’s a great feature. Then do your checks and troubleshooting using the tips in this article as a guide.
DJI Mavic Mini Forum
If you are still having difficulties with your Mavic Mini, you can also read the DJI Mavic Mini Forum and post questions.
Mavic Mini Videos For Better Flying And Troubleshooting
This first videos explains how the Mavic Mini communicates with the quadcopter remote controller and your smartphone or tablet. It also explains that you don’t need have your smartphone WiFi turned on when you are flying the Mavic Mini with your smartphone connected to the RC.
This next video gives you some terrific Mavic Mini tips and tricks.
Страница 1 из 2
-
Всем доброго времени суток! Уважаемые товарищи, помогите пожалуйста разобраться!
Dji Phantom 3 SE недавно начал «исполнять». При тангаже ВВЕРХ поворачивается по YAW то на 90 градусов и обратно выравнивается, то просто вращается вокруг своей оси. Это «унитазинг»?? Видео прикреплю. Что это может быть и с чем связано? в какую сторону копать?
Логи позже, когда соберу его после падения. Исполнять начал, возможно после падения, а может это не связано. Падал уже 4 раза за 2 недели, но это отдельный вопрос, когда достану логи.https://youtu.be/JhSm1Ds0j_0
— Сообщения объединены, 12 июн 2018 —
Причем, поведение одинаковое на обоих АКБ и на всех пропеллерах. Закручивание только против часовой стрелки (влево).
Вот еще что заметил: первый подъем более или менее нормально (подвес отыгрывает), второй — с поворотом на 90 градусов, а третий подъем — кручение непрерывное. После замены аккума — все по новой. -

5yoda5
Master
Команда форума- Регистрация:
- 29 янв 2015
- Сообщения:
- 7.137
- Город:
- Реж
- Имя:
- Тимур
Прикольно, вот и фантомоводы подтянулись
Фантом, так Фантом (но вообще-то на dji-club.ru больше спецов по Фантикам). Скажите, уважаемый — а какой полетный режим был включен — атти или P-mode? VPS была включена или нет? Проводилась ли калибровка компаса, и что пишется в состоянии датчиков в DJI GO?На видео — НЕ унитазинг. Кстати, на своем P3A я наблюдал классический унитаз — это выглядит как круги около некоего центра (сам коптер по яв не крутит, просто он круги сам собой нарезает, хотя должен держать позицию).
Возможно они будут лишними. Я снимал логи со своего Фантика, хотел понять причины краша, но онлайн интерпретатор (эйрдата что ли) выплюнул мне их назад с презрением — не понравился формат логов что ли. Короче — не получилось ничего проанализировать.
А может, как раз и связано.
Проверьте:
1. свободно ли вращаются все движки — на выключенном коптере их нужно покрутить руками, послушать внимательно (нет ли хрустов/шелчков/шкрябаний), посмотреть как свободно они крутятся (с надетыми пропеллерами сколько примерно оборотов делают по инерции).
2. Все ли моторы плотно сидят на своих местах — покачать немного за валы — вдруг есть трещина в пластике, которая не видна, но мотор перекашивается при взлете (трещина в корпусе в месте посадки одного из моторов)
3. Все ли моторы соосны. Может один из моторов наклонило на луче (опять же повреждения корпуса). Надеть пропеллеры, замерять расстояния от кончиков пропов до стола и сравнить на разных лучах.
4. Все ли пропеллеры одинаковы по длине. Возможно обломило один из кончиков одного пропеллера. Проверьте линейкой длину всех пропов.Это не унитазинг, потом посты переместим куда-нибудь, пока тут обсуждаем.
-
Спасибо, что приняли и благодарю за быстрый и развернутый ответ!
Сильно не ругайтесь, если что то не так опишу или назову, я новенький в этом деле.P-GPS. Всегда. На Atti не летаю.
Что такое VPS? Если это система позиционирования по ЧБ камере и датчикам, то включена, я ее не отключал никогда. Калибровка компаса всегда в новом месте, если дальше 50 км, от последнего места взлета.
В состоянии датчиков в приложении все нормально.Соглашусь, что любое падение не проходит бесследно.
Приобрел я этот дрон год назад. Первое падение было в августе прошлого года в мягкую траву. (Ошибка пилотирования) Сломались 2 лопасти и отлетел подвес с камерой. На всех проводах поотрывало разъемы. Я все обратно собрал, и летал нормально, без глюков, без приключений и падений до конца мая этого года. А в начале июня при посадке, его начало крутить и он рухнул. Опять подвес отлетел, подвес на место и в путь, два полета и опять штопор, падение, подвес отдельно. И так уже 3 или 4 раза. После какого падения он начал при наборе высоты крутится — сказать трудно. Но железо все в порядке, дело в электронике, я думаю.1. Все отлично работает, крутится ровно, одинаковое количество оборотов в холостую. греются одинаково.
2. Моторы на местах, прикручены, подшипники живы, осевой люфт минимален и на всех моторах одинаков. Лучи жесткие без трещин.
3. У Фантиков оси моторов изначально не соосны. У боковых моторов оси направлены чуть к друг другу и наружу.
4. Пропов 3 комплекта перепробовал — ни каких изменений — и Алиэкспрессовские с металлическими гайками и оригинальные новые.
Причем с одним обломанным концом была у меня лопасть — нормально летал пол года, немного потряхивало, но летал без глюков, потом купил новый комплект.Вложения:
-
-
5yoda5
Master
Команда форума- Регистрация:
- 29 янв 2015
- Сообщения:
- 7.137
- Город:
- Реж
- Имя:
- Тимур
Нифига себе!
Да, речь про неё.
Visual Positioning System — система визуального позиционирования.То есть ни на компас, ни на IMU не ругается, правильно?
То есть это произошло первый раз прямо в полете, при посадке уже?
Не было ругачек ни «motor obstruct», ни «esc status error»?Но я так понимаю, при одинаковом положении пропеллеров расстояния на всех лучах одинаковы? (то есть проверить нужно 4 точки но на каждом луче).
Если это точно, прямо «зуб даю» — тогда есть ещё вариант, что в пульте что-то случилось со стиком.
Насколько я знаю, есть две возможных комбинации для арма/дизарма — либо свести стики к центру и вниз, либо наоборот развести стики (и эти комбинации равнозначные). У вас обе эти комбинации нормально отрабатывают?
Потом, вроде ещё в джи гоу есть проверка пульта (не помню точно, давно не лазил там), там циферки меняются линейно при движении руддера влево/вправо, без рывков?……
Что касается «дело в электронике» — тогда есть вариант откалибровать ИМУ. Для этого рекомендуют выставить коптер по уровню и запустить процедуру из проги. Процесс калибровки будет идти минут 5, пока прога не отпишется — коптер лучше не трогать и рядом не прыгать.Последнее редактирование: 13 июн 2018
-
Не вытерпел, разобрал дрон. Шлейф VPS поврежден, видимо при падении. УРА !!! подумал я и восстановил шлейф. Собрал. Решил попробовать без VPS, снял весь блок целиком и отсоединил шлейф.
Взлетаем!
И о, ужас, поведение не изменилось. Первый набор высоты, нормально, второй с поворотом на 90 градусов, третий и последующие с вращением влево — всё как и было, без изменений.
Причем режим использования VPS в настройках включен, блока нет, а дрон да же не ругается. Отключил в настройках — поведение не изменилось.
Откалибровал IMU — без изменений.
Для исключения пульта проверил сведение/разведение двух стиков — всё корректно работает. Поменял управление: вращение по рудеру задал на правый стик — не помогло.Про падения. Поведение дрона при падениях координально отличается от поворотов при наборе высоты. Но падения это совершенно другой вопрос. Я бы хотел сначала разобраться с полетом.
Повспоминал про падения, ДА, ругается что то про моторы и ошибка ESC выпадала.— Сообщения объединены, 15 июн 2018 —
при прошлом падении:
Not Enough Force/ESC Errorо чем это говорит??
https://app.airdata.com/main?flight=8047fa2bddbadc00ada129339903443f&page_id=GENERALNotifications
— Сообщения объединены, 15 июн 2018 —
А так механически задается несоосность осей моторов.
Вложения:
-
5yoda5
Master
Команда форума- Регистрация:
- 29 янв 2015
- Сообщения:
- 7.137
- Город:
- Реж
- Имя:
- Тимур
То, что исправили это — огромный плюс, уже не зря был коптер разобран!
А в джи гоу разве не было ругачек на неисправность VPS? Я не смотрел по распиновке, может был перебит земляной провод, и возможно земля пришла по другому разъему — не знаю (есть ещё вариант, что этот провод просто не используется). Работающий VPS поможет удерживать коптер на месте, когда он висит невысоко над землей.
Но VPS немного не то, что вам нужно.
У вас тут раскрутка, вызванная разнотягом моторов.
А вот— уже теплее…. Если перевести на русский — не хватает силы, ошибка регулей.
Вообще, я когда купил свой Фантик — у него была ошибка просто ESC Error, и коптер отказывался армиться. В моем случае это оказались порванные обмотки на двух моторах (и третий был как-то не внушающий) — предыдущий хозяин порвал их сам, вкрутив длинные винты после того, как убрал «защиту лопастей» (которая нифига не защищает ни лопасти, ни человека от них). Но такая ошибка ещё бывает, когда сгорит «регуль» на центральной плате. Это было бы сложнее гораздо. Потому что там стоят не отдельные ФЕТы, а сразу микросхемы-драйверы, которые найти тяжелее.
Что случилось у вас…. Это виноват один из моторов. Сейчас, пересмотрю видео
…………..
Раз закручивает его против часовой стрелки, то либо передний левый, либо задний правый мотор (или соотвествующий регулятор на центральной плате).
Если глянуть на перебитый шлейф VPSа (коптер падал/ударялся правым боком?) — то я бы заострил внимание на заднем правом моторе.Посмотрите внимательно, целы ли обмотки, крутится ли он так же как остальные, и осмотрите внимательно центральную плату в той её части, которая смотрит в сторону этого мотора.
Да вроде нормально всё выглядит. Если бы был пластик смят — тогда может быть и был бы мотор наклонен. А на заднем правом луче тоже всё нормально?
-
А так выглядят антенны в пульте. Интересно, это их нормальное состояние или они перегревались?
Вложения:
-
-
Визуально двигатели в порядке, обмотки целы и не обуглены (те их части, которые видно), крутятся одинаково, останавливаются все разом, раскручиваются то же. Может отпаять и промерить сопротивление обмоток?
По регуляторам — интересно как они выглядят.
При осмотре платы, для переднего левого мотора обнаружил каплю припоя на ножке микросхемы. Может она нагрелась, и припой поплыл? А теперь неконтакт.
Паять такое наверное лучше феном? Но его у меня нет))ссылка на фото:
https://cloud.mail.ru/public/EJKJ/9KdnasYoFВложения:
Последнее редактирование: 17 июн 2018
-
-
Пропаял. Не помогло.
Как выглядят регуляторы?— Сообщения объединены, 17 июн 2018 —
https://app.airdata.com/main?flight=dbc0bf90fc7e49297b7b8b87e6b3a6fd
Вложения:
-
-
5yoda5
Master
Команда форума- Регистрация:
- 29 янв 2015
- Сообщения:
- 7.137
- Город:
- Реж
- Имя:
- Тимур
А это разве не приемные антенны от видеосистемы? Если приемные — то что бы им греться? Да и вообще, антенны обычно не греются, греется ВЧ тракт, но не сама антенна.
(бывает, греются большие мачты-антенны, в которые вкачивают киловатты и если есть туман или осадки, но это совсем не то).Да, вы правильно смотрите. То, что вы паяли — это один из силовых ключей (ФЕТов). Кстати классно, что они у вас отдельные, в случае чего их можно проверить, и им можно найти замену. У меня всё выглядит немного не так.
Смотрим на то место платы, куда припаян мотор. Рядом ряд силовых ключей (ФЕТы). Где-то неподалеку ещё должен быть управляющий микроконтроллер. Вот ФЕТы с микроконтроллером и небольшой обвязкой — это и есть отдельно взятый регулятор.Нет, давайте проведем другой эскперимент (я такой выдумщик
). Предлагаю поменять местами два соседних движка (именно соседние, а не диагональные). Перепаять, соблюдая цветовую маркировку, и дополнительно перед взлетом проверить, что моторы крутятся каждый в правильную сторону (лучше проверять без пропеллеров).
Надеть пропы, взлететь и если после взлета начнет крутить в другую сторону — значит однозначно виноват мотор. Если ничего не поменяется — значит моторы не при чем. -
Я, тем временем, провел другой эксперимент:
В ходе эксперимента установлено, что пропеллеры с черными метками (вращаются по часовой стрелке) поворачивают дрон влево (против часовой стрелки).
— Сообщения объединены, 20 июн 2018 —
для этого нужно будет снять роторы моторов (те что с резьбой под пропеллеры) и поменять местами?
иначе, не удастся правильно установить пропеллеры. или я не прав? -
5yoda5
Master
Команда форума- Регистрация:
- 29 янв 2015
- Сообщения:
- 7.137
- Город:
- Реж
- Имя:
- Тимур
, иииии? Я ошибся в своих предположениях относительно виновника вращения вашего коптера?
Я думаю пока, что два «белых» мотора дуют воздухом сильнее, чем два «черных» мотора. Оттого и раскрутка. А вот почему это происходит — пока не знаю.Блин, я и забыл про резьбу. Дайте подумать….
Моторы разбирать я вас не заставляю.
Пока ничего в голову не лезет, кроме тестовой замены на заведомо исправный мотор. Но это может не дать положительного результата.Вы пытались анализировать логи? (неблагодарное это занятие вообще, а на DJI и подавно).
Последнее редактирование: 20 июн 2018
-
Я, наоборот, думаю что белые моторы дуют слабее (Not Enough Force), чем черные. От того и раскрутка.пытался. Оказывается «Not Enough Force/ESC Error» выскакивала очень давно, но тогда в полетах ни каких проблем не было (и в DJI Go ни каких сообщений не было). все проблемы начались после падения, влетев в провода.
-
5yoda5
Master
Команда форума- Регистрация:
- 29 янв 2015
- Сообщения:
- 7.137
- Город:
- Реж
- Имя:
- Тимур
Ага, дошло. Да, наверное вы правы (я не претендую на роль всезнайки, я признаю свои ошибки). Тогда непонятно, на какой мотор грешить сейчас. На передний правый?
Давайте подумаем ещё раз.
Имеем раскрутку против часовой стрелки. Имеем ошибку типа «не хватает силы, ошибка регуля». Имеем, что если поставить только черные пропы, то крутит в эту же сторону (то есть тяги от белых нету). То есть потенциально виноват либо передний правый, либо задний левый мотор. Если прибавить к этому перебитый шлейф с правого бока коптера, то подозрения собираются вокруг правого переднего мотора. Всё логично?
Внешний осмотр не дал никаких результатов, внешне пайка нормальная и посторонних оловянных соплей нет, правильно?
Следующим шагом видится мне два пути (две версии):
1. Виноват мотор. Самый простой способ выяснить — заменить на новый, точно работающий. (это не значит — бегите бегом покупать, можно где-то взять напрокат, например у меня ). Можно попробовать прозвонить обмотки отпаяв мотор от регуля, но там разница будет очень маленькой, её очень сложно уловить (представьте кабель из трех изолированных проводов, соединенных вместе на концах — это одна из обмоток движка. в середине рвем один из параллельных проводов и сравниваем сопротивление с предыдущим. разница будет, но ооооочень маленькая). Но это очень возможный вариант, при обрыве одного из проводов в обмотке (при этом сама обмотка электрически целая, она лишилась лишь одного параллельного проводка) — как раз можем получить снижение тяги на моторе.
2. Виноват регуль. Например, сгорел один из ключей. Там на каждую фазу вроде бы по два силовых ключа в параллель. Имеем — регуль вроде работает, но ампераж полный выдать не может. Чисто теоретически, в этом случае наверное будет не потеря мощности, а уменьшение «запаса прочности». То есть при сильной нагрузке сгорит и второй ключ на этой же фазе. -
Последнее редактирование: 21 июн 2018
-
5yoda5
Master
Команда форума- Регистрация:
- 29 янв 2015
- Сообщения:
- 7.137
- Город:
- Реж
- Имя:
- Тимур
А это кстати, сильный аргумент. Иногда субъективные ощущения оказываются вернее всяких логических выводов (поэтому роботы ещё не скоро смогут заменить людей).
Да нет, если бы от нагрузки начал плавиться бессвинцовый припой (а его и паяльником тяжеловато выпаять кстати, по сравнению с обычным ПОС) — тогда изоляция на проводах уже давно бы слезла.
А учитывая целостность залитых проводов (белая резиноподобная хрень, которой зафиксировали провода) — движок так был припаян с завода.О, вижу МК Силабс, который рулит силовыми ключами
и слева от него пятачки для программирования. Чисто академический интерес — что туда залито, в МК…
-
-
как я и ожидал, перемена мест двух задних моторов ни чего не дала. дрон вращается влево при наборе высоты. задние исправны. при этом не исключена возможная неисправность переднего правого мотора, но это маловероятно.
я склоняюсь к неисправности регуля, но вот который ? есть возможность приобрести phantom 3 standart на запчасти, но что конкретно менять? -
5yoda5
Master
Команда форума- Регистрация:
- 29 янв 2015
- Сообщения:
- 7.137
- Город:
- Реж
- Имя:
- Тимур
У них может быть разная центральная плата. Перед покупкой обязательно сравнить платы. Особенное внимание — микроконтроллер регуля (SIL) и ключи.
Бывает стоят не раздельные ключи как у вас — а микросхемы-драйверы.
И да, совсем забыл! Бывает старая версия центральной платы, бывает новая версия центральной платы, это видно сразу — по моторам:
Не совместимо друг с другом.По фото. Мне кажется, или обмотка перебита? Вот тут:
То есть вы пересадили колоколы (да, резьба блин), перепаяли моторы на другие места, при этом направление не поменялось?
Не знаю, я по-прежнему склоняюсь к неисправности мотора всё же. Передние моторы сложно так же поменять?
Просто по регулям…. Если бы сгорел один из ФЕТов — это не дало бы снижения мощности, это дало бы уменьшение запаса прочности. Допустим, регуль рассчитан на 25 ампер (точнее можно сказать, подняв даташит на ключи), и после сгорания одного ключа в фазе он становится рассчитан на скажем 15 ампер. То есть при полете на полном газу (что сделать можно только в спорт режиме, или в условиях резкого порыва ветра) может совсем сгореть регуль.
Есть ещё вариант глюка микроконтроллера регуля.
По аналогии с самосборами — я бы откалибровал регуляторы по газу. На Ардукоптере это можно сделать, штатная процедура по настройке. А как это сделать на Фантике — большой вопрос. Как вариант — подпаиваться к пятакам на плате (подключаться к МК Силабс), и настраивать как-то. Но какая там прошивка залита — вообще непонятно. Почему-то мне думается что вовсе не БЛХели, а что-нибудь своё, джидаевское.Если будет «жертвенный» Стандарт — тогда голову себе не кружим, тогда просто пересаживаем центральную плату с запаянным полетным контроллером, перетыкаем все разъемы — и вуаля, у нас опять рабочая машинка. Но в случае неисправного мотора глюки сохранятся
-
донорский стандарт с новыми движками, про это я знаю))
обмотки целы
следующий шаг перемена мест передних моторов, но я на 99% уверен, что это ни чего нового не даст))))просто пересадить плату со стандарта вряд ли получится, там же что то по другому….
ну хотя бы ВЧ тракт есть, а у меня он похоже в подвесе…
у них да же корпуса разные, если не ошибаюсь.
у стандарта нет разъема на плате под VPS
у них антенны разные. вот у меня 2 антенны, обе выходят из подвеса (OFDM модуль) и уходят в ноги.
у них подвесы разные и камеры.
и вообще было бы интересно разобраться что где за что отвечает…
— Сообщения объединены, 22 июн 2018 —
вот объясните мне, пожалуйста, как происходит управление и передача картинки.
я себе это так представляю:
с центральной антенны пульта на 5,8 Ггц СИГНАЛ управления принимается одной из антенн в ноге коптера, попадает в подвес и КОМАНДА управления по шлейфу передается из подвеса в центральную плату.
картинка с камеры усиливается и отправляется во вторую антенну на 2,4 Ггц в другой ноге.
одна из двух одинаковых внутренних антенн в пульте принимает изображение и через вторую антенну на 2,4 Ггц передает в телефон.
в старой версии прошивки можно было выбрать частоту 2,4 или 5,8, так вот что это за частота (сейчас только 2,4) ?? картинка или управление ??и еще дурацкий вопрос. где находится гироскоп и как подвес камеры стабилизирует саму камеру.
а я пока полез подвес разбирать))



 А в джи гоу разве не было ругачек на неисправность VPS? Я не смотрел по распиновке, может был перебит земляной провод, и возможно земля пришла по другому разъему — не знаю (есть ещё вариант, что этот провод просто не используется). Работающий VPS поможет удерживать коптер на месте, когда он висит невысоко над землей.
А в джи гоу разве не было ругачек на неисправность VPS? Я не смотрел по распиновке, может был перебит земляной провод, и возможно земля пришла по другому разъему — не знаю (есть ещё вариант, что этот провод просто не используется). Работающий VPS поможет удерживать коптер на месте, когда он висит невысоко над землей.


![[IMG]](https://forum.apmcopter.ru/threads/dji-phantom-3-se-krutit-po-yaw.1044/proxy.php?image=http%3A%2F%2Fs1.radikale.ru%2Fuploads%2F2018%2F6%2F21%2F52995244569a027704a6632b7d72552c-full.jpg&hash=5ff621824135ec45ff625896195b092e)
![[IMG]](https://forum.apmcopter.ru/threads/dji-phantom-3-se-krutit-po-yaw.1044/proxy.php?image=http%3A%2F%2Fwww.rcteam.ru%2Fimages%2Fnews%2Fcompatibility-new-phantom-3-professional-advanced-motors03.jpg&hash=ceaf77745934149f20ea181b593a39a7)

![[IMG]](https://forum.apmcopter.ru/threads/dji-phantom-3-se-krutit-po-yaw.1044/proxy.php?image=http%3A%2F%2Fs1.radikale.ru%2Fuploads%2F2018%2F6%2F22%2F824e0688590ede68f12d59549dfd97fd-full.jpg&hash=49a32e0a14efa0eec94341d98197e20a)
![[IMG]](https://forum.apmcopter.ru/threads/dji-phantom-3-se-krutit-po-yaw.1044/proxy.php?image=http%3A%2F%2Fs1.radikale.ru%2Fuploads%2F2018%2F6%2F22%2F65f30eec393694b69902cda6edafd812-full.jpg&hash=6ba86737506c93f939714fd229f9713b)
![[IMG]](https://forum.apmcopter.ru/threads/dji-phantom-3-se-krutit-po-yaw.1044/proxy.php?image=http%3A%2F%2Fs1.radikale.ru%2Fuploads%2F2018%2F6%2F22%2Ff84acacd4b679f2c698625c234bebf46-full.jpg&hash=a99f0018fa81c7ffef41fc73f3e4dde2)
Страница 1 из 2
Create an account to follow your favorite communities and start taking part in conversations.
r/djimavicmini
Posted byu/[deleted]3 years ago
![]()
![]()
level 1
I think sport mode would have handled it better. Max power reached just means it’s fighting full force into the wind and that’s the best it can do. More reason to be full sticks into it in sport mode.
The altitude climb at the end was unnecessary and risky too.
I’m not sure I’d ever have the plums to fly off a coast with the wind. I’d only fly out to sea if the wind is coming at me from the sea.
level 2
For sure, sport mode.
Also check for new firmware
level 1
What’s up with the shitty circus music?
level 2
My mini was being a fucking clown
level 1
I’ve reviewed the flight data and discussed with DJI who have recommended I send it back for analysis. Normally Sport mode would help with wind but if I could show the control moves at the time I was pushing up and it was going down…. that aint wind
level 1
I almost had a flyaway the other day, while I was still doing the initial climb from take off my drone launched sideways like someone had hit it with a bat, the flight log shows that it hit 16.3m/s which is much higher than its supposed to be able to go, sticks were not responding at all, I panicked and hit the return to home button and it turned around immediately and headed back to me. Never thought I would see it again but the RTH function saved me
level 2
weird hey did you have any error messages? easy to panic when it starts doing its own thing
level 1
One of my theories was salt spray but then it seems to happen to others in different environments but yeah I think DJI were quick to say send it in so must be a glitch in a small percentage of minis.
Its reassuring to see they replaced a lost at sea drone based on the flight data only
level 1
Watch as I try to bring my sick mini home as it uncontrollably sinks
About Community

Subreddit to discuss the DJI’s mini line of drones including the Mavic Mini, Mini 2, Mini SE, and Mini 3 Pro
DJI Mavic Mini
было бы интересно по увеличению мощности
Паяльник это здорово.Хорошо бы узнать суть процесса??А то собрался избавиться от своего Миника CE😈
Я так понял Вы летали на Минике с защитой?Судя по видео.
Меня мучают смутные сомнения, камера у всех так смещена, или сразу в магазин сдавать?

камера у всех так смещена
Камера вправо, значит у вас официальный дрон. У “серых” смещена влево.
В сети полно картинок, псмотрите на других и сравните со своим
В сети полно картинок
Какой замечательный и подробный ответ! Только про сеть непонятно.
или сразу в магазин сдавать
если вас волнует только расположение камеры то у всех так и лучше сдать в магазин пока еще не летали а то вдруг не понравиться
Какие добрые и отзывчивые люди
Какие добрые и отзывчивые люди
ну просто есть люди которые сначала купили а потом начали жалеть что купили и не прочитали характеристики , я просто предполагал что вы перед покупкой посмотрели фото того что хотели взять и тд ,ну и dji вся продукция официальная особенно по началу выпуска и бывают только акки не оригинал ну и мелкие запчасти
я просто предполагал
почему сразу не ответить коротко, вопрос вполне корректен. На других своих дронах я такого не наблюдал.
почему сразу не ответить коротко, вопрос вполне корректен. На других своих дронах я такого не наблюдал.
Прошу пардону за ответ. У вас с камерой все в порядке, у всех так. Так же на сторону (только влево) была смещена камера у Спарка.
Под “сетью” имел в виду интернет, в которм масса фотографий Мавика Мини, в том числе таких, на которых хорошо видна камера.
почему сразу не ответить коротко, вопрос вполне корректен. На других своих дронах я такого не наблюдал.
Но ведь загуглить ЗАГУГЛИТЬ быстрее чем на форуме спрашивать. Или зайти на офф сайт www.dji.com/mt/mavic-mini
Какие то странные обиды!!Никто и ничем Вам здесь не обязан!!!
Камера вправо, значит у вас официальный дрон. У “серых” смещена влево.
Ты не прав, камера вправо это FCC, а влево — CE )))
Прошу пардону за ответ.
Просто у человека нет чувства юмора )))
Кто нибудь встречался в логах с сообщениями такого рода “Not Enough Force/ESC Error (repeated 48 times)”?
Перед первым полетом откалибровал компас вдали от железа. Квадрика отлетел на 50 метров, сообщил о достигнутом лимите полета. Направил его по дуге на данном расстоянии, Мини выдал сообщение про сильный ветер. Я нажал кнопку возврата домой. Выдалась ошибка по компасу, Мини приземлился на том месте, над котором он был в тот момент. В логах множественные ошибки:
Англоязычные форумы по минику говорят об ошибке в прошивке.
Мини приземлился на том месте, над котором он был в тот момент.
скорее всего поймал обледенение пропов, вот и сел там же. Вот такое заставило миник плюхнуться с такой же ошибкой в сугроб и выжатый на всю катушку стик газа лишь немного замедлил “падение”.
Кто нибудь встречался в логах с сообщениями такого рода “Not Enough Force/ESC Error (repeated 48 times)”?
Я. Писал тут.😃
Я нажал кнопку возврата домой
Вы же вроде читаете англоязычные форумы? RTH при сильном ветре — одна из главных причин потери дрона.
“Not Enough Force/ESC Error” — ошибка комплексная.
Not Enough Force — достигнут максимальный ток, а двигателям для поддержания траектории движения (висения) надо еще. А контроллер питания думает что больше отдать не сможет.
ESC Error — ошибка регуляторов. Достигнута максимальная скорость вращения мотора/моторов, но для поддержания траектории движения (висения) надо крутить быстрее. А уже некуда.
На старших дронах сообщения разведены и можно понять где слабое место, Мини выдает скопом. Но в любом случае такая повторяющаяся ошибка говорит о том, что дрон на пределе.
и переворачивающем выключил
Не понимаю смысла этого насилия. Над ладонью в полуметре зависнуть и в штатном режиме на ладонь сесть? Или за вами погнался кто то?)
скорее всего поймал обледенение пропов
Дело было в Краснодаре, здесь на улице плюс 5-10 градусов.
Я. Писал тут.
Спасибо, если подскажете как выбрать какие именно пропеллеры менять, было бы вообще классно.
RTH при сильном ветре — одна из главных причин потери дрона.
Не думаю что на небольшой высоте был вообще какой-либо сильный ветер. Скорее все таки ошибка в прошивке. Ну или в балансе (?) пропеллеров как пишет человек выше.
Не понимаю смысла этого насилия.
В некоторых случаях это насилие — единственный способ посадки (к примеру, когда сажаете в лодку). Не призываю злоупотреблять им, но как минимум иметь в виду полезно.
Скорее все таки ошибка в прошивке.
Тогда рекомендация с тех же забугорных форумов — прошейтесь (сделайте рефреш) крайней прошивки через ассистент последовательно со всеми аккумуляторами. Рекомендуют еще и пульт перешить, но его влияние здесь не просматривается. А вот несвежая прошивка аккумулятора (там контроллер питания) к такому приводить может.
здесь на улице плюс 5-10 градусов
Пропеллеры при минусе не обмерзают, тогда они сухие. А вот при небольшом плюсе и влажности — легко.
Тогда рекомендация с тех же забугорных форумов — прошейтесь (сделайте рефреш)
Рекомендуют сделать даунгрейд на прошивку .0300. Так и сделаю, потом отпишусь.

Let us diagnose. Let us repair. Let Us Drone. Flying your Phantom 4 Pro or Spark is a blast…until you start ignoring the error or warning messages, then the platonic fun turns into a rush of adrenaline fueled by rebellion because you’re choosing to fly a drone that could drop from the sky at any moment.
Okay, maybe that was a bit dramatic and over the top, but still, I hope that you don’t ignore warning messages, especially ESC warnings. Let’s go ahead and talk about DJI drone ESC’s, how they work, why they are so important, and some of the common problems and solutions we have with the ESC’s.
What is the ESC?
ESC stands for Electronic Speed Controller. Multi-rotor aircraft rely on speed changes of the motors for directional movements. The ESC’s are responsible for telling the motors to speed up or slow down depending on the commands given by the pilot.

Each of the four drone motors has an ESC assigned to it. When a pilot provides a stick adjustment, the command is received by the flight controller onboard the drone, which transmits the information to the electronic speed controllers which then tells the motors to speed up or slow down.
For example, if the pilot increases the height of the drone by pressing up on the left stick, more voltage is evenly sent through each of the four ESC’s which in turn speeds up the motors, increasing the height of the drone.
Another example is if the pilot presses the right stick up the nose of the drone drops down and the drone proceeds to move forward. This is because more voltage was passed through the two rear ESC’s which sped them up.

What causes ESC errors?
When you receive a ESC status error in the DJI GO 4 app it can be difficult to ascertain why it is present. To better know how to fix the problem, we need to figure out if it was a hardware or software issue that caused it in the first place.
Hardware problems
If you recently had a crash then there is a good chance that this is the cause of the ESC status error. You may not think that the crash you had three weeks ago was the reason for the ESC status error that just appeared on the app, but you may be wrong.
Problems after a crash don’t always immediately present themselves. It may take time for that wiring that was jarred loose during the crash to finally tear, or for the motor to be affected by that small piece of broken off plastic that has been rattling around.
A hard landing will be enough to sometimes jar things loose. People have often also experienced ESC errors after replacing or repairing damaged parts on their DJI drones themselves. Before ever attempting to repair or replace a damaged part on your DJI drone it is very important to first check your warranty status as taking apart your drone will void the warranty. I will talk more about the limited warranty and Care Refresh below.
Software problems
It seems like there is always some kind of update available. If it’s not a Precise Fly Safe Database Update, then it’s a firmware update for the AC or RC, or it’s an app update.
It is not unheard of for people to receive an ESC status error after updating their drone’s firmware. If you received an ESC status error after updating your firmware, try refreshing your firmware. If refreshing the firmware, try rolling it back to the previous version.
Alternatively, if there is an update available and you currently have the ESC status error message, try updating the firmware.
There have been reports of people receiving ESC status errors with their brand new DJI drone right out of the box. This may be due to a software issue or it could be a hardware problem from poor handling while in transit.
There have been reports of people receiving ESC status errors with their brand new DJI drone right out of the box.
How to fix the ESC status error
Often times you will get a “cannot takeoff” message in the status bar at the top of the screen. Tapping on that will bring up the aircraft status menu where you can view the ESC status.
Click on “ESC status” to bring up the error message. This will usually tell you which motor(s) has the ESC problem, and the message may give you guidance on what to do next. Usually, the message tells you something vague like “Restart the aircraft. If problems persist contact DJI support”.

If after restarting the drone the error message persists, try updating the firmware on your drone. If a firmware update is not available then just refresh the current firmware version. Updating or refreshing the firmware will usually eradicate the ESC status error if it’s a software issue, but hardware damage will not simply mend itself with a firmware update.
You may have luck getting rid of the ESC error by performing a firmware update, but when you place a new battery in the drone the error may come back. This is because the firmware on the new battery needs to also be flashed with the new firmware. There is no procedure to solely update the battery firmware so go ahead an perform the aircraft firmware update once more.

If the ESC board is damaged, there really isn’t a way of going around it…you’ll need a new one. Although I have yet to complete an ESC repair or replacement myself, I have seen videos and the soldering alone is enough to scare away most people.
I repaired about 1,000 iPhones and iPads during my time as a repair technician, and although I wouldn’t shy away from the chance to replace an ESC board, I certainly wouldn’t take the job lightly due to its complexity.
Unless you have soldering experience and the required tools for the job, I’d strongly suggest sending your drone in to DJI for the ESC repair.

Is your drone under warranty?
Before you think about attempting to take apart your expensive drone to diagnose what is causing the ESC status error, you should check your warranty status. Taking apart the drone will void the limited warranty that comes with the drone.
Taking apart the drone will void the limited warranty that comes with the drone.
Every DJI product comes with a limited warranty that essentially covers you against manufacturer defects, and components of the drone are warrantied for different lengths of periods. Read more about how to find out if your drone is covered by the limited in a post I wrote here.
If the ESC status error is caused by a software issue that isn’t rectified by a firmware update, I would think that DJI would replace your drone under the limited warranty program. If, on the other hand, you crash your drone into a tree and physical damage is what caused the error, your drone will not be covered under the limited warranty.
Care Refresh is an extended warranty available for purchase that covers pilots against user inflicted damage. If you have Care Refresh, you may as well send the drone to DJI and have them repair it since this is the type of thing you likely purchased the extended warranty in the first place for anyway.
Related post: DJI Care Refresh: The Ultimate Guide – DJI’s Care Refresh is a comprehensive warranty. If you chose to purchase Care Refresh when you buy a new drone, DJI will replace it with a new or like-new one up to two times in the event of your drone getting damaged.
More resources
To learn more about what DJI has to say about their ESC’s, check out this article written by DJI that is helpful and informative.
Someone spent a serious amount of time reverse engineering a DJI ESC and proceeded to make a “Handyman’s Guide to the ESC”, which he posted in a forum. The guide is incredibly detailed! Here is the link to that forum.
FAQ
What does ESC stand for?
Electronic Speed Controller.
What does the ESC do?
The ESC controls the speed of the motors which directly alters the in-flight aircraft directional changes.
Why am I receiving an ESC status error?
Hardware can be damaged during a hard landing or crash, or software glitches may be the reason for the errors.
How do I get rid of the ESC errors?
Sometimes a simple restart of the aircraft will clear the errors, and other times a firmware update/refresh will do the trick. If the ESC board is damaged, you will need to send your drone into a repair center, unless you have experience soldering and repairing electronics.
How to see which motor has the ESC error?
In the DJI Go 4 app tap on the aircraft status bar, and scroll down until you see “ESC status”. Tap on that to get a description of the error and which motor has it.
Trevor’s Take
I have not yet had the opportunity to repair or replace a motor or ESC board on a drone before, but I am tempted. When I look at instructional videos and/or guides out there on how to repair components on DJI drones I am a bit hesitant to follow them. I am by no means bashing on anyone who has put content out there in an effort to show the rest of us how to repair our drones, but it takes a whole lot of time and experience to produce quality guides on this type of thing. Not to mention the financial side of having a camera that shows the micro detail necessary to make a helpful guide.
I’m thinking about producing clear and concise instructional videos on how to perform some of the more common drone repairs. Would this be something that you guys would find helpful or would I be better off investing my time into something else? Thanks in advance for the feedback!