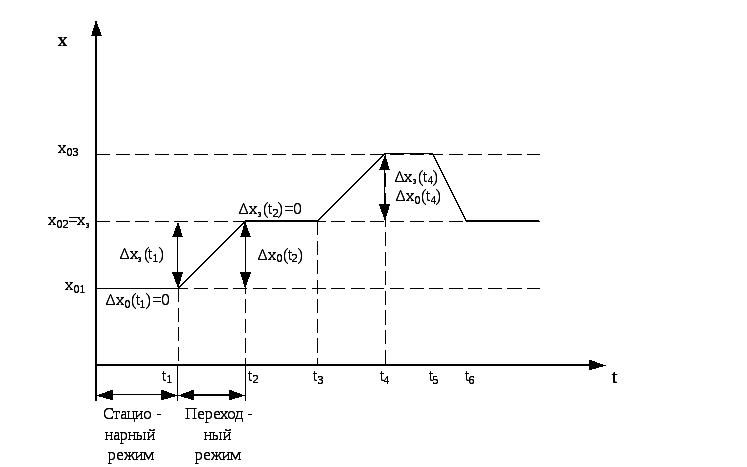
Действительные
значения регулируемой величины в
реальных САР отличаются от предписанных.
Разность между предписанным и
действительным значениями регулируемой
величины называется ошибкой
регулирования.
∆xз(t)
= xз
– x(t)
– ошибка регулирования
хз
– предписанное (заданное) значение
управляемой величины;
x(t)
– ее текущее значение
В
процессе функционирования САР может
переходить от одного состояния,
принимаемого за исходное, в другое.
Разность между текущими значениями
регулируемой величины и значением,
соответствующим исходному состоянию,
принято называть отклонением регулируемой
величины
∆x0(t)
= x(t)
– x0(t) (1.3)
где
xo
– значение регулируемой величины в
исходном состоянии.
x0(t)
– исходное значение регулируемой
величины.
|
|
|
Рис. |
1.4. Статическое и астатическое регулирование
В
зависимости от того, является или нет
ошибка регулирования функцией возмущающего
воздействия в установившемся режиме,
различают статическое
и астатическое
регулирование.
При
статическом регулировании ошибка
регулирования возрастает с увеличением
значения возмущающего воздействия.
Пример статического регулирования
приведен на рис. 1.4, а).
|
|
|
а) |
|
|
|
б) |
|
|
|
в) |
|
Рис. |
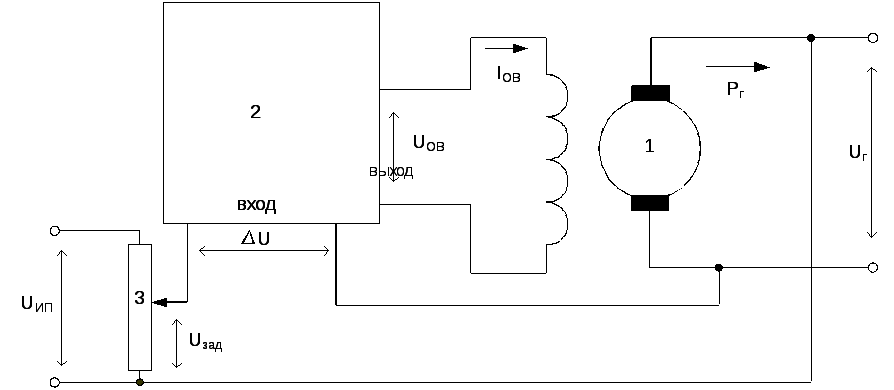
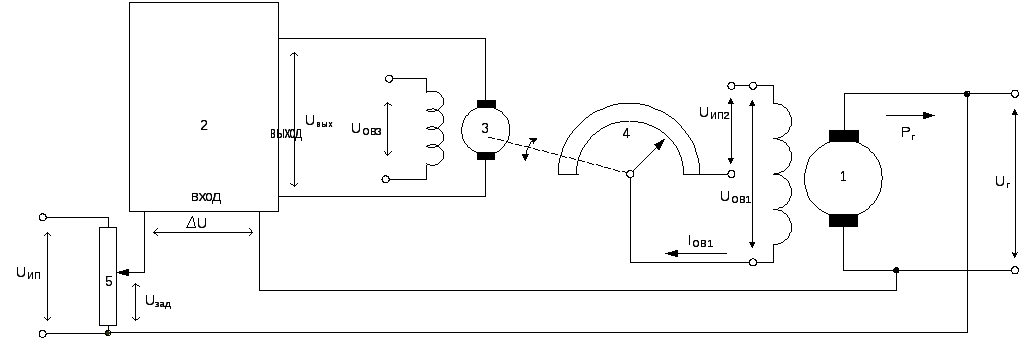
Принцип
действия этого регулятора достаточно
ясно виден из рассмотрения схемы и
особых пояснений не требует. Заметим
лишь, что требуемого возбуждение
генератора 1 осуществляется путем
изменения входного сигнала (ΔU)
электронного усилителя 2. В свою очередь
этот сигнал пропорционален отклонению
регулируемого параметра Uг
от заданного значения Uзад
(ΔU=Uг–Uзад).
Поэтому такое отклонение, т.е. наличие
ΔU,
является неизбежным и должно быть тем
больше, чем больше изменяется величина
внешнего возмущения Pг.
Очевидно, что это отклонение регулируемого
параметра от заданного значения
сохраняется также и в установившемся
режиме.
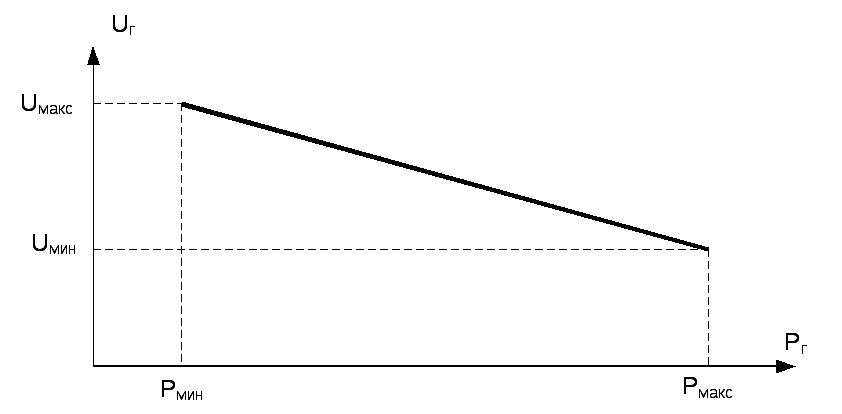
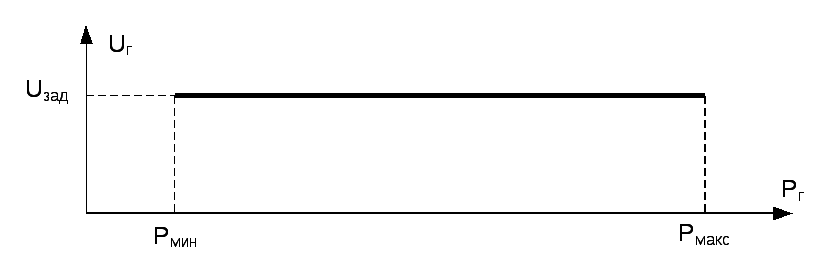
Рабочая
характеристика (зависимость напряжения
генератора от нагрузки – активной
мощности Pг)
статического регулятора приведена на
рис. 1.4, б).
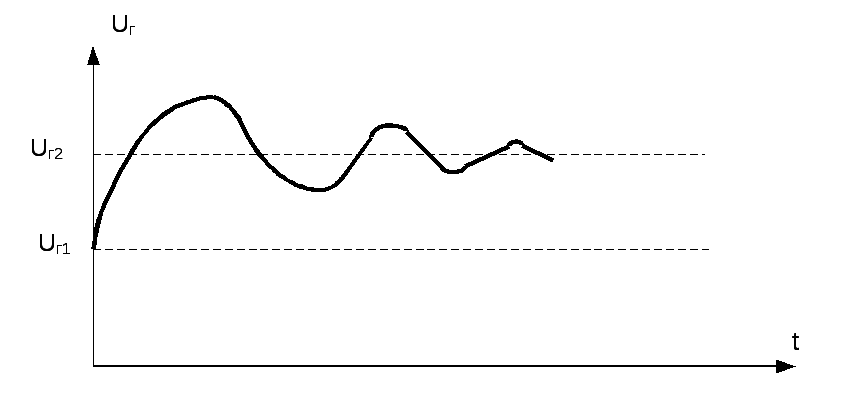
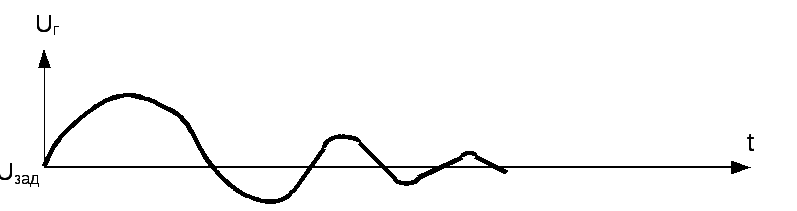
На
рис. 1.4, в)
показан переходный процесс в системе
при уменьшении нагрузки генератора.
Регулированием
с астатической
характеристикой
называется такое регулирование, при
котором в установившемся состоянии
системы отклонение регулируемого
параметра от заданного значения равно
нулю при любой величине внешнего
возмущения. Равновесие системы имеет
место всегда при заданном значении
регулируемого параметра.
Пример
астатического регулирования приведен
на рис. 1.5, а).
|
|
|
а) |
|
|
|
б) |
|
|
|
в) |
|
Рис. |
Характеристика
астатического регулятора приведена на
рис. 1.5, б),
а кривая переходного процесса – на рис.
1.5, в).
При
увеличении нагрузки на генераторе, т.е.
увеличении активной мощности генератора
Pг,
уменьшается напряжение на его выводах
Uг,
что приводит к появлению отклонения
регулируемого параметра Uг
от заданного значения Uзад
(ΔU=Uг–Uзад).
Параметр Uзад
задается
регулировочным реостатом 5. При этом
появляется напряжение на якоре двигателя
постоянного тока Uвых,
и двигатель начинает перемещать контакт
регулировочного реостата 4 по часовой
стрелке, что приводит к увеличению тока
возбуждения генератора IОВ1,
а значит, и напряжения на его выводах
Uг.
Параметр Uг
будет увеличиваться до тех пор, пока
ошибка регулирования ΔU
не станет равной 0.
Астатические
САР обеспечивают высокую точность
регулирования. Однако по сравнению со
статическими они являются более сложными
и инерционными, т.е. процессы регулирования
в них являются замедленными.
1.5.
Линейные и нелинейные системы. Линеаризация
уравнений
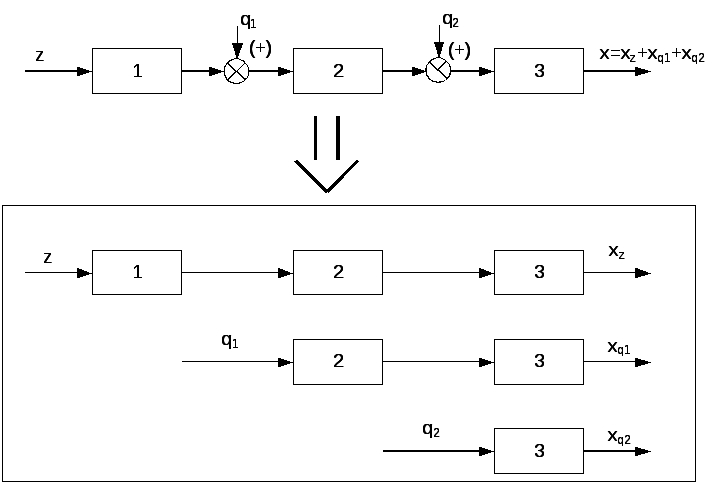
Системы,
процессы в которых могут быть описаны
линейными дифференциальными уравнениями
с постоянными коэффициентами, называются
линейными.
Для линейных систем применим принцип
суперпозиции, позволяющий рассматривать
независимое прохождение воздействий,
что дает существенное упрощение (рис.
1.6).
|
|
|
Рис. |
Нелинейной
называется система, для описания
процессов в которой приходится применять
одно или несколько нелинейных уравнений.
К нелинейным относятся уравнения,
коэффициенты которых зависят от значений
переменных величин или их производных,
а также уравнения, содержащие произведения
или степени (выше первой) этих величин.
Строго
говоря, линейных САУ в технике практически
нет или очень мало. Однако большинство
систем при определенных условиях могут
рассматриваться как линейные. Так, если
оценивать поведение системы при малых
отклонениях величин от исходных значений,
то в большинстве случаев имеющей место
нелинейностью можно пренебречь. Такая
возможность имеет математическое
обоснование.
Пусть
имеем некоторую непрерывную функцию
F(x)
(рис. 1.7).
Если
аргумент X
получил приращение ΔX
от исходного значения Xo,
то функция получит приращение ΔF(X).
Новое значение функции F(X)
можно разложить в ряд Тейлора:

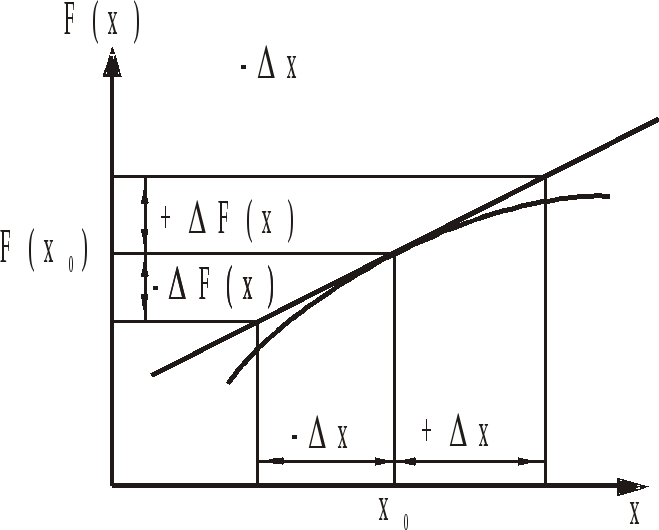
Рис.
1.7. Пример линеаризации нелинейной
функции
При
малых значениях Δx
можно ограничиться только первыми двумя
членами разложения, т.к. остальные имеют
более высокий порядок малости, т.е. можно
считать
![]() ,
,
где
![]() .
.
Теоретически
это означает, что на интервале ±Δx
(рис. 1.6) кривая F(x)
заменяется прямой линией, являющейся
касательной при x=xo.
Таким
образом, если составлять уравнение
системы не для полных значений величин,
а только для отклонений, то эти уравнения
будут линейными. Такая операция называется
линеаризацией
уравнений.
Следует, однако, отметить, что это
справедливо только для тех случаев,
когда нелинейные функции являются
непрерывными и имеют непрерывные
производные при x=xo.
Пример
линеаризации нелинейного элемента
системы.
В
качестве типового элемента, уравнение
которого подлежит линеаризации, возьмем
RL-элемент,
часто встречающийся в электрических
системах регулирования и изображенный
на рис. 1.8, а). Пусть входной и выходной
величинами такого элемента являются
напряжения.
|
|
|
|
а) |
б) |
|
Рис. |
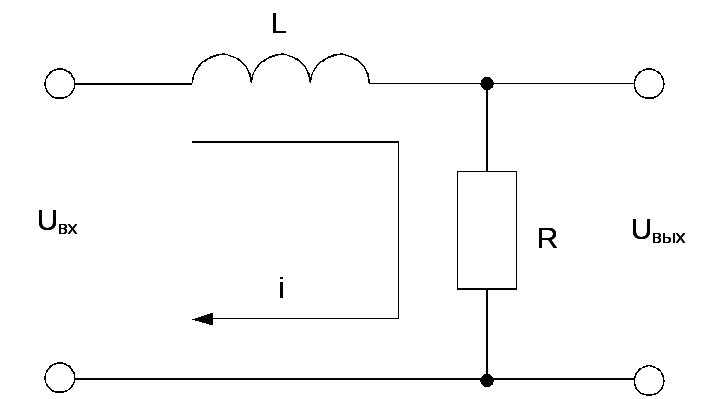
Предположим
сначала, что активные сопротивления и
индуктивность не зависят от протекающего
через них тока, т.е. будем считать, что
элемент является линейным.
Тогда
дифференциальное уравнение элемента
в случае, если потокосцепление
катушки
элементазависит от тока линейно, т.е.
если индуктивность L=/i
не зависит от тока и является величиной
постоянной, имеет вид:
![]()
Обозначив
![]()
и
![]() ,
,
учитывая, что
![]() ,
,
и пользуясь операторной (символической)
формой записи, в которой принято
![]() ,
,
получим:
|
|
(1.3) |
Предположим
теперь, что в рассматриваемом примере
индуктивность зависит от тока и,
следовательно, элемент является
нелинейным. Тогда уравнение (1.3) для
такого элемента неправомерно, ибо
потокосцепление
зависит от тока нелинейно и, следовательно,
L=/i
есть величина переменная. Для
усатновившегося режима элемента при
входном постоянном напряжении uвх
потокосцепление 0
тоже постоянно во времени и, следовательно,
![]() .
.
Тогда можно написать:
![]() .
.
Изменение
входного напряжения повлечет за собой
изменение тока и выходного напряжения.
Текущие
значения uвх
и uвых
и i
можно представить так:
![]() ;
;
![]() ;
;
![]() ,
,
где
Δuвх,
Δuвых
и Δi
– отклонения
соответствующих величин от их
установившихся значений.
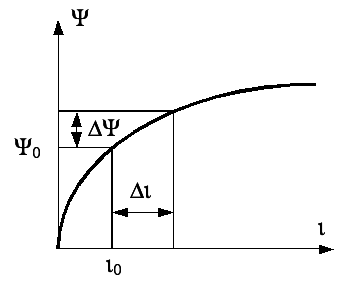
Пусть
потокосцепление является нелинейной
функцией тока, как это показано на рис.
1.8, б).
Эту функцию можно разложить в ряд:
|
|
(1.4) |

При
достаточно малых отклонения тока можно
ограничиться первыми двумя членами
ряда. Величина
![]()
определяется тангенсом угла наклона
касательной к кривой, приведенной на
рис. 1.8,б), в
точке с абсциссой i0.
Обозначив
динамическую индуктивность элемента
для тока i0
через Lд,
т. е.
![]() ,
,
можем написать:
![]() .
.
Так
как
![]() ,
,
то будем иметь:
![]() .
.
Исходное
уравнение запишется теперь так:
![]() ,
,
или,
подставляя ранее найденное выражение
для uвых0,
получим:
![]() .
.
Последнее
выражение является линейным дифференциальным
уравнением с постоянными коэффициентами,
которое можно записать в операторной
форме так:
|
|
(1.5) |
где
![]()
и k=1.
Оно
справедливо только для малых отклонений
входной и выходной величины относительно
начального значения uвх0.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Ошибка регулирования
- Ошибка регулирования
- — имеющая место и обычно накапливающаяся в процессе выполнения регулирующих и управляющих операций ошибка. В кибернетике ошибку регулирования стремятся уменьшить и обычно используют в качестве сигнала для того или иного нового, более совершенного, контура (механизма) внешней обратной связи. В общественных системах ошибка регулирования обычно является действующим фактором для системы внутренней обратной связи, то есть ведет к накоплению в обществе тех или иных проблем, нарастанию напряженности либо необоснованной безмятежности, хаоса (неразберихи) либо зарегламентированности и обюрокрачивания и т.п.
Теоретические аспекты и основы экологической проблемы: толкователь слов и идеоматических выражений. — Чувашский государственный университет им. И.Н.Ульянова. УНПП «Лаборатория проблем цивилизации».
.
1998.
Смотреть что такое «Ошибка регулирования» в других словарях:
-
ошибка регулирования — — [Я.Н.Лугинский, М.С.Фези Жилинская, Ю.С.Кабиров. Англо русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.] Тематики электротехника, основные понятия EN error … Справочник технического переводчика
-
ошибка регулирования в процентах — — [Я.Н.Лугинский, М.С.Фези Жилинская, Ю.С.Кабиров. Англо русский словарь по электротехнике и электроэнергетике, Москва, 1999] Тематики электротехника, основные понятия EN percent deviation … Справочник технического переводчика
-
ошибка регулирования района — — [Я.Н.Лугинский, М.С.Фези Жилинская, Ю.С.Кабиров. Англо русский словарь по электротехнике и электроэнергетике, Москва, 1999] Тематики электротехника, основные понятия EN area control errorACE … Справочник технического переводчика
-
Астатическая система регулирования — система автоматического регулирования режимов работы промышленных установок, систем автоматического управления и др., в которой ошибка регулирования стремится к нулю независимо от размера воздействия, если последнее принимает… … Большая советская энциклопедия
-
Динамическая ошибка — динамическая погрешность, динамическое отклонение, разность между требуемым и действительным значениями регулируемой величины, возникающая и измеряющаяся в процессе регулирования; см. Регулирование автоматическое … Большая советская энциклопедия
-
Теория автоматического управления — Содержание 1 История 2 Основные понятия 3 Функциональн … Википедия
-
Статическая система — Статическая система это такая система автоматического регулирования, в которой ошибка регулирования стремится к постоянному значению при входном воздействии, стремящемся к некоторому постоянному значению. Иными словами статическая система… … Википедия
-
полный размах колебаний регулируемой величины от заданного значения — полный размах отклонений регулируемой величины от заданного значения ошибка регулирования — [Я.Н.Лугинский, М.С.Фези Жилинская, Ю.С.Кабиров. Англо русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.] Тематики… … Справочник технического переводчика
-
Регулирование автоматическое — (от нем. regulieren регулировать, от лат. regula норма, правило) поддержание постоянства (стабилизация) некоторой регулируемой величины, характеризующей технический процесс, либо её изменение по заданному закону (программное… … Большая советская энциклопедия
-
Трунов, Игорь Леонидович — В Википедии есть статьи о других людях с такой фамилией, см. Трунов. Игорь Леонидович Трунов Портрет Род деятельности: Адвокат Дата рождения: 1961 год(1 … Википедия
Ошибка — регулирование
Cтраница 1
Ошибка регулирования существует, но она не является ф-цией нагрузки и не наз. При всяком же отклонении х от заданного значения равновесие регулятора нарушается и начинается непрерывное изменение у.
[2]
Ошибка регулирования определяется величиной шага перемещения цапфы валка при срабатывании реле. Верхнее и нижнее положение подвижного валка, как это было отмечено ранее, ограничивается конечными выключателями.
[4]
Ошибка регулирования характерна для статических систем. Для астатических систем она равна нулю.
[5]
Ошибкой регулирования называется разность между требуемым законом изменения регулируемой величины и его действительным законом изменения.
[6]
Дисперсия ошибки регулирования служит критерием качества АСР при случайных входных сигналах.
[7]
В результате ошибка регулирования бесконечно быстро сводится к нулю.
[9]
Для определения ошибки регулирования по возмущающему воздействию структурную схему на рис. 8 — 20 а необходимо преобразовать.
[10]
Оно пропорционально ошибке регулирования и может быть использовано в качестве сигнала управления схемы регулирования напряжения.
[12]
Желательно, чтобы ошибка регулирования была бы при этом уровне минимальна. Выражение (7.33) определяет текущее значение ошибки, каким-то образом распределенное по партии деталей, обработанных данной системой, причем распределение ошибки связано с распределением твердости.
[13]
Статическим системам свойственна ошибка регулирования: они никогда не возвращают регулируемый параметр к заданному значению.
[14]
Желательно, чтобы ошибка регулирования была бы при этом уровне минимальна. Выражение (7.33) определяет текущее значение ошибки, каким-то образом распределенное по партии деталей, обработанных данной системой, причем распределение ошибки связано с распределением твердости.
[15]
Страницы:
1
2
3
4
5