Принцип действия
сельсинов.
В системах автоматического контроля и
регулирования иногда необходимо
передавать на расстояние заданный угол
поворота вала контролируемого или
регулируемого объекта или получать
информацию об угловом положении вала
этого объекта. Для этой цели применяют
системы дистанционной передачи угла
на электрических машинах синхронной
связи, называемых сельсинами. Сельсины
относятся к информационным электрическим
машинам, так как преобразуют угол
поворота в электрический сигнал и,
наоборот, электрический сигнал в угловое
перемещение.
На рис. 1.1 показаны
структурные схемы систем дистанционной
передачи угла поворота вала с помощью
сельсина-датчика СД и сельсина-приемника
СП, соединенных линией связи ЛС. При
повороте вала В на угол α. (рис. 1.1, а)
сельсином-датчиком вырабатывается
соответствующий этому углу сигнал,
который передается по линии связи на
сельсин-приемник СП, где он преобразуется
в угловое перемещение ротора СП на угол
α. Рассмотренная система называется
индикаторной, так как вал сельсина-приемника
поворачивает стрелку индикатора И,
отмечающую на шкале угол поворота
вала В. Индикаторная система только
передает информацию об угловом положении
контролируемого вала.

Рисунок 1.2. Структурные схемы систем
дистанционной передачи угла поворота
вала на сельсинах: индикаторная (а),
трансформаторная (б).
Если требуется
воспроизвести угол поворота α вала В
на каком-либо рабочем механизме, то
система дополняется усилителем
мощности У и исполнительным двигателем
ИМ (рис. 1.1, б), который через редуктор Р
создает на валу рабочего механизма РМ
вращающий момент, достаточный для
поворота вала на угол α. Одновременно
поворачивается ротор сельсина-приемника
СП на угол α. Такая система дистанционной
передачи называется трансформаторной.
Сельсины применяют
также в системах электрического вала,
осуществляющих синхронное вращение
валов нескольких механизмов, находящихся
на расстоянии друг от друга.
В нашем случае
система дистанционной передачи угла
является трансформаторной. Рассмотрим
её подробно.
Трансформаторная
система дистанционной передачи угла
используется для передачи угла
поворота на вал рабочего механизма,
когда необходим значительный вращающий
момент. Основные элементы трансформаторной
системы (рис. 1.3): сельсин-датчик СД,
сельсин-приемник СП, усилитель мощности
У, исполнительный двигатель ИМ и
редуктор Р, предназначенный для редукции
частоты вращения и усиления вращающего
момента. Усилитель, мощности У используется
для усиления мощности сигнала на выходе
сельсина-приемника до уровня, достаточного
для приведения в действие исполнительного
двигателя ИМ Трансформаторная система
передачи следящая система с обратной
связью по положению вала регулирующего
органа рабочего механизма РО. Редуктор
Р системы имеет два выхода: один
присоединяется к валу рабочего механизма,
другой – к валу сельсина-приемника.
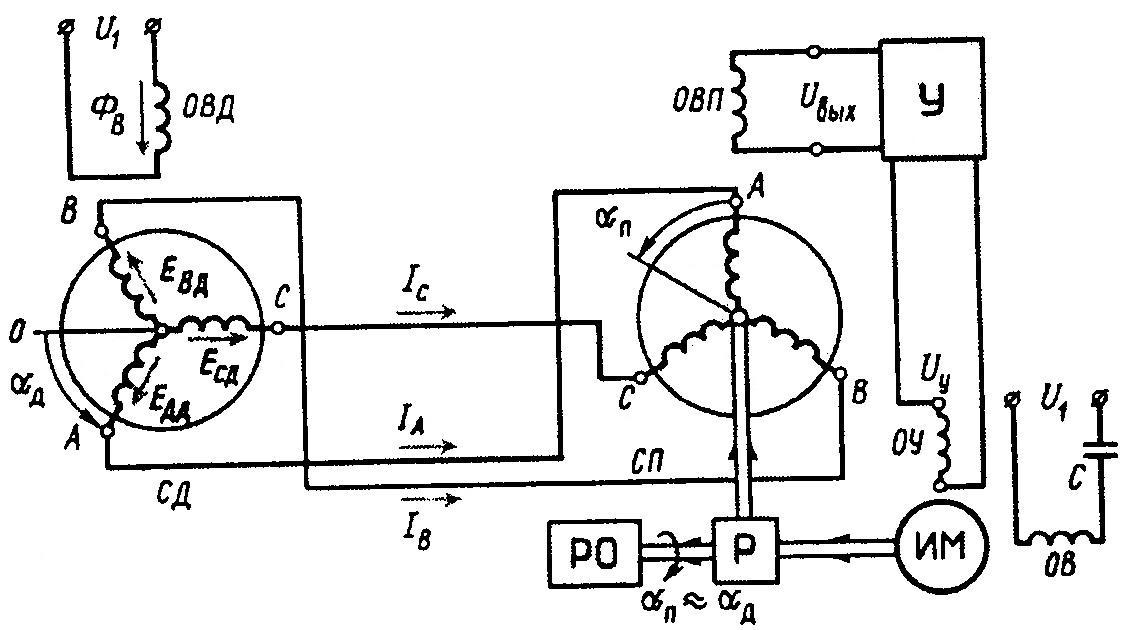
Рисунок 1.3. Схема трансформаторной
системы дистанционной передачи угла.
Рассмотрим принцип
работы трансформаторной системы. При
включении в сеть обмотки возбуждения
сельсина-датчика ОВД пульсирующий
магнитный поток возбуждения наводит в
фазах обмотки синхронизации электродвижущие
силы, величина которых зависит от угла
поворота ротора датчика αд
относительно продольной оси. Согласованным
положением роторов датчика и приемника
в трансформаторной системе считают
положение, когда одноименные фазы
обмотки синхронизации смещены
относительно друг друга на 90°. Поэтому
(см. рис. 1.3) отсчет угла αд
в датчике ведется от оси, перпендикулярной
оси обмотки возбуждения. Учитывая это,
ЭДС фазы обмоток синхронизации
датчика
![]()
![]()
![]()
![]()
Электродвижущие
силы создают токи в цепи синхронизации

![]()
В трансформаторной
системе токи синхронизации создаются
только электродвижущими силами,
наведенными в датчике, а не разностью
ЭДС, как в индикаторной системе. Токи
синхронизации, проходя по соответствующим
обмоткам фаз сельсина-приёмникa
создают пульсирующие МДС, значения
которых принимаем со знаком минус:

![]()
где
![]() .
.
Р![]() езультирующая
езультирующая
МДС синхронизации по продольной оси
(рис. 1.4, а) Fпd
создает пульсирующий магнитный поток
по продольной оси Фпd,
который наводит в обмотке возбуждения
приемника ОВП ЭДС
![]() ,
,
где Еmax
– действующее значение ЭДС, наводимой
в обмотке возбуждения приемника при
заданном угле поворота на
сельсине-датчике αд
= 90° и
положении ротора приемника, при
котором ось обмотки фазы синхронизации
А расположена по оси обмотки возбуждения.
Обмотка возбуждения
приемника в трансформаторной системе
выполняет функцию генераторной обмотки.

Рисунок 1.4. Диаграммы МДС сельсина-приёмника
трансформаторной системы.
Сигнал напряжения
на выходе приемника Uвых
≈ Евых
поступает на вход усилителя мощности
У, на выход которого включена обмотка
управления ОУ исполнительного двигателя
М. При этом ротор двигателя приходит
во вращение, которое через понижающий
редуктор Р передается, на вал рабочего
механизма РО и на ротор сельсина-приемника
СП. По мере отработки заданного угла αд
МДС синхронизации по продольной оси
Fпd
постепенно уменьшается, следовательно,
уменьшается напряжение сигнала Uвых.
После того как ротор приемника будет
повернут на угол αп
≈ αд,
выходной сигнал напряжения уменьшится
до Uвых ≈
0 и трансформаторная система придет в
равновесие. Для пояснения обратимся
к рисункам 1.3 и 1.4. Допустим, что на
сельсине-датчике СД задан угол поворота
αд
= 60° против часовой стрелки, тогда МДС
фазы обмотки синхронизации приемника
равны
![]() ;
;
![]()
![]() ;
;
![]() .
.
Переходя к
относительным значениям МДС, запишем
![]()
![]() ;
;
![]() ;
;
![]() .
.
Из диаграммы МДС
(рис. 1.4, а) получим относительное значение
результирующей МДС обмотки синхронизации
приемника по продольной оси

![]() .
.
После поворота
ротора приемника на угол αп
= αд
= 60° диаграмма МДС синхронизации
приемника примет вид, представленный
на рисунке 1.4, б. Из диаграммы следует,
что результирующая МДС по продольной
оси равна нулю:

![]() .
.
Особенность работы
трансформаторной системы состоит в
том, что сельсин-приемник этой системы
самостоятельно не отрабатывает заданный
угол поворота, а только выдает сигнал
на включение исполнительного
двигателя, который осуществляет отработку
заданного угла поворота. Применив в
системе исполнительный двигатель
требуемой мощности, можно посредством
трансформаторной системы
передачи угла
управлять угловым положением вала
рабочего механизма.
Точность работы
трансформаторной системы зависит от:
формы и распределения магнитной
индукции в воздушном зазоре сельсинов;
остаточной ЭДС: удельного выходного
напряжения; удельной выходной мощности;
магнитной несимметрии; сопротивления
линии связи; количества приемников,
подключенных к одному датчику.
Для обеспечения
синусоидальной зависимости Uвых
= f(αд)
необходимо, чтобы график распределения
магнитной индукции вдоль воздушного
зазора по периметру ротора был
синусоидальным. С этой целью в
трансформаторных системах применяют
сельсины неявнополюсной конструкции
(рис. 1.5, в).

Рисунок 1.5. Магнитные системы однофазных
контактных сельсинов с явнополюсным
статором (а), с явнополюсным ротором
(б), неявнополюсная.
Остаточная ЭДС
сельсина-приемника Еост
– это ЭДС на выходе приёмника при
согласованном состоянии системы. Обычно
Еост
= 0,2 ÷ 0,5 В. Причины наведения остаточной
ЭДС: всякого рода дефекты, возникающие
при изготовлении сельсинов; емкостная
связь между обмотками возбуждения и
синхронизации и т. п. Для исключения
влияния остаточной ЭДС на работу системы
требуется такая настройка усилителя
мощности, чтобы сигнал Uвых
= = Еост
создавал напряжение на выходе усилителя,
меньшее напряжения трогания исполнительного
двигателя.
Удельное выходное
напряжение сельсина-приемника – это
напряжение Uвых,
приходящееся на один градус угла
рассогласования:
![]()
![]() .
.
Удельная выходная
мощность Руд
– это мощность, которую можно снять с
выходной обмотки сельсина-приемника
при угле рассогласования в один
градус. Минимально допустимым значением
мощности на выходе приемника считается
такое значение, при котором на выходе
усилителя появляется напряжение.
Влияние сопротивления
линии связи на точность трансформаторной
системы заключается в том, что сопротивление
проводов этой линии уменьшает токи в
обмотках синхронизации. Это уменьшает
МДС по продольной оси сельсина-приемника,
а, следовательно, уменьшает удельное
напряжение сельсина-приемника и точность
системы.
Ток в обмотке
возбуждения сельсина-приемника создает
реакцию этой обмотки, ослабляющую ЭДС
Евых.
Для уменьшения реакции желательно,
чтобы усилитель мощности имел достаточно
большое входное сопротивление, что
уменьшает ток в обмотке возбуждения
приемника.
Количественной
оценкой точности сельсина-приёмника
является погрешность угла рассогласования,
град,
![]() ,
,![]()
где Θ1max
и Θ2max
– максимальное положительное и
отрицательное отклонение положений
ротора сельсина-приёмника относительно
углов, задаваемых датчиком при его
повороте на 360° по часовой стрелке, а
затем против часовой стрелки.
Конструкция
сельсинов.
По конструкции
различают: контактные и бесконтактные
сельсины. Контактные
сельсины.
Отличительный признак контактных
сельсинов – наличие у них контактных
колец и щеток, посредством которых
обмотка ротора соединяется с внешней
цепью. Обычно сельсины делают
двухполюсными. Магнитную систему
контактного сельсина (сердечники
статора и ротора) делают из листовой
электротехнической стали. Сельсины
могут быть явнополюсными и неявнополюсными.
В явнополюсных сельсинах один из
элементов магнитопровода (статор
или ротор) имеет два явно выраженных
полюса с полюсными катушками обмотки
возбуждения ОВ. Тогда другой элемент
(ротор или статор) делают неявнополюсным
с распределенной обмоткой синхронизации
ОС, состоящей из трех обмоток фаз,
сдвинутых в пространстве относительно
друг друга на 120° (рис. 1.5, а, б). Если ротор
сельсина-приемника явнополюсный, то на
его сердечнике обычно располагают
демпферную обмотку ДО в виде
короткозамкнутого витка, ось которого
перпендикулярна оси полюсов. В
неявнополюсных сельсинах обмотки
статора и ротора делают распределенными.
При этом обмотки синхронизации ОС и
возбуждения ОВ могут быть расположены
как на роторе, так и на статоре (рис. 1.5,
в).
В индикаторных
системах обычно применяют явнополюсные
сельсины, так как они имеют повышенное
значение удельного синхронизирующего
момента (см. рис. 1.6, б, график 1). В
трансформаторных системах используют
неявнополюсные сельсины, так как их
удельный синхронизирующий момент
меньше, чем у явнополюсных (см. рис. 1.6,
б, график 2), но распределение магнитной
индукции в воздушном зазоре практически
синусоидально, что обеспечивает им
необходимую точность в трансформаторной
системе.
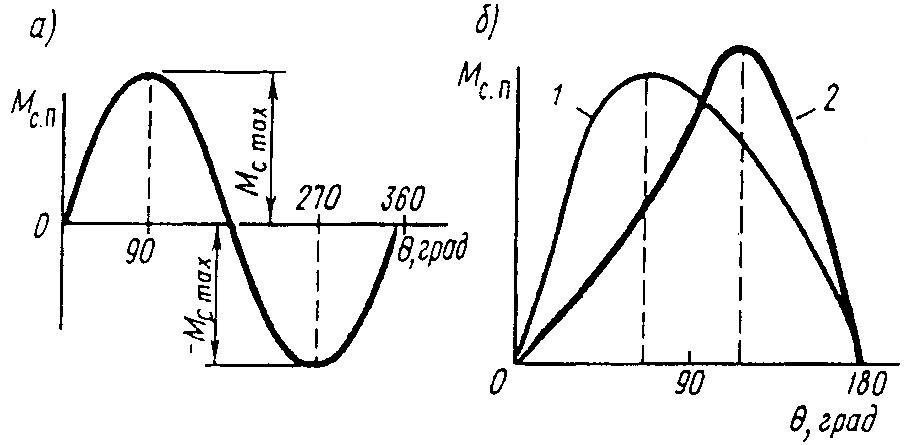
Рисунок 1.6. Графики зависимости
синхронизирующего момента сельсина от
угла рассогласования.
На рисунке 1.7
показано устройство контактного сельсина
с неявнополюсной магнитной системой.
Обмотка синхронизации 4 расположена
на сердечнике статора 3, а обмотка
возбуждения 2 – на сердечнике ротора
1. Контактные кольца 5 и щетки обычно
изготавливают из сплава, содержащего
серебро, что способствует более надежной
и продолжительной работе этого контактного
узла сельсинов. Обмотка возбуждения
может быть расположена как на роторе,
так и на статоре. При расположении ее
на ротope число контактных колец равно
двум. В этом случае через кольца и щетки
ток возбуждения проходит непрерывно,
даже когда система согласована.
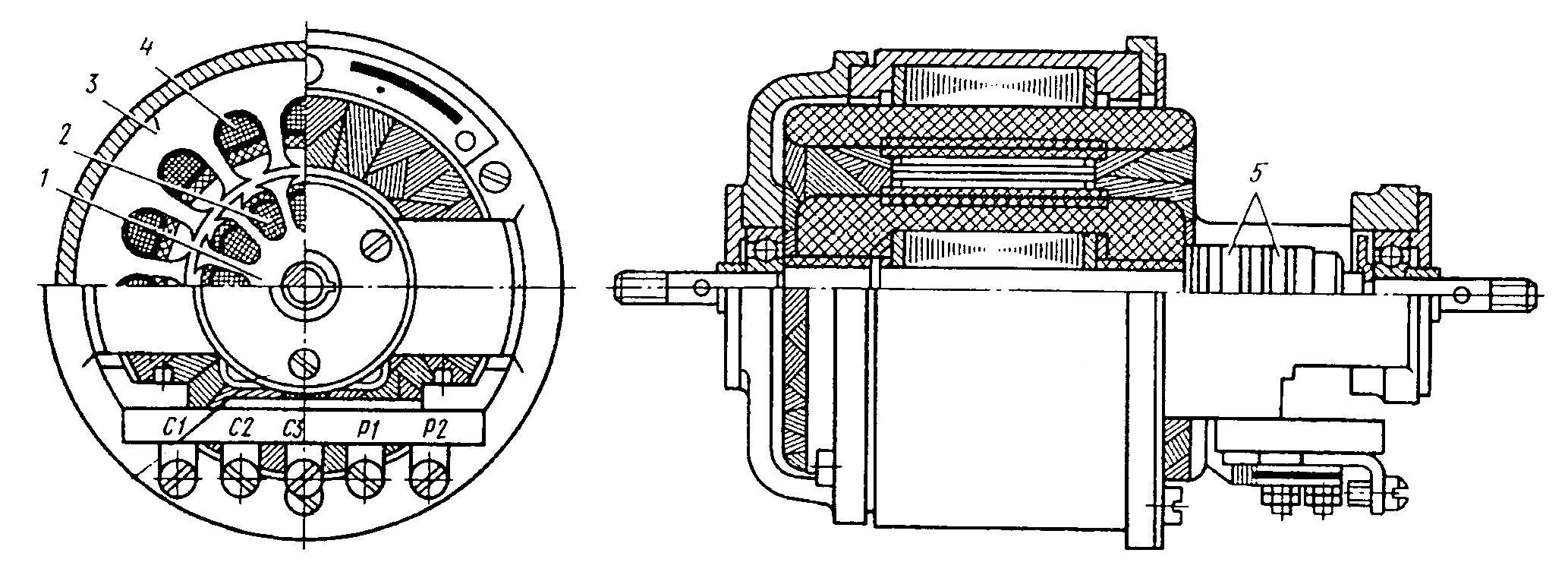
Рисунок 1.7. Устройство контактного
сельсина.
Чтобы увеличить
надежность контактных сельсинов, кольца
и щетки обычно изготавливают из сплавов,
содержащих серебро. Однако и эта мера
полностью не избавляет контактные
сельсины от присущих им недостатков.
Бесконтактные
сельсины.
Наибольшее применение в устройствах
автоматики получили бесконтактные
сельсины, не имеющие скользящих
электрических контактов (колец и щеток).
Эти сельсины отличаются от контактных
высокой точностью и стабильностью
характеристик при колебаниях
температуры, влажности и т.п., а также
высокой эксплуатационной надежностью.
В настоящее время
применяются бесконтактные сельсины
двух конструкций: сельсины с двумя
обмотками на статоре и сельсины с
кольцевым трансформатором. Сельсины с
двумя обмотками на статоре были
разработаны российскими учеными А. Г.
Иосифьяном и Д. В. Свечарником. На рисунке
1.8 показана конструктивная схема такого
сельсина. Ротор 6 представляет собой
цилиндр из ферромагнитного материала
(стали), состоящий из двух магнитно
разделенных частей, называемых полюсами.
В качестве магнитной изоляции, разделяющей
полюса ротора друг от друга, используется
алюминиевая прослойка. Эта же прослойка
скрепляет полюса ротора. С торцевых
сторон сельсина расположены тороидальные
сердечники 1, выполненные из тонколистовой
электротехнической стали. Внутренняя
поверхность этих сердечников расположена
над ротором, а к их внешней поверхности
примыкают стержни внешнего магнитопровода
4. Однофазную обмотку возбуждения
сельсина выполняют в виде двух дисковых
катушек 2, расположенных с противоположных
сторон статора между обмоткой
синхронизации 5 и тороидальными
сердечниками 1.

Рисунок 1.8. Конструктивная схема
бесконтактного сельсина конструкции
Иосифьяна и Свечарника.
Магнитный поток
возбуждения, замыкаясь вокруг правой
дисковой катушки 2 по правому
тороидальному сердечнику 1, через
воздушный зазор проходит в один из
полюсов ротора 6. Благодаря немагнитному
промежутку 7, разделяющему полюса ротора,
этот магнитный поток проходит через
воздушный зазор между ротором и статором
в сердечник статора 3 с обмоткой
синхронизации 5. Пройдя по зубцам и
спинке этого сердечника, поток через
воздушный зазор проходит во второй
полюс ротора. Затем через зазор и левый
тороидальный сердечник 1 вокруг левой
дисковой катушки 2 он попадает в стержни
внешнего магнитопровода 4 и замыкается
в правом тороидальном сердечнике 1.
Таким образом, в
процессе работы сельсина пульсирующий
магнитный поток возбуждения замыкается
в магнитной системе сельсина, сцепляясь
с обмоткой синхронизации на сердечнике
статора. При этом, если поворачивать
ротор сельсина, то вместе с полюсами
ротора будет поворачиваться и магнитный
поток, т.к. В бесконтактном сельсине,
так же как и в контактном, потокосцепление
потока возбуждения с обмоткой
синхронизации зависит от пространственного
положения (угла поворота) ротора.
Благодаря разделению ротора бесконтактного
сельсина на магнитно-изолированные
полюса, обмотки синхронизации и
возбуждения можно расположить на статоре
и отказаться от контактных колец и
щеток.
Магнитный поток
возбуждения (см. рис. 1.8), замыкаясь в
магнитопроводе сельсина, четыре раза
проходит через воздушный зазор. Поэтому
для создания в сельсине требуемого
магнитного потока требуется
значительная МДС обмотки возбуждения,
что является причиной повышения
габаритных размеров бесконтактного
сельсина по сравнению с контактным
сельсином.
В последнее время
применяются бесконтактные сельсины с
кольцевым трансформатором (рис. 1.9).
Обмотка синхронизации 2 такого сельсина
расположена на стaтopе 4, обмотка возбуждения
1 – на роторе 3. Питание обмотки возбуждения
осуществляется посредством кольцевого
трансформатора. Магнитопровод этого
трансформатора состоит из двух частей,
разделенных воздушным зазором. Неподвижная
часть 5 с первичной обмоткой 6 расположена
на статоре, а вращающаяся часть 8 со
вторичной обмоткой 7 – на роторе.

Рисунок 1.9. Устройство бесконтактного
сельсина с кольцевым трансформатором.
Энергия из первичной
обмотки трансформатора 6 передается во
вторичную обмотку 7, связанную с обмоткой
возбуждения сельсина. Магнитный поток
Ф в кольцевом магнитопроводе
трансформатора дважды проходит через
воздушный зазор, что является причиной
повышенного значения намагничивающего
тока, а следовательно, и габаритных
размеров трансформатора. Однако при
частотах 400, 500 и 1000 Гц, для которых
предназначен рассматриваемый сельсин,
кольцевой трансформатор имеет небольшие
габаритные размеры, позволяющие
расположить его в корпусе сельсина.
В системах
дистанционной передачи угла применяются
дифференциальные сельсины, назначение
которых – воспроизводить угол поворота,
равный сумме или разности углов, заданных
двумя сельсинами-датчиками.
Дифференциальный сельсин имеет две
трехфазные обмотки, одна из которых
расположена в пазах неявнополюсного
статора, а другая – в пазах
неявнополюсного ротора. Вывод обмотки
ротора для подключения к внешней сети
осуществлен посредством трех контактных
колец и щеток.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Актуальные сообщения о неисправностях отображаются циклически (10 с) на короткое время во время работы на дисплейном программном переключателе. Дополнительно они заносятся в память неисправностей Er и oE.
| Сообщ. | Описание ошибок |
|---|---|
| 01 | Неисправно устройство управления (24 В) |
| 02 | Неисправно устройство управления (DCU100, 12 В) |
| 03 | Нет напряжения 230 В |
| 07 | Пожарная тревога: Сигнализатор дыма активный или отключение сети. *** |
| 08 | Дымовая тревога: Сигнализатор дыма активный. **** |
| 10 | Ошибочный сигнал сельсин-датчика (Датчик угловых перемещений) |
| 11 | Короткое замыкание, слишком большой ток через двигатель 1 |
| 12 | Неисправен двигатель 1 |
| 13 | Предохранительный датчик закрывания 1 (SIS1) не срабатывает или срабатывает более, чем через 4 мин |
| 14 | MPS: Разрыв провода – механический программный переключатель |
| 15 | Нет связи между устройством управления и дисплейным программным переключателем |
| 16 | Стопор не блокируется |
| 17 | Стопор не деблокируется |
| 18 | Сообщения о блокировке и деблокировке возникают одновременно |
| 19 | Предохранительный датчик закрывания 2 (SIS2) не срабатывает или срабатывает более, чем через 4 мин |
| 25 | Помехи при „открывании“ ** |
| 26 | Инициализация: Не достигается запрограммированная ширина открывания. |
| 27 | Предохранительный датчик открывания 1 (SIO1) или предохранительный датчик открывания 2 (SIO2) активен * |
| 28 | Неисправно реле двигателя на главной плате |
| 29 | Предохранительный датчик открывания 2 (SIO2) не срабатывает или срабатывает более, чем через 1 мин * |
| 32 | Антисаботажный контакт активен |
| 33 | Шлюзовая дверь – тамбурная дверь: От второго привода не поступает сообщений * |
| 34 | TPS: Нет связи с устройством управления – клавишный программный переключатель. |
| 35 | Аптека: Срабатывает более, чем через 4 мин |
| 36 | Внутренняя ошибка резервирования устройства управления |
| 37 | KI1: Датчик движения неисправен или срабатывает более, чем через 4 мин |
| 38 | KI2: Датчик движения неисправен или срабатывает более, чем через 4 мин ** |
| 39 | KA: Срабатывает более, чем через 4 мин |
| 40 | KB: Срабатывает более, чем через 4 мин |
| 41 | SIO1: Предохранительный датчик открывания 1 (SIO1) не срабатывает или срабатывает более, чем через 1 мин * |
| 42 | NOTVER (аварийная блокировка): Срабатывает более, чем через 4 мин * |
| 44 | STOP: STOP активный. * |
| 45 | Привод DCU100 горячий: Температура двигателя или устройства управления выше 110 °C |
| 46 | Термопара двигателя: Неисправна термопара двигателя |
| 47 | Термопара DCU100: Неисправна термопара устройства управления |
| 48 | Привод DCU100 перегрет: Температура двигателя или устройства управления выше 115 °C |
| 50 | DCU1-T30: Неисправность при тестировании расширения DCU1-T30 *** |
| 51 | DCU1-2M-LL, DCU1-2M-RWS: Неисправность тормоза (выходы PA1 / PA2 не размыкаются). Нажата аварийная клавиша (тормоз двигателя отключен аварийной клавишей, дверь сразу же открывается). |
| 53 | Ручная разблокировка: Lock A — разблокирован вручную.. |
| 54 | Связь DPS: Связь с DPS нарушена. |
| 60 | Неисправность на главной плате DCU100 |
| 61 | Аккумулятор разряжен, не подключен или неисправен |
| 63 | Программное обеспечение главной платы не соответствует ПО дополнительной платы ** |
| 64 | Открывание при тестировании: Дверь не открывается за требуемое время открывания ** |
| 65 | Ошибка внутренней проверки компьютера ** |
| 70 | Неисправность на дополнительной плате DCU101 ** |
| 71 | Короткое замыкание на дополнительной плате DCU101: Слишком большой ток через двигатель 2 ** |
| 72 | Двигатель DCU101: Двигатель 2 неисправен ** |
| 75 | Устройство управления горячее DCU101: Температура устройства управления выше 110 °C ** |
| 77 | Термопара DCU101: Неисправна термопара устройства управления ** |
| 78 | Устройство управления перегрето DCU101: Температура двигателя или устройства управления выше 115 °C ** |
| 79 | Реле двигателя DCU101: Реле двигателя на дополнительной плате неисправно ** |
| 90 | Устройство управления неисправно |
| 91 | Сельсин-датчик, двигатель: Нет сигнала от сельсин-датчика |
| X.X | Позиция створки неизвестна (точка на левом дисплее) |
| XX. | Требования к техобслуживанию (число циклов, часы эксплуатации) (точка на правом дисплее) |
| EL | Ошибка при обучении устройства управления |
| 8.8 | Нет связи между устройством управления и дисплейным программным переключателем |
Источник: Инструкция по монтажу и техобслуживанию.
Содержание
- 1 Виды синхронной связи
- 1.1 Синхронное вращение
- 1.2 Синхронный поворот
- 2 Системы синхронного поворота: основные режимы
- 2.1 Индикаторный
- 2.2 Трансформаторный
- 3 Конструкция
- 3.1 Контактные
- 3.2 Бесконтактные
- 4 Видео по теме
Реализация технологического процесса предполагает использование различного оборудования. В некоторых случаях надо добиться синхронного и синфазного вращения осей различных устройств. Иногда по каким-то причинам механическое соединение не представляется возможным. Тогда вместо муфты используют сельсин — специальный датчик, благодаря которому можно добиться требуемой синхронизации. Он нередко входит в состав специальных систем, нуждающихся в повороте на некоторый угол на расстоянии. Сельсин работает в режиме приемника и передающего элемента. Стоит детально разобраться, что это такое, как работает и где может использоваться.

Виды синхронной связи
Прежде чем начать разбираться, что такое и как функционируют сельсины, стоит познакомиться с существующими разновидностями синхронной связи. По данному параметру системы принято делить на системы асинхронного вращения и поворота. Каждая разновидность имеет свои особенности.

Синхронное вращение
В состав входит два одинаковых асинхронных электродвигателя, оснащенных фазными роторами. Обмотки ротора соединяют. Статор подключают к 380 В.

Синхронный поворот
В состав входят сельсины, исполнение которых допускает самосинхронизацию. В зависимости от числа фаз они подразделяются на:
- Трехфазные, чья конструкция полностью соответствует асинхронным двигателям. Область использования таких устройств ограничена из-за наличия разницы между моментами синхронизации при повороте ротора;
- Однофазные, близкие по конструктивному исполнению к машинам синхронного типа с минимальной мощностью. Обмотка возбуждения подобного оборудования работает только при пропускании переменного тока.

Посмотрите видео в конце, чтобы разобраться в особенностях подобной системы.
Системы синхронного поворота: основные режимы
Сельсины работают в двух режимах. Каждый из них имеет свои особенности которые надо обязательно учитывать при выборе оборудования.
Индикаторный
Если оборудование работает в данном режиме, значит, ротор принимающего устройства подсоединен к ведомой оси. Схема актуальна при выборе для ведомой оси минимального момента торможения и размещение на ней индикаторной стрелки. Обмотки возбуждения подключают к общей цепи. Синхронизирующие объединяют с линией связи.
Формируемые магнитные потоки инициируют возникновение ЭДС на обмотках всех фаз. Незначительная рассогласованность приводит к протеканию электротока. Благодаря потоку в датчиках и принимающем элементе сельсина образуются разнонаправленные моменты. С их помощью удается полностью нивелировать угол рассогласования.

Ротор, располагающийся на датчике, затормаживают. Как итог, момент синхронизации влияет на механизм, поворачивающий ведущую ось. Благодаря подобному конструктивному исполнению удается обеспечить одновременный поворот на одинаковый угол роторов обоих подключенных элементов.
Трансформаторный
Электросигнал, появляющийся при рассогласованности роторов, сначала поступает на усиливающую часть схемы. Далее — на ротор исполнительного механизма. Последний начинает поворачивать ротор принимающего элемента и ведомую ось до полного нивелирования имеющейся разницы. Подобный режим актуален при прикладывании к ведомой оси момента торможения, имеющий достаточно большую величину. То есть помогает повернуть механизм.
Обмотку датчика соединяют с ведущей осью и подключают к электросети на 220 В. Для подачи напряжения на элемент, отмечающий за управление двигателем, задействуют усилитель. Обмотку приемника используют для присоединения сельсина. Для объединения обмоток синхронизации двух сельсинов используется линия связи. В возбуждающей обмотке индуцируется ток, создающий в синхронизирующей обмотке ЭДС.

Ток протекает по обоим элементам, так как их обмотки соединены. В принимающем элементе формируются магнитные импульсы. Если элементы рассогласованы, под действием потока в обмотке возникает ЭДС. На входе появляется напряжение, запускающее специальный усиливающий элемент. От него напряжение поступает на статор, принадлежащий исполнительному устройству. Это приводит к тому, что ведомая ось начинает поворачиваться следом за ротором приемника. По мере устранения имеющейся разницы, напряжение становится равным нулю, и вращение ведомой оси прекращается.
Особенности используемой технологии и конструкция влияют на величину погрешности. К таковым относят:
- Разность между параметрами датчика и принимающего устройства;
- Неравномерные показатели магнитной проводимости;
- Отсутствие симметричности у обмоток.
При передаче угла неизбежно возникают погрешности. Их появление обусловлено определенными условиями эксплуатации. При изменении величины сопротивления в сети управления, порядок работы сельсинов изменится.
Конструкция
Исполнение сельсинов диктует их принцип действия. Принято выделять:
- контактные, у которых для соединения обмотки ротора и внешней цепи используются щетки и контактные кольца;
- бесконтактные, в составе которых нет контактных элементов.
Каждая разновидность имеет свои отличительные особенности, с которым стоит обязательно ознакомиться, чтобы понять принцип работы.
Контактные
Контактные по своему исполнению аналогичны асинхронным электродвигателям с фазным ротором и малой мощностью. В их состав входят неявнополюсные ротор и статор. Благодаря этому обе обмотки – распределенные. У ротора предусмотрена обмотка возбуждения. Для подвода электротока используются два кольца.

У отдельных моделей уже имеется статор и ротор. Это их явное преимущество. В результате величина момента синхронизации возрастает. Однако контактные элементы в этом случае — явный недостаток.
Бесконтактные
Для их включения не нужны никакие контактные элементы. Обе обмотки изначально устанавливаются на статоре. Ротор имеет характерную цилиндрическую форму. Для его изготовления используется материал, имеющие ферримагнитные свойства. Алюминиевая прослойка делит роток на два полюса.
Торообразные сердечники располагаются на торцах сельсинов. Их внутренняя часть располагается над ротором. Наружная соединяется со стержнями внешнего магнитопровода. Для изготовления сердечников используется электротехническая листовая стали. Однофазная обмотка устройства состоит из двух дисковых катушек, располагающихся по обеим сторона статора между сердечниками и обмоткой синхронизации.

В процессе работы устройства происходит замыкание магнитного потока импульсного типа. Трехфазная синхронизирующая обмотка соединяется на статоре. Положение оси потока магнитной индукции по мере изменения пространственного положения ротора изменяется. Он занимает иное положение относительно синхронизирующих обмоток. Величина возникающей ЭДС напрямую зависит от величины угла, на который смог повернуться ротор.
К недостаткам подобных устройств является не такое эффективное использование активных материалов. Кроме того, они в среднем на 50% тяжелее контактных аналогов, что обусловлено большими воздушными зазорами. Благодаря последним, величина токов намагничивания возрастает.
Видео по теме
Сельсины и вращающиеся трансформаторы как датчики угла и рассогласования
В автоматизированном электроприводе сельсины и вращающиеся трансформаторы используются как датчики угла и рассогласования. Датчик угла преобразует угловую координату в напряжение, которое определяет сигнал обратной связи по углу перемещения объекта или сигнал управления в задающих устройствах. Датчик угла рассогласования образуется двумя датчиками угла, один из которых является командным, а другой – исполнительным. Задание на движение системы может выполняться с помощью датчика угла рассогласования, угловой координатой которого является угол поворота командной оси. Разность сигналов между командной и исполнительной осью используется как сигнал управления системой.
Сельсин представляет собой маломощную машину переменного тока с однофазной обмоткой возбуждения и трехфазной обмоткой синхронизации. Конструктивно выделяются контактные и бесконтактные сельсины. Основное исполнение первых – обмотка возбуждения расположена на роторе, а обмотка синхронизации – на статоре. Этим достигается уменьшение числа контактных колец до двух и исключаются контакты на синхронизирующей связи. Бесконтактные сельсины реализуются двумя способами. При первом способе благодаря специальной конструкции магнитопровода ротора неподвижная кольцевая обмотка возбуждения создает в роторе поток, поворачивающийся вместе с ротором. При втором – обмотка ротора получает питание от вращающейся совместно с ротором вторичной обмотки кольцевого трансформатора возбуждения с неподвижной первичной обмоткой.
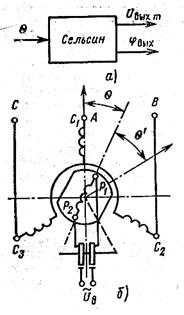
Рисунок 38 – Координаты (а) и схема (б) сельсина
В схемах датчиков угла входная координата сельсина – угол поворота его ротора q, а выходная координата – амплитуда Uвых..m или фаза j выходного напряжения (рис.4) по отношению к опорному напряжению.
В амплитудном режиме Uвых..m = f(q) обмотка возбуждения получает питание от сети переменного тока. Тогда напряжение обмотки возбуждения Uв равно по отношению к амплитудному Uв..m:
 . (38)
. (38)
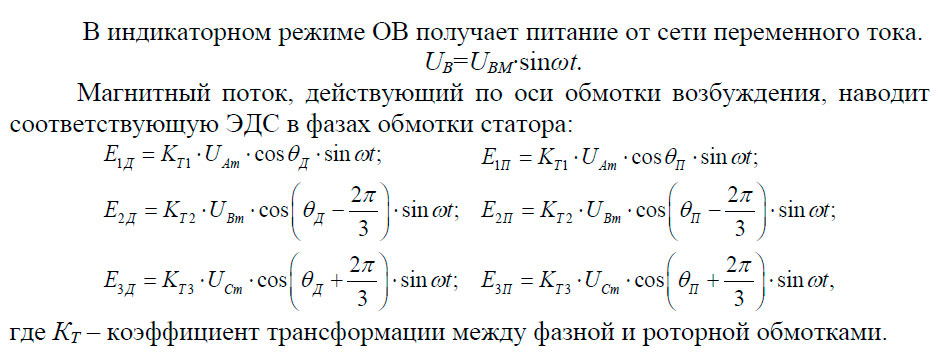
Магнитный поток, действующий по осевой линии обмотки возбуждения, наводит фазные ЭДС «е» в обмотке статора (рисунок 38б):
 ,
,
 ,
,
 ,
,
где kт – коэффициент трансформации между фазной статорной и роторной обмотками при их соосном положении.
Характеристика управления сельсина в амплитудном режиме после преобразований и предварительном повороте сельсина на 90 0 имеет вид:

 , (39)
, (39)
В режиме фазовращателя характеристика управления имеет вид: j = q.
Основные характеристики сельсина как датчика и приемника:
 ;
;  ;
;  ;
;  ;
;  , (40)
, (40)
где Мст – статический вращающий момент сельсина; mуд – удельный синхронизирующий момент; mтр – момент трения; mр – реактивный момент сельсина вследствие магнитной и электрической асимметрии сельсинов датчика и приемника; qст – статическая ошибка; А – добротность сельсина.
При выборе параметров сельсинов важными факторами являются напряжение возбуждения (до 110 в), частота питающей сети, класс точности. Максимальная погрешность сельсинов-приемников составляет: в классе точности 1 — ± 0,75; в классе точности 2 — ±0,75…±1,5; в классе точности 3 — ±1,5 …±2,5. Для сельсинов-датчиков в этих же классах точности: ±25; ±25…±0,5; ±0,5…±1,0.
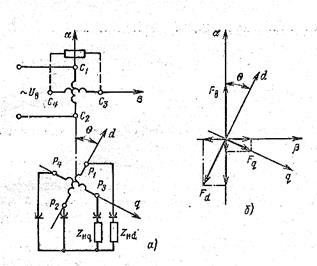
Рисунок 39 – Схема (а) и векторная диаграмма (б) СКВТ
Для увеличения точности углового датчика на базе сельсина разработаны синусно-косинусные вращающиеся трансформаторы (СКВТ). На статоре и роторе СКВТ расположены по две обмотки. На неявнополюсном статоре – обмотка возбуждения по продольной оси и квадратурная обмотка управления по поперечной оси. На роторе – синусная и косинусная обмотки. Обмотка возбуждения питается от однофазной сети и организует пульсирующий магнитный поток, пронизывающий обмотки ротора.
В амплитудном режиме для косинусной обмотки, расположенной по оси d, и синусной – по оси q имеем:
 ,
,  , (41)
, (41)
В режиме фазовращателя обмотки статора получают питание от источника двухфазного напряжения. Образующееся при этом круговое поле наводит ЭДС в обмотке ротора, фаза которой линейно изменяется при повороте ротора. Характеристика управления в режиме фазовращателя имеет вид: j = q ¢ , где q ¢ = q + p/4. Максимальные угловые погрешности СКВТ от нулевого до третьего классов точности составляют от 4 до 22 минут.
Два сельсина или СКВТ образуют датчик угла рассогласования. При разных схемах соединения сельсинов или СКВТ можно получить индикаторный, трансформаторный или дифференциальный режим датчиков. Область использования – следящие системы.
В индикаторном режиме характеристика управления определяется разностью углов датчика и приемника с учетом статической ошибки сельсинов или СКВТ:
Индексы «дт» и «пр» соответствуют датчику и приемнику.
В трансформаторном режиме:
 , (42)
, (42)
где kдп – коэффициент, зависящий от параметров обмоток датчика и приемника; Uу – напряжение управления, полученное на выходе обмотки возбуждения сельсина-приемника или на квадратурной обмотке приемника СКВТ.
В дифференциальном режиме используются два датчика и один приемник. Приемник отрабатывает разность углов датчиков с учетом знака угла и организует угловую координату для функции управления:
где qпр.д – угол поворота дифференциального приемника; qсд1 и qсд2 – углы поворота первого и второго датчиков.
Датчики скорости
В автоматизированном электроприводе датчики скорости используются для преобразования скорости двигателя или скорости движения рабочего органа механизма в электрический сигнал для организации обратной связи по скорости. В качестве аналоговых датчиков скорости применяются тахогенераторы постоянного и переменного тока.
Тахогенератор постоянного тока представляет собой микромашину постоянного тока с независимым возбуждением или постоянными магнитами, входной координатой которого является угловая скорость w, а выходной – напряжение Uвых, выделяемое на сопротивлении нагрузки.
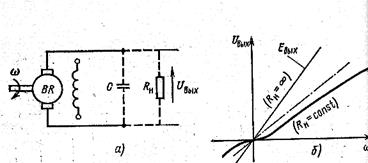
Рисунок 40 – Схема (а) и характеристика управления (б) тахогенератора постоянного тока
 , (44)
, (44)
где Ф – магнитный поток возбуждения; k – конструктивная постоянная; kтг – передаточный коэффициент тахогенератора; Rтг – сопротивление якорной обмотки и щеточного контакта тахогенератора; Rн – сопротивление нагрузки.
Характеристика управления нелинейная в области малых и больших скоростей. В первом случае для уменьшения нелинейности используют металлизированные щетки, во втором – ограничивают скорость сверху и увеличивают сопротивление нагрузки. Тахогенераторы высокой точности выполняются с полым беспазным якорем и дополнительно к выходу генератора подключают конденсатор, выполняющий роль фильтра «С». Передаточная функция при этом имеет вид
 , (45)
, (45)
где Тф – постоянная времени фильтра.
 , (46)
, (46)
Тахогенераторы переменного тока выполнены на базе асинхронной двухфазной машины (рисунок 41).
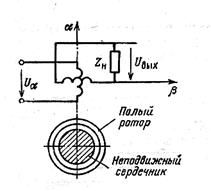
Рисунок 41 – Тахогенератор переменного тока
На статоре имеются две взаимно перпендикулярные обмотки: обмотка возбуждения, расположенная по оси a, и выходная обмотка управления, расположенная по оси b. Последняя включена на сопротивление нагрузки тахогенератора. Для уменьшения момента инерции ротор выполняется тонкостенным в виде полого стакана из немагнитного материала. Внутри ротора размещается неподвижный стальной шихтованный сердечник, по которому замыкается магнитный поток.
Амплитудные значение ЭДС и передаточного коэффициента ТГ:
 . (47)
. (47)
 , (48)
, (48)  ,
,
где  ;
;  – приведённое к обмотке статора сопротивление ротора;
– приведённое к обмотке статора сопротивление ротора;  — индуктивное сопротивление намагничивания; Rc и хc – активное и индуктивное сопротивление рассеяния обмотки статора;
— индуктивное сопротивление намагничивания; Rc и хc – активное и индуктивное сопротивление рассеяния обмотки статора;
ω* = ω/ ωс – относительная скорость ротора; ω – изменяемое значение скорости; ωс – синхронная скорость ротора.
Рисунок 42 – Характеристики управления тахогенератора переменного тока
Асинхронные тахогенераторы имеет достаточно высокую точность. Линейность характеристик определяется погрешностью менее 0,5%. По сравнению с тахогенераторами постоянного тока обладает существенно меньшим передаточным коэффициентом.
Существенными преимуществами в точности по сравнению с аналоговыми имеют цифровые датчики скорости.
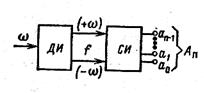
Рисунок 43 – Структурная схема цифрового датчика скорости
Структурно в датчике выделяются две части: датчик импульсов ДИ и счетчик импульсов СИ. ДИ является импульсным преобразователем и преобразует угловую скорость вала в импульсы с частотой f, пропорциональной скорости. Задача кодового преобразователя СИ как счетчика импульсов формировать на интервале измерения Т цифровой код Аn выходной величины датчика скорости.
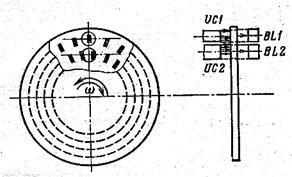
Рисунок 44 – Кодовый диск фотоэлектрического датчика импульсов
ДИ выполняется на основе фотоэлектрического кодового диска (рисунке 43) и вырабатывает две серии импульсов, сдвинутых по фазе на 90 0 , которые используются для определения величины и знака угловой скорости. На двух дорожках расположены пропускающие свет щели. Свет от источников ИС1 и ИС2 через щели попадает на фотодиоды BL1 и BL2, которые при этом открыты и пропускают ток. Когда щель выходит из луча света, фотодиоды запирают цепь. При вращении диска с угловой скоростью w фотодиоды дают чередование максимального и минимального сигналов с частотой
 , (49)
, (49)
где Nди – импульсная емкость кодового диска (число импульсов на один оборот диска).
Среднее значение скорости определяется числом импульсов N на периоде измерения T:
 . (50)
. (50)
Точность цифрового датчика увеличивается с увеличением измеряемой скорости и периода измерения.
Источник
Сельсинные датчики. Сельсинные датчики (сельсины, работающие в трансформаторном режиме) применяются для измерения угла рассогласования двух осей




![]()
![]()
Сельсинные датчики (сельсины, работающие в трансформаторном режиме) применяются для измерения угла рассогласования двух осей.
 Сельсин по конструкции напоминает трехфазный синхронный генератор. На роторе у него располагается однофазная обмотка с контактными кольцами и щетками, а на статоре — трехфазная либо наоборот. Есть также бесконтактные сельсины, v которых обе обмотки располагаются на статоре, а магнитопровод ротора имеет специальную конструкцию.
Сельсин по конструкции напоминает трехфазный синхронный генератор. На роторе у него располагается однофазная обмотка с контактными кольцами и щетками, а на статоре — трехфазная либо наоборот. Есть также бесконтактные сельсины, v которых обе обмотки располагаются на статоре, а магнитопровод ротора имеет специальную конструкцию.
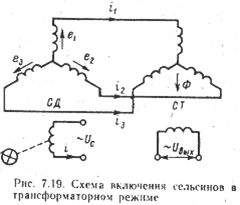
Схема включения сельсинов в трансформаторном режиме показана на рис. 7.19. Сельсин, у которого ось ротора механически связана с вращением контролируемого вала, называется сельсином-датчиком (СД). Однофазная обмотка СД подключается к сети переменного тока. Другой сельсин называется сельсином-трансформатором (СТ). С его однофазной обмотки снимается выходное напряжение. Ось ротора СТ механически соединяется с валом исполнительного элемента.
Под действием напряжения сети в однофазной обмотке СД создается ток i, который наводит в витках трехфазной обмотки электродвижущие силы е1, е2, е3. Эти ЭДС наводят токи i1, i2, i3 в фазах системы, которые создают в СТ магнитный поток Ф. Если ось однофазной обмотки СТ перпендикулярна магнитному потоку Ф, то потокосцепление с этой обмоткой равно нулю, ЭДС в ней не наводится и UBЫХ = 0.
Положение роторов сельсинов, при котором UBЫХ = 0, называется согласованным.
При повороте ротора СД от согласованного положения на угол θ изменяется взаимная индуктивность между одно- и трехфазной обмотками СД, изменяются амплитуды электродвижущих сил е1, е2, е3 и амплитуды токов i1, i2, i3,что приводит к повороту потока СТ. Возникает потокосцепление с витками однофазной обмотки С-Т, в ней наводится ЭДС, за счет которой появляется выходное напряжение с частотой питающей сети и с амплитудой Uвых = Uмаксsin θ, где Uмакс — максимальная амплитуда выходного напряжения; θ — угол рассогласования.
При повороте ротора СД в другую сторону от согласованного положения угол 8 будет отрицательным. При этом фаза Uвыхизменится на 180°. Таким образом, по амплитуде выходного напряжения можно определить величину θ, а по фазе — знак угла θ.
 При малых углах рассогласования можно считать Uвых = Kθ, где К — коэффициент передачи.
При малых углах рассогласования можно считать Uвых = Kθ, где К — коэффициент передачи.
Источник
Содержание
- Конструкция и принцип действия сельсина
- Индикаторный режим
- Трансформаторный режим
- Многократный режим включения
- Дифференциальный режим включения
Конструкция и принцип действия сельсина
Сельсинами называют электрические микромашины, обладающие способностью самосинхронизации и применяемые в индукционных системах синхронной связи в качестве датчиков и приемников. Слово «сельсин» происходит от английских слов self–synchronizing, что означает самосинхронизирующийся. Сельсин-передачи работают аналогично обычным механическим передачам, но в них крутящий момент между валами создаётся не при помощи непосредственно контактирующих шестерён, а посредством изменяющегося магнитного потока.
В системах автоматики и контроля часто возникает необходимость синхронного и синфазного вращения или поворота двух и более осей, механически не связанных друг с другом.
Сельсины применяются для различных целей:
- 1. Передача измерительной информации и команд на расстояние.
- 2. Синхронизации перемещения информации и команд на расстояние.
- 3. Измерения и визуального представления в цифровой форме линейных и угловых перемещений подвижных узлов станков и роботов.
- 4. Полуавтоматического управления исполнительными устройствами.
- 5. В качестве следящих систем.
Сельсины представляют собой индукционные электрические машины переменного тока. Статор и ротор сельсина выполняются в виде магнитопроводов специальной конструкции. Для уменьшения потерь они набираются из тонкой электротехнической стали. В пазах статора и ротора укладывается обмотка возбуждения (первичная обмотка) и обмотка
синхронизации (вторичная обмотка).
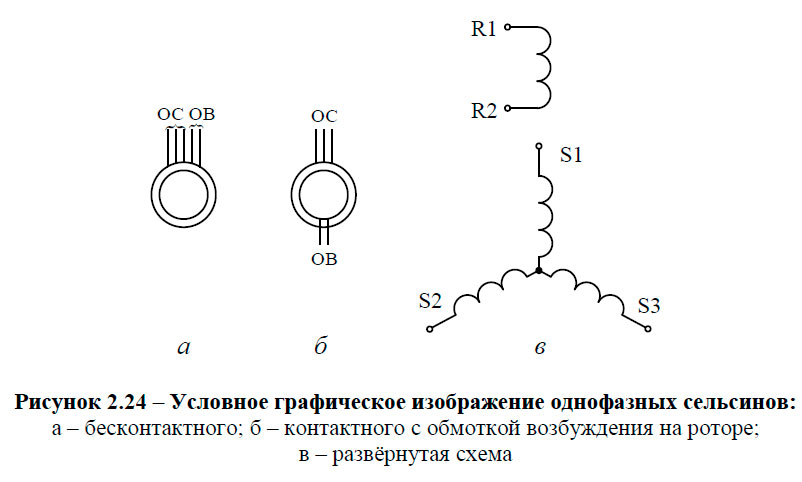
Условное графическое изображение и буквенное обозначение сельсинов на схемах показано на рисунке 2.24. Выводы обмотки синхронизации маркируют буквами S1, S2, S3, выводы обмотки возбуждения – буквами R1, R2. Буквенное обозначение сельсинов: BE – приёмник, ВС – датчик.
Сельсины подразделяются на две группы: трёхфазные силовые и однофазные.
Трёхфазные сельсины применяются в системах, где требуется обеспечить синфазное и синхронное вращение двух двигателей (валов), находящихся на расстоянии друг от друга. Трехфазный сельсин имеет трехфазную обмотку возбуждения и трехфазную обмотку синхронизации. Такие сельсины по конструкции не отличаются от обычных асинхронных двигателей и
применяются в основном при больших мощностях.
Однофазный сельсин содержит однофазную обмотку возбуждения (ОВ), трёхфазную обмотку синхронизации (ОС), магнитопровод, вал и конструктивные элементы. Сельсины бывают бесконтактными и контактными. В первых, обе обмотки расположены на статоре, во-вторых сельсинах – одна обмотка расположена на статоре, другая – на роторе. Обмотка синхронизации
распределена по пазам, обмотка возбуждения выполняется сосредоточенной в виде катушек на полюсах либо распределённой по пазам. В контактном сельсине электрическая связь с обмоткой, расположенной на роторе, осуществляется с помощью контактных колец и щёток. Принцип работы сельсина не зависит от места расположения каждой из обмоток: на статоре или на роторе. Однако наибольшее распространение получили сельсины с обмоткой возбуждения на роторе и обмоткой синхронизации на статоре (рисунок 1, б). У них меньше контактных колец и щеток, что обеспечивает более высокую надежность, меньший момент трения и объем сельсина. В цепи передачи сигнала (линии связи обмоток синхронизации) отсутствуют скользящие контакты. При такой конструкции проще выполнить демпферную обмотку на роторе.
Наличие скользящих контактов значительно снижает надежность контактных сельсинов. Бесконтактные сельсины подразделяются на:
- а) с униполярным возбуждением ротора со стороны статора;
- б) с переходным кольцевым трансформатором.
Недостатком бесконтактных сельсинов является худшее использование активных материалов. Их масса примерно в 1,5 раза больше, чем контактных. Объясняется это большими воздушными зазорами, вследствие чего сельсины имеют значительные потоки рассеяния и большие намагничивающие токи.
Преимущества:
- простота;
- надёжность;
- ремонтопригодность.
Недостатки:
- невысокая точность синхронизации, особенно когда на валу сельсина-приёмника действует существенный механический момент;
- относительно невысокая точность передачи угла, обусловленная погрешностями изготовления магнитопровода сельсина;
- колебание ротора, не имеющего нагрузочного момента сельсина с частотой питающего переменного тока.
Для повышения точности применяют пару сельсинов – «грубый» и «точный» (последний установлен через редуктор и за один оборот основного вала делает несколько оборотов). Если сигнал с грубого сельсина слабее некоторого порога, автоматика передаёт в линию связи сигнал с точного сельсина. Для подавления колебаний ротора, не имеющего нагрузочного момента используются механические демпферы.
Однофазные сельсины могут работать в двух режимах: индикаторном и трансформаторном.
Индикаторный режим
Сельсин–датчик принудительно поворачивается на определённый угол, а сельсин-приёмник устанавливается в соответствующее ему положение (рисунок 2.25). Индикаторная схема применяется для синхронной дистанционной передачи угла поворота и различных величин, предварительно преобразованных в угловое перемещение, когда на выходе нет значительного крутящего момента.
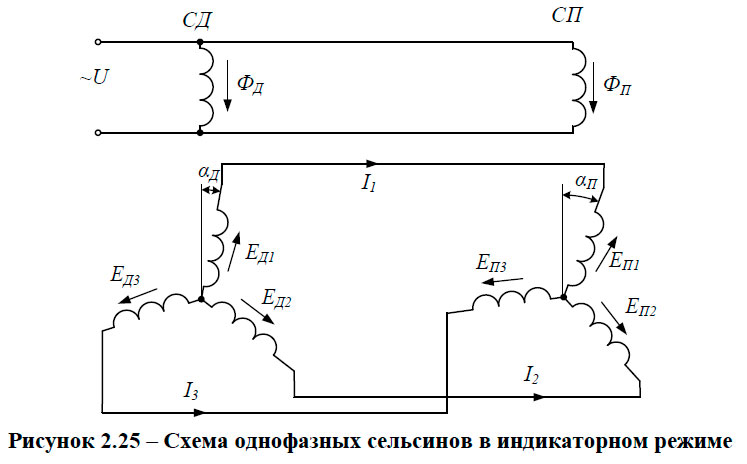
Если ротор сельсина-датчика вывести из согласованного положения и зафиксировать (затормозить), то угол рассогласования Δα = αД – αП будет отличным от нуля. В этом случае в обмотках синхронизации и линий связи потекут уравнительные токи Ii, так как ΔEi ≠0.

где ZФ – полное сопротивление фазной обмотки сельсина.
При взаимодействии магнитных потоков, создаваемых уравнительными токами, с потоком возбуждения ФД и ФП на валах роторов сельсина-датчика и сельсина-приемника возникают синхронизирующие моменты, которые стремятся повернуть роторы в согласованное положение. Так как ротор сельсин-приемник не заторможен, то под действием вращающего момента он придет в согласование (синфазное) положение с ротором сельсина-датчика, т.е. положение, когда Δα=αД–αП=0.
Величина момента, поворачивающего ротор сельсина-приемника, является функцией угла рассогласования:
где ММ – максимальный момент сельсина, определяемый его параметрами.
Моментно-угловая зависимость является статической характеристикой сельсинной пары, работающей в индикаторном режиме.
В индикаторном режиме передача угла происходит со статической угловой погрешностью. При работе без нагрузки погрешность, вызванная собственным моментом трения МТ сельсина-приемника, является основной и характеризует величину зоны нечувствительности приемника, в пределах которой ротор приемника может занять любое положение при одном и том же положении датчика.
В процессе эксплуатации на точность передачи влияют колебания напряжения и частоты питающей сети и сопротивление линии связи сельсинов. Уменьшение напряжения и увеличение частоты приводят к уменьшению потока возбуждения Ф. Увеличение расстояния между сельсинами и сопротивления линии связи снижает величину тока в обмотках синхронизации и МДС Fmax. В обоих случаях уменьшается синхронизирующий момент и точность передачи. Резкое снижение точности передачи наступает при появлении момента нагрузки на валу приемника.
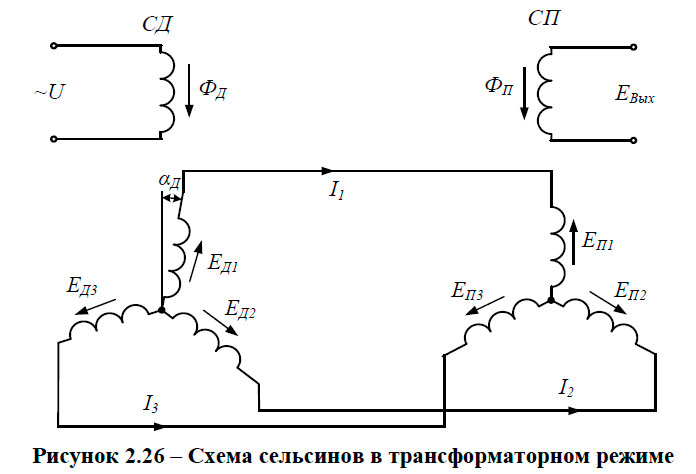
Трансформаторный режим
Сельсин-датчик принудительно поворачивается на определённый угол, а на выходе сельсин-приёмника формируется напряжение, являющееся функцией угла рассогласования между ними (рисунок 2.26). Трансформаторная схема синхронной передачи угла применяется тогда, когда на ведомой оси имеется значительный момент сопротивления.
Обмотка возбуждения сельсина-датчика, как и в случае индикаторного режима, подключена к питающей сети и служит для создания в магнитной системе машины пульсирующего магнитного потока. Обмотки синхронизации датчика и приемника соединены между собой линия связи. Обмотка возбуждения сельсина-приемника предназначена для выработки сигнала
(напряжения), зависящего от угла рассогласования. В исходном положении ротора СД ось обмотки 1 совпадает с осью обмотки возбуждения ОВ, в которой наводится максимальная э.д.с. При повороте ротора СД обмотки 1,2 и 3 смещаются. Эти токи создают в сельсине–приемнике магнитный поток, направленный под углом Δα=αД–αП к продольной оси выходной однофазной обмотки. В выходной обмотке наводится ЭДС, которая является выходным сигналом сельсинной пары:
где Uм – максимальное значение напряжения, наводимого в ОВ.
При этом по линии связи передается незначительный по мощности сигнал, затем сигнал усиливается, приводит во вращение исполнительный двигатель, который, перемещая объект управления, одновременно уменьшает угол рассогласования между сельсином-датчиком и сельсином-приемником.
Уменьшение максимально допустимых погрешностей сельсинов в трансформаторном режиме по сравнению с индикаторным объясняется тем, что точность работы сельсинов в трансформаторном режиме определяется только их магнитной и электрической симметрией, а не величиной паразитных моментов на валу.
Для обоих режимов существуют схемы включения:
- парная (датчик и приёмник);
- многократная (датчик и несколько приёмников);
- дифференциальная (два датчика и приёмник).
Многократный режим включения
Иногда требуется передать на расстояние угловую величину не в одно, а в несколько мест. Например, когда положение какого-либо регулирующего органа необходимо передать на главный пульт управления и местные наладочные пульты и т.д. Тогда к одному датчику подключают несколько сельсинов–приемников. Такой режим называют многократным приемом (рисунок 2.27).
Пусть к датчику подключено n однотипных с ним приемников. Синхронизирующий момент пропорционален МДС Fmax, последняя в свою очередь пропорциональна току обмотки синхронизации Imах. Так как приемники подключены к датчику параллельно, синхронизирующий момент приемника будет в n раз меньше момента датчика, поскольку
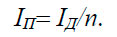
В силу снижения моментов у сельсинов-приемников точность передачи будет значительно снижена.
Для того чтобы сохранить синхронизирующий момент приемников, выбирают сельсин-датчик в n раз мощнее сельсинов–приемников, т.е. сопротивление его обмотки синхронизации будет в n раз меньше сопротивления обмотки синхронизации каждого сельсина-приемника.
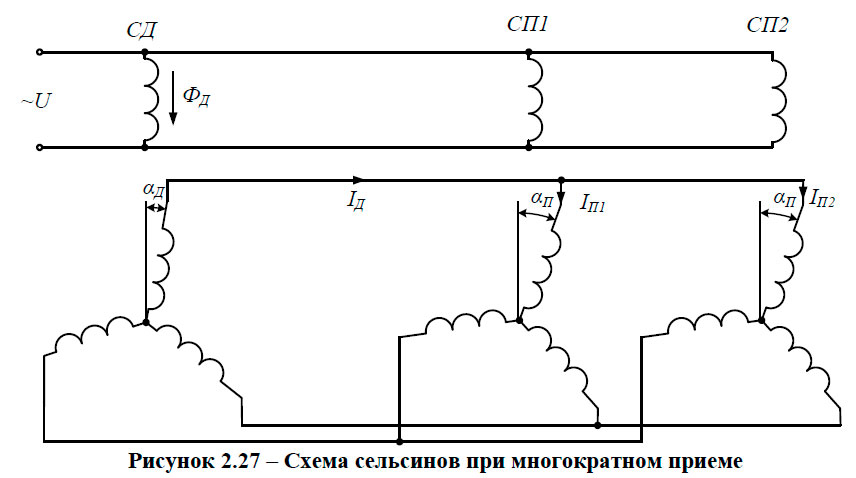
Дифференциальный режим включения
В системах дистанционной передачи угла применяются дифференциальные сельсины, назначение которых – воспроизводить угол поворота, равный сумме или разности углов, заданных двумя сельсинами-датчиками. Дифференциальный сельсин имеет две трехфазные обмотки, одна из которых расположена в пазах неявнополюсного статора, а другая – в пазах
неявнополюсного ротора. Вывод обмотки ротора для подключения к внешней сети осуществлен посредством трех контактных колец и щеток. Рассмотрим
принцип работы индикаторной системы дистанционной передачи угла, содержащей два сельсина-датчика СД1 и СД2, и один дифференциальный сельсин приемник СП–СД (рисунок 2.28). Допустим, что ротор дифференциального сельсина заторможен. При включении в сеть переменного тока обмоток возбуждения сельсинов-датчиков СД1 и СД2 создаются пульсирующие магнитные потоки ФВ1 и ФВ2. Поток ФВ1 наводит в обмотках фазы синхронизации датчика СД1 электродвижущие силы, под действием которых в цепи синхронизации этого сельсина появятся токи. Проходя по обмотке синхронизации дифференциального сельсина, эти токи создают МДС FДС1. При повороте ротора датчика СД1 на угол αД1 по часовой стрелке вектор МДС FДС1 повернется на такой же угол, но против часовой стрелки. Аналогичные процессы происходят и в цепи синхронизации обмоток датчика СД2 и дифференциального сельсина: при повороте ротора датчика СД2 на угол αД2 по часовой стрелке вектор МДС FДС2 обмотки ротора дифференциального сельсина также
повернется на угол αД2, но против часовой стрелки. В итоге между векторами МДС FДС1 и FДС2 дифференциального сельсина появится пространственный угол, равный разности углов, заданных датчиками СД1 и СД2.
В результате взаимодействия МДС FДС1 и FДС2 на роторе дифференциального сельсина возникает вращающий момент МД. Поэтому, если растормозить ротор дифференциального сельсина СП–ДС, то под действием момента МД ротор повернется на угол β так, чтобы векторы МДС FДС1 и FДС2 совпали по направлению и создали в магнитной системе дифференциального сельсина результирующий магнитный поток. Если роторы датчиков СД1 и СД2
повернуть на углы αД1 и αД2 в разные стороны, то ротором дифференциального сельсина будет воспроизведен угол поворота, равный разности заданных углов.
Особенностью работы индикаторных систем с дифференциальными сельсинами является протекание токов в цепях синхронизации после отработки дифференциальным сельсином заданных углов, т.е. в согласованном состоянии.
Литература
Элементы и функциональные устройства судовой автоматики — Авдеев Б.А. [2018]