Содержание
- Problem with «RobotModel» in Rviz #38
- Comments
- Turtlebot 3 Rviz No transform from [wheel_left_link] to [base_footprint] #246
- Comments
- Robot model status error
- Robot model is not displayed when loading a urdf file using the moveit setup assistant #786
- Comments
- Description
- Your environment
- Robot model status error
- Closed for the following reason the question is answered, right answer was accepted by SL Remy close date 2017-07-21 02:01:02.598658
- 8 Answers
Problem with «RobotModel» in Rviz #38
I just execute the examples in your tutorial without any change. But all examples, except the 1st one, have such a problem «no transform from [] to []» as shown in the following figure. 
However, when I add «RobotState», it is alright, like this. 
So could you help me solve the above problem?
The text was updated successfully, but these errors were encountered:
The provided rviz configuration uses /base_link as the root frame, rather than /map which is the default. If you change the global fixed frame to base_link it will resemble the RobotState.
The global fixed frame was just /base_link. The «StateModel» had many «transform» errors 
Seems like you might be out of sync with the different steps of the tutorial, as if robot_state_publisher was seeing the previous version of the URDF. It doesn’t automatically reload when the parameter changes.
Hmmm i am having a very similar issue, where i get an transform error on a seemingly correct urdf (meaning e.g. i have a first link, then a follow_up joint which specifies the child link of that fist link and the chain continues like this). Now I expected that, when the first link is published to rviz, that then the chain would be processed, and therefore all links displayed. However this is the output:

The loaded launchfile loads the robot model like this:
I would expect these lines of code to load the .urdf description (which is correctly written, copied out of the tutorial) and publish the joints to /joint_states from where it goes to /tf and results in the display of the links.
I am pretty new to this so maybe i got something wrong. I can only tell that the joints never arrive at /tf or /tf_static, so i am guessing that something is missing, but i don’t know what and can’t seem to find anything.
Источник
Turtlebot 3 Rviz No transform from [wheel_left_link] to [base_footprint] #246
ISSUE TEMPLATE ver. 0.1.0
Which TurtleBot3 you have?
Which SBC(Single Board Computer) is working on TurtleBot3?
- Raspberry Pi 3
- Intel Joule 570x
- etc (PLEASE, WRITE DOWN YOUR SBC HERE)
Which OS you installed in SBC?
- Ubuntu MATE 16.04 or later
- Raspbian
- etc (PLEASE, WRITE DOWN YOUR OS)
Which OS you installed in Remote PC?
- Ubuntu 16.04 LTS (Xenial Xerus)
- Ubuntu 18.04 LTS (Bionic Beaver)
- Linux Mint 18.x
- etc (PLEASE, WRITE DOWN YOUR OS)
Write down software version and firmware version
- Software version: [1.12.13]
- Firmware version: [1.2.0]
Write down the commands you used in order
[Remote PC] roscore
[SBC] roslaunch turtlebot3_bringup turtlebot3_robot.launch
[Remote PC] $ export TURTLEBOT3_MODEL=burger
[Remote PC] $ roslaunch turtlebot3_bringup turtlebot3_remote.launch
[Remote PC]$ rosrun rviz rviz -d rospack find turtlebot3_description /rviz/model.rviz
Copy and Paste your error message on terminal

- Please, describe detailedly what difficulty you are in
Hi,
I am using a turtlebot 3 burger with ubuntu mate installed on the raspberry pi and the remote PC is running Ubuntu 16.04 ( Xenial Xerus )
I was working on the ‘bringup’ section of the tutorial and while running rviz, I got the following status error in the robot model section.
No transform from [wheel_left_link] to [base_footprint]
No transform from [wheel_right_link] to [base_footprint]
I have updated the firmware on the openCR board to the latest version (1.2.0)
The text was updated successfully, but these errors were encountered:
Источник
Robot model status error
First time here? Check out the FAQ!
Including panda_control_moveit_rviz.launch in my own launch file which also launches a process which moves the robot results in
This error is completely ignored and the process seems to run fine except for an update issue with the hand of the robot (possibly even unrelated).
Upon further investigation, this seems to stem from launch order, in the sense that running the other nodes separately beforehand and launching my own move-the-robot node after the others (rviz included) are initialized, avoids the message entirely.
Since roslaunch doesn’t guarantee startup order I sought out to find which service/topic/other to wait on for before starting my own node, as I was doing in another case for planning scene service get_planning_scene , but:
- I wanted to add a breakpoint at the incomingDisplayTrajectory call with gdb but I couldn’t find some package like ros-kinetic-rviz-dbg as per this to have debug symbols, so that didn’t work;
- I couldn’t find anything from exploring the RViz source code: I worked my way from the top to the likely path that leads to the message, found out it needs robot_loaded_ true in robot.h and from there went to RobotModelDisplay but in the end couldn’t solve the issue.
In the end I would only like to find out what I should wait for, but it would be nice to know if the only way to set the breakpoint I wanted to would have been to get rviz from source and recompile it myself.
UPDATE 1: 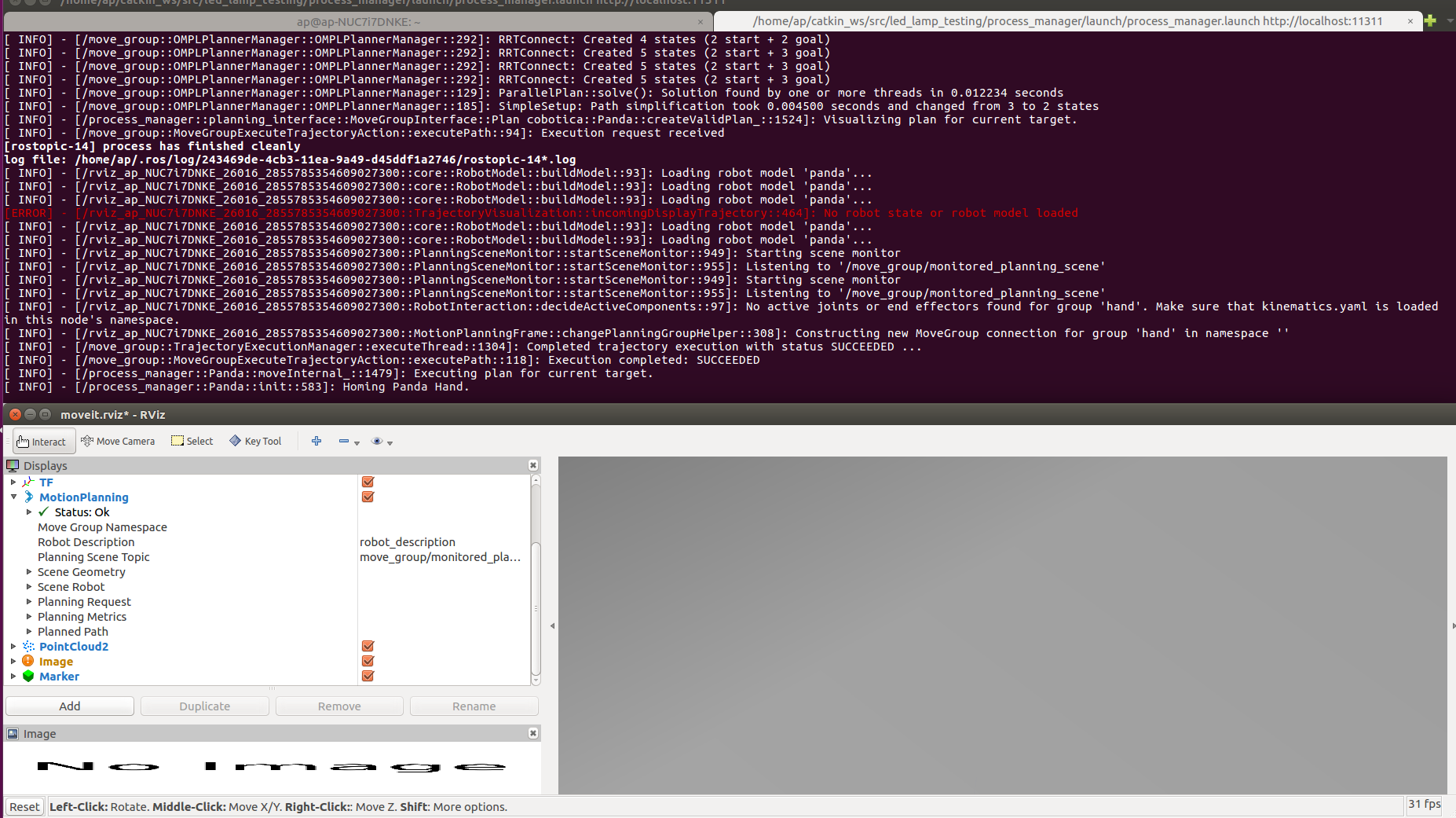
UPDATE 2: I have both robot_state_ and robot_mndel_ empty.
This, combined with the 5 calls printing «Loading robot model ‘panda’. » is somewhat suspicious.
Источник
Robot model is not displayed when loading a urdf file using the moveit setup assistant #786
Description
I tried loading the urdf (xacro format) file from my robot. It shows the loading was successful, but I do not see the rviz model of the robot in the viewing window (right side stays black).
I first tested by installing ros-indigo-moveit, then I remembered that I was able to load that same model in the moveit setup assistant in May 2017. I therefore removed ros-indigo-moveit, and cloned this moveit source repo. Then I tried to checkout to some commits along the way, and I could identify that commit e9e069d https://github.com/ros-planning/moveit/commit/e9e069d3b98e576edd4f127ead2d558150eb9894 was where the issue was introduced.
Is it possible to revert some changes that were made in this commit? Or else, what’s the trick to load the urdf model and get the rviz visualisation working?
Thanks a lot
Martine
Overview of your issue here.
Your environment
- ROS Distro: Indigo
- OS Version: e.g. Ubuntu 14.04
- Source or Binary build? both source and binary built version tried
The text was updated successfully, but these errors were encountered:
I had a similar problem, although with Rviz not being able to display the model despite loading the robot model successfully to the parameter server. Turned out, the issue was the locale setting, because I used a non-English locale setting. I am not sure if this is also the case with you.
If you type echo $LC_NUMERIC in the terminal and if it returns anything other than en_US.UTF-8, then that could be a problem. You can change that by export LC_NUMERIC=en_US.UTF-8 .
thanks @mbharatheesha for the suggestion. did not work for me though . did export LC_NUMERIC=en_US.UTF-8, then tried loading my robot model with the latest binary built version of moveit I could get (got it from apt-get install ros-indigo-moveit) and I still have the same issue
Hi,
@martine1406 did you solve your problem? I also have the same issue with setup assistant.
I did not push the investigation further unfortunately. Let me know if you find any solution.
@v4hn Do you also observe these issues in Indigo?
I’m having the same issue. The fix above didn’t work for me.:-/
Can you please provide more details:
- Which MoveIt version you are running? Which robot model do you want to load?
- Please, try to load a default model provided with MoveIt: roslaunch moveit_resources demo.launch
If this works (i.e. shows a robot in rviz), it’s probably an issue with your robot description. - Does rviz’ RobotModel display work?
- Are there any errors reported on the console?
okay we are getting to something
Which MoveIt version you are running? Which robot model do you want to load?
Well I use the binary install I get when doing ‘sudo apt-get install ros-indigo-moveit’, so I expect the latest available moveit version for ros Indigo? After doing ‘sudo apt-get install ros-indigo-moveit’, I got installation message such as Setting up ros-indigo-moveit (0.7.13-0trusty-20180326-123655-0800)
other than that:
Please, try to load a default model provided with MoveIt: roslaunch moveit_resources demo.launch
If this works (i.e. shows a robot in rviz), it’s probably an issue with your robot description.
roslaunch moveit_resources demo.launch works. However, if I try to launch the moveit_setup_assistant, then create a new moveit configuration package, then load the fanuc robot urdf file (part of moveit_resources, on my computer located here: /opt/ros/indigo/share/moveit_resources/fanuc_description/urdf), it does the same result as for the jaco2 robot.
Does rviz’ RobotModel display work?
when I roslaunch the moveit_setup_assistant, then load the urdf model of the robot I want to work with, then open Rviz, the rviz’ RobotModel display work does not work properly. In the jaco2 case, it tells me that there is no transform between root and world. In the fanuc case, it tells me there is no root frame. In both cases, if I rosrun joint_state_publisher joint_state_publisher and rosrun robot_state_publisher robot_state_publisher, the display in rviz becomes fine. In the fanuc case, I also have to change the fixed frame from root to base.
Are there any errors reported on the console?
In the moveit_setup_assistant console, you have this:
[ INFO] [1523968853.211934261]: Loaded j2n6s300 robot model.
[ INFO] [1523968853.212108872]: Setting Param Server with Robot Description
[ INFO] [1523968853.224460302]: Robot semantic model successfully loaded.
[ INFO] [1523968853.224504388]: Setting Param Server with Robot Semantic Description
[ INFO] [1523968853.242404264]: Loading robot model ‘j2n6s300’.
[ INFO] [1523968853.242462804]: No root/virtual joint specified in SRDF. Assuming fixed joint
[ INFO] [1523968854.251044917]: Stereo is NOT SUPPORTED
[ INFO] [1523968854.251239355]: OpenGl version: 2.1 (GLSL 1.2).
[ INFO] [1523968854.417290146]: Loading Setup Assistant Complete
[ INFO] [1523968854.436416385]: Loading robot model ‘j2n6s300’.
[ INFO] [1523968854.436540277]: No root/virtual joint specified in SRDF. Assuming fixed joint
Источник
Robot model status error
First time here? Check out the FAQ!
I would assume ROS can run in pure simulation? I’m trying to build a SLAM map of simulated environment while navigating through it (with path planning and obstacle avoidance) using the simulated TurtleBot. However most of the TurtleBot tutorials assume you have the TurtleBot hardware.
FYI, I’ve already got the TurtleBot simulator working via:
However I’m unsure how to:
- calibrate the simulated TurtleBot
- see the output of a simulated Kinect
- see the output of SLAM (and ideally the particles in the particle filter)
- see the output of the path planning
- drive the robot around (or set way points)
FYI, I would of thought I could do (5) via
But it doesn’t move the TurtleBot in the simulator — I assume its for the real hardware only?
Closed for the following reason the question is answered, right answer was accepted by SL Remy
close date 2017-07-21 02:01:02.598658
8 Answers

If the simulation is working properly the answers to your questions should be:
- You probably don’t need this.
2-5. Exactly as in the real robot tutorials!
The commands you have posted for 5. work fine for me. Did you use the correct buttons in the focused terminal to control?
You don’t need to calibrate the simulation (nor can you, in fact).
To view the output of the simulation, you can use rviz. I recommend:
Regarding driving the simulation — can you echo /cmd_vel when you’re running keyboard_teleop and verify that it’s publishing the right data?
How did you get teleop working, as the above command doesn’t work for me — I’ve been RTFM, but not luck as yet 😉 — any ideas?
What about viewing the Kinect sensor output in simulation, or path planning, or SLAM output? — Any ideas?
I’m new to ROS (however I was the co-author of a similar project DROS at http://dros.org), so please excuses my newbie questions about ROS. Anyway:
1) any good simulator should allow you to simulate the calibration steps. E.g. most DMU’s have a roll bias, so the simulator should have a hard coded roll bias. Could you please point me to the tutorials to calibrate a robot in pure simulation?
2) domhege, I’m sure they are, but the tutorials are not the most easiest to find (they seem rather split across pages, and sometimes are missing vital prerequisite), can you please point me to the tutorials I should be following.
3) re drive the robot around. I’ve just started up the empty world simulation as shown above, then run that keyboard teleo command above, and when I press «q» a few times, the robot in the simulator doesn’t not move. Any ideas what I maybe missing? Ryan, how do I «echo /cmd_vel»? can you point me to the tutorial on this?
4) Ryan, when I run that command it opens up, but I just see a black screen. Any ideas how to see the particles, kinect output, etc. And the output of «roslaunch turtlebot_navigation gmapping_demo.launch», keeps saying «[/openni_camera] No devices connected. waiting for devices to be connected» — which seems to be looking for the real Kinect hardware — so how do I tell it to use a simulated Kinect?
Re: Simulation
Personally I think a pure simulation feature should be mandatory for ROS (and its packages such as turtlebot), so researchers/engineers can see the best outcome (i.e. with zero errors), and then to basically switch on the simulated noise to get a better idea of how the solution will work in a real world with real robots.
Re: Tutorials
1) One suggestion would be to have a one-page howto for newbies, that contains a simple list of commands (and small description — with links to the full data), to get ROS up and running with (or without) a robot, to show the major features (i.e. sensor output, localisation output, mapping output, etc)
2) Also the TurtleBot tutorials seems to assume you have all the hardware. Is there a ROS tutorial to show you how to setup everything without the hardware. Basically I have a heap of personal robots I would like to get running with ROS, and I was hoping to base it off the TurtleBot — but since I don’t have the TurtleBot hardware, most of the tutorials keep leading me to dead ends (since the hardware is required for most steps).
Re: Driving
I see, I thought that hitting «q» alone would move the robot forward. I see need to use i, etc — so that is now solved for me.
Re: rviz
Yeah here is the following things in red, after running «roslaunch turtlebot_navigation gmapping_demo.launch» and «rosrun rviz rviz -d rospack find turtlebot_navigation /nav_rviz.vcg»
- Robot Model -> Status: Error -> This lists a heap of errors such as: No transform from [base_footprint] to [/map]
And «roslaunch turtlebot_navigation gmapping_demo.launch» keeps saying:
How do I give it a map? And the kinect error is simply because I don’t have a physical kinect attached (I’m currently waiting on a power/comms cable). Any thoughts on how to deal with this errors for a pure simulation method?
Источник
New issue
Have a question about this project? Sign up for a free GitHub account to open an issue and contact its maintainers and the community.
By clicking “Sign up for GitHub”, you agree to our terms of service and
privacy statement. We’ll occasionally send you account related emails.
Already on GitHub?
Sign in
to your account
Open
Abduoit opened this issue
Oct 17, 2017
· 4 comments
Open
robot model error in rviz
#8
Abduoit opened this issue
Oct 17, 2017
· 4 comments
Comments
![]()
Hi
I want to run the arm in rviz,
This is my launch file
<launch>
<node name="arbotix" pkg="arbotix_python" type="arbotix_driver" output="screen">
<rosparam file="$(find pxpincher_config)/config/pincher_arm.yaml" command="load" />
</node>
<!-- Now load robot model -->
<param name="robot_description" command="$(find xacro)/xacro.py '$(find pxpincher_description)/urdf/pincher_arm.urdf.xacro'"/>
<node name="robot_state_pub" pkg="robot_state_publisher" type="robot_state_publisher"/>
<node name="gripper_controller" pkg="arbotix_controllers" type="gripper_controller">
<param name="model" value="singlesided"/>
<param name="invert" value="true"/>
<param name="pad_width" value="0.0254"/>
</node>
</launch>
But I get robot model error in rviz as follow
gripper_link
No transform from [gripper_link] to [base_link]
![]()
I solved it by removing the following lines from the file pxpincher_description/urdf/turtlebot_arm.xacro
I do not know is that correct or not, I am afraid it will give me error when I want to do further arm control.
<!-- fake gripper_link joint gives us a free servo!
this makes us 5DOF and saves you $44.90
that's a lot of coin! -->
<link name="gripper_link"/>
<joint name="gripper_link_joint" type="revolute">
<origin xyz="0 0 0.112" rpy="0 -1.57 0"/>
<parent link="arm_wrist_flex_link"/>
<child link="gripper_link"/>
<limit effort="30" velocity="1" lower="-3.14" upper="3.14"/>
<axis xyz="1 0 0"/>
</joint>
![]()
I have problem like yours but nobody didnt answer correctly.
![]()
Hello, I have the same problem where i am getting the robotmodel error. Did any one found any solution for this ??
![]()
can anyone solve the robot model status error in Rviz..??????
Recommend Projects
-

React
A declarative, efficient, and flexible JavaScript library for building user interfaces.
-
Vue.js
🖖 Vue.js is a progressive, incrementally-adoptable JavaScript framework for building UI on the web.
-
Typescript
TypeScript is a superset of JavaScript that compiles to clean JavaScript output.
-
TensorFlow
An Open Source Machine Learning Framework for Everyone
-
Django
The Web framework for perfectionists with deadlines.
-
Laravel
A PHP framework for web artisans
-
D3
Bring data to life with SVG, Canvas and HTML. 📊📈🎉
Recommend Topics
-
javascript
JavaScript (JS) is a lightweight interpreted programming language with first-class functions.
-
web
Some thing interesting about web. New door for the world.
-
server
A server is a program made to process requests and deliver data to clients.
-
Machine learning
Machine learning is a way of modeling and interpreting data that allows a piece of software to respond intelligently.
-
Visualization
Some thing interesting about visualization, use data art
-
Game
Some thing interesting about game, make everyone happy.
Recommend Org
-
Facebook
We are working to build community through open source technology. NB: members must have two-factor auth.
-
Microsoft
Open source projects and samples from Microsoft.
-
Google
Google ❤️ Open Source for everyone.
-
Alibaba
Alibaba Open Source for everyone
-
D3
Data-Driven Documents codes.
-
Tencent
China tencent open source team.
На чтение 3 мин Просмотров 124к.
Роботам-пылесосам от компании Xiaomi свойственны адекватная цена и хорошее качество. Однако в процессе работы пылесоса пользователь может столкнуться с проблемами и ошибками, которые чаще всего вызваны неправильной настройкой или эксплуатацией, а в некоторых случаях заводским браком. Когда появляется ошибка, то на экране отображается соответствующий код, а к каждому из кодов существует расшифровка, которая поможет решить проблему.
Навигация по странице
- Как избежать ошибок в работе
- Признаки неправильной работы пылесоса
- Что делать, если ошибка все-таки произошла?
- Расшифровка всех кодов и устранение проблемы
- Часто задаваемые вопросы
Как избежать ошибок в работе
Чтобы избежать ошибок при использовании любой модели робота-пылесоса от Xiaomi, достаточно тщательно за ним следить и не позволять механизму засоряться. Необходимо вовремя менять фильтры и щетки, не затягивая с их заменой до последнего момента.
Обязательно нужно постоянно убирать пыль с датчиков, так как попадание мусора внутрь чревато поломкой механизма. Также всегда следите, чтобы при уборке на полу не было лишних предметов, — их попадание внутрь быстро приведет к поломке.

Признаки неправильной работы пылесоса
Роботы-пылесосы от Xiaomi просты в использовании, поэтому о сбое в работе вы узнаете сразу. На устройстве замигает красная лампочка, а сам пылесос издаст громкий звуковой сигнал. Затем устройство сообщит код ошибки: он либо высветится на экране, либо будет издан с помощью звукового оповещения. Данный код необходимо запомнить или записать: он поможет разобраться, что конкретно в работе устройства пошло не так.
Перед устранением проблемы обратите внимание на расположение пылесоса. Довольно распространенная причина звукового сигнала в том, что были закрыты датчики высоты или механизмы засорились пылью.
Что делать, если ошибка все-таки произошла?
Не паниковать! С большей частью ошибок вы сможете справиться самостоятельно в домашних условиях, главное — внимательно изучить устройство и понять, что именно вызвало проблему.
Все модели роботов-пылесосов Xiaomi имеют одинаковые коды ошибок. Найдите в таблице ниже тот код, который высвечивается на экране вашего устройства, и действуйте строго по инструкции.

Иногда обычный сброс настроек пылесоса помогает решить множество ошибок.
Расшифровка всех кодов и устранение проблемы
| Код ошибки | Расшифровка | Инструкция по устранению проблемы |
|---|---|---|
| 1 | Что-то мешает функионированию лазера. | Поверните лазер таким образом, чтобы его работу ничего не загораживало. Протрите датчики от пыли и уберите все лишнее. |
| 2 | Неправильная работа датчика столкновения. | Очистите от пыли и немного прижмите датчик столкновений. Если в него попали посторонние предметы, прижмите датчик несколько раз до их полного удаления. Если ничего лишнего не попадало в датчик, поместите пылесос в другое место. |
| 3 | Колесико застряло в воздухе. | Поместите пылесос на ровное место и слегка прокрутите колесико. |
| 4 | Датчик падения не чувствует пола. | Поместите устройство на более устойчивую поверхность, либо почистите датчик падения если он засорился. |
| 5 | Загрязнение основной щетки. | Вытяните щетку и крепление оси, а после очистите их от пыли и грязи. |
| 6 | Загрязнение боковых щеток. | Достаньте боковые щетки и очистите их от грязи. |
| 7 | Не работает колесико. | Осмотрите колесико и убедитесь, что ничего лишнего не попало внутрь. Вытащите посторонние предметы и переместите пылесос на другое место; либо извлеките и почистите колесико от грязи. |
| 8 | Пылесосу недостаточно места. | Пылесос застрял и ему недостаточно пространства: поставьте его в другое место. |
| 9 | Не установлен фильтр или пылесборник. | Замените компоненты, либо проверьте, правильно ли вы их установили. Обратите внимание, что после промывки фильтра ему необходимо просохнуть в течение суток. |
| 10 | Ошибка фильтра. | Убедитесь, что в фильтре нет мусора и пыли; проверьте, хорошо ли фильтр просох после промывки. |
| 11 | Повышенное магнитное поле. | Поместите пылесос подальше от виртуальной стены. |
| 12 | Недостаточно заряда. | Поставьте устройство на зарядку. |
| 13 | Проблема с поступлением заряда. | Проверьте, чтобы между пылесосом и док-станцией было надежное соединение. Если не поможет, протрите компоненты с помощью сухой ткани. |
| 14 | Ненормальная температура батареи. | Температура аккумулятора слишком высокая или слишком низкая. Отключите устройство от сети и дождитесь нормализации температуры. |
| 15 | Ошибка в датчике определения. | Уберите пыль с датчика расстояния. |
| 16 | Устройство стоит на неровной поверхности. | Переместите пылесос, установив его на ровную гладкую поверхность. |
| 17 | Ошибка в работе боковых щеток. | Вытяните и очистите боковые щетки либо сделайте сброс системы. |
| 18 | Ошибка в работе вентилятора втягивания. | Сделайте сброс настроек пылесоса. |
| 19 | У док-станции нет питания. | Проверьте подключение станции к сети; с помощью сухой ткани протрите контакты станции и пылесоса. |
| 20 | Внутренняя ошибка устройства. | Перезагрузите пылесос либо сбросьте настройки. |
| 21 | Ошибка в работе лазерного дальномера. | Дальномер прижат или ему мешают посторонние предметы. Уберите лишние предметы или переместите устройство. |
| 22 | Невозможность зарядки пылесоса. | Протрите контактные зоны для зарядки робота сухой тканью, удалите пыль. |
| 23 | Неправильная работа док-станции. | Протрите от пыли зону передачи док-станции. Избавьтесь от мусора на контактных зонах. |
Часто задаваемые вопросы
Нужно ли заряжать батарею полностью, а затем разряжать до конца в первые три зарядки?
Не нужно. Аккумулятор в пылесосе без эффекта памяти, поэтому достаточно просто полностью зарядить батарею при первом использовании.

Как сделать сброс устройства?
На корпусе есть кнопка «Reset» – нажмите на нее и подержите несколько секунд. Робот автоматически сбросит систему, в том числе настройки синхронизации, сети, режим уборки. Далее нужно будет заново подключить пылесос к Wi-Fi через Mi Home с помощью смартфона.

Что делать, если не получается сбросить систему?
Одновременно зажмите кнопки «Home» и «Reset» до тех пор, пока робот не издаст звуковое оповещение – после этого начнется принудительный сброс настроек.

Уборка по расписанию не работает, что делать?
Убедитесь, что уровень заряда робота больше 20%.
Почему робот не включается?
Возможно, низкий уровень заряда. Подключите устройство к док-станции. Также проблема может быть в слишком высокой или слишком низкой температуре аккумулятора, — подождите, пока температура батареи нормализуется.
Таким образом, большая часть ошибок в работе робота-пылесоса решается самостоятельно и в домашних условиях. Зачастую проблема кроется либо в неправильной установке устройства, либо в большом количестве мусора на датчиках или внутри пылесоса. Если же вы все сделали по инструкции, а ошибка продолжает появляться, рекомендуем обратиться в сервисный центр, так как самостоятельная разборка робота может привести к еще более серьезной поломке.