UnPinned posts
Anat2015
283
niknasmak
0
gudstartup
402
niknasmak
0
Anat2015
283
niknasmak
0
Anat2015
283
gudstartup
402
gudstartup
402
Anat2015
283
niknasmak
0
gudstartup
402
Anat2015
283
gudstartup
402
gudstartup
402
gudstartup
402
niknasmak
0
niknasmak
0
gudstartup
402
Присоединяйтесь к обсуждению
Вы можете опубликовать сообщение сейчас, а зарегистрироваться позже.
Если у вас есть аккаунт, войдите в него для написания от своего имени.
Примечание: вашему сообщению потребуется утверждение модератора, прежде чем оно станет доступным.
Содержание
- SIMODRIVE 611 ошибка 607 error 608 fault 609
- SIMODRIVE 611 ошибки:
- Ошибка 607 SIMODRIVE E-A607 SINUMERIK 300607
- Ошибка 608 SIMODRIVE E-A608 SINUMERIK 300608
- Ошибка 609 SIMODRIVE E-A609 SINUMERIK 300609
- SIEMENS SIMODRIVE 611 ремонт электронных плат на компонентном уровне.
- Simodrive 611 error codes
- Ремонт SIMODRIVE 611 E/R-MODUL 6SN1145-1BA02-0CA1
- Ошибки SIMODRIVE E/R-MODUL INT.36/47kW 6SN1145-1BA02-0CA1
SIMODRIVE 611 ошибка 607 error 608 fault 609

Блоки SIMODRIVE 611 широко используются на борту промышленных станков, в качестве блоков управления электродвигателями. Преобразователи Simodrive 611 зарекомендовали себя как надежные и универсальные сервоприводы. По достижению ресурсов наработки и внешних факторов эксплуатации, у преобразователей SIMODRIVE 611 возникают ошибки в работе. Рассмотрим неисправности, которые непосредственно касаются работы электродвигателей и то, к чему это всё может привести.

300607 E-A607 — предел регулятора тока
300608 E-A608 — предел регулятора частоты оборотов
300609 E-A609 — предельная частота преобразователя превышена
Чтобы гарантировано устранить любую неисправность SIMODRIVE 611 быстро и качественно , рекомендуем сделать ремонт в сервисном центре Волга Электро Сервис. Необходимые комплектующие есть в наличии. Срок выполнения в обычном режиме, в среднем занимает 2 дня, в экстренном режиме до 12 часов. Значительно экономичнее произвести ремонт, чем покупать новое.
Вместе с неисправностью SIMODRIVE 611 появляется сообщение об ошибке. Увидеть это можно на мониторе ЧПУ (ошибки SINUMERIK 300607 300608 300609) или на универсальных платах управления SIMODRIVE 611 которые снабжены дисплеем (Control Unit 611U ошибки E-A607 E-A608 E-A609). Отметим что, данные ошибки могут возникать только в момент активности электродвигателя, контроль данных ошибок возможен как в асинхронном, так и в синхронном режиме. Итак, что же означают сообщения о неисправностях.
SIMODRIVE 611 ошибки:
Ошибка 607 SIMODRIVE E-A607 SINUMERIK 300607
ПРЕДЕЛ РЕГУЛЯТОРА ТОКА
Заданный ток не может быть достигнут на электродвигателе, хотя задаётся максимальное напряжение. Электродвигатель не подключен или нет фазы.
Сообщение об ошибке означает, что измеренный ток электродвигателя — ниже заданного (ожидаемого) значения. При работе регулятора тока, при попытке достичь заданный ток, на обмотки двигателя было подано максимальное значение напряжения для данного двигателя, однако при этом заданный ток не был достигнут. Следовательно, дальнейшая работа запрещена. Необходима проверка оборудования.
Первые меры диагностики:
- Проверьте / замените силовой кабель двигатель — преобразователь (возможен обрыв в кабеле или плохой контакт в разъёме).
- С помощью омметра, измерьте сопротивление обмоток электродвигателя (возможен обрыв).
- Присутствует ли напряжение на шине промежуточного контура? (должно быть не менее 500 Вольт)
- Внимательно осмотрите крепёж винтов промежуточного контура (возможно один из винтов ослаблен).
- Проверьте контакт между платой управления и силовой частью (есть вероятность что плата управления вставлена не до конца).
- Обесточьте оборудование и через несколько минут снова подайте питание (возможно, сработал контроль Uce).
При возникновении ошибки 607 необходимо принять первые меры диагностики неисправности. Если первые меры диагностики не привели к положительному результату, значит, неисправна силовая, электронная плата преобразователя SIMODRIVE 611.
Ошибка 608 SIMODRIVE E-A608 SINUMERIK 300608
ПРЕДЕЛ РЕГУЛЯТОРА ЧИСЛА ОБОРОТОВ
Выход регулятора числа оборотов недопустимо долго находился в ограничении. Заданное значение моментов превышает предельное значение моментов или заданное значение тока – предельное значение тока.
Контроль активен только тогда, когда заданное значение числа оборотов меньше, чем установленный порог числа оборотов.
Первые меры диагностики:
- Проверьте / замените силовой и сигнальный кабели двигателя (возможен обрыв в кабеле или плохой контакт в разъёмах).
- Проведите диагностику механической части (двигатель заблокирован, перегружен или замкнут тормоз).
- Двигатель заземлен?
- Правильно ли подключены фазы двигателя(U V W)?
- Проверьте направление счёта энкодера и количество делений за 1 полный оборот вала электродвигателя.
- Если обновлялось ПО, проверьте установки регулятора.
- Присутствует ли напряжение на шине промежуточного контура? (должно быть не менее 500 Вольт)
- Внимательно осмотрите крепёж винтов промежуточного контура (возможно один из винтов ослаблен).
- С помощью омметра, измерьте сопротивление обмоток электродвигателя (возможно межвитковое замыкание обмоток).
- Замените плату управления Control Unit SIMODRIVE 611. Наиболее распространенная маркировка плат управления 6SN1118-0NH11-0AA1.
Сообщение 608 означает, что реальное количество оборотов не соответствует ожидаемому количеству оборотов. Неисправность может быть в соединительных кабелях, в электродвигателе, в энкодере электродвигателя, в плате управления или в силовой плате преобразователя. Необходимо принять первые меры диагностики. Если неисправность не устранилась, требуется ремонт SIMODRIVE 611 силовой электронной платы — LT-MODUL.
Ошибка 609 SIMODRIVE E-A609 SINUMERIK 300609
ПРЕДЕЛЬНАЯ ЧАСТОТА ПРЕОБРАЗОВАТЕЛЯ ПРЕВЫШЕНА
Фактическое значение числа оборотов электродвигателя, превышает предельную частоту датчика обратной связи (энкодера).
Измеренное число оборотов двигателя (скорость вращения ротора электродвигателя) — выше установленного значения максимальной частоты энкодера.
Первые меры диагностики:
- Возможно, неправильно сконфигурирован датчик (совпадает ли число делений датчика измерительной системы двигателя в конфигурации, с реальным числом делений энкодера?).
- Проверьте правильность подключения энкодера (распиновку можно найти в документации SIEMENS).
- Проверьте подключение экрана кабелей двигатель — преобразователь.
- Замените электродвигатель (вероятно проблема в энкодере).
- Замените плату управления 611D.
- Обратитесь в сервисный центр.
Если рекомендации по диагностике неисправности не привели к положительному результату, значит вышла из строя силовая плата преобразователя SIMODRIVE 611. Для восстановления работоспособности оборудования необходим ремонт преобразователя SIMODRIVE 611.
SIEMENS SIMODRIVE 611 ремонт электронных плат на компонентном уровне.
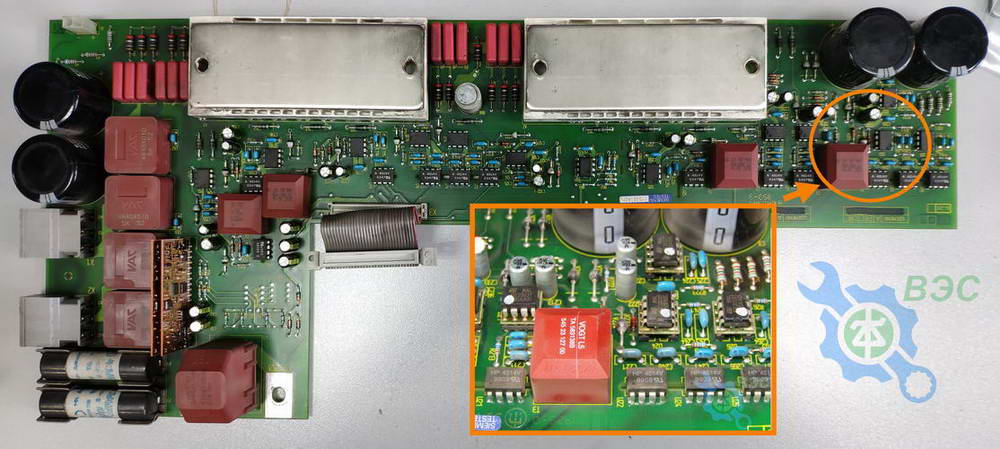
Чтобы устранять неисправности (в том числе 300607 300608 300609) необходимо понимать, как устроены силовые платы преобразователей SIMODRIVE 611 такие как 6SN1123-1AB00-0CA1 или 6SN1123-1AA01-0FA1. Рассмотрим подробнее силовую плату SIMODRIVE 611 6SN1123 блока управления двигателем. На фото выше, представлена 2-х осевая силовая плата SIMODRIVE 611 (каждая ось = 25 Ампер) 6SN1123-1AB00-0BA1. Условно, силовую плату можно разделить на 2 части: силовую и управляющую низковольтную. Основной компонент силовой части это IGBT модуль, он является активным элементом управления электродвигателем. Через его транзисторы подаётся напряжение на обмотки электродвигателя. Управляют транзисторами низковольтные схемы управления с фирменными микросхемами SIEMENS SIE20034.
Преобразователи например 6SN1123-1AA00-0DA1 или 6SN1123-1AA00-0BA2 заказчиков после ремонта «своими силами», частые гости в нашей лаборатории, и мы как никто знаем все ошибки и тонкости ремонта подобных плат. Существует много подводных камней, например подделки IGBT модулей (внешне такие же, а по факту на меньший ток), подделки микросхем SIE20034, межслойный пробой печатной платы, обрыв обмотки трансформатора тока и т.д. Ремонт неквалифицированными силами крайне редко заканчивается успехом и может дорогого стоить, как с точки зрения времени, так и финансовых вложений. Потому что после замены IGBT модулей необходима проверка низковольтных цепей управления, иначе IGBT модули придётся менять снова. Поэтому мы рекомендуем отправлять платы в ремонтные лаборатории, которые быстро, качественно и с гарантией устранят неисправность. Для ремонта силовых плат блоков SIMODRIVE 611 в том числе 6SN1123-1AA00-0LA1 наши лаборатории оборудованы специальными проверочными устройствами, благодаря которым ремонт и проверка цепей управления занимает не более 2-х дней.
Проверка платы SIMODRIVE 611 после ремонта.
Проверка платы после ремонта является таким же значимым моментом, как и сам ремонт. Потому что, перед включением на рабочем (высоком) напряжении, крайне важно отсутствие неисправностей низковольтных цепей. Иначе это может грозить повторным выходом из строя силовой части. Для полной проверки низковольтных цепей нужно в тонкостях представлять принципы работы схемотехники SIEMENS и обладать электрическими принципиальными схемами. Специалисты Волга Электро Сервис проверяют низковольтные цепи управления IGBT модуля по специальной, отлаженной методике. В ходе проверки IGBT модулей, мы используем лампы накаливания, что является достаточно безопасным решением. При такой проверке, протекаемый ток через IGBT модуль не превышает 2 Ампера, а напряжение на плату подаётся с регулируемых источников питания с функцией ограничения тока. Следует отметить, что на проверке цепей управления модулем, проверка низковольтных цепей не ограничивается. Также необходимо проверить работоспособность схемы измерения тока и контроля температуры IGBT модуля. Измерение тока двигателя основано на трансформаторах тока. Импульсы со вторичной обмотки трансформатора тока поступают на плату управления SIMODRIVE такие как 6SN1118-0NH11-0AA1 или 6SN1118-0DM33-0AA2, где и происходит обработка сигналов. Правильная работоспособность системы измерения тока очень важна. Ведь при управлении двигателем учитывается ток. В зависимости от показаний, ток двигателя корректируется. Если схема измеряет ток неправильно, например меньше реального, процессор будет поднимать ток на двигателе, что может привести к разрушению обмоток электродвигателя, в следствии чего придётся ремонтировать не только SIMODRIVE 611, но и заниматься перемоткой электродвигателя.



Испытания блоков SIMODRIVE 611 на специализированном испытательном стенде SIEMENS.
Для полной проверки преобразователей SIMODRIVE после ремонта, наша лаборатория оборудована специальным испытательным стендом SIEMENS. Благодаря данному обстоятельству, испытания проходят в максимально приближенных условиях будущей эксплуатации оборудования на производстве. Стенд собран на базе ЧПУ SINUMERIK 840D NCU571.5 6FC5357-0BB15-0AA0. Также стенд оборудован промышленным компьютером SINUMERIK PCU 50.3B-C 1.5GHz 6FC5210-0DF31-2AB0, панелью оператора SINUMERIK OPERATOR PANELFRONT 6FC5203-0AF02-0AA1, пультом оператора SINUMERIK MCP483C KEY MPI 6FC5203-0AF22-0AA2 источником питания SIMODRIVE 611 INFEED MODULE E/R-MODUL 36-47kW 6SN1145-1BA02-0CA1 и преобразователями 6SN1123-1AB00-0CA1 LT-MODUL INT.2X50A, 6SN1123-1AB00-0BA2 LT-MODUL INT.2X25A. Для проверки преобразователей мы подключаем синхронные электродвигатели SIEMENS, на нашем складе электродвигателей всегда можно найти двигатель с нужным (для проверки) энкодером или резольвером. Конфигурация стенда может меняться в зависимости от испытываемого оборудования.
Пример ошибки E-A607 на видео. Вместо двигателя в нагрузку подключены лампы накаливания, для безопасной проверки IGBT модуля. В процессе проверки преобразователя SIMODRIVE LT-MODUL EXT.2X50A 6SN1124-1AB00-0CA1 на лампах, при увеличении скорости, появилась ошибка 607. Видео с ошибкой E-A607 снято для лучшего понимания процесса возникновения ошибки. Надеемся, что это будет лучшим дополнением к описанной выше ошибке.
Волга Электро Сервис располагает своим складом блоков SIMODRIVE 611 и SINUMERIK. Иногда с помощью данного обстоятельства ремонт проводится в течении нескольких часов. Более подробнее про оборудование SIEMENS SIMODRIVE 611 нашего склада тут.
Источник
Simodrive 611 error codes
Волга Электро Сервис
Ремонт промышленной электроники
Ремонт электро двигателей
+7 927-718-44-77

РФ г.Тольятти ул.Фрунзе 2А
Вместе с эти читают:




Ремонт SIMODRIVE 611 E/R-MODUL 6SN1145-1BA02-0CA1


Функционально SIMODRIVE E/R-MODUL управляет питанием для системы приводов SIMODRIVE 611 6SN1123. Основными задачами является: преобразование переменного тока сети в постоянный ток и возврат энергии в сеть.
Поэтому иногда модули 6SN1145 называют блоками питания. Что в принципе правильно, так, как в дополнение к силовым клеммам у модуля присутствует разъем для питания плат управления 6SN1118. Если на вашем блоке SIEMENS SIMODRIVE 611 загорается, горит постоянно красный светодиод, то это говорит о неисправности или ошибке в этом модуле. Важно с целью предотвращения повторного выхода из строя модуля 6SN1145, выяснить причину по которой произошла неисправность блока питания. В половине случаев причина сгорания блока питания находится в неисправном приводе simodrive 611 6SN1123. Модули приводов всегда располагаются справой стороны от модуля 6SN1145. Необходимо убедиться в исправности приводов siemens simodrive 611 6SN1123, и только после этого устанавливать модуль блока питания. При повреждении силовых IGBT транзисторов в модуле 6SN1145 также выходит из строя внутренний сетевой контактор. Ниже приведены фотографии элементов поврежденного контактора. Процесс ремонта включает в себя разные этапы, требующие кропотливого труда.


Сервисный центр «Волга Электро Сервис» производит ремонт оборудования SIMODRIVE 6SN1145-1BA02-0CA1 и исправляет ошибки SIMODRIVE. Специально обученные специалисты, у которых находятся в распоряжении схемы подключения SIMODRIVE, всегда готовы помочь Вам устранить возникшую неисправность. Опыт обслуживания блоков SIEMENS составляет более 20 лет. Оборудованные лаборатории оснащены полным спектром необходимых инструментов и измерительных приборов. Проверенные, налаженные поставки запасных компонентов позволяют значительно сократить время восстановления работоспособности на ремонт SIMODRIVE.



Средний срок ремонта: 3 дня.
Цена: 30-50% от стоимости нового блока.
Гарантия: 6 месяцев.
Для оформления заявки на ремонт SIMODRIVE E/R-MODUL INT.36/47kW 6SN1145-1BA02-0CA1 Вам необходимо позвонить по телефону +7 9277-18-44-77 или написать нам на электронную почту volgaelectroservice@mail.ru.
Ошибки SIMODRIVE E/R-MODUL INT.36/47kW 6SN1145-1BA02-0CA1

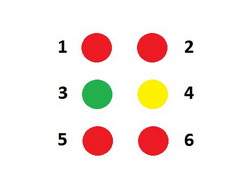
Описание светодиодов индикации SIMODRIVE 6SN1145 error codes led:
1 RED LED Spp error красный светодиод ошибки — повреждение питания электроники ±15 В
2 RED LED 5V error красный светодиод ошибки — повреждение в питании напряжением 5 В
3 GREEN LED Ext зеленый светодиод — нет внешней деблокировки SIMODRIVE 6SN1145 (клемма 63 и/или клемма 64 отсутствуют)
4 YELLOW LED UNIT желтый светодиод — эта индикация показывает и предупреждает, что заряжена промежуточная цепь подключения SIMODRIVE
5 RED LED Netz error code красный светодиод ошибки SIMODRIVE — сбой в сети (одно- многофазное отключение сети на клеммах U1, V1, W1)
— нет или неправильно выбран коммутационный дроссель
— мала мощность короткого замыкания сети или трансформатора
6 RED LED Uzk, Udc error красный светодиод ошибки — перенапряжение промежуточной цепи постоянного тока. Величина напряжения между шинами P600 и M600 превысила значение 710 / 740 Вольт. Порог срабатывания ошибки выбирается DIP-переключателем S1.1. Описание возможных причин ошибки Simodrive 6SN1145:
— выключена рекуперация DIP-переключателем S1.3. (режим рекуперации энергии в сеть имеется только в модулях E/R.)
— режим настройки — клемма 112. В режиме настройки рекуперация не работает.
— сбой в сети
— Если ошибка возникает на модуле UE, то возможной причиной может быть неисправный мощный резистор для сброса энергии.
— высокое напряжение сети
— динамическая перегрузка
В распоряжении специалистов Волга Электро Сервис находится современное диагностическое оборудование и электрические схемы. Благодаря этому проблемы с элементами внутри блока, из-за которых возникают ошибки SIMODRIVE 6SN1145-1BA02-0CA1, выявляются быстро и точно. Как показывает практика, часто бывают попытки ремонта заказчика «своими силами» или руками неквалифицированных мастеров, что ещё больше наносит урон электронным платам. Мы настоятельно рекомендуем производить ремонт SIMODRIVE 6SN1145-1BA02-0CA1 в квалифицированных сервисных центрах.
Источник
-
Contents
-
Table of Contents
-
Troubleshooting
-
Bookmarks
Related Manuals for Siemens SIMODRIVE 611 universal
Summary of Contents for Siemens SIMODRIVE 611 universal
-
Page 1
Description of Functions 04/2005 Edition simodrive SIMODRIVE 611 universal/universal E Control Components for Closed-Loop Speed Control and Positioning BP3834… -
Page 3
Product Overview Installing and Connecting–Up Parameterizing the Board SIMODRIVE 611 universal Commissioning SIMODRIVE 611 universal E Communications via Control Components for PROFIBUS–DP Closed–Loop Speed Control and Positioning Description of the Functions Description of Functions Description of Functions Description of Functions… -
Page 4
SIMATICr, SIMATIC HMIr, SIMATIC NETr, SIROTECr, SINUMERIKr, SIMODRIVEr and SIMODRIVE POSMOr are registered trademarks of Siemens AG. Other names in this publication might be trademarks whose use by a third party for his own purposes may violate the rights of the registered holder. -
Page 5
The sales contract contains the entire obligation of Siemens. The warranty conditions specified in the contract between the parties is the sole warranty of Siemens. Any statements contained herein neither create new warranties nor modify the existing warranty. -
Page 6
In addition, the list of differences in Chapter 1.4.5 must be carefully observed. Board Abbreviation (only for this purpose) SIMODRIVE 611 universal 611u SIMODRIVE 611 universal E 611ue E Siemens AG 2005 All Rights Reserved SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 7
For the individual faults and warnings, there is no software release– dependent coding regarding the parameters. E Siemens AG 2005 All Rights Reserved SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 8
Help topics for each parameter of the expert list Faults and warnings: The stop response (STOP I to STOP VII) is specified for each one E Siemens AG 2005 All Rights Reserved viii SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 9
”External position reference value” is now available in the ”Position- ing” mode Teach–in and incremental jogging Slave–to–slave communications, PROFIBUS–DP Dynamic Servo Control (DSC) E Siemens AG 2005 All Rights Reserved SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 10
– Bit masking for the ”Trace” function Passive referencing Filter parameterization (current, speed setpoint) ”SIMODRIVE 611 universal HR” control board (HR stands for high resolution) The functionality for ”SIMODRIVE 611 universal” described in the Description of Functions, also applies to ”SIMODRIVE 611 universal HR”… -
Page 11
Trained in the proper care and use of protective equipment in accor- dance with established safety procedures. Trained in rendering first aid. E Siemens AG 2005 All Rights Reserved SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 12
Reader’s note This symbol is shown, if it relates to important information which the reader must observe. E Siemens AG 2005 All Rights Reserved SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 13
When handling cables, observe the following: They may not be damaged, they may not be stressed, they may not come into contact with rotating components. E Siemens AG 2005 All Rights Reserved xiii SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 14
> 1 W close to the equipment (< 1.5 m) the function of the equipment can be disturbed. E Siemens AG 2005 All Rights Reserved SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 15
Only touch control boards, option modules and memory modules at the front panel or at the edge of the PC boards. E Siemens AG 2005 All Rights Reserved SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 16
Foreword 06.04 Space for your notes E Siemens AG 2005 All Rights Reserved SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 17: Table Of Contents
……1-53 1.4.5 What are the differences with respect to ”SIMODRIVE 611 universal”? 1-55 Installing and Connecting-Up .
-
Page 18
……..5-216 E Siemens AG 2005 All Rights Reserved xviii SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 19
……..6-426 E Siemens AG 2005 All Rights Reserved SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 20
……..7-629 E Siemens AG 2005 All Rights Reserved SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 21
…………..E-915 E Siemens AG 2005 All Rights Reserved SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 22
Table of Contents Space for your notes E Siemens AG 2005 All Rights Reserved xxii SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 23
……1-53 1.4.5 What are the differences with respect to ”SIMODRIVE 611 universal”? 1-55 E Siemens AG 2005 All Rights Reserved 1-23 SIMODRIVE 611 universal Description of Functions (FBU) –… -
Page 24: Product Overview
What can ”SIMODRIVE 611 universal” do? ! 611ue diff ! What can ”SIMODRIVE 611 universal” do? What can ”SIMODRIVE 611 universal” is a control board, which can be univer- ”SIMODRIVE 611 sally used in the modular SIMODRIVE 611 converter system as a re- universal” do? sult of its communication interfaces, the motors and encoder systems and option modules which can be used.
-
Page 25
! 611ue diff ! What can ”SIMODRIVE 611 universal” do? Optional modules The ”SIMODRIVE 611 universal” control board can be expanded by one of the following option modules: Optional TERMINAL module This module provides an additional 8 digital inputs and 8 digital out- puts (e.g. -
Page 26
(FEPROM) to save the following data: Firmware (system software) User data Where can The ”SIMODRIVE 611 universal” control board can be flexibly used in ”SIMODRIVE 611 many applications as a result of its design. universal” Typical applications for this control board are, e.g.:… -
Page 27
Resolver with pole pair numbers 1, 2, 3, 4, 5 and 6 Incremental encoders with TTL signals (only induction motors) (from SW 8.1) Fig. 1-1 Function overview for ”SIMODRIVE 611 universal” E Siemens AG 2005 All Rights Reserved 1-27 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 28
Supply infeed module (NE module) Power module(s) with control board – ”SIMODRIVE 611 universal” or – ”SIMODRIVE 611 universal HR” (from the middle of 2002 with SW 5.1) Note In the following chapters of the Description of Functions, a differentiation is not made between ”SIMODRIVE 611 universal”… -
Page 29
/Z/, Catalog NC Z, Accessories and Equipment Interactive Catalog CA01 /CD1/, DOC ON CD with all SINUMERIK 840D/810D/FM–NC and SIMODRIVE 611D documentation E Siemens AG 2005 All Rights Reserved 1-29 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 30: Simodrive 611 Universal» In The Simodrive 611 System
1FT6, 1FK6 or 1PH7 and e.g. 1FT6, 1FK6 or 1PH7 and encoders with sin/cos 1Vpp encoders with sin/cos 1Vpp Fig. 1-2 System overview (schematic) E Siemens AG 2005 All Rights Reserved 1-30 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 31
(SimoCom U) are possible: for PG/PC Parameterizing ”SIMODRIVE 611 universal” Axes traversed Settings optimized Firmware downloaded Series commissioning Diagnostics (e.g. measuring function) E Siemens AG 2005 All Rights Reserved 1-31 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 32: Simodrive 611 Universal» Control Board
”SIMODRIVE 611 universal” control board ! 611ue diff ! ”SIMODRIVE 611 universal” control board Description The ”SIMODRIVE 611 universal” control board is used in the SIMODRIVE 611 system, and it can be expanded using the optional TERMINALS or PROFIBUS–DP module. Features…
-
Page 33
The control board supports the ”Safe standstill” function. Detailed information about the ”Safe Standstill” function is provided Reference: /PJU/, SIMODRIVE 611, Configuration Manual, Drive Converters E Siemens AG 2005 All Rights Reserved 1-33 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 34
RS422 and 5 V power sup- ply voltage as pulse encoder for induction motors at the SIMODRIVE 611 universal HR” control board (Order No. 6SN1118–VNH01–0AAV). E Siemens AG 2005 All Rights Reserved 1-34 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 35: Control Board For 2 Or 1 Axis
(refer under the index entry ”Coding the mini connectors”). Fig. 1-3 Control boards for 2 axes E Siemens AG 2005 All Rights Reserved 1-35 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 36
(refer under the index entry ”Coding the mini connectors”). Fig. 1-4 Control board for 1 axis E Siemens AG 2005 All Rights Reserved 1-36 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 37: Elements On The Control Board Front Panel
X351 2) for 6SN1118–VNV01–0AAV: Order No.[MLFB] refer to Table 1-2 Fig. 1-5 Front panel elements (dummy cover removed, no option module inserted) E Siemens AG 2005 All Rights Reserved 1-37 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 38
Handling the display and operator unit How to parameterize ”SIMODRIVE 611 universal” is described in Chapter 3.2. To remove faults and warnings refer to Chapter 7.2. E Siemens AG 2005 All Rights Reserved 1-38 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 39
X471) (e.g. switches 7 and must be in the Standard setting same setting. Fig. 1-6 Location and settings of switch S1 E Siemens AG 2005 All Rights Reserved 1-39 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
must be in the Standard setting same setting. Fig. 1-6 Location and settings of switch S1 E Siemens AG 2005 All Rights Reserved 1-39 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 40: Optional Modules
Installing the option The input and output terminals (X422 and X432) The connection diagram and wiring/connecting the option module is included in Chapter 2. E Siemens AG 2005 All Rights Reserved 1-40 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 41
”SimoCom U via PROFIBUS” possible PROFIBUS–DP3 6SN1114–0NB01–0AA0 PROFIBUS–ASIC DPC31 with PLL ”Motion Control with PROFIBUS–DP” function (clock– synchronous PROFIBUS operation) is possible E Siemens AG 2005 All Rights Reserved 1-41 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 42
The connection diagram and wiring/connection of the option module ––> refer to Chapter 2 Communications via PROFIBUS–DP ––> refer to Chapter 5 E Siemens AG 2005 All Rights Reserved 1-42 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 43: Simodrive 611 Universal E» Control Board
”SIMODRIVE 611 universal E” control board ”SIMODRIVE 611 universal E” control board Description The ”SIMODRIVE 611 universal E” control board is used with SINUMERIK 802D with the ”motion control with PROFIBUS–DP” func- tion. Using this function, it is possible to implement a clock–synchronous drive coupling between a DP master (e.g.
-
Page 44: Diagram Of The Board And Optional Module
(refer under the index entry ”Coding the mini Equipment bus connectors”). Fig. 1-9 ”SIMODRIVE 611 universal E” control board with optional PROFIBUS–DP3 module E Siemens AG 2005 All Rights Reserved 1-44 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 45: Elements On The Control Board Front Panel
O0.A operator unit interface O1.A (RS232) X471 Equipment bus X351 Fig. 1-10 Elements on the front panel of ”SIMODRIVE 611 universal E” E Siemens AG 2005 All Rights Reserved 1-45 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 46: Description Of The Terminals, Interfaces And Operator Control Elements
The enable voltage (terminal 9) can be used to supply the enable signals (e.g. pulse enable) as 24 V auxil- iary voltage. 1) NC: NC contact; S: Supply E Siemens AG 2005 All Rights Reserved 1-46 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 47
0 V to 5 V Reference Maximum current: 3 mA 1) I: Input; S: Supply; IO: Input/output; MA: Measuring signal, analog 2) Can be freely parameterized E Siemens AG 2005 All Rights Reserved 1-47 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 48
The 4 analog cables can be routed away from the terminal strip. The shield of the cables must be connected and the ground cables must be connected to a common ground terminal. E Siemens AG 2005 All Rights Reserved 1-48 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 49
1 and 2 interpolation clock cycles (P1010). 3) I0.x is internally hard–wired to the position sensing function where it acts almost instantaneously. E Siemens AG 2005 All Rights Reserved 1-49 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 50
The digital outputs are updated in the interpolation clock cycle (P1010). This is supplemented by a hardware–related delay time of approx. 200 µs. E Siemens AG 2005 All Rights Reserved 1-50 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 51
Encoder limit frequency – Reserved Reserved – TTL encoder: – TTL encoder: 1 MHz 1 MHz – 1) I: Input; S: Supply E Siemens AG 2005 All Rights Reserved 1-51 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 52
Handling the display and operator unit To parameterize the drive, refer to Chapter 3.2 To remove faults and warnings, refer to Chapter 7.2.1 E Siemens AG 2005 All Rights Reserved 1-52 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 53: Commissioning The Board With «Simocom U
6. The PC/PG with ”SimoCom U” is connected to the control board (X471). Reader’s note Cable diagrams for the connecting cable refer to Chapter 2.5 Everything about ”SimoCom U” refer to Chapter 3.3 E Siemens AG 2005 All Rights Reserved 1-53 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 54
Note If drive B is to be commissioned, then the points must be executed for drive B from point 3 onwards. E Siemens AG 2005 All Rights Reserved 1-54 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 55: What Are The Differences With Respect To «Simodrive 611 Universal
From the 10.00 Edition (SW 3.1) the following is valid: This documentation contains information for ”SIMODRIVE 611 universal” and ”SIMODRIVE 611 universal E”. The information for ”SIMODRIVE 611 universal E” is provided in this Chapter. The following abbreviations have been introduced to identify the informa-…
-
Page 56
(indepen- P0801 = 1 is interpreted just like P0801 = 0 dent of the P0802 and P0803 are of no significance hardware) E Siemens AG 2005 All Rights Reserved 1-56 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 57
”Positioning”. from SW 3.3 Operating modes are not possible for SIMODRIVE 611 universal E ––> function is not available E Siemens AG 2005 All Rights Reserved 1-57 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 58
1 Product Overview 01.99 ”SIMODRIVE 611 universal E” control board Space for your notes E Siemens AG 2005 All Rights Reserved 1-58 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 59: Installing And Connecting-Up
……….2-85 E Siemens AG 2005 All Rights Reserved 2-59 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 60: Installing/Removing Control Boards And Modules
5. Connect–up the front panel of the board corresponding to the con- nection diagram (refer to Chapter 2.3.1). The mating connectors are inserted at the appropriate interface. E Siemens AG 2005 All Rights Reserved 2-60 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 61
PROFIBUS–DP1 option modules from SW 4.1 – and also in this particular case – can no longer be used. E Siemens AG 2005 All Rights Reserved 2-61 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 62
5. Check that the latches are correctly engaged. Control board Slot Latch memory module Latch Memory module Fig. 2-2 Installing/removing the memory module E Siemens AG 2005 All Rights Reserved 2-62 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 63
5. Install the ”SimoCom U” start–up tool with version 5.1 (or higher) or, when using an ”older” version, observe the following information: E Siemens AG 2005 All Rights Reserved 2-63 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 64
9. Re–connect the front panel of the module corresponding to the con- nection diagram. Insert the mating connector at the appropriate interface. E Siemens AG 2005 All Rights Reserved 2-64 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 65
Note For spare control boards, a set of installation instructions are provided which describes how the control board is replaced. E Siemens AG 2005 All Rights Reserved 2-65 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 66: Connecting-Up
(e.g. brake conductors) must be connected to PE potential in order to discharge charges arising from capacitive coupling. Hazardous voltages can occur if this is not observed. E Siemens AG 2005 All Rights Reserved 2-66 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 67
01.99 2 Installing and Connecting-Up Connecting–up Mini connector For the ”SIMODRIVE 611 universal” control board, a compact connec- MICRO– tor is used (this is also known as mini connector). COMBICON The following information is required when handling this mini connector: Introducing conductors (refer to Fig.2-4):… -
Page 68
É É É É É É Shrink tubing Exposed shield to scale Fig. 2-5 Preparing the cable end for the shield connection E Siemens AG 2005 All Rights Reserved 2-68 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 69: Connecting-Up And Setting The Line Supply Infeed Module
Information on setting switch S1 at the line supply infeed module is included in: Reference: /PJU/ SIMODRIVE 611, Configuration Manual, Drive Converters Chapter ”Line supply infeed (NE)” E Siemens AG 2005 All Rights Reserved 2-69 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 70: Connecting-Up The Power Module
Terminal 663 may only be energized if all of the main contacts of the power contactor are closed (e.g. terminal 663 is switched through an auxiliary contact of the power contactor). E Siemens AG 2005 All Rights Reserved 2-70 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 71: Connection Diagram And Wiring
Drive B (motor 2) 1) from SW 5.1, for 6SN1118–VNV01–0AAV: Order No.[MLFB] refer to Table 1-2 Fig. 2-6 Connection diagram for the control board E Siemens AG 2005 All Rights Reserved 2-71 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 72: Connecting-Up The Control Board
The gating pulses of the power The gating pulses of the power transistors are inhibited. transistors are enabled. 1) NC: NC contact E Siemens AG 2005 All Rights Reserved 2-72 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 73
9, then the reference potential (ground) of the external source must be con- nected to this terminal. 1) I: Input; S: Supply E Siemens AG 2005 All Rights Reserved 2-73 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 74
0 V to 5 V Reference Maximum current: 3 mA 1) IO: Input/output; MA: Measuring signal, analog 2) Can be freely parameterized E Siemens AG 2005 All Rights Reserved 2-74 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 75
4) Only with control board, Order No. 6SN1118–VNH01–0AAV, from SW 8.1 E Siemens AG 2005 All Rights Reserved 2-75 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 76
1 and 2 interpolation clock cycles (P1010). 3) I0.x is internally hard–wired to the position sensing function where it acts almost instantaneously. E Siemens AG 2005 All Rights Reserved 2-76 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 77
200 µs. VVVV (with SW 5.1 or higher) 3) ”SIMODRIVE 611 universal HR” Order No.[MLFB] 6SN1118– 1– E Siemens AG 2005 All Rights Reserved 2-77 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 78: Connection Diagram, Connecting-Up The Optional Terminal Module
X431 reference inputs (I: Input) internal Digital outputs (O: Output) Control board X432 Fig. 2-7 Connection diagram for the optional TERMINAL module E Siemens AG 2005 All Rights Reserved 2-78 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 79
The digital outputs are updated in the interpolation clock cycle (P1010). This is supplemented by a hardware–related delay time of approx. 200 µs. E Siemens AG 2005 All Rights Reserved 2-79 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 80: Connection Diagram, Connecting-Up The Optional Profibus-Dp Module
9–pin D–SUB socket connectors. If the cables are interchanged when connecting–up, this could destroy the module or board of the communications partner. E Siemens AG 2005 All Rights Reserved 2-80 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 81
/IK10/ SIMATIC NET, Industrial communications, Catalog IK 10 /STPI/ PROFIBUS & AS Interface, Components Connected to the Field Bus, Catalog ST PI E Siemens AG 2005 All Rights Reserved 2-81 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 82: Pin Assignment Of The Interfaces
(only with control board, Order No. 6SN1118–VNH01–0AAV, from SW 8.1) References: Catalog NC Z, Accessories and Equipment E Siemens AG 2005 All Rights Reserved 2-82 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 83
When set as an RS485 interface, a terminating resistor can be switched in/out via switch S1 on the front panel. The cable diagrams for the serial interface are provided in Chapter 2.5. E Siemens AG 2005 All Rights Reserved 2-83 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 84
Receive/send data P Receive/send data N B cable A cable RTS, Request To Send Reserved DGND, – – Data reference potential (M5V) E Siemens AG 2005 All Rights Reserved 2-84 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 85: Cable Diagrams
Setting the interface to e.g. COM1/COM2 for PC/PG RS232 (P0801 = 0) Fig. 2-11 RS232 connecting cable without RTS/CTS lines: PG/PC <–> SIMODRIVE 611 universal E Siemens AG 2005 All Rights Reserved 2-85 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 86
Setting the interface to e.g. COM1 V24/AG for PG RS232 (P0801 = 0) Fig. 2-12 RS232 connecting cable: PG <–> SIMODRIVE 611 universal j = B ––> Length 5 m Order no.: 6FC9 348–2Tj00 j = C ––> Length 10 m… -
Page 87
….3-103 3.3.4 Online operation: SimoCom U via PROFIBUS–DP (from SW 3.1) ..3-109 E Siemens AG 2005 All Rights Reserved 3-87 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 88: Overview When Parameterizing
”SimoCom U” Offline mode ––> the parameter set is processed in a file on the PG/PC Setup.exe Fig. 3-1 Overview when parameterizing E Siemens AG 2005 All Rights Reserved 3-88 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 89: Parameterizing Using The Display And Operator Unit
Display and control when faults and warnings occur (refer to Chapter 7.2) Operating statuses The display unit on the front panel of the ”SIMODRIVE 611 universal” of the display unit control board can have the following operating statuses: Table 3-1…
-
Page 90: Parameterizing Mode
Key + –: Key – Key P Value display – – Fig. 3-2 Handling parameters without sub–parameter and value display, max. 6 positions E Siemens AG 2005 All Rights Reserved 3-90 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 91
123 456.789) from the 7th position up to the 6th position Fig. 3-4 Handling parameters with sub–parameter and value display > 6 positions E Siemens AG 2005 All Rights Reserved 3-91 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 92
Handling parameters with sub–parameter and value display > 6 positions Note Examples: Display in A081.0H A081.0L P0081:0 = 123 456.789 mm 456.789 P0081:5 = –3 459.765 mm –3 459.765 E Siemens AG 2005 All Rights Reserved 3-92 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 93
Fast scrolling down – accelerating Jump to the parameter or sub–parame- ter display 1) Setting to the lower or the upper limit E Siemens AG 2005 All Rights Reserved 3-93 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 94
POWER ON Designating parameters which are effective after POWER ON Fig. 3-7 Designating parameters which are effective after POWER ON E Siemens AG 2005 All Rights Reserved 3-94 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 95: Example: Changing A Parameter Value
When reading/writing parameters using the display and operator unit, the following generally applies: The read and write protection (P0651) should be taken into account. E Siemens AG 2005 All Rights Reserved 3-95 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 96: Parameterizing Using The Parameterizing And Start-Up Tool Simocom U
Which version of SimoCom U optimally matches which drive and which drive software release? refer to SimoCom U as follows: Help ––> Info about ”SimoCom U” … ––> Versions E Siemens AG 2005 All Rights Reserved 3-96 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 97
– Double–click on the ”Software” symbol – Select the ”SimoCom U” program in the selection field – Press the ”add/remove…” button and then follow the instructions E Siemens AG 2005 All Rights Reserved 3-97 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 98: Entry Into Simocom U
Example: If a synchronous motor is set, then a ramp–function generator is not made available in the dialog boxes for parameterization. E Siemens AG 2005 All Rights Reserved 3-98 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 99
Using this function, access protection can be provided for SimoCom U and the drive firmware so that the drive configuration cannot be changed. To set the password protection, refer to Chapter 4.3.3. E Siemens AG 2005 All Rights Reserved 3-99 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 100
”my.par” file, then you will only see the parameters of this file. Opened parameter files can also be re–closed: Menu ”File/Close file”. E Siemens AG 2005 All Rights Reserved 3-100 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 101
PC. back to the terminals The master control is only transferred back to the terminals after acknowledgement. E Siemens AG 2005 All Rights Reserved 3-101 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 102
If these assumptions are not applicable, then you can always undo by canceling. E Siemens AG 2005 All Rights Reserved 3-102 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 103: Online Operation: Simocom U Via A Serial Interface
Parameterizing using the parameterizing and start–up tool SimoCom U Integrated help The ”SimoCom U” tool has an integrated Help function, which helps you to use the tool and the ”SIMODRIVE 611 universal” drive. This is how you call up the integrated help function: Using the menu command Help «…
-
Page 104
Before changing over the serial interface, it must be checked that the appropriate ”correct” connecting cable is connected at X471. Interface For ”SIMODRIVE 611 universal”, the interface parameters for the serial parameters interface are permanently assigned and cannot be changed. -
Page 105
(e.g. PG/PC ”SimoCom U” COM 1) Setup.exe RS232 connecting cable Serial interface (X471) Fig. 3-9 Communications via RS232 E Siemens AG 2005 All Rights Reserved 3-105 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 106
– Power supply: via the connector on the RS485 side RS485 side (+24 V/0.5 W) – Data transfer rate: set to 38.4 kbaud E Siemens AG 2005 All Rights Reserved 3-106 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 107
Other nodes on the bus ––> terminating resistor switched–out (switch S1, refer to Chapter 1.3.2) Example: Communications from a PG/PC to 3 ”SIMODRIVE 611 universal” con- Communications trol boards (2–axis versions) should be possible via the serial interface. between the PG/PC… -
Page 108
Essentially the same as when specifying the possible node addresses (drive numbers), up to 31 drives can be connected to an RS232/RS485 interface converter (PC/PPI cable). E Siemens AG 2005 All Rights Reserved 3-108 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 109: Online Operation: Simocom U Via Profibus-Dp (From Sw 3.1)
––> if the coupling is via OPC server Then, online operation can be established directly to the drive via the fieldbus using the ”Search for online drives” function. E Siemens AG 2005 All Rights Reserved 3-109 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 110
In order to go online with a drive via the PROFIBUS–DP fieldbus using ”SimoCom U”, the following prerequisites must be fulfilled: 1. ”SIMODRIVE 611 universal” control board from SW 3.1 with the fol- lowing option module: – Optional PROFIBUS–DP2 module (with ASIC DPC31 without PLL) Order No. -
Page 111
Category ”Profibus–DPV1–OPC server Version 1.0” fulfill this requirement. When selecting the interface, SimoCom U offers this OPC server in a separate selection box. E Siemens AG 2005 All Rights Reserved 3-111 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 112
– Alternatively, the so–called ClassID of the OPC server can be directly entered under the ”Specify OPC server name (only for experts!). E Siemens AG 2005 All Rights Reserved 3-112 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 113
P0918 (node address) = 15 P0918 (node address) = 16 P0918 (node address) = 17 Fig. 3-11 SimoCom U via PROFIBUS (example with 3 control boards) E Siemens AG 2005 All Rights Reserved 3-113 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 114
3 Parameterizing the Board 01.99 Parameterizing using the parameterizing and start–up tool SimoCom U Space for your notes E Siemens AG 2005 All Rights Reserved 3-114 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 115
… 4-193 4.12 Connecting induction motors with TTL encoder (from SW 8.1) ..4-197 E Siemens AG 2005 All Rights Reserved 4-115 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 116: General Commissioning Information
P0649 = 1 (from SW 3.1) via the SimoCom U tool using the ”boot board” function (from version 03.03) E Siemens AG 2005 All Rights Reserved 4-116 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 117
01.99 4 Commissioning General commissioning information Prerequisites The SIMODRIVE 611 universal control board can be commissioned the fastest if the following prerequisites are checked and fulfilled before commissioning commissioning is started: Table 4-1 Prerequisites for commissioning The following conditions must be fulfilled before commissioning! The SIMODRIVE drive group has been configured. -
Page 118
This is the case for the existing software releases t SW 4.1 or qSW 7.2. E Siemens AG 2005 All Rights Reserved 4-118 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 119: Run-Up Of «Simodrive 611 Universal
The drive is now in cyclic operation Faults/errors which occur at run–up, are displayed flashing, in the display unit. Display unit Fig. 4-1 Run–up of ”SIMODRIVE 611 universal” E Siemens AG 2005 All Rights Reserved 4-119 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 120: Commissioning Via Simocom U
”SimoCom U” parameterizing and start–up tool: 1. All of the prerequisites for commissioning, according to Chapter 4.1, have been fulfilled, i.e. the system with ”SIMODRIVE 611 universal” can be commissioned. 2. The checklist for commissioning according to Chapter 4.1 has been checked.
-
Page 121: First Commissioning With Simocom U
Note If drive B is to be commissioned, then the points must be executed for drive B from point 3 onwards. E Siemens AG 2005 All Rights Reserved 4-121 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 122: Series Commissioning With Simocom U
A and have pressed ”open”, the file is downloaded into drive A. Note If drive B is to be commissioned, then the points must be executed for drive B from point 3 onwards. E Siemens AG 2005 All Rights Reserved 4-122 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 123: Password Protection With Simocom U (From Sw 8.1)
”check” in the ”Activate password protection” field (righthand window) 6. Enter a PIN (4–digit number from 1000…9999) and acknowledge E Siemens AG 2005 All Rights Reserved 4-123 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 124
E Siemens AG 2005 All Rights Reserved 4-124 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 125
When using A&D Data Management (ADDM) and other programs, that protection and SimoCom U uses, then password protection may not be activated. other programs with SimoCom U E Siemens AG 2005 All Rights Reserved 4-125 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 126: Automated Firmware Download (From Sw 8.1)
––> The Windows registry editor signals that the settings have been successfully transferred into the registry ––> Again acknowledge this message with ”Enter”. E Siemens AG 2005 All Rights Reserved 4-126 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 127
E Siemens AG 2005 All Rights Reserved 4-127 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 128: Commissioning Using The Display And Operator Unit
5. Set the PROFIBUS node address ––> refer to Chapter 5.7.2 Fig. 4-3 Commissioning using the display and operator unit (Part 1 of 3) E Siemens AG 2005 All Rights Reserved 4-128 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 129
(P0652 = 0) (cyclic operation) Fig. 4-4 Commissioning using the display and operator unit (Part 2 of 3) E Siemens AG 2005 All Rights Reserved 4-129 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 130
Attachment (refer to Chapter A.3.1, A.3.4 and A.3.5) is classified as an unlisted motor. The motor can be supplied from Siemens or from another motor manufacturer. To commission an unlisted motor, the associated parameters are required (refer under the index entry ”… -
Page 131: Function-Initiating And Diagnostic Parameters
The parameter is automatically set to 0 at the end of the data save operation. Data is being saved – other parameters cannot be selected E Siemens AG 2005 All Rights Reserved 4-131 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 132
(P1235) –24 The ratio between the rated motor frequency (P1134) and the rated motor speed (P1400) is not permissible (pole pair number) E Siemens AG 2005 All Rights Reserved 4-132 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 133
Determine the leakage inductance and rotor resistance Determine the no–load current and magnetizing reactance Determine the speed at field weakening Determine the moment of inertia E Siemens AG 2005 All Rights Reserved 4-133 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 134
Motor data set 2 (P2xxx) active Motor data set 3 (P3xxx) active Motor data set 4 (P4xxx) active Note: Motor changeover is described in Chapter 6.11. E Siemens AG 2005 All Rights Reserved 4-134 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 135
Freely parameterizable output terminals (standard assignment for n–set) O3.x: Motor temperature pre–warning O1.x: Ramp–up completed O0.x: Ready or no fault O2.x: | n | < n E Siemens AG 2005 All Rights Reserved 4-135 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 136
Image, output signals, Part 2 P0658 Image, output signals, Part 3 P0678 Image of the input terminals P0698 Image of the output terminals E Siemens AG 2005 All Rights Reserved 4-136 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 137: Parameters For Hardware, Operating Mode And Clock Cycles
This means that the controller data is internally calculated and the motor code number corresponding to the motor type is saved. Automatic The ”SIMODRIVE 611 universal” control board has an automatic power power module module detection function, i.e. the control board automatically detects identification and identifies power modules with this function.
-
Page 138
(Exception: Unlisted encoder). For unlisted encoders, the parameters must be manually assigned (refer to Chapter A.4). E Siemens AG 2005 All Rights Reserved 4-138 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 139
08.01 4 Commissioning Parameters for hardware, operating mode and clock cycles Parameters The operating mode of ”SIMODRIVE 611 universal” is set using P0700 for the (operating mode). operating mode It is not possible to change over the operating mode in the powered–on status, as the parameter only becomes effective after POWER ON. -
Page 140
Position controller clock cycle: must be an integer multiple of the speed contr. clock cycle Interpolation clock cycle: must be an integer multiple of the position contr. clock cycle E Siemens AG 2005 All Rights Reserved 4-140 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 141: Induction Motor Operation With Induction Motor
The IM function permits pure encoderless operation (IM operation) or mixed operation (encoderless operation/operation with encoder). The induction motor operation for a ”SIMODRIVE 611 universal” drive is used for 4–quadrant closed–loop speed control of induction motors without speed or rotor position encoder.
-
Page 142
0 < P1465 < n P1465 MSD––> ARM with encoder signal evaluation IM ––> ARM without encoder signal evaluation Fig. 4-6 Operating ranges, MSD/IM E Siemens AG 2005 All Rights Reserved 4-142 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 143
This reactor is taken into account in the current model using P1119. E Siemens AG 2005 All Rights Reserved 4-143 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 144: Commissioning Induction Motors (Arm) Without Encoder
When optimizing the motor data, motor movements are initiated, which can reach the maximum motor speed. Motor data The use of unlisted induction motors with ”SIMODRIVE 611 universal” optimization is supported with the motor data optimization. Often, the commissioning engineer only knows the rating plate data (manufacturer’s data according to DIN VDE 0530, Part 1) of the motor.
-
Page 145
! ON only if not continue on the next automatically page identified Fig. 4-7 Commissioning induction motors without encoder (Part 1) E Siemens AG 2005 All Rights Reserved 4-145 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 146
Save to FEPROM (P0652 = 1) Execute POWER–ON RESET continue on the next page Fig. 4-8 Commissioning induction motors without encoder (Part 2) E Siemens AG 2005 All Rights Reserved 4-146 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 147
Enable write protection (P0651 = 0) Save parameters in the file and document Fig. 4-9 Commissioning induction motors without encoder (Part 3) E Siemens AG 2005 All Rights Reserved 4-147 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 148: Motor Data Optimization, Steps 1 To 4
The motor does not move and may not move during this measurement. Monitoring is not possible, as the induction motor does not have an encoder. E Siemens AG 2005 All Rights Reserved 4-148 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 149
(refer to P1084 in Chapter A.1) Start again after the fault has been removed. Changed The following parameters are calculated/written into: parameters P1136, P1141 E Siemens AG 2005 All Rights Reserved 4-149 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 150
(refer to P1084 in Chapter A.1) Start again after the fault has been removed. Changed The following parameters are calculated/written into: parameters P1142 E Siemens AG 2005 All Rights Reserved 4-150 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 151
Start again after the fault has been removed. Changed The following parameters are calculated/written into: parameters P1117 Parameter For IM operation (encoderless operation), the following parameters are overview available: E Siemens AG 2005 All Rights Reserved 4-151 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 152
For pure IM operation (P1465 = 0), the drive is open–loop, current–frequency controlled below the speed set using this parameter. Note: The parameter is preset when executing the ”calculate controller data”/”calculate unlisted motor” function. E Siemens AG 2005 All Rights Reserved 4-152 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 153: Permanent-Magnet Synchronous Motor With Field-Weakening (Pe Spindle)
Detailed information on 1FE1 motors, configuring and mounting built–in motors are provided in: Reference: /PJFE/ AC Motors for Main Spindle Drives Synchronous Build–in Motors 1FE1 Planning/Mounting Guide Manufacturers Documentation E Siemens AG 2005 All Rights Reserved 4-153 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 154
The prerequisites are as follows: prerequisites Control board SIMODRIVE 611 universal for encoders with sin/cos 1Vpp Maximum motor cable length = 50 m E Siemens AG 2005 All Rights Reserved 4-154 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 155: Commissioning 1Fe1 Motors
–> Standard motor –> 1FT6, 1FK6, 1FE1, 1FW6 (synchronous) ––> select the motor used ––> continue with the ”measuring system/encoder” dialog box E Siemens AG 2005 All Rights Reserved 4-155 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 156
After the data that has been set has been carefully checked, the drive configuration is completed by pressing ”Accept this drive configuration”. E Siemens AG 2005 All Rights Reserved 4-156 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 157
Reader’s note Additional commissioning instructions/information regarding motor optimization are provided in the following. E Siemens AG 2005 All Rights Reserved 4-157 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 158
The angular offset is automatically entered into P1016 ––> Fault 799 (Save to FEPROM and HW–RESET required) is displayed Save to FEPROM and carry–out a HW–RESET E Siemens AG 2005 All Rights Reserved 4-158 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 159
(the values were already entered together with the motor data): P1180 = 0 %, P1181 = 30 %, P1182 = 30 % E Siemens AG 2005 All Rights Reserved 4-159 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 160: Current Controller Adaptation
––> OK ––> not OK ––> OK, not optimum Fig. 4-11 How should the step response be evaluated? E Siemens AG 2005 All Rights Reserved 4-160 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 161
P1107 = 50 A(pk) ––> 50 A/√2 ≈ 36 A(rms) ––> 50 % 8 18 A 10 % 8 3.6 A, etc. ––> E Siemens AG 2005 All Rights Reserved 4-161 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 162
P1182: Percentage value referred to P1120 (P gain, current controller) The following applies: P1180 (lower current limit adaptation) < P1181 (upper current limit adaptation) E Siemens AG 2005 All Rights Reserved 4-162 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 163: Parameters For Pe Spindles
This means, if the power module rating is too low, then the maximum speed will not be reached. Otherwise, the functionality is not restricted. E Siemens AG 2005 All Rights Reserved 4-163 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 164
Operation with reluctance torque: P1128 and P1149 not equal to the standard value Operation without reluctance torque: P1128 and P1149 equal to the standard value E Siemens AG 2005 All Rights Reserved 4-164 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 165: 1Fw6 Build-In Torque Motors (From Sw 6.1)
Detailed information on 1FW6 motors and to engineer and mount build–in torque motors is provided in: Reference: /PJTM/ Configuration Manual 1FW6 Build–in Torque Motors Manufacturers documentation E Siemens AG 2005 All Rights Reserved 4-165 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 166
When engineering the HFD commutating reactor with resistor, refer to: Reference: /PJU/ SIMODRIVE 611 Configuration Manual Manufacturers Documentation E Siemens AG 2005 All Rights Reserved 4-166 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 167: Commissioning 1Fw6 Motors
1FW6 motors with rameterizing and start–up tool: SimoCom U Reader’s note Also refer to commissioning 1FE1 motors with SimoCom U in Chapter 4.8.2. E Siemens AG 2005 All Rights Reserved 4-167 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 168: Thermal Motor Protection
Detailed information on how to connect and evaluate the temperature monitoring circuits is provided in: Reference: /PJTM/ Configuration Manual 1FW6 Build–in Torque Motors Manufacturers documentation E Siemens AG 2005 All Rights Reserved 4-168 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 169: Linear Motors (1Fn1, 1Fn3 Motors)
– Is the motor already mounted and ready to be powered up? – If a cooling circuit is being used, is it functional? E Siemens AG 2005 All Rights Reserved 4-169 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 170
(Temp–F). ––> Overtemperature switch (Temp–S) The individual motor phase windings can be digitally monitored for overtemperature using the overtemperature trip circuit (Temp–S). E Siemens AG 2005 All Rights Reserved 4-170 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 171
Also refer to Reference: /PJLM/ Configuration Manual 1FN1, 1FN3 Linear Motors Section ”General information on the connection system (CON)” E Siemens AG 2005 All Rights Reserved 4-171 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 172: Commissioning: Linear Motor With One Primary Section
––>Unlisted motor ”Motor” field ”Motor type” field –> Enter data –> Linear motor (SLM) The motor data should be entered after ”continue”. E Siemens AG 2005 All Rights Reserved 4-172 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 173
After the data that has been set has been carefully checked, the drive configuration is completed by pressing ”Accept this drive configuration”. E Siemens AG 2005 All Rights Reserved 4-173 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 174
Save the parameters and carry–out a POWER ON RESET. c) Depending on the measuring system used, proceed as follows: E Siemens AG 2005 All Rights Reserved 4-174 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 175
Alarm 799 is displayed not transferred. Save parameters and carry–out a POWER–ON RESET Fig. 4-12 Incremental measuring system E Siemens AG 2005 All Rights Reserved 4-175 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 176
P1025 Alarm 799 is displayed Save parameters and carry–out a POWER–ON RESET Fig. 4-13 Absolute measuring system E Siemens AG 2005 All Rights Reserved 4-176 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 177
7. Set or carry–out referencing/adjusting – Increm. measuring system: Referencing (refer to Chap. 6.2.5) – Absolute measuring system: Adjust (refer to Chapter 6.2.7) E Siemens AG 2005 All Rights Reserved 4-177 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 178
Save to FEPROM and carry–out a HW–RESET For incremental measuring system (incremental – no or several zero marks): Save to FEPROM and carry–out a HW RESET E Siemens AG 2005 All Rights Reserved 4-178 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 179: Commissioning: Linear Motor With 2 Identical Primary Sections
For a Janus configuration (refer to Chapter 4.10.7) interchange phases U and V. 7. Power–up with the pulse and controller enable signals switched out E Siemens AG 2005 All Rights Reserved 4-179 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 180
(2 S 1FNx …) enter the data of the unlisted motor connected in parallel (refer under the index entry ”unlisted motor – parameters for SLM”) E Siemens AG 2005 All Rights Reserved 4-180 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 181
The angular offset is automatically entered into P1016 ––> Fault 799 (Save to FEPROM and HW–RESET required) is displayed Save to FEPROM and carry–out a HW–RESET E Siemens AG 2005 All Rights Reserved 4-181 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 182: Mechanical System
Measurable air gap l [mm] (without taking into account the mounting –0.45 –0.45 dimension tolerance) 13 $ 1 13 $ 1 Clearance b [mm] (without taking into account the mounting dimension tolerance) E Siemens AG 2005 All Rights Reserved 4-182 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 183
Table 4-11, either the motor has been incorrectly mounted, or the specified motor dimensions were not maintained when the motor was produced. E Siemens AG 2005 All Rights Reserved 4-183 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 184: Thermal Motor Protection
Temp–F can be optionally connected to a measuring device for commissioning and testing. For regular operation, the Temp–F connections should be short–circuited and connected to PE. E Siemens AG 2005 All Rights Reserved 4-184 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 185
E Siemens AG 2005 All Rights Reserved 4-185 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 186
The characteristics of the PTC elements are in compliance with DIN VDE 0660 Part 303, DIN 44081 and DIN 44082. E Siemens AG 2005 All Rights Reserved 4-186 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 187
Reader’s note Section ”General information on the connection system (CON)” in: Reference: /PJLM/ Configuration Manual, 1FN1, 1FN3 Linear Motors E Siemens AG 2005 All Rights Reserved 4-187 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 188: Measuring System
(= clockwise rotating field U, V, W) coincides with the positive counting direction of the measuring system. Note The data to determine the drive direction is only valid for Siemens motors (1FNx motors). If the positive direction of the drive and positive counting direction of the measuring system do not coincide, then when commissioning, the speed actual value (P1011.0) must be inverted in the ”measuring…
-
Page 189
The positive counting direction of the linear measuring system from the Zeiss company should be determined just like the measuring system RGH22B from Renishaw (refer to Fig. 4-19). E Siemens AG 2005 All Rights Reserved 4-189 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 190
DIN EN 50178. Information on protective separation can be taken from: Reference: /PJLM/ Configuration Manual, 1FN1, 1FN3 Linear Motors E Siemens AG 2005 All Rights Reserved 4-190 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 191: Parallel And Double-Cam Arrangement Of Linear Motors
DIN EN 50178. Information on protective separation can be taken from: Reference: /PJLM/ Configuration Manual, 1FN1, 1FN3 Linear Motors E Siemens AG 2005 All Rights Reserved 4-191 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 192: Checking The Linear Motor By Making Measurements
Ö Ö Ö Ö Ö Ö Ö Ö Ö Ö Ö Ö Ö Ö Ö Ö Ö Ö Ö Fig. 4-21 The positive direction of the drive (clockwise rotating field) E Siemens AG 2005 All Rights Reserved 4-192 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 193: Direct Measuring System For Position Control (From Sw 3.3)
Ä Ä Ä Ä Í Í Í Í Í Í Í Í Spindle Coupling Fig. 4-22 Indirect and direct measuring system for drive A E Siemens AG 2005 All Rights Reserved 4-193 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 194
A via P0672. e.g. the ”Equivalent zero mark” function (P0672=79) or ”flying measurement” (P0672=80) E Siemens AG 2005 All Rights Reserved 4-194 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 195
P0175 is set to 0. A re–adjustment is re- quired. 9. Which measuring system does the drive control use? ––> refer to P1792 (active measuring system) E Siemens AG 2005 All Rights Reserved 4-195 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 196
1027 IM configuration, encoder 1037 DM configuration, encoder 1) IM ––> indirect measuring system (motor encoder) 2) DM ––> direct measuring system (encoder 2) E Siemens AG 2005 All Rights Reserved 4-196 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 197: Connecting Induction Motors With Ttl Encoder (From Sw 8.1)
TTL encoder: (refer to Chapter P1011 IM configuration, actual value sensing A.1) P1005 IM encoder pulse number P1027 IM configuration, encoder E Siemens AG 2005 All Rights Reserved 4-197 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 198
4 Commissioning 01.99 4.12 Connecting induction motors with TTL encoder (from SW 8.1) Space for your notes E Siemens AG 2005 All Rights Reserved 4-198 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 199
Example: Coupling 2 drives (master, slave drive) ….5-323 E Siemens AG 2005 All Rights Reserved 5-199 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 200
The system can be configured in the following ways (refer to Chapter 5.7): – using the GSD file (SIEM808F.GSD/SI02808F.GSD) – using the ”Slave object manager” (Drive ES) E Siemens AG 2005 All Rights Reserved 5-200 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 201
The PROFIdrive Profile provides a total of 6 different application classes. ”SIMODRIVE 611 universal” is in conformance with the profile for application Class 1 and from SW 6.1, application Class 4. The following functional scope has been implemented corresponding to the directive PROFIdrive V3.1 –… -
Page 202
SimoCom U, a baud rate q187.5 kbaud should be set. When commissioning the fieldbus, the baud rate is defined the same for all devices starting from the master. E Siemens AG 2005 All Rights Reserved 5-202 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 203: General Information About Profibus-Dp For «Simodrive 611 Universal
Protocols The communications type corresponds to the protocol shown in Fig. 5-2 for the ”DP slave 611U”. E Siemens AG 2005 All Rights Reserved 5-203 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 204
Non–cyclic data transfer: DPV1 parameter channel PG/PC RS232/RS485 S7 protocol + data transfer protocol DP slave 611U Fig. 5-2 Protocol for ”DP slave 611U” E Siemens AG 2005 All Rights Reserved 5-204 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 205
08.01 5 Communications via PROFIBUS DP General information about PROFIBUS–DP for ”SIMODRIVE 611 universal” ”SIMODRIVE 611 The ”SIMODRIVE 611 universal” control board together with the optio- universal” with nal PROFIBUS–DP module is used to connect drives to higher–level optional automation systems via PROFIBUS–DP. -
Page 206: Basic Functions Of The Cyclic Data Transfer
––> refer to Chapter 5.9 under P0875 1) Transfer is optional and is defined by appropriately configuring the system. Fig. 5-4 Telegram structure for cyclic data transfer E Siemens AG 2005 All Rights Reserved 5-206 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 207
SW 3.1: (from SW 3.1) By selecting a standard telegram By freely configuring a telegram ––> Refer to Chapter 5.6.5 E Siemens AG 2005 All Rights Reserved 5-207 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 208: Basic Functions Of The Non-Cyclic Data Transfer
PROFIBUS side reduced by 1 (n–1). PKW (cyclic) ”SIMODRIVE 611 universal” is compatible to the PKW mechanism in the PROFIdrive Profile, Version 2 and P0879.11; this allows a non–cy- clic parameter access to be carried–out within the cyclic data ex- change.
-
Page 209
Parameter descriptions can be read so that now a master knows which parameters a drive knows and the properties which each of these pa- rameters has. E Siemens AG 2005 All Rights Reserved 5-209 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 210
Class 1 (PLC e.g. SIMATIC S7) (e.g. TP170B) SIMATIC OP S7 protocol + DPV1 PROFIBUS–DP DP slave 611U Fig. 5-6 Communications, SIMATIC OP – ”SIMODRIVE 611 universal” E Siemens AG 2005 All Rights Reserved 5-210 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 211
EMERGENCY STOP signal should be connected to SIMATIC OP, as an interrupted connection between SIMATIC OP and ”SIMODRIVE universal” does not result in a drive fault. E Siemens AG 2005 All Rights Reserved 5-211 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 212: Terminal Signals And Profibus Signals
––> n mode possible via terminal 56.x/14.x The analog speed setpoint via 56.x/14.x is used. The speed setpoint transferred via PROFIBUS–DP is ignored. E Siemens AG 2005 All Rights Reserved 5-212 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 213: Internal Effect Of Profibus Signal And Hardware Terminals
STW1.1: Control word 1, bit 1 Fig. 5-7 Central enable signals and their dependency on the hardware terminals and PROFIBUS signals E Siemens AG 2005 All Rights Reserved 5-213 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 214
STW1.1: OC/OFF 2 ZSW1.5: STW1.2: OC/OFF 3 No OFF 3 present Fig. 5-8 Statuses dependent on the hardware terminals and PROFIBUS signals E Siemens AG 2005 All Rights Reserved 5-214 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 215
Withdraw the controller enable, terminal 65.x, or Reset control signal STW1.0 Switching out the power–on inhibit? The power–on inhibit can be switched–out with P1012.12 = 0. E Siemens AG 2005 All Rights Reserved 5-215 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 216: Net Data (Pkw And Pzd Area)
”Process data in the pos mode control words …” refer to the ”Process data in the pos mode – status words – …” E Siemens AG 2005 All Rights Reserved 5-216 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 217
– from SW 7.1 MDIAcc MDI acceleration override 50225 – from SW 7.1. MDIDec MDI deceleration override 50227 – from SW 7.1 E Siemens AG 2005 All Rights Reserved 5-217 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 218
3) Process data for encoder 2 must be activated via P0879.12. 4) Data type: U16/U 32 ––> unsigned integer 16/32 bit ; I16/I 32 ––> integer 16/32 bit E Siemens AG 2005 All Rights Reserved 5-218 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 219
50202 (n–set from SW 5.1) PosZsw Positioning status word 50204 – XistP Position actual value (pos. mode) 50206 – from SW 3.1 E Siemens AG 2005 All Rights Reserved 5-219 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 220: Description Of The Control Words (Setpoints)
Operating condition/OFF 2 ON/OFF 1 Note: The control signals, from the perspective of ”SIMODRIVE 611 universal”, are input signals and are described in Chapter 6.4.3. Also refer in the index under ”Input signal, digital …”. The signals designated like this must have at least a 1–signal in order to be able to operate a motor with the speed setpoint NSOLL_A or NSOLL_B.
-
Page 221
Operating condition/OFF 2 ON/OFF 1 Note: The control signals, from the perspective of ”SIMODRIVE 611 universal”, are input signals and are described in Chapter 6.4.3. Also refer in the index under ”Input signal, digital …”. The signals which have been identified in this way, must have at least a 1 signal in order to be able to start a traversing block using the control signal ”activate traversing task (edge)”. -
Page 222
Bit 1 Bit 0 Note: The control signals, from the perspective of ”SIMODRIVE 611 universal”, are input signals and are described in Chapter 6.4.3. Also refer in the index under ”Input signal, digital …”). 1) Only available in the n–set mode… -
Page 223
Assumptions: The speed setpoint is entered via nsoll–h and P0880 = 16384 ––> resolution = 1, i.e. 1 digit 8 1 RPM E Siemens AG 2005 All Rights Reserved 5-223 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 224
= maximum (0; 1 – 16384 Example: Assumption: Best possible resolution for the full limiting range Input: P0881 = 25 % E Siemens AG 2005 All Rights Reserved 5-224 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 225
8 5 V, if the shift factor = 0 and the offset = 0 4000 8 10 V, if the shift factor = 1 and the offset = 0 4000 E Siemens AG 2005 All Rights Reserved 5-225 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 226
(n–set mode) (from SW 5.1) 1000 8 1 degree Data transfer format: Example: XSP = 145500 ––> 145.5 degrees E Siemens AG 2005 All Rights Reserved 5-226 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 227
Parameterize with P0888 Parameterize with P0888 Note: The control signals, from the perspective of ”SIMODRIVE 611 universal”, are input signals and are de- scribed in Chapter 6.4.3. Also refer in the index under ”Input signal, digital …”). Control word For two rigidly connected drives, the actual torque setpoint of the… -
Page 228
Correction, external reference value via dXcor (from SW 4.1) Note: The control signals, from the perspective of ”SIMODRIVE 611 universal”, are input signals and are described in Chapter 6.4.3 . Also refer in the index under ”Input signal, digital …”). -
Page 229
Block selection (Traversing block 0 to 63) Note: The control signals, from the perspective of ”SIMODRIVE 611 universal”, are input signals and are de- scribed in Chapter 6.4.3. Also refer in the index under ”Input signal, digital …”). E Siemens AG 2005 All Rights Reserved 5-229 SIMODRIVE 611 universal Description of Functions (FBU) –… -
Page 230
Set reference point Tracking operation Note: The control signals, from the perspective of SIMODRIVE 611 universal are input signals and are described in Chapter 6.4.3 (also refer to the index entry under Input signal, digital …). Control word The percentage value for the velocity override is specified using this Over control word. -
Page 231
Xext can be connected with the XsollP or XistP quantities from the (from SW 4.1) master drive. When using a SIMODRIVE 611 universal in the n–set mode as master drive, a connection can be made with the actual value Gx_XIST1 from the encoder interface. -
Page 232
The following ID is only active for MDI: x0x = ABSOLUTE x1x = RELATIVE x2x = ABS_POS x3x = ABS_NEG 0xx = END 3xx = CONTINUE EXTERNAL E Siemens AG 2005 All Rights Reserved 5-232 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 233: Description Of The Status Words (Actual Values)
Ready or no fault Ready to be powered–up/not ready to be powered–up Note: From the perspective of SIMODRIVE 611 universal, status signals are output signals and are described in Chapter 6.4.6. Also refer in the index under ”Output signal, digital …”).
-
Page 234
Ready or no fault Ready to be powered–up/not ready to be powered–up Note: From the perspective of SIMODRIVE 611 universal, status signals are output signals and are described in Chapter 6.4.6. Also refer in the index under ”Output signal, digital …”). -
Page 235
Bit 1 Bit 0 Note: From the perspective of SIMODRIVE 611 universal, status signals are output signals and are described in Chapter 6.4.6. Also refer in the index under ”Output signal, digital …”). 1) Only available in the n–set mode Status word For closed–loop speed controlled operation, the speed actual value is… -
Page 236
| < n | M | < M Ramp–up completed Note: From the perspective of SIMODRIVE 611 universal, status signals are output signals and are described in Chapter 6.4.6. Also refer in the index under ”Output signal, digital …”). Status word ADU1 The actually converted values of the 2 analog inputs of a drive are dis- played using these status words. -
Page 237
––> pos mode: Position controller clock cycle (P1009) non–clock–cycle synchronous PROFIBUS–DP ––> n–set mode: Position controller clock cycle (P1009) ––> pos mode: Interpolation clock cycle (P1010) E Siemens AG 2005 All Rights Reserved 5-237 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 238
DP clock cycle, sensed at instant in time T non–clock–cycle synchronous PROFIBUS–DP ––> n–set mode: Position controller clock cycle (P1009) ––> pos mode: Interpolation clock cycle (P1010) E Siemens AG 2005 All Rights Reserved 5-238 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 239
Request passive referencing (from SW 5.1) Correction, external reference value via dXcor (from SW 4.1) Note: From the perspective of SIMODRIVE 611 universal, status signals are output signals and are described in Chapter 6.4.6. Also refer in the index under ”Output signal, digital …”). -
Page 240
As long as the block is not active, a –1 is displayed. The actual block number is displayed with the input signal ”activate traversing task”. From the perspective of SIMODRIVE 611 universal, status signals are output signals and are described in Chapter 6.4.6. -
Page 241
Setpoint static Velocity limiting active Tracking mode active Note: From the perspective of SIMODRIVE 611 universal, status signals are output signals and are described in Chapter 6.4.6. Also refer in the index under ”Output signal, digital …”). Status word The actual DC link voltage in the drive is displayed using this status UDClink1 word. -
Page 242
Transfer format: P0884 and P0896 define the position output format P0884 Output value = position in MSR @ The following applies: P0896 E Siemens AG 2005 All Rights Reserved 5-242 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 243: Encoder Interface (N-Set Mode, From Sw 3.1)
The process data for encoder 2 must be activated via P0879.12. The description of this process data can be taken from the following literature: Reference: /PPA/, PROFIdrive Profile Drive Technology E Siemens AG 2005 All Rights Reserved 5-243 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 244
Read value x Read value x Abort function x Flying measurement Mode Mode Find reference marker (zero marker or BERO proximity switch) E Siemens AG 2005 All Rights Reserved 5-244 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 245
Acknowledge Acknowledge en- encoder error coder error Gx_ZSW.11 Encoder fault acknowledge active Clear error Signal must be reset by user No request E Siemens AG 2005 All Rights Reserved 5-245 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 246
1 Reference marker 1/2 Actual value transfer Signal must be reset by user Fig. 5-14 Function chart for ”find reference marker” E Siemens AG 2005 All Rights Reserved 5-246 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 247
Measuring probe deflected G1_ZSW.8 Measuring probe edge Actual value transfer Signal must be reset by user Fig. 5-15 Function chart for ”flying measurement” E Siemens AG 2005 All Rights Reserved 5-247 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 248
Reserved Encoder fault acknowledge active Note: Encoder fault acknowl- edge active Refer under STW.15 (acknowledge encoder error) No acknowledgement active – Reserved E Siemens AG 2005 All Rights Reserved 5-248 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 249
No acknowledgement Encoder or actual value sensing fault present Note: Encoder error The error code is stored in Gx_XIST2 No fault present E Siemens AG 2005 All Rights Reserved 5-249 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 250
The following applies after power up: Gx_XIST1 = 0 An overflow Gx_XIST1 must be viewed from the higher–level con- trol In the drive there is no modulo view of Gx_XIST1 E Siemens AG 2005 All Rights Reserved 5-250 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 251
Encoder 1, fine resolution, absolute track G1_XIST2 P1045 Encoder 2, fine resolution, absolute track G2_XIST2 P1042 Encoder 1, fine resolution G1_XIST1 P1044 Encoder 2 fine resolution G2_XIST1 E Siemens AG 2005 All Rights Reserved 5-251 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 252
Encoder pulses = 1024 S No. of pole pairs of resolver – The following applies for resolvers with 14–bit resolution: Encoder pulses = 4096 S No. of pole pairs of resolver E Siemens AG 2005 All Rights Reserved 5-252 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 253
Change of function type Requested value not available Not exactly 1 value to be retrieved Abort absolute value EnDat encoder not used transmission on E Siemens AG 2005 All Rights Reserved 5-253 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 254
– Input terminal I0.B (fast input from drive B) can be assigned a function for encoder 2 from drive A via P0672. e.g. the ”equivalent zero mark” or ”flying measurement” function E Siemens AG 2005 All Rights Reserved 5-254 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 255: Configuring Process Data (From Sw 3.1)
P0916:8 = 50011 ––> G1_XIST1 is assigned to PZD8 ––> as G1_XIST1 is a double word (32 bits), it must be assigned 2 PZDs. E Siemens AG 2005 All Rights Reserved 5-255 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 256
MDIAcc 16 bit 50227 MDI deceleration override (from SW 7.1) MDIDec 16 bit 50229 MDI mode (from SW 7.1) MDIMode 16 bit E Siemens AG 2005 All Rights Reserved 5-256 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 257
An overview of the control words is available in Chapter 5.6.1. The process data for encoder 2 must be activated via P0879.12. E Siemens AG 2005 All Rights Reserved 5-257 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 258
32 bit 50208 Position reference value (from SW 4.1) XsollP 32 bit 50210 Correction, pos. ref. value (from SW 4.1) Xcor 32 bit E Siemens AG 2005 All Rights Reserved 5-258 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 259
An overview of the status words is provided in Chapter 5.6.1. The process data for encoder 2 must be activated via P0879.12. E Siemens AG 2005 All Rights Reserved 5-259 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 260
AktSatz PosZsw ZSW2 xxxx xxxx xxxx Actual point P0916 P0916 P0916 P0916 P0916 P0916 P0916 50002 50202 50204 50004 yyyy yyyy yyyy E Siemens AG 2005 All Rights Reserved 5-260 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 261
50002 50008 50008 50004 50010 50011 50011 50012 50012 This process data is associated with the encoder interface (refer to Chapter 5.6.4) E Siemens AG 2005 All Rights Reserved 5-261 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 262
50002 50008 50008 50004 50010 50011 50011 50012 50012 This process data is associated with the encoder interface (refer to Chapter 5.6.4) E Siemens AG 2005 All Rights Reserved 5-262 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 263
G2_XIST2 P0916 P0916 P0916 P0916 50015 50015 50016 50016 This process data is associated with the encoder interface (refer to Chapter 5.6.4) E Siemens AG 2005 All Rights Reserved 5-263 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 264
50008 50008 50004 50102 50010 50011 50011 50012 50012 This process data is associated with the encoder interface (refer to Chapter 5.6.4) E Siemens AG 2005 All Rights Reserved 5-264 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 265
P0916 P0916 P0916 P0916 50018 50019 50019 50020 50020 This process data is associated with the encoder interface (refer to Chapter 5.6.4) E Siemens AG 2005 All Rights Reserved 5-265 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 266
50008 50008 50004 50102 50010 50011 50011 50012 50012 This process data is associated with the encoder interface (refer to Chapter 5.6.4) E Siemens AG 2005 All Rights Reserved 5-266 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 267
P0916 P0916 P0916 P0916 50014 50015 50015 50016 50016 This process data is associated with the encoder interface (refer to Chapter 5.6.4) E Siemens AG 2005 All Rights Reserved 5-267 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 268
QZsw Xcor P0916 P0916 P0916 P0916 P0916 P0916 P0916 P0916 P0916 P0916 50002 50202 50204 50004 50102 50208 50208 50118 50210 50210 E Siemens AG 2005 All Rights Reserved 5-268 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 269
ZSW1 AktSatz PosZsw ZSW2 MeldW XistP Actual point P0916 P0916 P0916 P0916 P0916 P0916 P0916 50002 50202 50204 50004 50102 50206 50206 E Siemens AG 2005 All Rights Reserved 5-269 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 270: Defining The Process Data According To The Ppo Type
(e.g. PPO1 and PPO3). PPO type 3 is sufficient for closed–loop speed controlled operation with a simple basic functionality (2 control and 2 status words). E Siemens AG 2005 All Rights Reserved 5-270 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 271
08.99 04.99 5 Communications via PROFIBUS DP Net data (PKW and PZD area) Example: The ”SIMODRIVE 611 universal” drive should be operated in the mode Operating the ”speed/torque setpoint” with a speed of 1500 RPM via PROFIBUS–DP. drive via PROFIBUS Assumptions for the slave: in the closed–loop… -
Page 272
(e.g. PPO1 and PPO3). For the positioning mode with a basic functionality, PPO type 3 is sufficient (2 control and 2 status words). E Siemens AG 2005 All Rights Reserved 5-272 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 273: Parameter Area (Pkw Area)
Parameter ID value Parameter value Process data Task and response ID Parameter ID (refer to Table 5-29 or 5-30) Parameter number E Siemens AG 2005 All Rights Reserved 5-273 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 274
Quickly change the parameter value (array, double word) Note: All of the ”SIMODRIVE 611 universal” parameters can be read and written into the using the task IDs 6, 8 and 10. The negative response ID is 7. The IDs are defined so that they indicate which fields of the PK interface must also be evaluated. -
Page 275
Integer number without sign WORD (unsigned) 16 bit Unsigned32 Integer number without sign DWORD (unsigned) 32 bit Floating point Floating–point number REAL E Siemens AG 2005 All Rights Reserved 5-275 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 276
08.99 02.03 Net data (PKW and PZD area) Transferring For ”SIMODRIVE 611 universal”, the traversing blocks in the ”positio- traversing blocks ning” operating mode are saved in parameters, and can therefore be read and changed using the PKW mechanism. Reader’s note The parameters for the traversing blocks are described in Chapter 6.2.10. -
Page 277
This repetitive procedure can be exited if a ”0” is in one of the sub– parameters. All of the faults of the last fault situation are then detected. E Siemens AG 2005 All Rights Reserved 5-277 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 278
There are additional application examples in the toolbox with the ”read/write parameter” function (e.g. interface 611u <––> S7 in the file ”611u39.arj”). E Siemens AG 2005 All Rights Reserved 5-278 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 279
– If AK = 5, PNU = 81, IND = 3 and PWE2 = 14586 then OK – If AK = 7, then evaluate the fault number in PEW 278 (refer to Table 5-31) E Siemens AG 2005 All Rights Reserved 5-279 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 280
There are additional application examples in the toolbox with the ”read/write parameter” function (e.g. interface 611u <––> S7 in the file ”611u39.arj”). E Siemens AG 2005 All Rights Reserved 5-280 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 281: Settings At The Profibus Dp Master
These files uniquely describe the features and properties of the ”DP slave 611U” in a precisely defined format. The GSD file must be inserted into the configuring tool of the master. E Siemens AG 2005 All Rights Reserved 5-281 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 282
The parameterizing and configuration data, received from the ”DP slave 611U” are displayed in the following parameters: P1783:64 received PROFIBUS parameterizing data P1784:64 received PROFIBUS configuration data E Siemens AG 2005 All Rights Reserved 5-282 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 283
(consistent over 1 word) 1–axis 2–axis 1–axis 2–axis F3F1 F3F1F3F1 7371 73717371 F3F5 F3F5F3F5 7375 73757375 F1F1 7171 F5F5 7575 F3F9 F3F9F3F9 7379 73797379 E Siemens AG 2005 All Rights Reserved 5-283 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 284
PKW section is always consistent Without PKW with PZD = D7EE D7EE 576E 576E 8/15 words (I/O) 01FE 01FE D7EE 576E E Siemens AG 2005 All Rights Reserved 5-284 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 285: Commissioning
(e.g. terminal 663, 65.x). Thus, the enable signals via the PROFIBUS control word are no longer necessary. E Siemens AG 2005 All Rights Reserved 5-285 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 286
(consistent over one word): ––> An SFC14/15 cannot be used. Instead, a direct peripheral access must be used (PAW/PEW). E Siemens AG 2005 All Rights Reserved 5-286 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 287
– Press the ”POWER–ON RESET” button on the front panel of the board ––> the selected PROFIBUS node address is effective after run–up E Siemens AG 2005 All Rights Reserved 5-287 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 288
Using ”read/write parameter ” via PKW section The parameters of the ”DP slaves 611U” can be read/written into via the PKW section from the PROFIBUS–DP master. E Siemens AG 2005 All Rights Reserved 5-288 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 289: Diagnostics And Troubleshooting
Display and operator control unit for faults and warnings (refer to Chapter 7.2) – Fig. 5-23 Fault display on the control board E Siemens AG 2005 All Rights Reserved 5-289 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 290
PROFIBUS–DP appropriate parameters. Status signal for The ”SIMODRIVE 611 universal” drive signals as to whether there is at faults least one fault using the status bit or output signal ZSW1.3 ”Fault pre- sent/no fault present”. -
Page 291
The warnings which occurred, are displayed, bit–coded in P0953 to warnings via P0960. PROFIBUS–DP The ”SIMODRIVE 611 universal” drive signals as to whether there is at Status signal for warnings least one message present via the status bit or output signal ZSW1.7 ”Warning present/no warning present”. -
Page 292
P1783:64 received PROFIBUS parameterizing data configuration data P1784:64 received PROFIBUS configuration data (from SW 3.1) E Siemens AG 2005 All Rights Reserved 5-292 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 293: Motion Control With Profibus-Dp (From Sw 3.1)
When PROFIBUS runs–up, the information required by the DP slaves, is transferred from the master to all of the slaves via the parameterizing telegram. E Siemens AG 2005 All Rights Reserved 5-293 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 294
When configuring the bus system, it should be ensured, that espe- cially when, e.g. repeaters or optical bus components are used, the maximum permissible jitter is not exceeded. E Siemens AG 2005 All Rights Reserved 5-294 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 295: Equidistant Dp Cycle Operation In The N-Set Mode
(from SW 3.3) Additional measuring system at X472 ––> Encoder 3 TTL encoder, P0890 = 4, only SIMODRIVE 611 universal E The encoder interface must be configured in the process data. ––> Refer to Chapter 5.6.5 Position control loop Motor…
-
Page 296
Reserve: ”Active pause” until the isochronous (equidistant) cycle has expired = 2 S T Fig. 5-26 Example: optimized DP cycle with T MAPC E Siemens AG 2005 All Rights Reserved 5-296 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 297: Equidistant Dp Cycle Operation In The Positioning Mode
Velocity Time Axis 1 Axis 2 Interpolation clock cycle (IPO clock cycle) Fig. 5-27 Example: Simultaneously starting the traversing motion E Siemens AG 2005 All Rights Reserved 5-297 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 298
Reserve: ”Active pause” until the isochronous (equidistant) cycle has expired Fig. 5-28 Example: T = 4 ms and T = 8 ms E Siemens AG 2005 All Rights Reserved 5-298 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 299
DP master SIMATIC S7 (SFC 11 ”DPSYNC_FR”) The SYNC mechanism may only be activated after the drive has set the status bit ZSW1.9 ”control requested”. E Siemens AG 2005 All Rights Reserved 5-299 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 300: Times In The Equidistant Dp Cycle
= 0, the following is valid: T Minimum time interval between T and T O_MIN = 1 S T = 125 µs O_MIN BASE_IO E Siemens AG 2005 All Rights Reserved 5-300 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 301
= 0 µs Calculation: T PLL_D = 1/12 µs at 12 Mbaud 1) The values correspond to the master device file SIEM808F.GSD E Siemens AG 2005 All Rights Reserved 5-301 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 302: Bus Run-Up, Synchronization And Net Data Save
The status signal ZSW1.9 (control requested/no control possible) = ”1” The slave sign–of–life (ZSW2.12 to ZSW2.15, value = 1 to 15) is counted E Siemens AG 2005 All Rights Reserved 5-302 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 303
– The status signals ZSW2.12 to ZSW2.15 are used as slave sign–of–life. – The slave sign–of–life counter is incremented in every DP cycle E Siemens AG 2005 All Rights Reserved 5-303 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 304: Parameterization Using The Parameterizing Telegram
P1783:64 is used for diagnostics, parameterizing data. P1783:0 No. of valid bytes P1783:1 1st byte of the received parameterizing data, etc. Fig. 5-29 Parameterizing telegram Set_Prm E Siemens AG 2005 All Rights Reserved 5-304 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 305: Parameter Overview Of Profibus-Dp
(refer under the index entry ”Start–up PROFIBUS–DP”). After disabling the communications or the module, P0875 must be again set to P0872. E Siemens AG 2005 All Rights Reserved 5-305 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 306
SW 4.1) … defines the normalization of the override when entered via PROFIBUS. the override in P0883 4000 or 16384 E Siemens AG 2005 All Rights Reserved 5-306 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 307
… is used to assign the signals to the process data in the actual value telegram. ––> Refer to Chapter 5.6.5 E Siemens AG 2005 All Rights Reserved 5-307 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 308
A description of the faults, the way in which they can be acknowledged as well as a list of all the faults, is provided in Chapter 7. This parameter is reset at POWER ON. E Siemens AG 2005 All Rights Reserved 5-308 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 309
9.6 kbit/s 19.2 kbit/s 93.75 kbit/s 187.5 kbit/s 500 kbit/s 1500 kbit/s 3000 kbit/s 6000 bit/s 12000 kbit/s 31.25 kbit/s 45.45 kbit/s E Siemens AG 2005 All Rights Reserved 5-309 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 310
P1782:0 Number of valid entries P1782:1 Target offset of process data 1 (ZSW1) P1782:2 Target offset of process data 2 (PZD2), etc. E Siemens AG 2005 All Rights Reserved 5-310 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 311
:9 PLL window (Tpllw) in 1/12us :10 PLL delay time (Tplld) in 1/12us :11 External slave–to–slave communication connections :12 Internal slave–to–slave communication connections E Siemens AG 2005 All Rights Reserved 5-311 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 312
P1788:3 to P1788:10 have the value 0 An overview of the process data in the speed–controlled mode and in the positioning mode is included in Chapter 5.6.1. E Siemens AG 2005 All Rights Reserved 5-312 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 313
P1012.2 Function switch Bit 2 ”Ready or no fault” P1012.12 Function switch Bit 12 ”power–on inhibit” P1795 Optional module (PROFIBUS): Firmware version E Siemens AG 2005 All Rights Reserved 5-313 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 314: Slave-To-Slave Communications (From Sw 4.1)
Layer 2 function code (DXB.req). The publisher then sends its input data to the master with a broadcast telegram to all bus nodes. E Siemens AG 2005 All Rights Reserved 5-314 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 315
Master drive <––> Slave drive Closed–loop speed controlled Open–loop torque controlled Entering digital input signals from another slave (refer to Chapter 5.10.4) E Siemens AG 2005 All Rights Reserved 5-315 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 316
––> via PROFIBUS control signal ”QZsw.0” – ”Request passive referencing (from SW 5.1)” ––> via the PROFIBUS control signal QZsw.1 or ZSW1.15” E Siemens AG 2005 All Rights Reserved 5-316 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 317: Setpoint Assignment In The Subscriber
Setpoints in the subscriber (bytes) STW1 NSOLL_B NSOLL_B Actual value telegram STW2 from the publisher (bytes) MomRed P0915, P0922 Fig. 5-31 Example, setpoint assignment E Siemens AG 2005 All Rights Reserved 5-317 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 318: Activating/Parameterizing Slave-To-Slave Communications
ChkCfg. Structure of the empty ID for Drive ES Basic (S7 ID format): 0x04 0x00 0x00 0xD3 0x40 E Siemens AG 2005 All Rights Reserved 5-318 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 319
Publisher DP address 1) Data in bytes 2) Calculated from the version ID Fig. 5-32 Filter block in the parameterizing telegram (SetPrm) E Siemens AG 2005 All Rights Reserved 5-319 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 320: Telegram Structure
Fig. 5-33. Most of the control words are ent- ered from the PROFIBUS–DP master; whereas, the actual setpoints/ reference values are sent from a ”SIMODRIVE 611 universal” as master drive. Setpoint telegram from the master (bytes) Setpoints in the ”SIMODRIVE 611…
-
Page 321
In this case, it is necessary that the appropriate telegram is configured us- ing P0915 and P0888 is assigned the function numbers for the hardware limit switch. E Siemens AG 2005 All Rights Reserved 5-321 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 322
Hardware limit switch minus P0915:5 = 50111 P0888:0 = 81 P0888:1 = 82 Fig. 5-34 Example, mixed operation for the control signals E Siemens AG 2005 All Rights Reserved 5-322 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 323: Example: Coupling 2 Drives (Master, Slave Drive)
– 10 words, actual values to the DP master (inconsistent) – 10 words, setpoints from the DP master (inconsistent) Fig. 5-35 Example, configuring the master drive for S7 E Siemens AG 2005 All Rights Reserved 5-323 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 324
Clock cycle synchronization ––> applicable for the master and slave drives Fig. 5-37 Example, clock cycle synchronization for configuring S7 DP cycle 4 ms E Siemens AG 2005 All Rights Reserved 5-324 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 325
For example, actual values (sent data) for PZD 18 (XsollP_H) in the master drive (Fig. 5-38) must match the setpoint/reference value (received data) for PZD 18 (Xext_H) in the slave drive (Fig. 5-39). E Siemens AG 2005 All Rights Reserved 5-325 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 326
Max. traversing distance which @ P0896 can be represented: P0895 Optional: Inverting the external position reference value using P0897 Fig. 5-39 Parameterization, slave drive E Siemens AG 2005 All Rights Reserved 5-326 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 327
––> P0401 and P0402 (e.g. 1) Fig. 5-40 Parameterizing the couplings The DP master must set control word PosStw.4 in order to activate the coupling. E Siemens AG 2005 All Rights Reserved 5-327 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 328
5 Communications via PROFIBUS DP 08.99 5.10 Slave–to–slave communications (from SW 4.1) Space for your notes E Siemens AG 2005 All Rights Reserved 5-328 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 329
……6-533 E Siemens AG 2005 All Rights Reserved 6-329 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 330
……. . . 6-604 6.16 Rotor position synchronization/rotor position identification … . . 6-614 E Siemens AG 2005 All Rights Reserved 6-330 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 331
Fig. 6-3 Positioning drive using a higher–level open–loop control, position actual value generation via a direct measuring system E Siemens AG 2005 All Rights Reserved 6-331 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 332: Operating Mode, Speed/Torque Setpoint (P0700 = 1)
Induction motor/1FE1 motor flux sensing and closed–loop flux control Synchronous motor without 1FE1 motor (P1113) q set d set Fig. 6-4 Current and speed control E Siemens AG 2005 All Rights Reserved 6-332 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 333
Detailed information regarding the current and speed control loop are included in: Reference: /FBA/ SIMODRIVE 611D/SINUMERIK 840D/810D Description of Functions, Drive Functions E Siemens AG 2005 All Rights Reserved 6-333 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 334: Ramp-Function Generator
Max. permissible actual speed for synchronous motors: Minimum from 1.1 S P1400 and P1147 (from SW 7.1 1.05 S P1400 and P1147 with ”SIMODRIVE 611 universal HR”, resolver) Max. permissible actual speed for induction motors: Minimum from P1146 and P1147 Max.
-
Page 335
P1426 must be used in order to clearly identify the start of a new ramp–up operation. Fig. 6-5 Signal characteristics for the ramp–function generator E Siemens AG 2005 All Rights Reserved 6-335 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 336: Optimizing The Closed-Loop Current And Speed Controller
In order to be able to fully utilize the dynamic performance of the drive including the mechanical system, some post–optimization will be nec- essary. Optimizing using the ”SimoCom U” tool The controller setting for ”SIMODRIVE 611 universal” can be auto- matically executed using the ”SimoCom U” tool (only in online oper- ation). Call: Press the ”Execute automatic controller setting”…
-
Page 337
When optimizing, e.g. linear drives, it may be necessary to set the current and speed setpoint filters. This procedure is described in: Reference: /FBA/ SIMODRIVE 611D/SINUMERIK 840D/810D Description of Functions, Drive Functions E Siemens AG 2005 All Rights Reserved 6-337 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 338: Speed Controller Adaptation
(P1411 < n or v < P1412) Constant upper speed range (n or v > P1412) Fig. 6-6 Adaptation of the speed controller parameters using the characteristic E Siemens AG 2005 All Rights Reserved 6-338 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 339
1412 Upper adaptation speed (SRM, ARM) Upper adaptation velocity, motor (SLM) m/min 100 000.0 ately … defines the upper threshold for adaptation. E Siemens AG 2005 All Rights Reserved 6-339 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 340: Fixed Speed Setpoint (From Sw 3.1)
2. Parameterize the input terminals (refer to Chapters 6.4.2 and 6.4.3) 3. Parameterize the output terminals (refer to Chapters 6.4.5 and 6.4.6) 4. Check the function E Siemens AG 2005 All Rights Reserved 6-340 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 341: Monitoring Functions
Note The temperature monitoring functions of the motor, set using P1602 or P1607, are then no longer effective. E Siemens AG 2005 All Rights Reserved 6-341 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 342
PLC. The temperature monitoring functions of the motor, set using P1602 and P1603 or P1607, are then no longer effective. E Siemens AG 2005 All Rights Reserved 6-342 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 343
608 (speed controller output limited) can be output. Note: For PE spindles (P1015 = 1), the standard assignment is the same as for ARM (30.0 RPM). E Siemens AG 2005 All Rights Reserved 6-343 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 344
The shutdown response to fault 616 can be configured using P1613 bit 16 or 17. If the standard value is entered in P1162/P1163, then the appropriate monitoring is inactive. E Siemens AG 2005 All Rights Reserved 6-344 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 345
06.04 6 Description of the Functions Operating mode, speed/torque setpoint (P0700 = 1) Hardware When using ”SIMODRIVE 611 universal” with a higher–level control, it limit switch can occur that for coordinate transformation, e.g. shifting and rotating (HW limit switch) the tool, that the software limit switches cannot be activated/evaluated (from SW 8.1) -
Page 346: Limits
How is the speed limiting calculated? Motor type Interdependencies Minimum (P1147, 1.2 S P1400) SRM: ARM, SLM, PE spindle: Minimum (P1147, P1146) E Siemens AG 2005 All Rights Reserved 6-346 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 347
When commissioning the system for the first time and for ”calculate unlisted motors”, the param- eter is pre–assigned as follows: 1.1 S P1400 1.05 S P1400 (from SW 7.1 with ”SIMODRIVE 611 universal HR”, resolver) ARM, SLM, PE spindle P1146 Speed actual value >… -
Page 348
Constant P1237 torque Constant power range range Speed n Stall Rated speed n rated P1148 Fig. 6-7 Limiting the torque setpoint E Siemens AG 2005 All Rights Reserved 6-348 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 349
If the motor is overloaded for a longer period of time, this can result in an impermissible temper- ature rise (the drive is shutdown as a result of a motor overtemperature condition); the motor can also be destroyed. E Siemens AG 2005 All Rights Reserved 6-349 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 350
2 (terminal 24.x/20, refer to Chapter 6.6.4). for PROFIBUS–DP: using the ”MomRed” control word (refer to Chapter 5.6.6). E Siemens AG 2005 All Rights Reserved 6-350 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 351
… specifies the maximum permissible motor current referred to the maximum motor current (P1104). The parameter is pre–set at the first start–up and for ”Calculate unlisted motor”: P1105 = (P1122/P1104) S 100 % SRM: E Siemens AG 2005 All Rights Reserved 6-351 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 352: Position Measuring System With Distance-Coded Reference Marks (From Sw 4.1)
Direct measuring system (DM) – P1037.7 = 1 (DM configuration, encoder) ––> distance–coded reference scale – P1052 or P1053 ––> distance–coded reference scale E Siemens AG 2005 All Rights Reserved 6-352 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 353: Positioning Mode (P0700 = 3, From Sw 2.1)
(incremental) (refer to Chapter 6.2.9). Monitoring functions Dynamic following error monitoring, positioning monitoring, standstill monitoring, hardware/software limit switches E Siemens AG 2005 All Rights Reserved 6-353 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 354: Encoder Adaptation
The ”SIMODRIVE 611 universal” drive calculates the ratio between the travel and the encoder increments from this data, which means that motion on the load side can be determined. Linear axis with…
-
Page 355
A modular rotary axis is set via the following parameters: without/with P0241 Activates the modulo conversion, rotary axis modulo correction (from SW 2.4) P0242 Modulo range, rotary axis E Siemens AG 2005 All Rights Reserved 6-355 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 356
––> max. revolutions in P1021 (e.g. 4096) Absolute value Note: dlessly encoders The same restrictions apply as for linear axes and rotary absolute value rotating encoders. E Siemens AG 2005 All Rights Reserved 6-356 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 357
DC link charging and the decrease in the DC link voltage are shown as linear characteristics. link P1164 P1162 Monitoring Save active E Siemens AG 2005 All Rights Reserved 6-357 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 358
As long as the signals were still not available at terminals 48 and 63 of the NE module, the electronics power supply of the control board can be shut down again after run–up. E Siemens AG 2005 All Rights Reserved 6-358 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 359
The spindle pitch is specified in this parameter (e.g. ballscrew spindle with 10 mm/revolution and metric dimension system ––> P0236 = 10 000 MSR/rev). 0237:8 Encoder revolutions 8 388 607 – E Siemens AG 2005 All Rights Reserved 6-359 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 360
These fluctuations can occur, e.g. when the drive regenerates into the DC link. E Siemens AG 2005 All Rights Reserved 6-360 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 361: Units For Travel, Velocity And Acceleration
– Acceleration has the units [mm/s The units for the various dimension systems (mm, inch or degrees) can be listed in the following tables using specific examples. E Siemens AG 2005 All Rights Reserved 6-361 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 362
––> 243.7 inch/s 1) The units are specified as follows in the parameter list (refer to Chapter A.1): [c * MSR/min], c = 1 E Siemens AG 2005 All Rights Reserved 6-362 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 363
––> 24 degrees/s 1) The units are specified as follows in the parameter list (refer to Chapter A.1): [c * MSR/min], c = 10 E Siemens AG 2005 All Rights Reserved 6-363 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 364: Closed-Loop Position Control Components
Standstill monitoring time P0231 Position act. value inversion P0326 Standstill window P0232 Position ref. value inversion Fig. 6-12 Closed–loop position control components E Siemens AG 2005 All Rights Reserved 6-364 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 365
(refer to the following warning information). If, after ”SIMODRIVE 611 universal” has been first commissioned, it is still necessary to changeover the dimension system setting from mm to inch, then the following steps must be executed: 1. -
Page 366
… indicates the currently active dimension system. Note: If it is identified at POWER ON that P0100 0 is P0101, then a dimension system changeover is automatically made. E Siemens AG 2005 All Rights Reserved 6-366 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 367
The maximum acceleration/deceleration is a step function. The effective acceleration or deceleration can be set in the traversing block using an override (P0083:64 or P0084:64). E Siemens AG 2005 All Rights Reserved 6-367 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 368
Note: The jerk is internally limited to the appropriate jerk time of 200 ms. P0103 Maximum acceleration P0104 Maximum deceleration P0107 –P0107 E Siemens AG 2005 All Rights Reserved 6-368 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 369
1) Prerequisites: There is a metric linear axis (dimension system P0100 = 1 ––> 1000 MSR = 1 mm) E Siemens AG 2005 All Rights Reserved 6-369 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 370
For analog input, terminal 56.x/14.x, in addition the following parameters are effective (refer to Chapter 6.6): P0608 Inversion, terminal 56.x/14.x P0609 Smoothing time, terminal 56.x/14.x P0610 Offset correction, terminal 56.x/14.x E Siemens AG 2005 All Rights Reserved 6-370 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 371
– Fault 141 Plus hardware limit switch The jogging key is inhibited in the direction of motion The traversing block is exited E Siemens AG 2005 All Rights Reserved 6-371 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 372
The status of a software limit switch is displayed using the following signals (refer to Chapter 6.4.5): ”Minus software limit switch actuated” output signal ”Plus software limit switch actuated” output signal E Siemens AG 2005 All Rights Reserved 6-372 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 373
– Move away, with the traversing block in the opposite direction to the approach direction E Siemens AG 2005 All Rights Reserved 6-373 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 374
The minus and plus positions for the software limit switches are set using these parameters. Note: The following applies: P0315 (minus software limit switch) < P0316 (plus software limit switch) E Siemens AG 2005 All Rights Reserved 6-374 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 375
P0311 (cam switching position 2) ––> cam switching signal 2 Note: Also refer under the index entry ”Output signal, cam switching signals 1 and 2” E Siemens AG 2005 All Rights Reserved 6-375 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 376
––> the table doesn’t travel far enough ––> the table travels too far ––> positive backlash (standard case) ––> negative backlash Fig. 6-14 Positive and negative backlash compensation E Siemens AG 2005 All Rights Reserved 6-376 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 377
= 1 ––> Negative direction = 0 ––> Positive direction = 1 ––> No reference cams used = 0 ––> Reference cams used E Siemens AG 2005 All Rights Reserved 6-377 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 378
System deviation, position controller input P0031 Actual Kv factor (position loop gain) Refer under the index entry ”Diagnostics of the motion status” E Siemens AG 2005 All Rights Reserved 6-378 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 379
Chapter 7.4.2). With the trace function, the approach characteristics of the axis can be zoomed in using the appropriate scaling and then evaluated. E Siemens AG 2005 All Rights Reserved 6-379 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 380
Average value filter, speed setpoint filter on (standard) Disadvantage: Delay in the position control loop by half a position controller clock cycle. Average value filter, speed setpoint off E Siemens AG 2005 All Rights Reserved 6-380 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 381
Positive motor speed ––> the position is increased (positive position count direction) Note: The position controller control sense is not influenced, i.e. it is internally taken into consider- ation. E Siemens AG 2005 All Rights Reserved 6-381 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 382
(e.g. load surges). Dynamic following error monitoring is de–activated The dynamic following error monitoring is active with this value E Siemens AG 2005 All Rights Reserved 6-382 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 383
The standstill monitoring function is disabled, if a new traversing block is started Tracking mode is selected The standstill window has the value zero (P0326 = 0) E Siemens AG 2005 All Rights Reserved 6-383 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 384
The following is valid when setting the standstill and positioning monitoring: Standstill monitoring time v positioning monitoring time (P0325 v P0320) Standstill window w positioning window (P0326 w P0321) E Siemens AG 2005 All Rights Reserved 6-384 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 385
The following output signals are available (description, refer under the index entry ”Output signal…”): Output signal, ”setpoint static” Output signal, ”reference position reached” E Siemens AG 2005 All Rights Reserved 6-385 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 386
The lower that this tolerance is selected, then the longer positioning takes. It also takes that much longer until the next traversing block can be executed. E Siemens AG 2005 All Rights Reserved 6-386 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 387
All additional axis movements start at the reference position, which was available before the controller enable was withdrawn. E Siemens AG 2005 All Rights Reserved 6-387 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 388
P0031 Actual Kv factor (position loop gain) Reader’s note The parameters are displayed and described in the parameter list is Chapter A.1. E Siemens AG 2005 All Rights Reserved 6-388 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 389: Referencing And Adjusting
Positioning mode (P0700 = 3, from SW 2.1) 6.2.4 Referencing and adjusting Definitions In order that the ”SIMODRIVE 611 universal” drive precisely identifies the machine zero point after power–on, the axis measuring system must be synchronized with the machine. This synchronization is realized when referencing incremental measur- ing systems or adjusting absolute measuring systems.
-
Page 390
After the reference point approach has started, it is considered as having been completed with ”travel to the reference cam”. It continues with the ”synchronization with the zero pulse”. E Siemens AG 2005 All Rights Reserved 6-390 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 391
P0167 = 0 (no inversion) or 1/0 edge ––> (standard) NC contact a 1/0 edge P0167 = 1 (inversion) or 0/1 edge ––> E Siemens AG 2005 All Rights Reserved 6-391 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 392
2 zero pulses is located in the Distance P0172 between 2 zero pulses Fig. 6-21 Adjusting the reference cam E Siemens AG 2005 All Rights Reserved 6-392 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 393
”axis with reference cams” (P0173 = 0)” 2. Travel to the reference point (phase 3, refer to ”axis with reference cam (P0173 = 0)” E Siemens AG 2005 All Rights Reserved 6-393 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 394
P0162 (reference point offset) P0160 (reference point coordinate) P0161 (stopping for marks) 1) When referencing (homing), the act. position is not displayed in SimoCom U. E Siemens AG 2005 All Rights Reserved 6-394 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 395: Referencing With A Distance-Coded Measuring System (From Sw 8.3)
The approach direction for reference point approach is defined using P0166. The reference point approach is executed in 2 phases (refer to the table 6-34): E Siemens AG 2005 All Rights Reserved 6-395 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 396
Standard setting when referencing with distance–coded measuring (new system: commissioning) ––> P0173 = 1: ”Referencing without cams” E Siemens AG 2005 All Rights Reserved 6-396 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 397
(refer under the index entry ”Output signal, digital – …) – Output signal ”Reference point set/no reference point set” ––> using an output terminal with function number 61 E Siemens AG 2005 All Rights Reserved 6-397 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 398
P1054 IM difference for distance–coded rotary encoders (from SW 8.3) P1055 DM difference for distance–coded rotary encoders (from SW 8.3) E Siemens AG 2005 All Rights Reserved 6-398 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 399: Adjusting Absolute Measuring Systems
P0239 = 1: For a parameter set changeover, it is only necessary to adjust the encoder if the mechanical ratio of P0237/P0238 has been changed. E Siemens AG 2005 All Rights Reserved 6-399 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 400
FEPROM and HW–RESET) and the operator is prompted to: Save parameters in the ”FEPROM” carry out a ”HW–RESET” 4. Test: Is the actual value correctly displayed after power–on? E Siemens AG 2005 All Rights Reserved 6-400 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 401: Parameter Overview For Referencing/Adjustments
The axis traverses with this velocity between synchronizing with the first zero pulse (reference zero pulse) and reaching the reference point. E Siemens AG 2005 All Rights Reserved 6-401 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 402
Note: When a fault condition occurs, the axis remains stationary and fault 160 is signaled (reference cam not reached). E Siemens AG 2005 All Rights Reserved 6-402 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 403
Note: The equivalent zero mark is identified, depending on the direction (refer under the index entry ”Input signal – equivalent zero mark”). E Siemens AG 2005 All Rights Reserved 6-403 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 404
Fault 508 (zero mark monitoring, motor measuring system) is signaled. Note: This monitoring is only activated if P1050/P1024*1000 can either be divided by 16 or by 10. E Siemens AG 2005 All Rights Reserved 6-404 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 405
µm 500 000 coders (from SW 8.3) …specifies the distance between two reference marks for distance–coded encoders, direct mea- suring system. E Siemens AG 2005 All Rights Reserved 6-405 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 406: Jogging Operation
Fixed setpoint, jogging 1: P0108 Accelerating and braking along the maximum acceleration/deceleration characteristic (P0103/P0104) Fixed setpoint, jogging 2: P0109 Fig. 6-23 Accelerating and braking when jogging E Siemens AG 2005 All Rights Reserved 6-406 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 407
– Input signal, ”incremental jogging ” (from SW 4.1) ––> using an input terminal with function number 61 ––> via the PROFIBUS control signal ”PosStw.5” E Siemens AG 2005 All Rights Reserved 6-407 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 408: Programming Traversing Blocks
COUPLING_IN/COUPLING_OUT (from SW 3.3) +: Block number, mode Command parameters 86:0 86:1 86:63 Additionally required information to execute the command is specified here. E Siemens AG 2005 All Rights Reserved 6-408 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 409
1: CONTINUE WITH BLOCK 0: Traversing STOP 1: RELATIVE block running 2: CONTINUE FLYING 2: ABS_POS 1: PROFIBUS 3: CONTINUE EXTER- 3: ABS_NEG E Siemens AG 2005 All Rights Reserved 6-409 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 410
Only possible for rotary axis with modulo correction This information must be specified for this command This information can be specified –: This information is not relevant E Siemens AG 2005 All Rights Reserved 6-410 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 411
–1 –1 –1 –1 –1 –1 P0080 P0081 P0088 before after reformatting reformatting E Siemens AG 2005 All Rights Reserved 6-411 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 412
If, when selecting the traversing block, it is identified that the traversing range has been violated, then an appropriate fault signal is output. E Siemens AG 2005 All Rights Reserved 6-412 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 413
… specifies which override is effective at the maximum deceleration (P0104). P0084:x = P0104 @ x: Space retainer in the block memory brake, act 100 % E Siemens AG 2005 All Rights Reserved 6-413 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 414
This means, that the signals are exclusively influenced using the SET_O/RESET_O commands. When starting or exiting the program, the output signals may possibly have to be ”programmed” in an initial status. E Siemens AG 2005 All Rights Reserved 6-414 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 415
Rotary drive: 1 – 65 535 [0.01 Nm] Linear drive: 1 – 65 535 [N] Note: The command–dependent required block information is listed in the Table 6-37. E Siemens AG 2005 All Rights Reserved 6-415 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 416
Travel to 30 Position = –10 Travel through 10 negative Position = –10 Travel to –10 Position = +10 Travel through 10 positive E Siemens AG 2005 All Rights Reserved 6-416 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 417
For pure single block operation, i.e. each block must be individually selected and started At the last block of a block sequence, i.e. the block identifies the end of the block se- quence. E Siemens AG 2005 All Rights Reserved 6-417 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 418
Note: For traversing blocks whose distance is able to be travelled through within an IPO clock cycle, then the drive brakes briefly. E Siemens AG 2005 All Rights Reserved 6-418 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 419
If P0110 q 2, then input terminal I0.x or I0.B may not be used as input, as, for these, the block change can be initiated from different signal edges. E Siemens AG 2005 All Rights Reserved 6-419 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 420
For the ”Spindle positioning” function, the target position is programmed in P0081 or trans- ferred via PROFIBUS–DP. Note: Refer under the index entry ”Spindle positioning” E Siemens AG 2005 All Rights Reserved 6-420 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 421: Starting, Interrupting And Exiting Traversing Blocks
Reader’s note Generally, input/output signals are used in the following. The following is true when viewed from ”SIMODRIVE 611 universal”: for input signals: – when entered via terminals –> input terminal signals – when entered via PROFIBUS–DP –> control signals for output signals: –…
-
Page 422
Fig. 6-25 Sequentially starting individual blocks Note The selection and the status of the block selection are not binary–coded, but represented, simplified as value. E Siemens AG 2005 All Rights Reserved 6-422 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 423
End of positioning Fig. 6-26 Characteristics of an intermediate stop of a traversing block E Siemens AG 2005 All Rights Reserved 6-423 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 424
”Reference position reached” is not set. Selecting and starting an additional (or the same) traversing block End of positioning Fig. 6-27 Characteristics when aborting a traversing block E Siemens AG 2005 All Rights Reserved 6-424 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 425
Actual traversing block – deceleration override P0006 Actual traversing block – command P0007 Actual traversing block – command parameter P0008 Actual traversing block – mode E Siemens AG 2005 All Rights Reserved 6-425 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 426: Mdi Operation (From Sw 7.1)
2) A new positioning operation is started without the MDI end position having been reached. Fig. 6-28 Control and status signals for MDI E Siemens AG 2005 All Rights Reserved 6-426 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 427
”operating condition/intermediate stop” are effective just the same as in the normal ”positioning” operating mode. The monitoring functions, e.g. software and hardware switches are also active. E Siemens AG 2005 All Rights Reserved 6-427 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 428
MDI block The input signal ”reject traversing task” deletes the programmed MDI influence block. The input signal ”intermediate stop” holds the MDI block. E Siemens AG 2005 All Rights Reserved 6-428 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 429
Image, input signals, Part 3 P0657 Image, output signals, Part 2 P0915:17 PZD setpoint assignment, PROFIBUS P0916:17 PZD actual value assignment, PROFIBUS P0922 Telegram selection PROFIBUS E Siemens AG 2005 All Rights Reserved 6-429 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 430
– Output signal ”external block change” (this is an image of the input signal ”external block change”) ––> using an output terminal with function number 67 ––> using the PROFIBUS status signal ”AktSatz14” E Siemens AG 2005 All Rights Reserved 6-430 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 431: Axis Couplings (From Sw 3.3)
Beyond the output of these signals, the master drive is parameterized as a conventional positioning drive (”Positioning” mode, P0700 = 3). E Siemens AG 2005 All Rights Reserved 6-431 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 432
Xext (slave drive) can be parameterized using a numerator/denomina- tor pair This means that not only is a coupling possible between ”SIMODRIVE 611 universal” drives, but also with other bus nodes (DP master or DP slave). When the interface is switched–in, the drive responds to absolute posi- tion reference values which are entered via the angular incremental encoder interface, switched as input, or PROFIBUS–DP. -
Page 433
Required, if autonomous or superimposed motion has to be executed via mental measuring sys- traversing blocks tems ––> Refer to Chapter 6.2.4 Available in the operating ”Positioning” (P0700 = 3) mode E Siemens AG 2005 All Rights Reserved 6-433 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 434
Operating mode P0890 Activates the angular incr. enc./encoder interface P0891 Source, external position reference value Fig. 6-30 Internal position actual value coupling E Siemens AG 2005 All Rights Reserved 6-434 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 435
P0700 Operating mode P0891 Source, external position reference value (only P0891 = 4 possible) Fig. 6-32 Synchronous coupling between several DP slaves E Siemens AG 2005 All Rights Reserved 6-435 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 436
SimoCom U, the telegrams. E Siemens AG 2005 All Rights Reserved 6-436 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 437
The external position reference value can be inverted using P0897. value inversion Note Changes to P0897 are incorporated in P0032 (external position reference value). E Siemens AG 2005 All Rights Reserved 6-437 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 438
”setpoint, master drive” on the slave drive side. Note A ”SIMODRIVE 611 universal” as slave drive also operates with PROFIBUS master drives together which do not support the concept of multiple correction value transfer. The only thing that is necessary, is that, for a setpoint step, the control bit and the correction value are correctly set. -
Page 439
166 is always output (not that traversing block with COUPLING_IN or with COUPLING_OUT). E Siemens AG 2005 All Rights Reserved 6-439 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 440
Position synchronism via traversing block ––> refer to Fig. 6-34 – P0410 = 8 Absolute position (from SW 4.1) ––> refer to Fig. 6-35 E Siemens AG 2005 All Rights Reserved 6-440 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 441
Speed setpoint, slave drive Fig. 6-33 Speed synchronism (P0410 = 1 or 3) Reader’s note The phases are described in Table 6-40. E Siemens AG 2005 All Rights Reserved 6-441 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 442
Reader’s note The phases are described in Table 6-40. E Siemens AG 2005 All Rights Reserved 6-442 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 443
”set setpoint, master drive” as only then can be guaranteed that the slave drive has been correctly referenced. ––> refer to the example, Chapter 5.10.5 E Siemens AG 2005 All Rights Reserved 6-443 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 444
Offset, synchronous velocity Fig. 6-35 To absolute position (P0410 = 7 or Reader’s note The phases are subsequently described in Table 6-40. E Siemens AG 2005 All Rights Reserved 6-444 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 445
For coupling–in/out via input signal, the braking phase may only be initiated, if a tra- versing program is no longer running for the slave drive. E Siemens AG 2005 All Rights Reserved 6-445 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 446
After synchronism has been established, additional commands can be executed (e.g. to machine the workpiece). For the commands, the same conditions apply as for the program- mable couplings. E Siemens AG 2005 All Rights Reserved 6-446 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 447
(FA) Master drive P0420 Slave drive –s Waiting position Fig. 6-36 Application example: Coupling via an input terminal with queue functionality E Siemens AG 2005 All Rights Reserved 6-447 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 448
(encoder), e.g. for ––> a good resolution: 2048 pulses correspond to 10 mm ––> a poor resolution: 1250 pulses correspond to 1500 mm E Siemens AG 2005 All Rights Reserved 6-448 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 449
(refer to Chapter 6.4.3 Function numbers 72 and 73) The following applies for P0410 = 3, 4 or 8: The coupling cannot be switched–in/switched–out via an input signal. E Siemens AG 2005 All Rights Reserved 6-449 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 450
If a setpoint source is selected, which is not available for the drive, e.g. there is no optional PROFIBUS–DP module, then Fault 788 is output. E Siemens AG 2005 All Rights Reserved 6-450 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 451
For coupled operation via PROFIBUS–DP, we recommend that internal couplings are not used. Instead, the second drive should be parameterized as subscriber (refer to Chapter 5.10). E Siemens AG 2005 All Rights Reserved 6-451 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 452
”in synchronism” P0160 Reference point coordinates P0162 Reference point offset Fig. 6-37 Sequence when passively referencing (master and slave drive with incremental encoder) E Siemens AG 2005 All Rights Reserved 6-452 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 453
If the slave drive with incremental encoder does not have any refer- ence cams, then it must be referenced using the ”set reference point” input signal. E Siemens AG 2005 All Rights Reserved 6-453 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 454
For master and slave drive with absolute value encoder, passive referencing is not practical, as the axes have been adjusted corre- sponding to Chapter 6.2.7 (Adjustment for absolute measuring sys- tems). E Siemens AG 2005 All Rights Reserved 6-454 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 455
P0413. The value from P0160 is then ac- cepted as new actual value. ––> Refer under the commissioning help for passive referencing of the slave drive E Siemens AG 2005 All Rights Reserved 6-455 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 456
69 (refer to Chapter 6.4) ––> using the PROFIBUS control signal QStw.1 (refer to Chapter 5.6.2) E Siemens AG 2005 All Rights Reserved 6-456 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 457
P0896 Ext. position reference value – No. of dimension system grids P0897 Inversion, external position reference value P0898 Modulo range, master drive E Siemens AG 2005 All Rights Reserved 6-457 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 458
(refer under the index entry, ”Output signal, digital – …”) – Output signal, ”controller enable status” – Output signal ”fault present” – Output signal, ”warning present” E Siemens AG 2005 All Rights Reserved 6-458 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 459: Handling Faults In The Master And Slave Drives
The required stop response can be initiated for a group of axes by appropri- ately externally evaluating the output signals of the slave drive. E Siemens AG 2005 All Rights Reserved 6-459 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 460
On the other hand, for a setpoint coupling, it should be ensured that when the setpoints fail, the group of axes is correctly stopped. E Siemens AG 2005 All Rights Reserved 6-460 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 461: Torque Setpoint Coupling (From Sw 4.1)
(refer to Chapter 6.6), there is a longer dead time (w 1 ms instead of the speed controller clock cycle). E Siemens AG 2005 All Rights Reserved 6-461 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 462
E Siemens AG 2005 All Rights Reserved 6-462 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 463
– 5 words, actual values to the DP master – 5 words, setpoints from the DP master – 1 word, setpoints via slave–to–slave communications E Siemens AG 2005 All Rights Reserved 6-463 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 464
Msoll Actual point P0916 P0916 P0916 P0916 P0916 P0916 50002 50008 50008 50004 50102 50114 Fig. 6-44 Configuring the telegram, master drive E Siemens AG 2005 All Rights Reserved 6-464 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 465
Normalization, torque setpoint P1242:8 Offset, torque setpoint (open–loop torque–controlled) P1243:8 Normalization, torque/power reduction P1252 Transition frequency, torque setpoint smoothing P1725 Normalization, torque setpoint E Siemens AG 2005 All Rights Reserved 6-465 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 466
– Output signal ”smoothed torque setpoint” ––> using the PROFIBUS status signal ”Msoll” – Output signal ”smoothed torque–generating current Iq” ––> using the PROFIBUS status signal ”IqGl” E Siemens AG 2005 All Rights Reserved 6-466 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 467: Equalization Controller (From Sw 7.1)
– – Þ = k qact Þ : magn. flux Þ = torque constant Fig. 6-46 Closed–loop control structure, equalization controller E Siemens AG 2005 All Rights Reserved 6-467 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 468
This then enters a high supplementary setpoint. Note When the equalization controller is activated, induction motors cannot be changed–over! E Siemens AG 2005 All Rights Reserved 6-468 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 469
Parameterization of P0626, P0625, P0612, P0619 P1490 = 2 ––> Equalization controller is active The source is the adjacent drive (drive A or B) E Siemens AG 2005 All Rights Reserved 6-469 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 470
In order to achieve a softer transition between these times slices, the setpoint steps (jumps) can be smoothed using a speed setpoint filter as PT1 system (1 ms time constant). E Siemens AG 2005 All Rights Reserved 6-470 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 471
As the motors move in opposite directions; the direction of rotation is inverted. Fig. 6-50 Setting for the slave axis E Siemens AG 2005 All Rights Reserved 6-471 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 472
When inverting the speed, the sign of the torque weighting should be carefully observed. Fig. 6-52 Inverting the direction of rotation, slave axis E Siemens AG 2005 All Rights Reserved 6-472 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 473: Input/Output Terminals Of The Control Board
If the enable signals are missing, which are required to operate the drive, these can be determined using P0600 (operating display) (refer to Chapter 4.5). E Siemens AG 2005 All Rights Reserved 6-473 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 474: Freely-Parameterizable Digital Input Terminals
35 (ARM) I0.x ately I1.A X451.8 I1.B X452.8 0661 Function, in- 0 (SRM, SLM) – put terminal medi- 7 (ARM) I1.x ately E Siemens AG 2005 All Rights Reserved 6-474 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 475: List Of Input Signals
The bit name is required to control the signal via PROFIBUS–DP (refer to Chapter 5.6.1). Example: STW1.4 ––> that means control word 1, bit 4 E Siemens AG 2005 All Rights Reserved 6-475 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 476
Operating condition/reject traversing task – STW1.4 Operating condition/intermediate stop – STW1.5 Activate traversing task (edge) – STW1.6 Incremental jogging (from SW 4.1) – PosStw.5 E Siemens AG 2005 All Rights Reserved 6-476 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 477
STW1.13 SW 3.1) Motor changed over (from SW 2.4) – – STW2.11 Master sign–of–life (from SW 3.1) – STW2.12 STW2.13 STW2.14 STW2.15 E Siemens AG 2005 All Rights Reserved 6-477 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 478
(P1010). Motor changeover is described in Chapter 6.11. E Siemens AG 2005 All Rights Reserved 6-478 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 479
(P1010). The ”parameter set changeover” function is described in Chapter 6.10. E Siemens AG 2005 All Rights Reserved 6-479 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 480
Low–pass filter is enabled Note: The status of the 1st speed setpoint filter is displayed using the ”first speed setpoint filter inactive” output signal. E Siemens AG 2005 All Rights Reserved 6-480 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 481
The characteristics at power–on again can be defined via P1012.12. P1012.12 = 1 Power–on inhibit for alarm and OFF 2/OFF 3 No power–on inhibit E Siemens AG 2005 All Rights Reserved 6-481 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 482
The drive can be braked as quickly as possible using this signal, i.e. not along the ramp–function genera- tor ramp, but at the torque limit. E Siemens AG 2005 All Rights Reserved 6-482 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 483
This input signal is only evaluated if the brake control is activated using P0850 = 1. In the operating mode, the brake is controlled using P0850 (operating sequence control) and not via this input signal. E Siemens AG 2005 All Rights Reserved 6-483 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 484
––> However, only if the signals are not connected to an input. Also refer to the input signal ”activate traversing task (edge)” E Siemens AG 2005 All Rights Reserved 6-484 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 485
In order to execute traversing blocks, it is no longer necessary to supply this signal. ––> However, only if the signals are not connected to an input. E Siemens AG 2005 All Rights Reserved 6-485 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 486
Select and start a traversing block End of the positioning operation and automatic block change End of the positioning operation and end of program E Siemens AG 2005 All Rights Reserved 6-486 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 487
The drive accelerates to the speed/velocity, parameterized in P0108/P0109 with the ac- celeration set in P0103 (maximum acceleration) Note: For jogging, the software limit switch and the override are effective. E Siemens AG 2005 All Rights Reserved 6-487 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 488
A reference point approach which has been started is interrupted The drive brakes with the deceleration rate specified in P0104 (maximum deceleration). The ”reference point set” output signal remains at ”0”. E Siemens AG 2005 All Rights Reserved 6-488 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 489
If P0110 q 2, then input terminal I0.x or I0.B may not be used as input, as, for these, the block change can be initiated from different signal edges. E Siemens AG 2005 All Rights Reserved 6-489 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 490
The tracking mode status is displayed via the ”tracking mode active” output signal. The tracking mode can also be selected as internal control response to an error. Refer under the index entry ”Tracking mode” E Siemens AG 2005 All Rights Reserved 6-490 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 491
––> refer to the input signal ”activate coupling via I0.x” (function number 73) The position when switching–in the coupling is displayed in P0425:0. The ”axis coupling” function is described in Chapter 6.3. E Siemens AG 2005 All Rights Reserved 6-491 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 492
The reference point coordinates of the master drive are signaled to the slave drive using P0400. The ”axis coupling” function is described in Chapter 6.3. E Siemens AG 2005 All Rights Reserved 6-492 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 493
Starting after the cam and traversing in a negative direction ––> the 0/1 edge at input I0.x is identified as the equivalent zero mark E Siemens AG 2005 All Rights Reserved 6-493 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 494
The function is only available for ”Motion Control with PROFIBUS–DP”. ––> refer under the index entry ”Encoder interface (from SW 3.1)” The function is only available for the control board ”SIMODRIVE 611 universal” from Order No. 6SN1118–xxxxx–0AA2 and control board ”SIMODRIVE 611 universal HR”. -
Page 495
The setpoint at the ramp–function generator input is enabled. 0 signal Inhibit setpoint The setpoint at the ramp–function generator input is set to zero. E Siemens AG 2005 All Rights Reserved 6-495 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 496
Motor y on Selects the required motor data set Signal to ”SIMODRIVE 611 universal”: The pulse enable is internally withdrawn after STW2.11 = 0 The motors are only changed over when the pulses have been canceled (switched–in a no–current condition) Selects the motor corresponding to the motor data set Signal to ”SIMODRIVE 611 universal”: enable the pulses (STW2.11 edge 0 –… -
Page 497
Function generator or measuring function is activated 1/0 signal Function generator or measuring function is de–activated Note: The function generator is described in Chapter 7.4.1. E Siemens AG 2005 All Rights Reserved 6-497 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 498: Permanently-Connected Output Terminals
P0699 is used to define as to whether the output signal is output, in- verted, or not inverted. Notice The terminals may only be parameterized when the drive pulses are canceled. E Siemens AG 2005 All Rights Reserved 6-498 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 499
––> O1.x Example: O2.x are output inverted Note: O4 – O11 are available on the optional TERMINAL module (refer to Chapter 6.5). E Siemens AG 2005 All Rights Reserved 6-499 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 500: List Of Output Signals
The bit name is required to read the signal via PROFIBUS–DP (refer to Chapter 5.6.1). Example: ZSW2.10 ––> that means, status 2 bit 10 E Siemens AG 2005 All Rights Reserved 6-500 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 501
Pulses enabled (from SW 3.1) MeldW.13 Power module current not limited (from SW 3.1) MeldW.10 Control via PROFIBUS (from SW 3.1) ”DIG_OUT” E Siemens AG 2005 All Rights Reserved 6-501 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 502
Suppress fault 608 active (from SW 3.1) – ZSW2.8 Traverse to fixed end stop active (from SW 3.3) – PosZsw.14 External block change (from SW 7.1) – AktSatz.14 E Siemens AG 2005 All Rights Reserved 6-502 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 503
Angular incremental encoder handwheel evaluation, bit – AktSatz.11 0 (from SW 8.1) Angular incremental encoder handwheel evaluation, bit – AktSatz.12 1 (from SW 8.1) E Siemens AG 2005 All Rights Reserved 6-503 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 504
– the speed actual value is within the tolerance bandwidth around the speed setpoint – the delay time has expired (P1427). Note: Detailed information on the ramp–function generator is provided in Chapter 6.1.3. E Siemens AG 2005 All Rights Reserved 6-504 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 505
Fixed hysteresis= 12 RPM (P1417:8) 1 signal | < n 0 signal | > n | < n | > n Application: Speed monitoring E Siemens AG 2005 All Rights Reserved 6-505 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 506
The temperature is outside the possible range. If the excessive temperature remains, then the drive is powered down after approx. 20 s (tripped). E Siemens AG 2005 All Rights Reserved 6-506 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 507
Chapter 6.7 under Table 6-56). If the signal number = 1 (physical address), then the address must be entered into P1620.1 of the address range and in P1622, the address (this is only relevant for Siemens service activi- ties). -
Page 508
To select the motors or motor data sets, input terminal signals are available with function numbers 5 and 6 (motor data set changeover 1st input/2nd input). Motor changeover is described in Chapter 6.11. E Siemens AG 2005 All Rights Reserved 6-508 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 509
1 signal 0 signal Note: When spindle positioning is selected (P0125=1), ZSW1.8 behaves/responds just the same as Fct. No. 58 (positioning mode) E Siemens AG 2005 All Rights Reserved 6-509 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 510
This output signal is used to display whether the speed controller is active and is ready to accept speed setpoints. 1 signal The speed controller is active and setpoints can be accepted 0 signal The speed controller is not active E Siemens AG 2005 All Rights Reserved 6-510 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 511
A motor holding brake can be controlled using an external auxiliary contactor via an output with this func- tion. The brake sequence control is executed in the ”SIMODRIVE 611 universal”. 1 signal The auxiliary contactor for the motor holding brake is energized… -
Page 512
Range without current limiting without current limiting range limiting Note: The ”i t power module limiting” function is described in Chapter A.2. E Siemens AG 2005 All Rights Reserved 6-512 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 513
The drive is not ready to be powered–up. No OFF 2 present/OFF 2 present – ZSW1.4 1 signal No OFF 2 present 0 signal OFF 2 present E Siemens AG 2005 All Rights Reserved 6-513 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 514
The spindle has not reached the target position or alarms 131, 134 and 135 have oc- curred. Note: The ”spindle positioning” function is described in Chapter 6.15 (from SW 5.1). E Siemens AG 2005 All Rights Reserved 6-514 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 515
(from SW 5.1) (P0125=0). For the ”spindle positioning” function (from SW 5.1), the ”ref- erence position reached/outside reference position” signal occupies ZSW1.10 (P0125=1), refer to output signal Function No. 60. E Siemens AG 2005 All Rights Reserved 6-515 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 516
The following functions are not effective for an axis which is not referenced: Software limit switch Backlash compensation Start the traversing blocks E Siemens AG 2005 All Rights Reserved 6-516 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 517
The function of the output signal| n | < n corresponds to this signal. This output signal cannot be used to identify whether the drive is crawling. E Siemens AG 2005 All Rights Reserved 6-517 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 518
During this time, the drive pulses are canceled. 0 signal Otherwise Note: The ”motor changeover for induction motors (from SW 2.4)” function is described in Chapter 6.11. E Siemens AG 2005 All Rights Reserved 6-518 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 519
MDI mode, a new MDI block may now be entered via PZD and/or default block (refer to Chapter 6.2.12). E Siemens AG 2005 All Rights Reserved 6-519 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 520
Note: If the tracking mode is active as internal response to an error/fault, then this is also displayed using this input signal. E Siemens AG 2005 All Rights Reserved 6-520 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 521
The axis does not move forwards or does not move backwards Note: If both signals = ”0”, then no axis movement is active. E Siemens AG 2005 All Rights Reserved 6-521 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 522
P0315) w P0316) actuated (x actuated actuated (x Note: The software limit switches only become active after the axis has been referenced. E Siemens AG 2005 All Rights Reserved 6-522 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 523
”reference point set/no reference point set” and the output signals ”cam switching signals 1,2” (e.g. using an external PLC). The function ”position–related switching signals (cams)” is described in Chapter 6.2.3. E Siemens AG 2005 All Rights Reserved 6-523 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 524
The output signal indicates whether the MDI function is operational. 1 signal The MDI function is active. 0 signal The MDI function is not active. E Siemens AG 2005 All Rights Reserved 6-524 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 525
Ang. incr. enc. hdw. eval. (corresponding to P0900[4]) Bit 0 Bit 1 Note: The ”angular incremental encoder handwheel evaluation” function is described in Chapter 6.8. E Siemens AG 2005 All Rights Reserved 6-525 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 526: Input/Output Terminals For The Optional Terminal Module
Immed. output terminal O6 X432.4 0687 Signaling function – Immed. output terminal O7 X432.5 0688 Signaling function – Immed. output terminal O8 E Siemens AG 2005 All Rights Reserved 6-526 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 527
From SW 4.1, the following applies: For a double–axis module, the input/output terminals can be assigned, blockwise to either drive A or B (P0676, P0696). E Siemens AG 2005 All Rights Reserved 6-527 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 528: Analog Inputs
Analog inputs ! not 611ue ! Analog inputs Description For ”SIMODRIVE 611 universal”, there are two analog inputs for each drive. In the ”speed/torque setpoint” mode, the setpoint can be entered for the following functions via these analog inputs: Speed Speed–controlled operation (n…
-
Page 529: Basic Setting Of The Analog Inputs
E Siemens AG 2005 All Rights Reserved 6-529 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 530
T. 20.x analog (refer to Chapter 6.1.2) Offset P0615 correction Fig. 6-53 Closed–loop speed control via terminal 56.x/14.x and/or terminal 24.x/20.x E Siemens AG 2005 All Rights Reserved 6-530 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 531
Fig. 6-54 Closed–loop speed controlled mode via terminal 56.x/14.x and torque/power reduction via terminal 24.x/20.x Reader’s note The torque/power reduction via terminal 24.x/20.x is described in Chapter 6.6.4. E Siemens AG 2005 All Rights Reserved 6-531 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 532
If the motor still continues to turn even with a speed setpoint of 0 V, and this is not desired, then this parameter can be used to enter a voltage offset to adjust the analog input for zero output. E Siemens AG 2005 All Rights Reserved 6-532 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 533
For the torque/power reduction via terminal 24.x/20.x (refer to Chapter 6.6.4), this parameter 1243 can be used to make adjustments. can be used to make adjustments. 1244 E Siemens AG 2005 All Rights Reserved 6-533 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 534
(terminals). It is not possible to enter a setpoint via PROFIBUS. From SW 4.2: The setpoint for M operation can either be entered via analog inputs (terminals) or PROFIBUS–DP. E Siemens AG 2005 All Rights Reserved 6-534 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 535
Fig. 6-56 Open–loop torque controlled operation via terminal 56.x/14.x and torque/power reduction via terminal 24.x/20.x Reader’s note The torque/power reduction via terminal 24.x/20.x is described in Chapter 6.6.4. E Siemens AG 2005 All Rights Reserved 6-535 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 536
M [Nm] Standard values: P0619 = 10 P1241:8 P1241:8 = M rated ––> at 10 V, M is reached rated U [V] P0619 E Siemens AG 2005 All Rights Reserved 6-536 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 537: Torque/Power Reduction Via Terminal 24.X/20.X
For a wire breakage, a 0 V input voltage becomes effective ––> there is no torque/power ––> this case is suitable for applications which do not require torque under fault/error conditions E Siemens AG 2005 All Rights Reserved 6-537 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 538
50 % to 0 %, referred to max/ P1230/P1235 P1243 P1244 = 2 Note: The actual reduction is displayed in P1717. 10 V P0620 E Siemens AG 2005 All Rights Reserved 6-538 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 539
Reduction is effective, motoring and generating Reduction is only effective motoring In an emergency situation, the axis can still be quickly braked for P1259 = 1. E Siemens AG 2005 All Rights Reserved 6-539 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 540: Application Example Master/Slave
E Siemens AG 2005 All Rights Reserved 6-540 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 541
Function number = 4 (open–loop torque controlled mode) Terminal on the control board ––> refer to Chap. 6.4.2 Terminal on the optional TERMINAL module ––> refer to Chap. 6.5 E Siemens AG 2005 All Rights Reserved 6-541 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 542: Analog Outputs
Resolution of the DAU (D/A converter): 8 bit Voltage range: –10 V to +10 V Update: in the speed controller clock cycle (P1001) E Siemens AG 2005 All Rights Reserved 6-542 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 543
The filter is de–activated with P0632 = 0.0. The following generally applies: low smoothing time ––> low smoothing effect high smoothing time ––> high smoothing effect E Siemens AG 2005 All Rights Reserved 6-543 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 544
P0623 = 200% –> +10 V 8 0.5 n 100 % P0623 = –50% –> –5V 8 n 50 % 0.5 n E Siemens AG 2005 All Rights Reserved 6-544 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 545
Examples: P0625 = 50 % –> +5 V 8 twice the rated torque Note: The output of signal No. 36 is signed. E Siemens AG 2005 All Rights Reserved 6-545 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 546
P0604 8000H 8100% max (M max, Active power – 0.01 kW Rotor flux setpoint – P1712 Rotor flux actual value – P1712 E Siemens AG 2005 All Rights Reserved 6-546 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 547
Absolute velocity actual value m/min (finely normalized) (SLM) Note: P0623 is the reference Utilization (finely normalized) – P1741 Note: P0624 is the reference E Siemens AG 2005 All Rights Reserved 6-547 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 548
(SLM) (from SW 7.1) Reserved – – – – – – – Position controller output (SRM, ARM) – – P1711 P1711 (SLM) m/min E Siemens AG 2005 All Rights Reserved 6-548 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 549
PROFIBUS control word 1 P1788:x – – (STW1) (from SW 5.1) PROFIBUS status word 1 P1789:x – – (ZSW1) (from SW 5.1) E Siemens AG 2005 All Rights Reserved 6-549 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 550
1 (G1_XIST1) (from SW 7.1) PROFIBUS encoder 1 posi- – P1789:x – – tion actual value 2 (G1_XIST2) (from SW 7.1) E Siemens AG 2005 All Rights Reserved 6-550 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 551
3) PROFIBUS signal only supplies a value if it is set in P0615 or P0916. 4) This only applies for spindle positioning E Siemens AG 2005 All Rights Reserved 6-551 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 552
Torque setpoint (SRM, ARM), force setpoint (SLM) Quadrature–axis voltage V Direct–axis voltage V Fig. 6-58 Analog signals for the current and speed control loop E Siemens AG 2005 All Rights Reserved 6-552 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 553
Position actual value Position reference value Velocity setpoint IPO Following error Following error, dynamic model Fig. 6-59 Analog signals for the position control loop E Siemens AG 2005 All Rights Reserved 6-553 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 554
Offset = 0 V Hexadecimal value Shift factor = 2 Fine normalization= 100 % Fig. 6-62 Analog output voltage with overcontrol protection (P0631/P0638 = 1) E Siemens AG 2005 All Rights Reserved 6-554 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 555
Offset = 0 V Hexadecimal value Shift factor = 2 Fine normalization= 100 % Fig. 6-63 Analog output voltage without overcontrol protection (P0631/P0638 = 0) E Siemens AG 2005 All Rights Reserved 6-555 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 556: Angular Incremental Encoder Interface (X461, X462)
––> refer to Chapter 6.8.2 An incremental position reference value can be entered via the in- terface. E Siemens AG 2005 All Rights Reserved 6-556 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 557
Actual value from A internally entered as setpoint for B, from SW 3.3, only drive B) Fig. 6-64 Angular incremental encoder interface for drives A and B: Parameterized using P0890 and P0891 E Siemens AG 2005 All Rights Reserved 6-557 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 558: Angular Incremental Encoder Interface As Output (P0890 = 1)
Note If, from SW 8.1, an induction motor with TTL encoder is connected to ”SIMODRIVE 611 universal HR”, then it is not permissible that the angular incremental encoder interface is used as output. E Siemens AG 2005 All Rights Reserved 6-558 SIMODRIVE 611 universal Description of Functions (FBU) –…
-
Page 559
When using absolute value encoders (EnDat), an absolute value is not transferred via the angular incremental encoder interface, but encoder signals conditioned from ”SIMODRIVE 611 universal”. In order that the zero offset is correctly taken into account, the drive must be stationary while the con- trol board runs–up. -
Page 560
(pulse/direction signal or up/down signal), then a suitable setpoint source, e.g. stepping motor control must be used with exactly the same pulse number as master. In order to couple to SIMODRIVE 611 universal modules, the quadra- ture signal input signal waveform (P0894 = 0) should be used. Parameter… -
Page 561
1 zero pulse/rev x: Space retainer for drive A or B Fig. 6-67 Angular incremental encoder signals for incremental encoders with sin/cos 1Vpp E Siemens AG 2005 All Rights Reserved 6-561 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 562
1:1. E Siemens AG 2005 All Rights Reserved 6-562 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 563: Angular Incremental Encoder Interface As Input (P0890 = 2, From Sw 3.3)
Velocity setpoint 1) From SW 3.3, from SW 4.1, no longer possible. Fig. 6-69 Incremental position reference value via angular incremental encoder interface E Siemens AG 2005 All Rights Reserved 6-563 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 564
Track B* 1 segment Positive setpoint input Negative setpoint input Fig. 6-72 Position reference value entered via the forwards/backwards signal (P0894 = 2) E Siemens AG 2005 All Rights Reserved 6-564 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 565
This means, at this particular instant, the signal frequency may not exceed half of the permissible input limiting frequency. E Siemens AG 2005 All Rights Reserved 6-565 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 566
(refer under the index entry ”Input signal, digital …”) ––> using an input terminal with function number 75 ––> using the PROFIBUS control signal ”PosStw.7” E Siemens AG 2005 All Rights Reserved 6-566 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 567: Electronic Handwheel (From Sw 8.1)
The following should be parameterized: Spindle pitch 10 mm/rev ––> P0236=10.000 Quadrature signal activated ––> P0894=0 Angular incremental encoder handwheel evaluation 10 ––> P0900[1]=10 E Siemens AG 2005 All Rights Reserved 6-567 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 568
Parameter P0891, then fault 167 is output. E Siemens AG 2005 All Rights Reserved 6-568 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 569
Note Compared to the input of control signals via PROFIBUS–DP, the input terminal functions No. 84 to 86 have a higher priority. E Siemens AG 2005 All Rights Reserved 6-569 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 570: Motor Holding Brake
The signal must be connected to the digital output of the master, to which the relay for the motor holding brake is connected. E Siemens AG 2005 All Rights Reserved 6-570 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 571
For pulse enable: Issuing and withdrawing the pulse enable is dependent on several internal and external enable signals (refer to Chapter 6.4.1). E Siemens AG 2005 All Rights Reserved 6-571 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 572
Holding brake Ä Ä Ä Ä Ä Time to open the holding brake Fig. 6-73 Opening the brake: Characteristics when issuing ”controller enable” E Siemens AG 2005 All Rights Reserved 6-572 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 573
Holding brake Ä Ä Ä Ä Time to close the holding brake Fig. 6-74 Closing the brake: Behavior when withdrawing ”controller enable” E Siemens AG 2005 All Rights Reserved 6-573 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 574
Ä Ä Ä Ä Ä Ä Ä Ä Ä Ä Time to close the holding brake Fig. 6-75 Closing the brake: Behavior when withdrawing ”pulse enable” E Siemens AG 2005 All Rights Reserved 6-574 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 575
Motor with holding motor brake holding Output brake O3.A Fig. 6-76 Example: Controlling the motor holding brake via output O3.A E Siemens AG 2005 All Rights Reserved 6-575 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 576: Parameter Set Changeover
Balancing filter, speed pre–control (PT1) 0210:0 0210:1 … 0210:7 x Time constant, position reference value filter 0237:0 0237:1 … 0237:7 x Encoder revolutions E Siemens AG 2005 All Rights Reserved 6-576 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 577
Natural frequency, reference model, velocity (SLM) 1415:0 1415:1 … 1415:7 x Damping, reference model, speed (ARM, SRM) Damping, reference model, velocity (SLM) E Siemens AG 2005 All Rights Reserved 6-577 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 578
Input signal ”parameter set changeover 1st input” Input signal ”parameter set changeover 2nd input” Input signal ”parameter set changeover 3rd input” E Siemens AG 2005 All Rights Reserved 6-578 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 579
The motor is operated, dependent on how input terminal I0.A is energized, using either parameter set 0 or 1. Fig. 6-77 Example: Parameter set changeover E Siemens AG 2005 All Rights Reserved 6-579 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 580: Motor Changeover For Induction Motors (From Sw 2.4)
– one motor – two motors – star/delta operation 1) Encoder changeover is not possible. 2) Only 1 motor can be used with encoder. E Siemens AG 2005 All Rights Reserved 6-580 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 581
! not 611ue ! 6.11 Motor changeover for induction motors (from SW 2.4) Motor data sets For the ”SIMODRIVE 611 universal” control board, there are data sets for a maximum of 4 induction motors. Note The currently effective motor data set is displayed in P0599 (active motor data set). -
Page 582
4246 Hysteresis for speed–dep. Msoll smoothing 1256:8 2256:8 3256:8 4256:8 Ramp–function generator, ramp–up time 1257:8 2257:8 3257:8 4257:8 Ramp–function generator, ramp–down time E Siemens AG 2005 All Rights Reserved 6-582 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 583
Weighting, rotor flux representation 1713 2713 3713 4713 Weighting, torque representation 1725 2725 3725 4725 Normalization, torque setpoint 1) These parameters are read–only. E Siemens AG 2005 All Rights Reserved 6-583 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 584
”Actual motor, 2nd signal” ZSW2.10 STW2.10 ”Motor being changed over” ”Motor changed over” (from SW 3.3) STW2.11 ZSW2.11 Fig. 6-79 Input/output signals: PROFIBUS signals E Siemens AG 2005 All Rights Reserved 6-584 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 585
At a pulse frequency of 8 kHz, only 40–55% of the possible current that is available at 3.2 kHz is available. E Siemens AG 2005 All Rights Reserved 6-585 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 586: Changeover, Max. 4 Motors Each With 1 Data Set (P1013 = 1)
Output terminals 11, 12, 13 and 14 are not controlled, if P1249 = 1. How does a ”SIMODRIVE 611 universal” receives a request for changeover, if the changeover work? signal status at one of the two input terminals for motor data set chan- geover has changed.
-
Page 587
Only necessary for special high–speed motors. Fig. 6-80 Recommended circuit: Changing over 4 motors, each with one motor data set E Siemens AG 2005 All Rights Reserved 6-587 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 588: Changeover, 1 Motor With Max. 4 Data Sets (P1013 = 2)
No. function No. P1xxx P2xxx P3xxx P4xxx 1) The output terminals with function numbers 11 to 14 are not energized. E Siemens AG 2005 All Rights Reserved 6-588 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 589: Changeover, Max. 2 Motors Each With 2 Data Sets (P1013 = 3)
4) Output terminals with function numbers 12 and 14 are not energized. Note Output terminals 11 and 13 are not energized, if P1249 = 1. E Siemens AG 2005 All Rights Reserved 6-589 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 590
P1247 = 700 i.e. 0 < n < 700 ––> motor in the star mode n > 700 ––> motor in the delta mode E Siemens AG 2005 All Rights Reserved 6-590 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 591
Main contactors K1 and K2 must be switched in the no–current condition. If this is not observed, the drive converter and contactors could be destroyed. E Siemens AG 2005 All Rights Reserved 6-591 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 592: Parameters For Motor Changeover
Above P1248 plus 5% hysteresis, the fourth motor data set is selected (P4xxx). Motor data set Motor data set P1xxx P1247 P2xxx P3xxx P1248 P4xxx 5 % 5 % E Siemens AG 2005 All Rights Reserved 6-592 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 593
Recommendation: Motor changeover should be realized using the drive output terminals (P1249 = 0). E Siemens AG 2005 All Rights Reserved 6-593 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 594: Travel To Fixed Endstop (Positioning Mode) (From Sw 3.3)
END, the axis can be re–refer- enced at the fixed endstop using the ”set reference point” function. E Siemens AG 2005 All Rights Reserved 6-594 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 595
P0116:8 (fixed endstop monitoring window) plus the braking ramp. ––> refer to ”fixed endstop” monitoring window E Siemens AG 2005 All Rights Reserved 6-595 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 596
The block change enable is realized as programmed in the block. Note: The block change enable CONTINUE FLYING, behaves just like the block change enable CONTINUE WITH STOP. E Siemens AG 2005 All Rights Reserved 6-596 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 597
The drive remains at the fixed endstop, and can be moved away from it either in the jog mode, or by starting a new traversing block. E Siemens AG 2005 All Rights Reserved 6-597 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 598
A torque offset is en- The weight equalization is not taken into account when tered programming the clamping torque (P1240:8 0 0) E Siemens AG 2005 All Rights Reserved 6-598 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 599
P0115:8 Fixed endstop, maximum following error P0116:8 Fixed endstop, monitoring window Fig. 6-82 Signal timing for the ”travel to fixed endstop” function E Siemens AG 2005 All Rights Reserved 6-599 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 600
– ”Travel to fixed endstop active” output signal ––> using an output terminal with function number 66 ––> using PROFIBUS status signal PosZsw.14 E Siemens AG 2005 All Rights Reserved 6-600 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 601: Teach-In (From Sw 4.1)
= 0: If the block in P0120 or the block selected via the input signals is not available, then fault 183 is output. E Siemens AG 2005 All Rights Reserved 6-601 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 602
The positions with teach–in are only transferred into the RAM memory. Data is manually saved using the ”SimoCom U” parameterizing and start–up tool with ”Save in the drive (FEPROM)”. E Siemens AG 2005 All Rights Reserved 6-602 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 603: Dynamic Servo Control (Dsc, From Sw 4.1)
PROFIBUS telegram is used as speed pre–control value The internal quasi–position controller uses the position actual value from the motor measuring system (G1_XIST1) E Siemens AG 2005 All Rights Reserved 6-603 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 604
When using the DSC function, it only makes sense to use speed set- point filter 1 to support the position controller, e.g. to suppress reso- nance effects. E Siemens AG 2005 All Rights Reserved 6-604 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 605: Spindle Positioning (From Sw 5.1)
When spindle positioning is selected, it is not possible to change over the motor via PROFIBUS–DP. Spindle positioning is not supported in conjunction with the absolute measuring system. E Siemens AG 2005 All Rights Reserved 6-605 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 606
Spindle positioning active P0126 Spindle positioning, zero mark tolerance window P0127 Spindle positioning, setting the internal zero mark P0128 Spindle positioning, offset, zero mark E Siemens AG 2005 All Rights Reserved 6-606 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 607
When the monitoring is disabled via parameters P0318, P0321 and P0326, it should be noted that under fault conditions, the drive can accelerate up to the max. speed. E Siemens AG 2005 All Rights Reserved 6-607 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 608
The position is The new target position is ap- approached in the proached in absolute terms negative direction. and in the negative direction (counter–clockwise). E Siemens AG 2005 All Rights Reserved 6-608 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 609
P0130 Spindle positioning, lowest search velocity P0133 Spindle positioning, max. search velocity P1256 Ramp–function generator, ramp–up time P1257 Ramp–function generator, ramp–down time E Siemens AG 2005 All Rights Reserved 6-609 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 610
– Traverse the spindle to the required position, e.g. manually rotate – Set P0127 to 1. This means that the actual position value is transferred into P0128. P0127 automatically changes to 0. E Siemens AG 2005 All Rights Reserved 6-610 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 611
If the values which are displayed deviate from 360 degrees, then the gear–up/gear– down ratio was not correctly parameterized. E Siemens AG 2005 All Rights Reserved 6-611 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 612
––> setting values with P0320, P0321 ––> using an output terminal with function number 60 ––> using PROFIBUS status signal ”MeldW.14” E Siemens AG 2005 All Rights Reserved 6-612 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 613
”spindle position on” selection must be disabled. P0128 Save the new zero mark (P0652 = 1) Fig. 6-87 Commissioning example, spindle positioning E Siemens AG 2005 All Rights Reserved 6-613 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 614
P0200) Note: Observe the parameter set changeover! Save parameters which have been changed Fig. 6-88 Commissioning example, spindle positioning, continued E Siemens AG 2005 All Rights Reserved 6-614 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 615: Rotor Position Synchronization/Rotor Position Identification
If bit 13 is set (fine position identification), a rotor position identification encoder is executed independently of bit 12. E Siemens AG 2005 All Rights Reserved 6-615 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
-
Page 616
The magnitude of the motion depends on the magnitude of the current and the moment of inertia of the motor and load. E Siemens AG 2005 All Rights Reserved 6-616 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 617
(from SW made with a standard parameterization. 6.1) The noise which is generated should be heard as a sequence of soft surges. E Siemens AG 2005 All Rights Reserved 6-617 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 618
10 degrees is acceptable. If this is not the case, then a higher current must be used for the identification routine (P1019). E Siemens AG 2005 All Rights Reserved 6-618 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 619
……….. . . 7-730 E Siemens AG 2005 All Rights Reserved 7-619 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 620
MINUS key with ”E Removing warnings xxx” Warnings are self–acknowledging, i.e. they automatically reset themselves once the condition is no lon- ger fulfilled E Siemens AG 2005 All Rights Reserved 7-620 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 621
The fault memory must no longer be reset again. E Siemens AG 2005 All Rights Reserved 7-621 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 622
Standstill after the end of a block. STOP VI End of block The drive remains in the closed–loop con- trolled mode. E Siemens AG 2005 All Rights Reserved 7-622 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 623
P1612 and P1613. Refer to Example: Chapter A.1 STOP II should be initiated as response to fault 608. ––> set P1613.8 to 0 E Siemens AG 2005 All Rights Reserved 7-623 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 624
3. This is what it looks like if a warning is present (refer to Fig. 7-3). it involves a warning (code: no hyphen) the warning is assigned to drive A 804: is the warning number E Siemens AG 2005 All Rights Reserved 7-624 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 625
Displays additional faults, sorted according to the sequence that they occurred Switch into the parameterizing mode – Acknowledging faults with RESET FAULT MEMORY Fig. 7-2 Handling several faults E Siemens AG 2005 All Rights Reserved 7-625 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 626
– after one minute – Parameterizing mode Switch into the parameterizing mode – Fig. 7-3 Operator action, if one warning is present E Siemens AG 2005 All Rights Reserved 7-626 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 627
”correctly” inserted lights up the control board is defective E Siemens AG 2005 All Rights Reserved 7-627 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 628
”– – – – – –” is output on the display unit Cause – There is no drive firmware in this memory module. – Remedy, refer to fault 001 E Siemens AG 2005 All Rights Reserved 7-628 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 629
– Load the drive firmware via SimoCom U – Insert the memory module with firmware Acknowledgement POWER ON Stop response STOP II (SRM, SLM) STOP I (ARM) E Siemens AG 2005 All Rights Reserved 7-629 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 630
Supplementary information: only for siemens-internal error diagnostics Remedy – Replace control module Acknowledgement POWER ON Stop response STOP II (SRM, SLM) STOP I (ARM) E Siemens AG 2005 All Rights Reserved 7-630 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 631
Remedy – Check the plug-in connections – Replace control module Acknowledgement POWER ON Stop response STOP II (SRM, SLM) STOP I (ARM) E Siemens AG 2005 All Rights Reserved 7-631 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 632
– Control module and encoder must be the same type (sin/cos or resolver) – Replace control module Acknowledgement POWER ON Stop response STOP II (SRM, SLM) STOP I (ARM) E Siemens AG 2005 All Rights Reserved 7-632 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 633
Check that the control module is correctly inserted in the power section or whether the power section is defective. Acknowledgement POWER ON Stop response STOP II (SRM, SLM) STOP I (ARM) E Siemens AG 2005 All Rights Reserved 7-633 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 634
If this is unsuccessful the control module is defective and must be replaced. Acknowledgement POWER ON Stop response STOP II (SRM, SLM) STOP I (ARM) E Siemens AG 2005 All Rights Reserved 7-634 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 635
P0875 = 0. Acknowledgement POWER ON Stop response STOP II (SRM, SLM) STOP I (ARM) E Siemens AG 2005 All Rights Reserved 7-635 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 636
– Execute POWER ON-RESET (press button R) – Replace option module Acknowledgement POWER ON Stop response STOP II (SRM, SLM) STOP I (ARM) E Siemens AG 2005 All Rights Reserved 7-636 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 637
P0086:64 (command parameter). Remedy Enter value 1, 2 or 3 in P0086:64 (command parameter). Acknowledgement RESET FAULT MEMORY Stop response STOP V E Siemens AG 2005 All Rights Reserved 7-637 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 638
For a linear axes, the positioning mode ABS_NEG was programmed (only for rotary axes). Remedy Change P00987:64/P0097 (mode). Acknowledgement RESET FAULT MEMORY Stop response STOP VI E Siemens AG 2005 All Rights Reserved 7-638 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 639
Reset both input signals, and re-start the required function after the fault has been acknowledged. Acknowledgement RESET FAULT MEMORY Stop response STOP IV E Siemens AG 2005 All Rights Reserved 7-639 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 640
ENDLOS_POS (200 000 000 MSR). Remedy – Acknowledge fault – Move away in the negative direction (e.g. jog) Acknowledgement RESET FAULT MEMORY Stop response STOP V E Siemens AG 2005 All Rights Reserved 7-640 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 641
– Reset both input signals – Acknowledge the fault – Activate the required input signal Acknowledgement RESET FAULT MEMORY Stop response STOP II E Siemens AG 2005 All Rights Reserved 7-641 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 642
(P0241 = 1). Remedy Use the valid positioning mode for this axis type. Acknowledgement RESET FAULT MEMORY Stop response STOP VI E Siemens AG 2005 All Rights Reserved 7-642 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 643
– Remove the power-on inhibit with the edge (0 ––> 1) at control word STW1.0 or terminal 65. – Withdraw the power-on inhibit from the fieldbus signal. Acknowledgement RESET FAULT MEMORY Stop response STOP II E Siemens AG 2005 All Rights Reserved 7-643 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 644
– Position loop gain (P0200) too high (instability/tendency to oscillate) – Mechanical block Remedy Check above parameters and correct. Acknowledgement RESET FAULT MEMORY Stop response STOP II E Siemens AG 2005 All Rights Reserved 7-644 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 645
Check the following parameters and correct: P0236, P0237, P0238, P1005, P1024 Acknowledgement RESET FAULT MEMORY Stop response STOP II (SRM, SLM) STOP I (ARM) E Siemens AG 2005 All Rights Reserved 7-645 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 646
LESS_POS or ENDLESS_NEG command is only permitted with P0110 = 0 or 1. Remedy Block change enable or change P0110. Acknowledgement RESET FAULT MEMORY Stop response STOP VI E Siemens AG 2005 All Rights Reserved 7-646 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 647
The velocity, specified in this block lies outside the range (1 000 to 2 000 000 000 c*MSR/min). Remedy Change the velocity in the block Acknowledgement RESET FAULT MEMORY Stop response STOP VI E Siemens AG 2005 All Rights Reserved 7-647 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 648
Return the external position reference value to the value range. Then acknowledge the fault. Acknowledgement RESET FAULT MEMORY Stop response STOP II E Siemens AG 2005 All Rights Reserved 7-648 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 649
– Set P0163 (reference point approach velocity) to a lower value – Increase P0104 (maximum deceleration) – Use larger reference cam Acknowledgement RESET FAULT MEMORY Stop response STOP V E Siemens AG 2005 All Rights Reserved 7-649 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 650
– Check the source of the external position reference value and input signal source. Acknowledgement RESET FAULT MEMORY Stop response STOP VI E Siemens AG 2005 All Rights Reserved 7-650 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 651
Remedy Only switch-in the coupling if the traversing program has been com- pleted. Acknowledgement RESET FAULT MEMORY Stop response STOP V E Siemens AG 2005 All Rights Reserved 7-651 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 652
Remedy Adjust the drive by setting the absolute value. Acknowledgement RESET FAULT MEMORY Stop response STOP IV E Siemens AG 2005 All Rights Reserved 7-652 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 653
Select the valid and existing traversing block. Activate ”Automatically search for block numer” function. Acknowledgement RESET FAULT MEMORY Stop response STOP IV E Siemens AG 2005 All Rights Reserved 7-653 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 654
For two revolutions a zero mark was no longer detected, which was in a tolerance bandwidth of P0126. Remedy Check cable and connections. Acknowledgement RESET FAULT MEMORY Stop response STOP II E Siemens AG 2005 All Rights Reserved 7-654 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 655
2. Move back with jog key 1 or 2 with velocity. 3. Interrupt traversing blocks with the operating condition, reject tra- versing task. Acknowledgement RESET FAULT MEMORY Stop response STOP VI E Siemens AG 2005 All Rights Reserved 7-655 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 656
Spindle positioning is only possible with motor 1. Remedy Activate motor data set 1 before the spindle positioning command. Acknowledgement RESET FAULT MEMORY Stop response STOP II E Siemens AG 2005 All Rights Reserved 7-656 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 657
– Reduce the P gain of current controller (P1120), check the current controller adaptation (P1180, P1181, P1182) – Replace control module – Replace the power section Acknowledgement POWER ON Stop response parameterizable E Siemens AG 2005 All Rights Reserved 7-657 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 658
– Check the encoder, encoder cables and connectors between the motor and control module – Replace control module – Replace encoder Acknowledgement POWER ON Stop response parameterizable E Siemens AG 2005 All Rights Reserved 7-658 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 659
– Replace the encoder cables or the control module – Replace control module – Exchange the encoder or motor Acknowledgement POWER ON Stop response parameterizable E Siemens AG 2005 All Rights Reserved 7-659 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 660
– Check the shield contact, front panel, control module (upper screw) – Replace the encoder cables or the control module – Replace encoder Acknowledgement POWER ON Stop response parameterizable E Siemens AG 2005 All Rights Reserved 7-660 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 661
– Check the shield contact, front panel, control module (upper screw) – Replace the encoder cables or the control module – Replace encoder Acknowledgement POWER ON Stop response parameterizable E Siemens AG 2005 All Rights Reserved 7-661 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 662
P1009 from the position- ing axis and n-set axis. Acknowledgement POWER ON Stop response STOP II E Siemens AG 2005 All Rights Reserved 7-662 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 663
– Check whether the master sign-of-life is received and incremented in the parameterized clock cycle. Acknowledgement RESET FAULT MEMORY Stop response STOP II E Siemens AG 2005 All Rights Reserved 7-663 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 664
As soon as cyclic data transfer runs again, the fault can be acknowl- edged. Acknowledgement RESET FAULT MEMORY Stop response STOP II E Siemens AG 2005 All Rights Reserved 7-664 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 665
– Check whether the master sign-of-life (STW2, bits 12–15) is received and is incremented in the parameterized clock cycle. Acknowledgement RESET FAULT MEMORY Stop response STOP II E Siemens AG 2005 All Rights Reserved 7-665 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 666
Set P0875 to 0 in the passive axis. Acknowledgement RESET FAULT MEMORY Stop response STOP II E Siemens AG 2005 All Rights Reserved 7-666 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 667
Note: also refer to description of P1017 Acknowledgement RESET FAULT MEMORY Stop response parameterizable E Siemens AG 2005 All Rights Reserved 7-667 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 668
(changing from rapid traverse in the positive direction to rapid traverse in the neg- ative direction). P1605 = 200 ms E Siemens AG 2005 All Rights Reserved 7-668 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 669
– Use monitoring function in the power section has responded (RESET by powering off/powering on) – Replace the power section or control module Acknowledgement RESET FAULT MEMORY Stop response parameterizable E Siemens AG 2005 All Rights Reserved 7-669 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 670
– Connect the motor encoder cable screen – Reduce the speed setpoint input (P1401) – Replace control module Acknowledgement RESET FAULT MEMORY Stop response parameterizable E Siemens AG 2005 All Rights Reserved 7-670 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 671
– The axis must be able to freely move (e.g. the motor rotor may not be locked) – Reduce the high axis friction (increase P1019) Acknowledgement RESET FAULT MEMORY Stop response parameterizable E Siemens AG 2005 All Rights Reserved 7-671 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 672
With the rotor position identification (P1011.12 and P1011.13) acti- vated, if required, check and reduce P1019 (current, rotor position iden- tification) Acknowledgement RESET FAULT MEMORY Stop response parameterizable E Siemens AG 2005 All Rights Reserved 7-672 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 673
(NC contact) may have responded, or the temperature switch is defective Acknowledgement RESET FAULT MEMORY Stop response parameterizable E Siemens AG 2005 All Rights Reserved 7-673 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 674
(NC contact) may have responded, or the temperature switch is defective Acknowledgement RESET FAULT MEMORY Stop response parameterizable E Siemens AG 2005 All Rights Reserved 7-674 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 675
Start-up again and enter the correct motor code number (P1102). Acknowledgement POWER ON Stop response STOP II (SRM, SLM) STOP I (ARM) E Siemens AG 2005 All Rights Reserved 7-675 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 676
–24 The ratio between the rated motor frequency (P1134) and the rated motor speed (P1400) is inadmissible (pole pair number). Acknowledgement POWER ON Stop response STOP II (SRM, SLM) STOP I (ARM) E Siemens AG 2005 All Rights Reserved 7-676 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 677
Further, the interpolation cycle must be an integral multiple of the posi- tion controller cycle. Acknowledgement POWER ON Stop response STOP II (SRM, SLM) STOP I (ARM) E Siemens AG 2005 All Rights Reserved 7-677 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 678
The torque constant is defined by the motor code (P1102). Acknowledgement POWER ON Stop response STOP II (SRM, SLM) STOP I (ARM) E Siemens AG 2005 All Rights Reserved 7-678 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 679
Acknowledgement POWER ON Stop response STOP II (SRM, SLM) STOP I (ARM) E Siemens AG 2005 All Rights Reserved 7-679 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 680
The voltage constant is determined from the motor code (P1102). Acknowledgement POWER ON Stop response STOP II (SRM, SLM) STOP I (ARM) E Siemens AG 2005 All Rights Reserved 7-680 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 681
The rated motor output is determined from the motor code (P1102). Acknowledgement POWER ON Stop response STOP II (SRM, SLM) STOP I (ARM) E Siemens AG 2005 All Rights Reserved 7-681 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 682
When operating with several motors/motor data sets, also set P2100/P3100/P4100 to 4 or 8 kHz. Acknowledgement POWER ON Stop response STOP II (SRM, SLM) STOP I (ARM) E Siemens AG 2005 All Rights Reserved 7-682 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 683
P gain optimized for the upper speed range (P1408). Acknowledgement RESET FAULT MEMORY Stop response STOP II (SRM, SLM) STOP I (ARM) E Siemens AG 2005 All Rights Reserved 7-683 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 684
Coupling via PROFIBUS-DP or the bus interface selected, but the matching option module is not inserted Remedy Check P891 and enter a valid value. Acknowledgement POWER ON Stop response STOP II E Siemens AG 2005 All Rights Reserved 7-684 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 685
We then recommend that the pole pair width is slightly changed. Acknowledgement POWER ON Stop response STOP II (SRM, SLM) STOP I (ARM) E Siemens AG 2005 All Rights Reserved 7-685 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 686
Check the configuration of terminals A and B in P0890, compare with P0891 and eliminate multiple setpoint sources. Acknowledgement POWER ON Stop response STOP II (SRM, SLM) STOP I (ARM) E Siemens AG 2005 All Rights Reserved 7-686 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 687
Speed setpoint filter 2: P1519 <= 2 * P1517 Acknowledgement RESET FAULT MEMORY Stop response STOP II (SRM, SLM) STOP I (ARM) E Siemens AG 2005 All Rights Reserved 7-687 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 688
For the speed controller, enter a lower value for the P gain (P1451). Acknowledgement RESET FAULT MEMORY Stop response STOP II (SRM, SLM) STOP I (ARM) E Siemens AG 2005 All Rights Reserved 7-688 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 689
Remedy Use a new basic module or incremental measuring system with sin/cos 1 Vpp. Acknowledgement POWER ON Stop response STOP I E Siemens AG 2005 All Rights Reserved 7-689 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 690
The currents are determined using the motor code (P1102). Acknowledgement RESET FAULT MEMORY Stop response STOP II (SRM, SLM) STOP I (ARM) E Siemens AG 2005 All Rights Reserved 7-690 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 691
16 * P1001 * 0.00003125 * P1138 * 2PI * P1134 / (P1140 + P1141) < 1 Acknowledgement RESET FAULT MEMORY Stop response STOP II (SRM, SLM) STOP I (ARM) E Siemens AG 2005 All Rights Reserved 7-691 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 692
The field weakening speed is determined from the motor code (P1102). Acknowledgement RESET FAULT MEMORY Stop response STOP II (SRM, SLM) STOP I (ARM) E Siemens AG 2005 All Rights Reserved 7-692 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 693
– When in the online mode, do not select any time-intensive functions Acknowledgement POWER ON Stop response STOP II (SRM, SLM) STOP I (ARM) E Siemens AG 2005 All Rights Reserved 7-693 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 694
Drive B: P0890 = 0 Remedy Set P0890 to permissible value. Acknowledgement POWER ON Stop response STOP II (SRM, SLM) STOP I (ARM) E Siemens AG 2005 All Rights Reserved 7-694 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 695
Check P0890 for drive B and set to a permissible value Acknowledgement POWER ON Stop response STOP II (SRM, SLM) STOP I (ARM) E Siemens AG 2005 All Rights Reserved 7-695 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 696
1 or 2. – In the n-set mode: Enter a setpoint that opposes the approach direction. Acknowledgement not required Stop response STOP VII E Siemens AG 2005 All Rights Reserved 7-696 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 697
Set the missing signal, and re-start the traversing block or enter a sig- nal edge via PROFIBUS. Acknowledgement not required Stop response STOP VII E Siemens AG 2005 All Rights Reserved 7-697 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 698
Remedy Execute referencing or set a reference point using the ”set reference point” input signal. Acknowledgement not required Stop response STOP VII E Siemens AG 2005 All Rights Reserved 7-698 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 699
– Maintain the minimum clearance above and below the power section (refer to the Configuration Manual) Acknowledgement not required Stop response STOP VII E Siemens AG 2005 All Rights Reserved 7-699 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 700
– A BUS address was assigned several times. Remedy Master, check the assignment of bus addresses and bus connection. Acknowledgement not required Stop response STOP VII E Siemens AG 2005 All Rights Reserved 7-700 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 701
If the master (e.g. SIMATIC S7) does not transfer a sign-of-life, the sign-of-life evalution can also be suppressed using P0879 bit 8. Acknowledgement not required Stop response STOP VII E Siemens AG 2005 All Rights Reserved 7-701 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 702
If required, (reason 31 or reason 32) upgrade the option module firm- ware to a version greater than or equal to 04.01. Acknowledgement not required Stop response STOP VII E Siemens AG 2005 All Rights Reserved 7-702 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 703
PROFIBUS Master for the num- ber of axes involved. Acknowledgement not required Stop response STOP VII E Siemens AG 2005 All Rights Reserved 7-703 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 704
If the master (e.g. SIMATIC S7) does not transfer a sign-of-life, the sign-of-life evalution can also be suppressed using P0879 bit 8. Acknowledgement not required Stop response STOP VII E Siemens AG 2005 All Rights Reserved 7-704 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 705
Remedy Change the traversing block mode ”teach in standard block” from rela- tive to absolute. Acknowledgement not required Stop response STOP VII E Siemens AG 2005 All Rights Reserved 7-705 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 706
(P1411). Remedy P1412 must contain a higher value than P1411. Acknowledgement not required Stop response STOP VII E Siemens AG 2005 All Rights Reserved 7-706 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 707
The input value for the threshold voltage (P1631) is greater than the value in P1630. Remedy Change the drive parameters. Note: P1630 and P1631 being prepared Acknowledgement not required Stop response STOP VII E Siemens AG 2005 All Rights Reserved 7-707 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 708
PARAMETERIZING ERROR: P gain, equalization controller does not fit into the format. Remedy – Change P1491 Acknowledgement not required Stop response STOP VII E Siemens AG 2005 All Rights Reserved 7-708 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 709
Remedy – Motor measuring system: P0660 = 79 – Direct measuring system: P0672 = 79 Acknowledgement not required Stop response STOP VII E Siemens AG 2005 All Rights Reserved 7-709 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 710
The process data for encoder 2 were configured although the direct measuring system is not activated (P0879.12). Remedy Correct P0916:17 Acknowledgement not required Stop response STOP VII E Siemens AG 2005 All Rights Reserved 7-710 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 711
The traversing block is not interrupted. Remedy Check the programming of the acceleration override and deceleration override. Acknowledgement not required Stop response STOP VII E Siemens AG 2005 All Rights Reserved 7-711 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 712
Only one drive can use the output terminals on the optional TERMINAL module. Remedy Check and correct P0696 (A) and P0696 (B). Acknowledgement not required Stop response STOP VII E Siemens AG 2005 All Rights Reserved 7-712 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 713
Commissioning functions Overview The commissioning functions and support tools help during start–up, during service, when optimizing the drive, and troubleshooting. The ”SIMODRIVE 611 universal” control board has the following com- missioning and help functions: Function generator (FG) refer to Chapter 7.4.1 Trace function (refer to Chapter 7.4.2) -
Page 714
Speed controlled operation on Controller enable Pulse enable Internal regenerative stop inactive Ramp–function generator enabled x: Start condition must be fulfilled E Siemens AG 2005 All Rights Reserved 7-714 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 715
(P1804 = 1), all of the higher–level control loops are open. The control loops are re–closed when the function generator is either stopped or canceled. E Siemens AG 2005 All Rights Reserved 7-715 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 716
The commissioning function was not started due to a traversing axis (e.g. active traversing block) =–23 The commissioning function was canceled because the synchronous start enable was withdrawn E Siemens AG 2005 All Rights Reserved 7-716 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 717
Note: When a parameter is changed with the function generator active, this causes the system to crash. E Siemens AG 2005 All Rights Reserved 7-717 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 718
Limiting Parameter list Offset: P1807 Amplitude Amplitude: P1806 Ramp–up Period: P1810 Offset time Limit: P1808 Start Period Ramp–up time: P1813 –”– –”– E Siemens AG 2005 All Rights Reserved 7-718 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 719
Start–up function, bandwidth (FFT) 4 000 8 000 Immedi- (only for P1805 = 4, PRBS) ately … defines the bandwidth in the PRBS mode. E Siemens AG 2005 All Rights Reserved 7-719 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 720
For the ”triangular” waveform, a triangular waveform without peak is obtained by appropriately parameterizing the limit. Limiting Waveform, triangular Fig. 7-5 ”Triangular” waveforms with no peak E Siemens AG 2005 All Rights Reserved 7-720 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 721
2nd amplitude Limiting Amplitude Ramp–up time Period Start –”– –”– Fig. 7-7 ”Staircase” waveform with amplitude > 0 and offset = 0 E Siemens AG 2005 All Rights Reserved 7-721 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 722
Additional information on the trace function is provided in the online help for SimoCom U. E Siemens AG 2005 All Rights Reserved 7-722 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 723
7 Fault Handling/Diagnostics Commissioning functions 7.4.3 Test sockets, DAU1, DAU2 Description For ”SIMODRIVE 611 universal”, there are two test sockets to output analog signals, with the following features: Resolution of the DAU 8 bit Voltage range 0 V to +5 V… -
Page 724
Description, refer to that for P1822. drive B drive B 1836 Status, test socket 2 – Imme- (as standard) diately Description, refer to that for P1826. E Siemens AG 2005 All Rights Reserved 7-724 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 725
Shift factor = 0 Offset = 0 V Hexadecimal value Shift factor = 2 Fine normalization= 100 % Fig. 7-10 Voltage range for test sockets E Siemens AG 2005 All Rights Reserved 7-725 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 726
Additional information on the measuring functions is provided in the online help for SimoCom U. E Siemens AG 2005 All Rights Reserved 7-726 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 727
Activates V/Hz operation P1125 Ramp–up time 1 for V/Hz operation P1127 Voltage at f = 0, V/Hz operation P1132 Rated motor voltage E Siemens AG 2005 All Rights Reserved 7-727 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 728
V/Hz operation is then activated using P1014 = 1. E Siemens AG 2005 All Rights Reserved 7-728 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 729
V/Hz mode. Ramp–up times The ramp–up time can be set via P1125. E Siemens AG 2005 All Rights Reserved 7-729 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 730
75.x. 16.x, 15 GWE–000000588277 6SY9911 X422, X432 I4…I11, O4…O11 GWE–000000588285 6SY9912 Power connector, motor connec- 6SY9904 tion Power connector, pulsed resistor 6SY9905 E Siemens AG 2005 All Rights Reserved 7-730 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 731
……….A-888 E Siemens AG 2005 All Rights Reserved A-731 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 732
(reference point coordinates) a reference point ––> inch 5 inch/min approach must be carried out). ––> degrees 500 degrees/min Fig. A-1 Parameter list E Siemens AG 2005 All Rights Reserved A-732 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 733
… in the ”Positioning” mode specifies the programmed command parameter of the traversing block being processed. Note: refer to the index entry ”Traversing blocks” or P0086:64 E Siemens AG 2005 All Rights Reserved A-733 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 734
… in the ”Positioning” mode displays the actual, effective velocity override. Note: The currently effective override can differ from the specified override due to limits (e. g. P0102 (maximum velocity)). E Siemens AG 2005 All Rights Reserved A-734 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 735
… displays the externally entered position reference value. Note: The quantities of P0895 to P0897 are incorporated in P0032. refer under the index entry ”axis couplings” E Siemens AG 2005 All Rights Reserved A-735 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 736
Unsigned16 PrgE … specifies which override has an effect on the maximum deceleration (P0104). Note: refer to the index entry ”Traversing blocks” E Siemens AG 2005 All Rights Reserved A-736 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 737
Rotary drive: 1 – 65 535 [0.01 Nm] Linear drive: 1 – 65 535 [N] Note: refer to the index entry ”Traversing blocks” or ”Command-dependent block information” E Siemens AG 2005 All Rights Reserved A-737 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 738
”external block change” changes and if MDI is not entered via PROFIBUS-DP control words (STW). refer under the index entry ”traversing blocks” E Siemens AG 2005 All Rights Reserved A-738 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 739
3 ––> 1 MSR = 1/1000 degrees Example: P0100 = 1 ––> 345123 MSR = 345.123 mm Note: refer to the index entry ”Dimension system” E Siemens AG 2005 All Rights Reserved A-739 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 740
Integer32 immed..defines which setpoint is used for jogging 1. Note: refer to the input signal ”Jog 1 ON/Jog 1 OFF” E Siemens AG 2005 All Rights Reserved A-740 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 741
P0111 = 10, P0112 = 100 ––> for 10 V at terminal 56.x/14.x, the override is 100 percent Note: refer to the index entry ”Override” E Siemens AG 2005 All Rights Reserved A-741 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 742
… Defines the monitoring window for the ”fixed endstop reached” status. If the axis exits the positioning window an appropriate fault is signaled. Note: refer to the index entry ”Travel to endstop” E Siemens AG 2005 All Rights Reserved A-742 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 743
Integer32 immed..specifies the number of increments traversed for incremental jogging 2. Note: refer under the index entry ”Jogging – incremental” E Siemens AG 2005 All Rights Reserved A-743 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 744
By setting bit 0 to 1, the zero mark offset to the hardware zero mark is entered into P0128. After this, 0 is written back into P0127. Note: refer under the index entry ”Spindle positioning” E Siemens AG 2005 All Rights Reserved A-744 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 745
No. 59 or PROFIBUS-DP MeldW.15). The position reference value is compared with the posi- tion actual value. Note: refer under the index entry ”Spindle positioning” E Siemens AG 2005 All Rights Reserved A-745 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 746
At this position the axis has reached the reference point and accepts the reference points coordinates (P0160) as new actual value. Note: refer to the index entry ”Reference point approach” E Siemens AG 2005 All Rights Reserved A-746 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 747
… specifies the max. distance the axis can travel from starting the reference point approach in order to find the reference cam. Note: refer to the index entry ”Reference point approach” E Siemens AG 2005 All Rights Reserved A-747 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 748
Absolute value encoder IM is adjusted (from SW 3.1) Absolute encoder DM is adjusted (from SW 3.3) Note: refer to the index entry ”Adjusting the absolute value encoder” E Siemens AG 2005 All Rights Reserved A-748 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 749
If the axis control loop has been optimally set, and the equivalent time constant of the speed control loop has been precisely determined, the pre-control factor is 100%. Note: refer to the index entry ”speed feedforward control” E Siemens AG 2005 All Rights Reserved A-749 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 750
… specifies the ratio (Ü) between the encoder and load. Ü = P0237:8 / P0238:8 Note: refer to the index entry ”Encoder adaptation” E Siemens AG 2005 All Rights Reserved A-750 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 751
–200000000 200000000 Integer32 immed..the cam switching position 2 is set. Note: refer to the index entry ”Position-related switching signals (cams)” E Siemens AG 2005 All Rights Reserved A-751 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 752
… defines the time after which the following error must be within the standstill window (P0326). Note: refer to the index entry ”Standstill monitoring” E Siemens AG 2005 All Rights Reserved A-752 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 753
Coupling factor slave drive revolutions (–> 3.3) Standard Unit Data type Effective 8388607 – Unsigned32 … defines the coupling factor between the master and slave drive. E Siemens AG 2005 All Rights Reserved A-753 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 754
For couplings with queue functionality (from SW 3.5) the following is valid: The measured distances to the actual slave drive position are entered into P0425:16. Note: refer under the index entry ”axis couplings” E Siemens AG 2005 All Rights Reserved A-754 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 755
Standard Unit Data type Effective – – – V(pk) Floating Point … displays the analog voltage presently available at this input terminal. E Siemens AG 2005 All Rights Reserved A-755 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 756
Analog setpoint for n-set/M-set/M-red ––> refer to the index entry ”Analog inputs” Analog setpoint for velocity override ––> refer to the index entry ”Override” E Siemens AG 2005 All Rights Reserved A-756 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 757
SRM: P0618 = 9, P1401:8 = 2000 –> at 9 V, the motor speed is 2000 RPM SLM: P0618 = 9, P1401:8 = 120 –> at 9 V, the motor velocity is 120 m/min E Siemens AG 2005 All Rights Reserved A-757 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 758
P0625: P0625 = 100% –> +10 V P0625 = 50% –> +5 V Note: Signal No. 36 is output signed. E Siemens AG 2005 All Rights Reserved A-758 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 759
… smooths the output signal with a 1st order proportional element (PT1 element, low pass fil- ter). filter is inactive Note: refer to the index entry ”Analog outputs” E Siemens AG 2005 All Rights Reserved A-759 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 760
The following is valid: P0641:0 no meaning P0641:1 Fixed setpoint 1, selection via input signals P0641:2 Fixed setpoint 2, selection via input signals, etc. E Siemens AG 2005 All Rights Reserved A-760 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 761
Data backup runs, other parameters cannot be selected Note: The parameter is automatically set to 0 at the end of data backup. E Siemens AG 2005 All Rights Reserved A-761 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 762
Bit 21 Equivalent zero mark Bit 22 Flying measurement/length measurement Note: <––>: Signal in ”speed/torque setpoint” <––> in ”positioning” /: 1 signal/0 signal E Siemens AG 2005 All Rights Reserved A-762 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 763
Bit 13 activate angular incremental encoder handwheel (from SW 8.1) Bit 17 Activate MDI (from SW 7.1) Bit 21 Activate coupling via I0.x Bit 22 Set position reference value E Siemens AG 2005 All Rights Reserved A-763 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 764
Bit 22 Status block selection, 5th output Bit 23 Status, block selection, 6th output Note: <––>: Signal in ”speed/torque setpoint” <––> in ”positioning” E Siemens AG 2005 All Rights Reserved A-764 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 765
In the normal condition, the motor code and power section code are write-protected. When starting-up for the first time using ”Load file”, P0659 remains at 2 (internal siemens). E Siemens AG 2005 All Rights Reserved A-765 SIMODRIVE 611 universal Description of Functions (FBU) –… -
Page 766
The function number from the ”List of input signals” is entered. Note: refer to the index entry ”Terminals term. I4 to I11” or ”List of the input signals” E Siemens AG 2005 All Rights Reserved A-766 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 767
The function number from the ”List of input signals” is entered. Note: refer to the index entry ”Terminals term. I4 to I11” or ”List of the input signals” E Siemens AG 2005 All Rights Reserved A-767 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 768
The function is entered from the ”List of output signals”. Note: refer to the index entry ”Terminals term. O0.x to O3.x” or ”List of the output signals” E Siemens AG 2005 All Rights Reserved A-768 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 769
The function is entered from the ”List of output signals”. Note: refer to the index entry ”Terminals term. O4 to O11” or ”List of the output signals” E Siemens AG 2005 All Rights Reserved A-769 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 770
The terminals can only be assigned to a drive once. Prerequisite for the assignment: P0875 = 1 Assignment, inputs: Refer to P0676 E Siemens AG 2005 All Rights Reserved A-770 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 771
– Programming, selecting and starting traversing blocks – Enter velocity override – Torque reduction (M reduction) Note: Operation is possible via terminals, via PROFIBUS-DP or both together. E Siemens AG 2005 All Rights Reserved A-771 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 772
4. Write 2 into P0659 (pre-assign motor/ LT data, calculate controller data) 5. Write into all parameters listed in parameter P0730 (minus the parameters listed in P0731) E Siemens AG 2005 All Rights Reserved A-772 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 773
Supplementary information, warning 800 (P0953 bit 0) P0828:1 Supplementary information, warning 801 (P0953 bit 1) P0828:127 Supplementary information, warning 927 (P0960 bit 15) E Siemens AG 2005 All Rights Reserved A-773 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 774
The pulses are only canceled after this time. Note: refer to the index entry ”Motor holding brake” E Siemens AG 2005 All Rights Reserved A-774 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 775
Module, 2-axis for resolvers Module, 2-axis for encoders with sin/cos 1 Vpp Module, 1-axis for resolvers Module ”SIMODRIVE 611 universal E”, 2-axis for encoders with sin/cos 1 Vpp Module HR, 2-axis for encoders with sin/cos 1 Vpp Module HR, 2-axis for resolvers Module HR, 1-axis for resolvers Module HR ”SIMODRIVE 611 universal E”, 2-axis for encoders with… -
Page 776
––> with P0875 = 0 in both drives, the ”DP slave 611U” is disabled This allows, for example, ”disturbing” slaves to be temporarily disabled when commissioning other nodes (refer to the index entry ”Commissioning PROFIBUS-DP”). E Siemens AG 2005 All Rights Reserved A-776 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 777
P879 Bit 0 = 1, Bit 1 = 0, Bit 2 = 0, Bit 9 = 1 P1012 Bit 12 = 1, Bit 13 = 1, Bit 14 = 0 E Siemens AG 2005 All Rights Reserved A-777 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 778
4000hex or 16384dec in control word NSET_A corresponds to the speed or velocity in P0880. refer to the index entry ”Control words NSET_A or NSET_B” E Siemens AG 2005 All Rights Reserved A-778 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 779
… together with P0896, defines the format for the output of positions via PROFIBUS-DP. Note: refer to P0896 refer under the index entry ”axis couplings” E Siemens AG 2005 All Rights Reserved A-779 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 780
– Unsigned16 … defines how the angular encoder interface and encoder interface are operated. – Angular encoder interface (X461, X462 for ”SIMODRIVE 611 universal”) – Encoder interface (X472 for ”SIMODRIVE 611 universal E”) Angular encoder interface or encoder interface switched-out… -
Page 781
”Angular encoder interface” E Siemens AG 2005 All Rights Reserved A-781 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 782
… defines whether the position reference value is entered externally and therefore the direction should be inverted. position setpoint inversion Not inverted Note: refer under the index entry ”axis couplings” E Siemens AG 2005 All Rights Reserved A-782 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 783
Unsigned16 immed..defines the factor with which the handwheel pulses are evaluated. Note: refer to the index entry ”Angular encoder interface” E Siemens AG 2005 All Rights Reserved A-783 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 784
Index 1 corresponds to Index 0 (etc.) in the description of the PROFIdrive profile. Operating mode not specified ––> possible in every operating mode refer to the index entry ”Configuring the process data” E Siemens AG 2005 All Rights Reserved A-784 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 785
Index 1 corresponds to Index 0 (etc.) in the description of the PROFIdrive profile. Operating mode not specified ––> possible in every operating mode refer to the index entry ”Configuring the process data” E Siemens AG 2005 All Rights Reserved A-785 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 786
If this parameter is read via non-cyclic communication (PROFIdrive), then the indices have been shifted. Index 1 corresponds to Index 0 (etc.) in the description of the PROFIdrive profile. E Siemens AG 2005 All Rights Reserved A-786 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 787
64) corresponding to the fault number, but instead in the following sub-index (in the example 65). refer to the index entry ”PROFIBUS-DP – evaluate faults”. E Siemens AG 2005 All Rights Reserved A-787 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 788
The parameter specifies the number of faults which occurred after POWER ON. Note: This parameter is reset at POWER ON. refer to the index entry ”PROFIBUS-DP – evaluate faults”. E Siemens AG 2005 All Rights Reserved A-788 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 789
Bit x = 0 The alarm assigned to the bit, is not present refer to the index entry ”PROFIBUS-DP – evaluate warnings”. E Siemens AG 2005 All Rights Reserved A-789 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 790
9.6 kbit/s 19.2 kbit/s 93.75 kbit/s 187.5 kbit/s 500 kbit/s 1500 kbit/s 3000 kbit/s 6000 kbit/s 12000 kbit/s 31.25 kbit/s 45.45 kbit/s E Siemens AG 2005 All Rights Reserved A-790 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 791
Product type: 1101 SIMODRIVE 611 universal 2 axis with 1Vpp encoder, n-set 1102 SIMODRIVE 611 universal 2 axis with 1 Vpp encoder, positioning 1103 SIMODRIVE 611 universal 2 axis with resolver, n-set 1104 SIMODRIVE 611 universal 2 axis with resolver, positioning… -
Page 792
After P0972=1, the link between the drive and SimoComU is interrupted with the following mes- sage: ”Reading from the interface was interrupted due to time overflow”. The link is re-estab- lished when SimoCom U is re-started. E Siemens AG 2005 All Rights Reserved A-792 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 793
If this parameter is read via non-cyclic communication (PROFIdrive), then the indices have been shifted. Index 1 corresponds to Index 0 (etc.) in the description of the PROFIdrive profile. E Siemens AG 2005 All Rights Reserved A-793 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 794
If this parameter is read via non-cyclic communication (PROFIdrive), then the indices have been shifted. Index 1 corresponds to Index 0 (etc.) in the description of the PROFIdrive profile. E Siemens AG 2005 All Rights Reserved A-794 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 795
Data type Effective 31.25µs Unsigned16 Current controller clock cycle = P1000 x 31.25 microseconds Note: refer to the index entry ”Clock cycles” E Siemens AG 2005 All Rights Reserved A-795 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 796
If the encoder pulse number cannot be divided by 10 or 16 without a remainder, the zero mark monitoring is internally disabled. E Siemens AG 2005 All Rights Reserved A-796 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 797
The interpolation clock cycle must be an integer multiple of the position controller clock cycle. refer to the index entry ”Clock cycles” E Siemens AG 2005 All Rights Reserved A-797 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 798
Resolver resolution, 14 bits Bit 2 = 0 Resolver resolution, 12 bits Note: 14 bit resolver resolution can only be set with ”SIMODRIVE 611 universal HR”, otherwise error 759 is output. Bit 12 Coarse position identification Bit 12 = 2… -
Page 799
The power-on inhibit is generated when OFF2/OFF3 and OFF1 are simultaneously withdrawn Note: Bit 14 is only effective for bit 13 = 1 E Siemens AG 2005 All Rights Reserved A-799 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 800
… specifies the angular offset to the position actual value of the EnDat encoder. Note: The angular offset is read out each time the drive runs up. E Siemens AG 2005 All Rights Reserved A-800 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 801
2p = 2 (2 speed) 2p = 3 (3 speed) 2p = 4 (4 speed) Note: IM ––> Indirect measuring system (motor encoder) E Siemens AG 2005 All Rights Reserved A-801 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 802
4294967295 – Unsigned32 Resolution of the absolute value encoder in measuring pulses per revolution. Note: IM ––> Indirect measuring system (motor encoder) E Siemens AG 2005 All Rights Reserved A-802 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 803
IM serial number, high part (SRM SLM) Standard Unit Data type Effective FFFF Unsigned16 (SRM SLM) Note: IM ––> Indirect measuring system (motor encoder) E Siemens AG 2005 All Rights Reserved A-803 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 804
Note: DM ––> Direct measuring system Revolutions which can be resolved for indirect measuring system (IM, motor encoder) ––> refer to P1021 E Siemens AG 2005 All Rights Reserved A-804 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 805
DM ––> Direct measuring system Encoder code for indirect measuring system (IM, motor encoder) ––> refer to P1006 refer to the index entry ”Encoder code” E Siemens AG 2005 All Rights Reserved A-805 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 806
This parameter applies for the following: – Fine resolution for process data G1_XIST1 – Fine resolution for G1_XIST2 for reference mark or flying measurement E Siemens AG 2005 All Rights Reserved A-806 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 807
IM ––> Indirect measuring system (motor encoder) This monitoring is only activated if P1050/P1024*1000 can either be divided by 16 or by 10. E Siemens AG 2005 All Rights Reserved A-807 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 808
500000 Unsigned32 (SLM) 450000 mDegree Unsigned32 (SRM ARM) … specifies the distance between two reference marks for distance-coded encoders, direct measuring system. E Siemens AG 2005 All Rights Reserved A-808 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 809
610 (rotor position identification not successful) is signaled and P1734 is set to –6. E Siemens AG 2005 All Rights Reserved A-809 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 810
The function is only permissible for third-party motors (P1102 = 99) Note: In the case of an error, no equivalent circuit diagram data were changed (exception: code –56). E Siemens AG 2005 All Rights Reserved A-810 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 811
P1083 = 4 and start with P1084 = 1 (if it is not 0, evaluate error code) Calculated and written parameters: P1117 Note: For a detailed description, please refer to the index entry ”Motor data optimization”. E Siemens AG 2005 All Rights Reserved A-811 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 812
Calc. deadtime current control loop Standard Unit Data type Effective µs Integer16 Note: Internal Siemens (Firmware checks the setting at run-up and is automatically changed) E Siemens AG 2005 All Rights Reserved A-812 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 813
6SN112x–1Ax0x–0DAx 6SN112x–1Ax0x–0GAx 8 (only for PE spindle) 6SN112x–1Ax0x–0EAx 6SN112x–1Ax0x–0FAx 6SN112x–1Ax0x–0JAx 11 (only for PE spindle) 6SN112x–1Ax0x–0KAx 6SN112x–1Ax0x–0LAx 13 (only for PE spindle) E Siemens AG 2005 All Rights Reserved A-813 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 814
The code of the identified power section is in P1110 and must coincide with the code entered into P1106 (power section code number). Note: Assignment, power module code number, refer to P1106 E Siemens AG 2005 All Rights Reserved A-814 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 815
Data type Effective 300.0 Floating Point (SRM SLM) … specifies the three-phase inductance of the armature. L(rotating field) = 1.5 x L(phase) E Siemens AG 2005 All Rights Reserved A-815 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 816
0 to the maximum motor speed (P1146). 1127 Voltage at f = 0 V/f operation (ARM) Standard Unit Data type Effective 20.0 V(pk) Floating Point immed. (ARM) E Siemens AG 2005 All Rights Reserved A-816 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 817
Data type Effective 100.0 Floating Point immed. (ARM) 1140 Rotor leakage reactance (ARM) Standard Unit Data type Effective 100.0 Floating Point immed. (ARM) E Siemens AG 2005 All Rights Reserved A-817 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 818
Traverse without reluctance torque: P1128 and P1149 equal to the standard value 1150 P gain flux controller (ARM) Standard Unit Data type Effective 400.0 99999.9 A/Vs Floating Point immed. (ARM) E Siemens AG 2005 All Rights Reserved A-818 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 819
(SLM) The pole pair width of a linear drive corresponds to the length from a north and south pole of the magnet. E Siemens AG 2005 All Rights Reserved A-819 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 820
Filters 1, 2, 3 and 4 active Note: The current setpoint filters are described in: References: /FBA/, Description of Functions, Drive Functions, Section DD2 E Siemens AG 2005 All Rights Reserved A-820 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 821
0.05 – Floating Point immed. Note: The current setpoint filters are described in: References: /FBA/, Description of Functions, Drive Functions, Section DD2 E Siemens AG 2005 All Rights Reserved A-821 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 822
Effective 7999.0 Floating Point immed. Note: The current setpoint filters are described in: References: /FBA/, Description of Functions, Drive Functions, Section DD2 E Siemens AG 2005 All Rights Reserved A-822 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 823
3500.0 7999.0 Floating Point immed. Note: The current setpoint filters are described in: References: /FBA/, Description of Functions, Drive Functions, Section DD2 E Siemens AG 2005 All Rights Reserved A-823 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 824
1233:8 Generative limitation Standard Unit Data type Effective 100.0 100.0 Floating Point immed. The setting refers to the parameter value in P1230. E Siemens AG 2005 All Rights Reserved A-824 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 825
Normalization, force/power reduction. (SLM) Standard Unit Data type Effective 100.0 100.0 Floating Point immed. Note: refer to the index entry ”Torque/power reduction” E Siemens AG 2005 All Rights Reserved A-825 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 826
… the speed threshold for the motor changeover is defined with the speed threshold (P1013 = 3) to change over the motor data sets P3xxx to P4xxx. Note: refer to the index entry ”Motor changeover” E Siemens AG 2005 All Rights Reserved A-826 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 827
This parameter has no effect on the closed-loop control. 1254 Time constant current monitoring Standard Unit Data type Effective Floating Point immed. Note: Internal Siemens E Siemens AG 2005 All Rights Reserved A-827 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 828
Note: Max. permissible actual speed for synchronous motors: Minimum from 1.1 (1.05 from SW 7.1 with ”SIMODRIVE 611 universal HR”, resolver) x P1400 and P1147 Max. permissible actual speed for induction motors: Minimum from P1146 and P1147 Max. permissible actual speed for linear motors: From P1147 refer to the index entry ”Ramp-function generator”. -
Page 829
The maximum useful motor speed, set via P1401:8, is not exceeded, independent of whether the setpoint is entered via terminal or PROFIBUS. refer to the index entry ”speed-controlled operation” E Siemens AG 2005 All Rights Reserved A-829 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 830
999999.0 Ns/m Floating Point immed. (SLM) 999999.0 Nm*s/rad Floating Point immed. (SRM ARM) Note: refer to the index entry ”Speed controller optimization” E Siemens AG 2005 All Rights Reserved A-830 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 831
Data type Effective 8000.0 Floating Point immed. Note: The reference model is described in: References: /FBA/, Description of Functions, Drive Functions, Section DD2 E Siemens AG 2005 All Rights Reserved A-831 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 832
20.0 10000.0 Floating Point immed. (SRM ARM) The tolerance bandwidth for the ”n_set = n_act” output signal is defined using this parameter. E Siemens AG 2005 All Rights Reserved A-832 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 833
Data type Effective 100000.0 100000.0 Floating Point immed. (ARM) Threshold speed for the changeover from the MSD to induction motor (IM) control. E Siemens AG 2005 All Rights Reserved A-833 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 834
… enters a weighting fo the torque setpoint ( or force for the force setpoint (SLM) ) of the slave axis for the equalization controller. E Siemens AG 2005 All Rights Reserved A-834 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 835
The filter can be switched out/switched in via the ”First speed setpoint filter off” input signal. The speed setpoint filters are described in: References: /FBA/, Description of Functions, Drive Functions, Section DD2 E Siemens AG 2005 All Rights Reserved A-835 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 836
3500.0 7999.0 Floating Point immed. Note: The speed setpoint filters are described in: References: /FBA/, Description of Functions, Drive Functions, Section DD2 E Siemens AG 2005 All Rights Reserved A-836 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 837
100.0 141.0 Floating Point immed. Note: The speed setpoint filters are described in: References: /FBA/, Description of Functions, Drive Functions, Section DD2 E Siemens AG 2005 All Rights Reserved A-837 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 838
Bit x = ”1” ––> Fault is suppressed, i.e. de-activated Bit x = ”0” ––> Fault is activated E Siemens AG 2005 All Rights Reserved A-838 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 839
DC link voltage is greater than the selected alarm threshold. Note: The output terminal signals can be inverted via parameter P0699 ”Inversion, output terminal signals”. E Siemens AG 2005 All Rights Reserved A-839 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 840
Refer under the index entry ”Monitoring functions”. 1610 Diagnostic functions Standard Unit Data type Effective Unsigned16 (ARM) Unsigned16 (SRM SLM) Note: Internal Siemens E Siemens AG 2005 All Rights Reserved A-840 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 841
Bit x = ”1” ––> STOP 1 is executed (internal pulse cancellation) Bit x = ”0” ––> STOP II is executed (internal controller inhibit) E Siemens AG 2005 All Rights Reserved A-841 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 842
Integer32 immed. Note: Parameterize ”variable message function” in the selection box with SimoCom U. Refer under the index entry ”Variable message function” E Siemens AG 2005 All Rights Reserved A-842 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 843
Note: refer to the index entry ”Signal selection list for analog output” 1652 Memory location min/max memory Standard Unit Data type Effective FFFFFF Unsigned32 immed. Note: Internal Siemens E Siemens AG 2005 All Rights Reserved A-843 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 844
P1701. 1703 Lead time, motor measuring system conversion Standard Unit Data type Effective µs – – – Unsigned16 Note: Internal Siemens E Siemens AG 2005 All Rights Reserved A-844 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 845
… displays the actual torque setpoint or force setpoint (SLM). Note: The torque/force setpoint display is smoothed using a PT1 filter (P1252). E Siemens AG 2005 All Rights Reserved A-845 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 846
Actual rotor position (electrical) (–> 3.3) Standard Unit Data type Effective – – – Degree Floating Point …displays the actual electrical rotor position. E Siemens AG 2005 All Rights Reserved A-846 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 847
––> ”Parameterization for motion-based traversing” Note: refer to P1736 or under the index entry ”Rotor position identification”, ”PE spindle” or ”Linear motor” E Siemens AG 2005 All Rights Reserved A-847 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 848
… displays that at least one parameter was written into and the value was not yet saved in the non-volatile memory (FEPROM). Must be saved in the FEPROM because parameters have been changed Need not be saved in the FEPROM E Siemens AG 2005 All Rights Reserved A-848 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 849
Source of process data 1 (STW1) P1781:2 Source of process data 2 (PZD2), etc. Note: refer to the index entry ”Process data” E Siemens AG 2005 All Rights Reserved A-849 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 850
:9 PLL window (Tpllw) in 1/12 µs :10 PLL delay time (Tplld) in 1/12 µs :11 External slave-to-slave communication links :12 Internal slave-to-slave communication links E Siemens AG 2005 All Rights Reserved A-850 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 851
1, process data 1 (status word 1), with index 2, process data 2 (PZD2), … Note: refer to the index entry ”Process data” E Siemens AG 2005 All Rights Reserved A-851 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 852
– – – – Unsigned32 … displays the firmware version on the memory module. Example: P1799 = 10103 ––> V01.01.03 is available E Siemens AG 2005 All Rights Reserved A-852 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 853
Start-up function, ramp-up time to P1400 Standard Unit Data type Effective 32.0 100000.0 Floating Point immed. Note: refer to the index entry ”Function generator” E Siemens AG 2005 All Rights Reserved A-853 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 854
Unsigned16 immed. Note: Internal Siemens 1824 Offset address test socket 1 Standard Unit Data type Effective FFFFFF Unsigned32 immed. Note: Internal Siemens E Siemens AG 2005 All Rights Reserved A-854 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 855
Note: Internal Siemens 1836 Status test socket 2 Standard Unit Data type Effective – Unsigned16 immed. Description, refer to that for P1826. E Siemens AG 2005 All Rights Reserved A-855 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 856
= 9 A S 80 % = 7.2 A P1111 = 9 A, P1099 = 80 % ––> reduced rated current I from SW 8.2 onwards (only for PE spindles) E Siemens AG 2005 All Rights Reserved A-856 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 857
= P1111 (rated current, power module) S P1099 (limit factor, power module currents) Fig. A-2 Behavior when operation is continued at the current limit E Siemens AG 2005 All Rights Reserved A-857 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 858
(from SW 4.1) Interrelationship between parameters: P1262 Constant Running P1263 100 % <100 % P1264 <100 % 100 % ––> Limiting? E Siemens AG 2005 All Rights Reserved A-858 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 859
16.0 10.40 1FK6085–7AF7x–xxxx 2216 3000 22.0 22.50 1FK6100–8AF7x–xxxx 2206 3000 18.0 12.20 1FK6101–8AF7x–xxxx 2207 3000 27.0 17.50 1FK6103–8AF7x–xxxx 2208 3000 36.0 23.50 E Siemens AG 2005 All Rights Reserved A-859 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 860
20.00 1FK7105–5AF7x–xxxx 2509 3000 48.0 31.00 1FT6021–6AK7x–xxxx 1411 6000 1.25 1FT6024–6AK7x–xxxx 1412 6000 1.25 1FT6031–xAK7x–xxxx 1401 6000 1.40 1FT6034–xAK7x–xxxx 1402 6000 2.60 E Siemens AG 2005 All Rights Reserved A-860 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 861
13.0 17.30 1FT6084–xAC7x–xxxx 1106 2000 20.0 8.80 1FT6084–xAF7x–xxxx 1208 3000 20.0 13.20 1FT6084–xAH7x–xxxx 1306 4500 20.0 19.80 1FT6084–xAK7x–xxxx 1410 6000 20.0 24.10 E Siemens AG 2005 All Rights Reserved A-861 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 862
70.0 29.00 1FT6108–xAF7x–xxxx 1213 3000 70.0 41.00 1FT6108–xSB7x–xxxx 1140 1500 90.0 31.00 1FT6108–xSC7x–xxxx 1160 2000 90.0 41.00 1FT6108–xSF7x–xxxx 1260 3000 90.0 62.00 E Siemens AG 2005 All Rights Reserved A-862 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 863
1279 1500 300.0 112.00 1FT6138–xWD7x–xxxx 1280 2500 300.0 167.00 Unlisted motors 2000 – – – Note: Space retainer for the Order No. E Siemens AG 2005 All Rights Reserved A-863 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 864
Lower current limit, current controller adaptation 1181 Upper current limit, current controller adaptation 1182 Factor, current controller adaptation 1400 Rated motor speed E Siemens AG 2005 All Rights Reserved A-864 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 865
5000 2000 40.0 29.0 1FE1064–6WN11–xxxx 2840 12000 4300 56.0 56.0 1FE1072–4WH11–xxxx 2882 24000 9700 28.0 64.0 1FE1072–4WL11–xxxx 2883 24000 6800 28.0 45.0 E Siemens AG 2005 All Rights Reserved A-865 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 866
7000 3400 130.0 85.0 1FE1084–6WR11–xxxx 2832 9000 2300 130.0 60.0 1FE1084–6WX11–xxxx 2942 4500 1100 130.0 30.0 1FE1085–4WN11–xxxx 2828 18000 3500 105.0 105.0 E Siemens AG 2005 All Rights Reserved A-866 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 867
16000 3300 150.0 120.0 1FE1103–4WN01–xxxx 2863 16000 4200 80.0 65.0 1FE1103–4WN31–xxxx 2928 16000 3600 102.0 84.0 1FE1103–4WN11–xxxx 2871 16000 3600 102.0 84.0 E Siemens AG 2005 All Rights Reserved A-867 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 868
14000 3000 250.0 162.0 1FE1125–4WP11–xxxx 2898 12500 2500 250.0 147.0 1FE1126–4WN11–xxxx 2899 14000 3000 300.0 200.0 1FE1126–4WP11–xxxx 2900 12500 2500 300.0 180.0 E Siemens AG 2005 All Rights Reserved A-868 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 869
95.0 2SP1255–1xBxx–xxxx 2953 15000 3000 170.0 120.0 Unlisted motors 1999 – – – – Note: x Space retainer for the Order No. E Siemens AG 2005 All Rights Reserved A-869 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 870
Lower current limit, current controller adapta- tion 1181 Upper current limit, current controller adapta- tion 1182 Factor, current controller adaptation 1400 Rated motor speed E Siemens AG 2005 All Rights Reserved A-870 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 871
Motor moment of inertia 1118 Motor standstill current A(rms) 1122 Motor limiting current A(rms) 1128 Optimum load angle Degr. 1136 Motor short–circuit current A(rms) E Siemens AG 2005 All Rights Reserved A-871 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 872
Lower current limit, current controller adapta- tion 1181 Upper current limit, current controller adapta- tion 1182 Factor, current controller adaptation 1400 Rated motor speed E Siemens AG 2005 All Rights Reserved A-872 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 873
3224 15840 2 S 1FN1186–5xF7x–xxxx 3225 21200 2 S 1FN1244–5xF7x–xxxx 3226 21800 2 S 1FN1246–5xF7x–xxxx 3227 29000 2 S 1FN1072–3xF7x–xxxx 3231 3440 E Siemens AG 2005 All Rights Reserved A-873 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 874
10350 1FN3450–4WC0x–xxxx 3429 10350 1FN3450–4WE0x–xxxx 3430 10350 1FN3600–3WB0x–xxxx 3431 10350 1FN3600–3WC0x–xxxx 3432 10350 1FN3600–4WB0x–xxxx 3433 13800 1FN3600–4WB5x–xxxx 3434 13800 1FN3600–4WC0x–xxxx 3435 13800 E Siemens AG 2005 All Rights Reserved A-874 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 875
3627 20700 2 S 1FN3450–4WB5x–xxxx 3628 20700 2 S 1FN3450–4WC0x–xxxx 3629 20700 2 S 1FN3450–4WE0x–xxxx 3630 20700 2 S 1FN3600–2WB0x–xxxx 3631 20700 E Siemens AG 2005 All Rights Reserved A-875 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 876
Note: Space retainer for the Order No. 2 S 1FN … There are two motors, connected in parallel to a power module E Siemens AG 2005 All Rights Reserved A-876 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 877
Danger It is only permissible to connect temperature sensor cables with PELV or SELV voltage (refer to EN 60204–1 Chapter 6.4) E Siemens AG 2005 All Rights Reserved A-877 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 878
1500 27.0 85.0 1PH4138–4NF2x–xxxx 1500 30.0 102.0 1PH4163–4NF2x–xxxx 1500 37.0 107.0 1PH4167–4NF2x–xxxx 1500 46.0 120.0 1PH4168–4NF2x–xxxx 1500 52.0 148.0 1PH6101–4NF4x–xxxx 1500 13.0 E Siemens AG 2005 All Rights Reserved A-878 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 879
11.0 45.0 1PH6138–4NF4x–xxxx 1500 22.0 65.0 1PH6138–4NG4x–xxxx 2000 28.0 71.0 1PH6138–xNF0x–xxxx 1500 22.0 55.0 1PH6161–4NF4x–xxxx 1500 22.0 64.0 1PH6161–4NG4x–xxxx 2000 28.0 72.0 E Siemens AG 2005 All Rights Reserved A-879 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 880
78.0 DMR160.80.6RIF–Y 12.6 60.0 DMR160.80.6RIF–D 12.6 60.0 1PH6226–4NB8x–xxxx–Y 42.0 95.0 1PH6226–4NB8x–xxxx–D 1250 42.0 95.0 1PH7131–xNF4x–xxxx 1500 11.0 23.1 1PH7133–xND4x–xxxx 1000 12.0 28.0 E Siemens AG 2005 All Rights Reserved A-880 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 881
88.8 1PH7184–xxDxx–xxxx 1000 39.0 90.0 1PH7184–xxFxx–xxxx 1500 51.0 120.0 1PH7184–xxLxx–xxxx 2500 78.0 171.0 1PH7186–xxDxx–xxxx 1000 51.0 116.0 1PH7101–xxFxx–xLxx 1500 10.0 1PH7103–xxDxx–xLxx 1000 E Siemens AG 2005 All Rights Reserved A-881 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 882
11.0 38.0 1PM4133–xxF8x–xxxx–Y 1500 11.0 41.0 1PM4133–xxF8x–xxxx–D 4000 11.0 41.0 1PM4133–xxW2x–xxxx 1500 15.0 55.0 1PM4137–xxF8x–xxxx–Y 1500 18.5 56.0 1PM4137–xxF8x–xxxx–D 4000 18.5 56.0 E Siemens AG 2005 All Rights Reserved A-882 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 883
11.7 28.0 2SP1255–8xAxx–1xxx 1800 11.7 28.0 2SP1255–8xAxx–1xxx 11.7 30.0 Unlisted motors – – – Note: x: Space retainer for the Order No. E Siemens AG 2005 All Rights Reserved A-883 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 884
Rotor leakage reactance Ω 1141 Magnetizing reactance 1142 Speed at the start of field weakening 1146 Maximum motor speed 1400 Rated motor speed E Siemens AG 2005 All Rights Reserved A-884 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 885
The motor encoder being used is identified by its encoder code in P1006. If encoder systems are used, which are not marketed by SIEMENS (third–party encoder, encoder code = 99), then additional parameters must be ”manually” set corresponding to the measuring system manufacturer’s data (refer to Table A-12). -
Page 886
EQI 1324 integrated Voltage signals sin/cos 1Vpp (from 1FK6xxx–xxxxx–xGxx – EnDat, 32 pulses/revolution, 4096 revolutions which can be differen- 3.3) tiated between E Siemens AG 2005 All Rights Reserved A-886 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 887
Additional information on encoder systems is provided in: Reference: /PJU/ SIMODRIVE 611, Configuration Manual, Drive Converters Chapter ”Indirect and direct position sensing” E Siemens AG 2005 All Rights Reserved A-887 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 888
Incremental encoders with TTL signal from SW 8.1 mounted on in- duction motors – only with ”SIMODRIVE 611 universal HR” (Order No. 6SN1118–VNH01–0AAV) Resolution, From SW 6.1 for ”SIMODRIVE 611 universal HR”, it is possible to set resolver the resolver resolution. Resolver resolution: 14 bit –… -
Page 889
Table 4-14 must be entered. Refer to the parameter overview Chapter A.1 for the significance of parameters P1005, P1021, P1022 and P1024. Parameterizing a For ”SIMODRIVE 611 universal” when a direct measuring system is direct measuring used, it must be appropriately parameterized. system The direct measuring system is commissioned by entering a code num- ber into P1036. -
Page 890
Additional information on encoder systems is provided in: Reference: /PJU/ SIMODRIVE 611, Configuration Manual, Drive Converters Chapter ”Indirect and direct position sensing” E Siemens AG 2005 All Rights Reserved A-890 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 891
Software, which is linked in to the HW Config engineering tool of DRIVE ES Basic SIMATIC S7 for a special slave. Dynamic servo control Digital Signal Processor Dynamic Servo Control (DSC) E Siemens AG 2005 All Rights Reserved B-891 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 892
Induction motor without encoder (IM operation) Rotating induction motor Indirect measuring system (motor measuring system) Sub–index, sub–parameter number array index: Part of a PKW Interpolator Torque–generating current E Siemens AG 2005 All Rights Reserved B-892 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 893
Parameter identification value: Parameterizing part of a PPO Programmable logic controller Phase Locked Loop: Module for clock cycle synchronous operation PROFIBUS User Organization POWER ON E Siemens AG 2005 All Rights Reserved B-893 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 894
Verein Deutscher Ingenieure [Association of German Engineers] VP module, module to limit the DC link voltage when a fault condition occurs (VPM: Voltage Protection Module) E Siemens AG 2005 All Rights Reserved B-894 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 895
B List of Abbreviations Peak–to–peak voltage Machine tools xact Position actual value xset Position setpoint value Status word: Part of a PZD E Siemens AG 2005 All Rights Reserved B-895 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 896
B List of Abbreviations 02.02 Space for your notes E Siemens AG 2005 All Rights Reserved B-896 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 897
Order No.: E86 060–K4670–A111–A8–7600 (English) MOTION–CONNECT Connections & System Components for SIMATIC, SINUMERIK, MASTERDRIVES and SIMOTION Catalog NC Z Order No.: E86060–K4490–A101–B1 Order No.: E86060–K4490–A101–B1–7600 (English) E Siemens AG 2005 All Rights Reserved C-897 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 898
SIEMENS; Publics MCD Verlag; Josef Weigmann, Gerhard Kilian Order No.: A19100–L531–B714 ISBN 3–89578–074–X /P4/ Manual for PROFIBUS Networks SIEMENS; Order No.: 6GK1 970–5CA10–0AA0 E Siemens AG 2005 All Rights Reserved C-898 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 899
Configuration Manual 1PH4 Induction Motors Order No.: 6SN1 197–0AC64–0BP0 /APH7S/ SIMODRIVE 611 (03.04 Edition) Configuration Manual 1PH7 Induction Motors Order No.: 6SN1 197–0AC65–0BP0 E Siemens AG 2005 All Rights Reserved C-899 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 900
Configuration Manual Synchronous Servomotors 1FT6 Order No.: 6SN1 197–0AD02–0BP0 /PFK6/ SIMODRIVE 611, MASTERDRIVES MC (05.03 Edition) Configuration Manual Synchronous Servomotors 1FK6 Order No.: 6SN1 197–0AD05–0BP0 E Siemens AG 2005 All Rights Reserved C-900 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 901
Order No.: 6SN1 197–0AA00–0BP7 /PMS/ SIMODRIVE (03.04 Edition) Configuration Manual ECO Motor Spindles for Main Spindle Drives 2SP1 Order No.: 6SN1 197–0AD04–0BP1 E Siemens AG 2005 All Rights Reserved C-901 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 902
/ET200X/ SIMATIC (05.01 Edition) Distributed ET 200X Manual EWA 4NEB 780 6016–01 04 Part of the package with Order No. 6ES7 198–8FA01–8AA0 E Siemens AG 2005 All Rights Reserved C-902 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 903
Organization e.V. and the certification of the ”Safe Standstill” function The complete certification for the ”Safe standstill” function can be found as follows: Reference: /PJU/ SIMODRIVE 611 Configuration Manual, Drive Converters E Siemens AG 2005 All Rights Reserved D-903 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 904
D Certificates 02.02 Fig. D-1 Certificate, PROFIBUS E Siemens AG 2005 All Rights Reserved D-904 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 905
02.02 D Certificates Fig. D-2 Certificate, ”Safe standstill” function (German, Zertifikat Funktion ”Sicherer Halt”) E Siemens AG 2005 All Rights Reserved D-905 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 906
D Certificates 02.02 Fig. D-3 Certificate, ”Safe standstill” function (English) E Siemens AG 2005 All Rights Reserved D-906 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 907
Attached is an excerpt from the EC Declaration of Conformity for SIMODRIVE 611 universal. The complete EC Declaration of Conformity can be found as follows: Reference: /EMC/ EMC Configuring Guidelines E Siemens AG 2005 All Rights Reserved D-907 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 908
D Certificates 02.02 08.02 Fig. D-4 EC Declaration of Conformity E Siemens AG 2005 All Rights Reserved D-908 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 909
02.02 08.02 D Certificates Fig. D-5 Annex A17 to the Declaration of Conformity (excerpt) E Siemens AG 2005 All Rights Reserved D-909 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 910
D Certificates 02.02 08.02 Fig. D-6 Annex A18 to the Declaration of Conformity (excerpt) E Siemens AG 2005 All Rights Reserved D-910 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 911
02.02 08.02 D Certificates Fig. D-7 Annex A21 to the Declaration of Conformity (excerpt) E Siemens AG 2005 All Rights Reserved D-911 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 912
D Certificates 02.02 08.02 Fig. D-8 Annex A22 to the Declaration of Conformity (excerpt) E Siemens AG 2005 All Rights Reserved D-912 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 913
02.02 08.02 D Certificates Fig. D-9 Annex A23 to the Declaration of Conformity (excerpt) E Siemens AG 2005 All Rights Reserved D-913 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 914
08.02 Annex C to the EC Declaration of Conformity No. E002 Fig. D-10 Annex C to the EC Declaration of Conformity (excerpt) E Siemens AG 2005 All Rights Reserved D-914 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 915
RS485, 2-86 Analog signals Calculate controller data, 4-132 for the current and speed control loop, 6-552 for the position control loop, 6-553 E Siemens AG 2005 All Rights Reserved E-915 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 916
PROFIBUS-DP module, 6-530 2-80 Coding the mini connectors, 2-67 for the optional TERMINAL module, 2-78 Command–dependent block information, 6-410 E Siemens AG 2005 All Rights Reserved E-916 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 917
2-76, 6-474 Encoder limit frequency, 1-48, 2-75 for the optional TERMINAL module, 2-79, Encoders, 1-26, A-885 6-526 Ends of conductors, 2-69 E Siemens AG 2005 All Rights Reserved E-917 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 918
0 (from SW 8.1), 6-495 Angular incremental encoder handwheel evaluation, bit 1 (from SW 8.1), 6-495 Block selection, 6-484 Control requested/no control re- E Siemens AG 2005 All Rights Reserved E-918 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 919
Reset the fault memory, 6-478 Leadscrew pitch, 6-354 Selection, parking axis, 6-483 Set reference point, 6-491 Setpoint setting, master drive (from SW 4.1), 6-492 E Siemens AG 2005 All Rights Reserved E-919 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 920
Positioning monitoring, 6-385 Speed/torque setpoint, 6-331 Standstill monitoring (zero–speed moni- Operator unit, 1-38 toring), 6-383 Motor, 1-25, A-859 Motor changeover (from SW 2.4), 6-580 E Siemens AG 2005 All Rights Reserved E-920 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 921
Minus software limit switch actuated, Velocity limiting active, 6-524 6-522 Warning present/no warning present, Motor being changed over (from SW 6-510 3.3), 6-518 E Siemens AG 2005 All Rights Reserved E-921 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 922
PKW area, 5-206, 5-273 Parameterizing a direct measuring system, Position loop gain, 6-378 A-889 Position setpoint, 6-381 Parameterizing indirect measuring systems, A-889 E Siemens AG 2005 All Rights Reserved E-922 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 923
G1_XIST2 (from SW 3.1), 5-219, 5-243 G1_ZSW (from SW 3.1), 5-219, 5-243 G2_XIST1 (from SW 3.3), 5-219, 5-243 G2_XIST2 (from SW 3.3), 5-219, 5-243 E Siemens AG 2005 All Rights Reserved E-923 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 924
XistP (from SW 3.1), 5-219, 5-242 Resolver resolution, A-888 XsollP (from SW 4.1), 5-220, 5-242 Revisions, vii ZSW1, 5-219, 5-234 ZSW2, 5-219, 5-235 E Siemens AG 2005 All Rights Reserved E-924 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 925
What is different with respect to as input (from SW 3.3), 1-39, 6-565 SIMODRIVE 611 universal?, 1-55 for RS485, 1-39, 3-107 E Siemens AG 2005 All Rights Reserved E-925 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 926
Variable signaling function, 6-507 X452, 2-76 Versions X461, 2-77 of the control board, 1-32 X462, 2-77 of the option modules, 1-32 X471, 2-74, 2-83 E Siemens AG 2005 All Rights Reserved E-926 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition… -
Page 927
Corrections A&D MC BMS For Publication/Manual: Postfach 3180 SIMODRIVE 611 universal SIMODRIVE 611 universal E D–91050 Erlangen Control Components for Closed–Loop Tel./Fax: +49 (0)180 / 5050 – 222 [Hotline] Speed Control and Positioning Fax: +49 (0)9131 / 98 – 2176 Manufacturer/Service Documentation email: motioncontrol.docu@erlf.siemens.de… -
Page 929
Overview of Documentation for SIMODRIVE 611 universal General Documentation SINUMERIK SINUMERIK SIROTEC Catalog SIMODRIVE SIMODRIVE Options Catalog NC 60 S 2002 SL 01 System Solutions KT 10.1 Power Supplies Automation Systems for Processing SITOP power IKPI Industrial Communications Machines ST 70… -
Page 930
Siemens AG Automation and Drives Motion Control Systems © Siemens AG 2005 Postfach 3180, D – 91050 Erlangen Subject to change without prior notice Bundesrepublik Deutschland Order No.: 6SN1197-0AB20-1BP2 Printed in the Federal Republic of Germany www.siemens.com/motioncontrol…
 must be in the Standard setting same setting. Fig. 1-6 Location and settings of switch S1 E Siemens AG 2005 All Rights Reserved 1-39 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…
must be in the Standard setting same setting. Fig. 1-6 Location and settings of switch S1 E Siemens AG 2005 All Rights Reserved 1-39 SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition…