6.1. Понятие точности. Постоянные ошибки
Обратимся
к стандартной структуре системы
автоматического управления, представленной
на рис. 3.1. Основным назначением системы
является как можно более точное
воспроизведение управляющего сигнала.
Естественно, что точность системы можно
оценивать величиной разности управляющего
сигнала
![]() и выхода
и выхода![]() ,
,
т.е. величиной ошибки![]() .
.
Очевидно, чем меньше величина![]() пo
пo
модулю в каждый данный момент времени,
тем система с большей точностью (меньшей
ошибкой) воспроизводит управляющий
сигнал. На практике интересуются не
полной ошибкой системы
![]() ,
,
а так называемойустановившейся
ошибкой
![]() ,
,
которую определяют для достаточно
больших моментов времени после затухания
переходной составляющей.
Изображение
ошибки в соответствии с рис. 3.1 можно
записать в виде
![]() , (6.1)
, (6.1)
где
![]() ,
,![]() ,
,![]() .
.
Из
(6.1) следует, что ошибка системы будет
определяться суммой двух составляющих:
ошибкой системы от управляющего и
ошибкой системы от возмущающего
воздействий. В силу линейности системы
методика вычисления каждой из этих
составляющих будет однотипной, поэтому
рассмотрим лишь методы вычисления
ошибки системы от управляющего сигнала.
При
определенных типах воздействий и
определенной структуре системы
установившаяся ошибка в системе будет
постоянной и
может быть
вычислена на основании правил операционного
исчисления по выражению
 .
.
(6.2)
Рассмотрим
входные воздействия:
![]() ,
,![]() ,
,![]() ,
,![]() ,
,
изображения которых будут соответственно
равны:![]() ,
,![]() ,
,![]() ,
,![]() .
.
Пусть
передаточная функция разомкнутой
системы
![]() .
.
Если
![]() (статическая система),
(статическая система),![]() то, подставляя в (6.2)
то, подставляя в (6.2)![]() и
и![]() ,
,
получим
![]() .
.
(6.3)
Ошибку
![]() будем называтьстатической
будем называтьстатической
ошибкой
системы.
При
![]() (система с астатизмом первого порядка)
(система с астатизмом первого порядка)
вычислим ошибку при воздействиях![]() и
и![]() .
.
Подставляя передаточную функцию![]() и изображение входного сигнала в (6.2),
и изображение входного сигнала в (6.2),
получим соответственно для первого и
второго типов входного сигнала
![]() ,
,
![]() ,
,
(6.4)
где
ошибку
![]() будем называтьошибкой
будем называтьошибкой
по скорости
(скоростной
ошибкой).
При
![]() и входных сигналах
и входных сигналах![]() ,
,![]() ,
,![]() соответственно получим выражения
соответственно получим выражения
ошибок:
![]() ,
,
![]() ,
,![]() ,
,
(6.5)
где
![]() –ошибка
–ошибка
системы по ускорению.
При
воздействии вида
![]() для системы с астатизмом
для системы с астатизмом
![]() -го
-го
порядка получаем
![]() .
.
(6.6)
Из
приведенных выражений следует, что
ошибки в системе уменьшаются с ростом
порядка астатизма системы и увеличением
общего коэффициента усиления K.
На
рис. 6.1 показаны переходные процессы в
различных системах при отработке скачка
по положению и скорости: кривая 1 – для
статической системы, 2 – для системы с
астатизмом первого порядка, 3 – для
системы с астатизмом второго порядка.
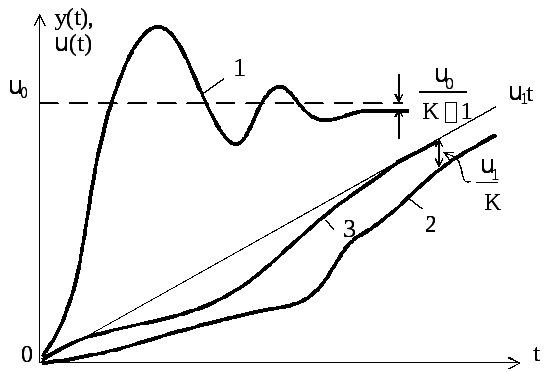
Рис. 6.1
Пример
6.1.
Пусть в системе, изображенной на рис. 3.1
(см. с. 28),
![]() ,
,
![]() ,
,![]() ,
,![]() .
.
Найдем изображение сигнала ошибки,
равное
 .
.
Подставляя
в это выражение
![]()
и
![]() и используя (6.2), получим
и используя (6.2), получим![]() .
.
Таким
образом, установившаяся ошибка от
управляющего воздействия равна нулю
(система астатическая по отношению к
управляющему сигналу), а ошибка от
возмущающего воздействия постоянна
(система статическая по отношению к
возмущению). Для уменьшения этой ошибки
следует увеличивать коэффициент усиления
K1
первого звена; величина K2
не влияет на ошибку.
Рассмотрим
ту же систему при условии, что
![]() ,
, ,
,
т.е. интегрирующее
звено находится до точки приложения
возмущения. В этом случае
 .
.
Если
![]() ,
,![]() ,
,
то используя (6.2), получим![]() ,
,
т.е. статическая ошибка как от управляющего,
так и от возмущающего воздействий равна
нулю и система обладает астатизмом
первого порядка по отношению к обоим
внешним воздействиям. Если![]() ,
,![]() ,
,
то нетрудно получить![]() ,
,
т.е. в системе имеется скоростная ошибка.
Из
рассмотренных примеров следует общий
вывод: система будет обладать астатизмом
![]() -го
-го
порядка по отношению к управляющему и
возмущающему сигналам, если
![]() ,
,
а![]() .
.
Если передаточные функции поменять
местами, то система по отношению к
возмущению будет статической.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
|
|

Макеты страниц
§ 19.1. Статические и скоростные ошибки автоколебательных систем
В предыдущих главах исследовались симметричные автоколебания как результат свободного движения системы (т. е. без внешнего воздействия) при симметричных нелинейностях. Однако, как будет показано, важное практическое значение имеет также рассмотрение несимметричных автоколебаний.
Несимметрия автоколебаний может вызываться различными причинами;
1) несимметричностью нелинейной характеристики как при наличии, так и при отсутствии внешних воздействий;
2) наличием постоянного или медленно меняющегося внешнего воздействия при симметричных нелинейностях;
3) наличием постоянной или медленно меняющейся скорости изменения внешнего воздействия при симметричных нелинейностях (для тех случаев, когда постоянное воздействие не вызывает смещения центра колебаний; обычно это имеет место в следящих системах и вообще в астатических системах).
В самом деле, если имеется несимметричная нелинейная характеристика (например, рис. 19.1, а, б), то даже при симметричных колебаниях переменной  возникают несимметричные по амплитуде колебания переменной
возникают несимметричные по амплитуде колебания переменной  (рис. 19.1, б).
(рис. 19.1, б).

Рис. 19.1.
Если же нелинейность симметрична (например, рис. 19.2, а, б), то при наличии постоянного внешнего воздействия (или в астатических системах при наличии постоянной скорости изменения внешнего
воздействия) смещается центр колебаний переменной  вследствие чего колебания переменной
вследствие чего колебания переменной  становятся несимметричными по амплитуде и по времени (рис. 19.2, а) или только по времени (рис. 19.2, б).
становятся несимметричными по амплитуде и по времени (рис. 19.2, а) или только по времени (рис. 19.2, б).

Рис. 19.2.
Пусть задана автоматическая система, динамика которой описывается уравнением

В данном параграфе будем считать  для статических систем или же
для статических систем или же  для астатических систем. Астатической системой называется такая, в которой многочлен
для астатических систем. Астатической системой называется такая, в которой многочлен  имеет общий множитель
имеет общий множитель  , т. е.
, т. е.  .
.
Поэтому запишем уравнение (19.1) в виде

где соответственно

При этом решение нелинейного уравнения (19.1), в отличие от прежнего (§ 18.2), ищется в форме

причем  а,
а,  являются неизвестными постоянными.
являются неизвестными постоянными.
С учетом величины смещения  первые члены разложения в ряд Фурье вместо (18.6) и (18.7) следует записать в виде
первые члены разложения в ряд Фурье вместо (18.6) и (18.7) следует записать в виде

где при обозначении 

Отсюда видно, что в общем случае все три коэффициента являются функциями трех неизвестных:

В частных случаях эти зависимости могут быть более простыми.
Подстановка выражений (19.4) и (19.5) в заданное дифференциальное уравнение (19.1) с учетом свойства фильтра (см. § 18.2) дает

Это уравнение разбивается на два:

При таком разделении сохраняются существенно нелинейные свойства и отсутствие суперпозиции решений, так как остается нелинейная взаимосвязь обоих уравнений через соотношения (19.7).
Можно предложить два метода решения задачи.
Первый метод состоит в следующем. Уравнение (19.9) совпадает с прежним уравнением (18.33); отличие состоит лишь в том, что теперь коэффициенты q и  согласно (19.7) зависят не только от а и
согласно (19.7) зависят не только от а и  , но и от смещения
, но и от смещения  Поэтому, написав как прежде, характеристическое уравнение
Поэтому, написав как прежде, характеристическое уравнение

заменив  на
на  ивыделив вещественную и мнимую части, в отличие от (18.36), получим здесь два алгебраических уравнения с тремя неизвестными:
ивыделив вещественную и мнимую части, в отличие от (18.36), получим здесь два алгебраических уравнения с тремя неизвестными:

Эти уравнения дают возможность определить амплитуду  и частоту
и частоту  автоколебаний как функции постоянной составляющей
автоколебаний как функции постоянной составляющей 

Для решения этой задачи можно применять любой из способов, описанных в § 18.2, в зависимости от того, какой из них лучше подходит к условиям заданной конкретной задачи. Таким же способом можно определить зависимость а и  не только от
не только от  но и от параметров системы с целью выбора последних. Что касается тех способов § 18.2, где используются графики
но и от параметров системы с целью выбора последних. Что касается тех способов § 18.2, где используются графики  и
и  , то здесь их необходимо строить в виде серии кривых при разных постоянных значениях
, то здесь их необходимо строить в виде серии кривых при разных постоянных значениях  (рис. 19.3).
(рис. 19.3).
После того как из уравнений (19.11) определены зависимости (19.12), можно, воспользовавшись первым из выражений (19.7), найти функцию смещения

Подставив ее в (19.8), получим алгебраическое уравнение

с одной неизвестной  которая отсюда и определяется. Чаще всего это уравнение относительно
которая отсюда и определяется. Чаще всего это уравнение относительно  является трансцендентным и решается графически. Затем согласно (19.12) определяются также амплитуда
является трансцендентным и решается графически. Затем согласно (19.12) определяются также амплитуда  и частота
и частота 
Указанную зависимость (19.12) амплитуды и частоты автоколебаний от величины смещения центра колебаний, характерную именно для нелинейных систем (в линейных системах смещение центра колебаний не играет роли), надо всегда иметь в виду.

Рис. 19.3.
При одних нелинейностях она может быть весьма существенной, при других — менее существенной.
Второй метод решения той же задачи состоит, наоборот, в том, что сначала решается уравнение (19.8), где согласно (19.7) будет  или часто
или часто  . Решение получает вид
. Решение получает вид

Это решение подставляется затем в уравнения (19.11), которые, таким образом, буду! содержать только две неизвестные:  Определив последние (по любому из способов § 18.2), вычисляем потом по (19.15) и величину
Определив последние (по любому из способов § 18.2), вычисляем потом по (19.15) и величину  которая будет в результате зависеть от формы нелинейности, от параметров системы и от внешнего воздействия
которая будет в результате зависеть от формы нелинейности, от параметров системы и от внешнего воздействия 
Величина  и является искомой статической или скоростной ошибкои соответственно для статической и астатической систем.
и является искомой статической или скоростной ошибкои соответственно для статической и астатической систем.
В тех случаях, когда передаточная функция линейной части системы  имеет нулевой корень в знаменателе (что часто бывает), т. е. когда
имеет нулевой корень в знаменателе (что часто бывает), т. е. когда  вместо (19.14) получаем уравнение
вместо (19.14) получаем уравнение

откуда определяется статическое отклонение или скоростная ошибка 
В случае, когда при отсутствии внешнего воздействия  определяются автоколебания в системе с несимметричной нелинейностью, т. е. нелинейностью
определяются автоколебания в системе с несимметричной нелинейностью, т. е. нелинейностью  или же
или же  для которой
для которой

вместо уравнения (19.8) получаем

Оно решается любым из тех же двух методов, описанных выше для уравнения (19.8). Одновременно согласно (19.11) определяются 
Если в этом случае знаменатель  передаточной функции линейной части системы имеет нулевой корень, то
передаточной функции линейной части системы имеет нулевой корень, то  и, следовательно, уравнение (19.18) с учетом (19.13) принимает вид
и, следовательно, уравнение (19.18) с учетом (19.13) принимает вид

откуда определяется  Это означает, что в указанных системах возникает такое смещение
Это означает, что в указанных системах возникает такое смещение  колебаний переменной х, которое ликвидирует свойственную данной нелинейности несимметрию колебаний переменной F (т. е. обеспечивается
колебаний переменной х, которое ликвидирует свойственную данной нелинейности несимметрию колебаний переменной F (т. е. обеспечивается  ), как показано, например, на рис. 19.4 в отличие от рис. 19.1, б.
), как показано, например, на рис. 19.4 в отличие от рис. 19.1, б.
Приведем пример исследования совместного влияния двух внешних воздействий, причем из дальнейшего будет видно, что, в отличие от линейных систем, здесь нельзя просто складывать статические ошибки от отдельно взятых в  ействий.
ействий.
Уравнения автоматической системы (рис. 19.5) заданы в виде

где  — простейшая симметричная релейная характеристика, показанная на рис. 19.5:
— простейшая симметричная релейная характеристика, показанная на рис. 19.5:

Чтобы воспользоваться выведенными выше общими формулами, надо сначала привести заданную систему уравнений (19.20) — (19.22) к одному уравнению типа (19.1).

Рис. 19.4.

Рис. 19.5.
В результате получаем

Пусть  является задающим воздействием, изменяющимся с постоянной скоростью:
является задающим воздействием, изменяющимся с постоянной скоростью:

которое требуется воспроизвести на выходе системы в виде  Допустим также, что второе внешнее воздействие
Допустим также, что второе внешнее воздействие  является возмущающим и имеет постоянную величину (например, постоянная нагрузка на выходном валу системы):
является возмущающим и имеет постоянную величину (например, постоянная нагрузка на выходном валу системы):

Его влияние требуется свести к минимуму. Найдем установившуюся ошибку на выходе системы. Правая часть уравнения (19.24) будет при этом постоянной, и установившееся решение для х с учетом автоколебаний следует искать
в виде

Гармоническая линеаризация нелинейности (19.23) при этом согласно (19.6) дает

В данной задаче согласно (19.24) уравнение (19.9) для периодических составляющих получит вид

а уравнение (19.8) для постоянных составляющих будет

где согласно (19 24)-(19.26)

Выше были указаны два метода решения задачи. Для иллюстрации обоих методов решим данную задачу каждым из них.
Согласно первому методу сначала решается уравнение (19.29) для определения зависимостей 
Характеристическое уравнение здесь будет

и уравнения (19.11) поэтому примут вид

Исключая отсюда  находим частоту автоколебаний
находим частоту автоколебаний

Частота  в данной задаче оказалась не зависящей от смещения
в данной задаче оказалась не зависящей от смещения  , а следовательно, и от величины внешнего воздействия. Затем, подставляя в первое из уравнений (19.33) выражение q из (19.28) и
, а следовательно, и от величины внешнего воздействия. Затем, подставляя в первое из уравнений (19.33) выражение q из (19.28) и  из (19.34), получаем биквадратное уравнение для отыскания зависимости амплитуды автоколебаний
из (19.34), получаем биквадратное уравнение для отыскания зависимости амплитуды автоколебаний  от смещения
от смещения 

где величина

представляет собой амплитуду автоколебаний в данной системе при отсутствии смещения (при  ). Отсюда
). Отсюда

Полученное выражение мояшо записать также в виде

если обозначить

Результат (19.37) или (19.38) и представляет собой искомую зависимость 
Далее, согласно первому методу решения задачи подставим полученное значение амплитуды  из (19.38) в выражение (19.28) для
из (19.38) в выражение (19.28) для  откуда с использованием (19.39) найдем функцию смещения
откуда с использованием (19.39) найдем функцию смещения

где А определяется через параметры системы формулой (19.36).
Подставив величину (19.40) в уравнение (19.30) для постоянных составляющих, с учетом (19.31) и (19.36) получим

Сравнивая это с формулой (19.39), видим, что для искусственно введенной ранее величины а можно записать следующее выражение:

Эта величина характеризует совокупность приложенных к системе внешних воздействий. Учитывая это, из формулы (19.38) находим амплитуду автоколебаний

Существенно то, что амплитуда автоколебаний зависит не только от параметров системы (см. (19.36)), но еще и от величины внешних воздействий. Эта зависимость нелинейная. В данном случае при увеличении внешних воздействий амплитуда уменьшается по закону косинуса, в то время как частота не зависит от внешних воздействий.
Из формулы (19.43) видно, что автоколебания существуют до тех пор, пока величины внешних воздействий удовлетворяют условию

При этом амплитуда автоколебаний изменяется в пределах 
Таков первый метод определения установившихся величин смещения  амплитуды
амплитуды  и частоты
и частоты  автоколебаний при наличии внешних воздействий.
автоколебаний при наличии внешних воздействий.
Проиллюстрируем также и второй метод. Согласно второму методу сначала решается уравнение (19.30). По (19.30) и первой из формул (19.28) находим

или, с учетом (19.31),

Для отыскания входящей сюда амплитуды а воспользуемся уравнением (19.29). Характеристическое уравнение для него будет (19.32), и уравнения (19.11) поэтому примут вид:

где согласно (19.28) и (19.45)

Исключая из уравнений (19.46) величину  находим частоту автоколебаний
находим частоту автоколебаний

Подставив найденные выражения q в первое из уравнений (19.46), найдем амплитуду автоколебаний

где величина

является амплитудой автоколебаний при отсутствии внешних воздействий (при 
Подставив найденное выражение амплитуды (19.49) в формулу (19.45) получим окончательно величину смещения

Как видно, второй метод в данной задаче приводит к тем же самым результатам значительно более коротким путем, чем первый, что очень важно для практических расчетов (принципиально же оба метода эквивалентны друг другу). По-видимому, большая простота второго метода будет иметь место и в большинстве других задач.
В этом втором методе, в отличие от первого, функция смещения  не определяется. Однако последняя может понадобиться в дальнейшем для других целей. Но ее тоже легко можно определить при использовании второго метода. Здесь величины
не определяется. Однако последняя может понадобиться в дальнейшем для других целей. Но ее тоже легко можно определить при использовании второго метода. Здесь величины  и их отношение выражены через величины внешних воздействий. Функция же смещения
и их отношение выражены через величины внешних воздействий. Функция же смещения  не должна содержать ни величин внешних воздействий, ни амплитуды
не должна содержать ни величин внешних воздействий, ни амплитуды  зависящей от них. Подставив значение квадратной скобки из (19.51) в (19.45), получим
зависящей от них. Подставив значение квадратной скобки из (19.51) в (19.45), получим

а подставив это в первую из формул (19.28), сразу получим искомую функцию смещения

где А выражается только через параметры системы согласно (19.50).
Важно отметить, что функция смещения  не зависит ни от числа внешних воздействий, ни от характера их изменения (если они постоянные или медленно меняющиеся), что наиболее наглядно было видно из первого метода решения задачи.
не зависит ни от числа внешних воздействий, ни от характера их изменения (если они постоянные или медленно меняющиеся), что наиболее наглядно было видно из первого метода решения задачи.
Итак, двумя разными методами определена величина смещения  автоколебаний на входе реле. Найдем теперь установившуюся ошибку на выходе системы
автоколебаний на входе реле. Найдем теперь установившуюся ошибку на выходе системы  Поскольку на выходе должно воспроизводиться внешнее воздействие
Поскольку на выходе должно воспроизводиться внешнее воздействие  то согласно рис. 19.5 и второму уравнению (19.20) ошибка данной системы выражается величиной
то согласно рис. 19.5 и второму уравнению (19.20) ошибка данной системы выражается величиной  установившееся решение для которой, следовательно, и надо искать. Выразив переменную
установившееся решение для которой, следовательно, и надо искать. Выразив переменную  через х, которая уже известна, из заданных уравнений системы (19.20) и (19.21) получаем
через х, которая уже известна, из заданных уравнений системы (19.20) и (19.21) получаем

Учитывая (19.25) и (19.27), перепишем данное уравнение в виде

В соответствии с видом правой части установившееся решение этого линейного уравнения следует искать в виде

где  — постоянные, а
— постоянные, а  — периодическая составляющая.
— периодическая составляющая.
Подставив это в (19.54), получим три уравнения для отыскания указанных величин:

Второе из них дает

Тогда из (19.56) находим

где  определяется формулой (19.51) через внешние воздействия. Наконец, из уравнения (19.58) получаем амплитуду автоколебаний переменной
определяется формулой (19.51) через внешние воздействия. Наконец, из уравнения (19.58) получаем амплитуду автоколебаний переменной 

где  определяется формулой (19.49) через внешнее воздействие, а
определяется формулой (19.49) через внешнее воздействие, а  — формулой (19.48).
— формулой (19.48).
Итак, в данной системе имеются все три составляющие ошибки (19.55), зависящие от величины внешних воздействий и от параметров системы. Наиболее нежелательной из них является составляющая  возрастающая пропорционально времени. Поэтому систему необходимо видоизменить в первую очередь так, чтобы уничтожить эту составляющую ошибки, т. е. сделать
возрастающая пропорционально времени. Поэтому систему необходимо видоизменить в первую очередь так, чтобы уничтожить эту составляющую ошибки, т. е. сделать  Для этого можно было бы вовсе изъять дополнительную обратную связь (рис. 19.5), так как при кос
Для этого можно было бы вовсе изъять дополнительную обратную связь (рис. 19.5), так как при кос  согласно (19.59) будет
согласно (19.59) будет  Однако при этом существенно возрастает амплитуда автоколебаний (19.61), т. е. периодическая составляющая ошибки. Поэтому более целесообразной мерой будет замена жесткой обратной связи
Однако при этом существенно возрастает амплитуда автоколебаний (19.61), т. е. периодическая составляющая ошибки. Поэтому более целесообразной мерой будет замена жесткой обратной связи  на гибкую
на гибкую  . Тогда в уравнении (19.54) величина
. Тогда в уравнении (19.54) величина  заменится на
заменится на  :
:

Как видим, составляющая, пропорциональная времени, в правой части уравнения исчезла, вследствие чего установившееся решение для ошибки х в отличие от (19.55), будет

При этом из (19.62) находимз

причем изменяются, конечно, и формулы для  (их можно получить таким же способом). Подбором параметров системы амплитуду автоколебаний ошибки
(их можно получить таким же способом). Подбором параметров системы амплитуду автоколебаний ошибки  можно сделать весьма малой.
можно сделать весьма малой.
Оглавление
- ПРЕДИСЛОВИЕ
- РАЗДЕЛ I. ОБЩИЕ СВЕДЕНИЯ О СИСТЕМАХ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
- § 1.1. Понятие о замкнутых автоматических системах
- § 1.2. Классификация автоматических систем по характеру внутренних динамических процессов
- § 1.3. Примеры непрерывных автоматических систем
- § 1.4. Примеры дискретных и релейных автоматических систем
- ГЛАВА 2. ПРОГРАММЫ И ЗАКОНЫ РЕГУЛИРОВАНИЯ. АДАПТИВНЫЕ СИСТЕМЫ
- § 2.1. Программы регулирования
- § 2.2. Линейные и нелинейные законы регулирования
- § 2.3. Системы с переменной структурой
- § 2.4. Системы с самонастройкой программы (экстремальные системы)
- § 2.5. Системы с самонастройкой параметров (собственно самонастраивающиеся системы)
- § 2.6. Системы с самонастройкой структуры (самоорганизующиеся системы)
- РАЗДЕЛ II. ОБЫКНОВЕННЫЕ ЛИНЕЙНЫЕ СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
- § 3.1. Линеаризация уравнений
- § 3.2. О записи линеаризованных уравнений звеньев
- ГЛАВА 4. ДИНАМИЧЕСКИЕ ЗВЕНЬЯ И ИХ ХАРАКТЕРИСТИКИ
- § 4.2. Временные характеристики
- § 4.3. Частотная передаточная функция и частотные характеристики
- § 4.4. Логарифмические частотные характеристики
- § 4.5. Позиционные звенья
- § 4.6. Интегрирующие звенья
- § 4.7. Дифференцирующие звенья
- § 4.8. Неустойчивые и неминимально-фазовые звенья
- § 4.9. Звенья с модулированным сигналом
- ГЛАВА 5. СОСТАВЛЕНИЕ ИСХОДНЫХ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
- § 5.1. Общий метод составления исходных уравнений
- § 5.2. Передаточные функции систем автоматического регулирования
- § 5.3. Законы регулирования
- § 5.4. Использование структурных схем и графов
- § 5.5. Многомерные системы регулирования
- § 5.6. Управляемость и наблюдаемость
- § 5.7. Уравнения следящей системы
- ГЛАВА 6. КРИТЕРИИ УСТОЙЧИВОСТИ
- § 6.1. Понятие об устойчивости систем регулирования
- § 6.2. Критерий устойчивости Гурвица
- § 6.3. Критерий устойчивости Михайлова
- § 6.4. Построение областей устойчивости. D-разбиение
- § 6.5. Критерий устойчивости Найквиста
- § 6.6. Определение устойчивости по логарифмическим частотным характеристикам
- § 6.7. Устойчивость двумерных систем с антисимметричными связями
- ГЛАВА 7. ПОСТРОЕНИЕ КРИВОЙ ПЕРЕХОДНОГО ПРОЦЕССА В СИСТЕМАХ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
- § 7.2. Непосредственное решение исходного дифференциального уравнения
- § 7.3. Сведение неоднородного уравнения к однородному
- § 7.4. Использование преобразований Фурье, Лапласа и Карсона—Хевиеайда
- § 7.5. Использование вещественных частотных характеристик
- § 7.6. Использование вычислительных машин
- ГЛАВА 8. ОЦЕНКА КАЧЕСТВА РЕГУЛИРОВАНИЯ
- § 8.2. Точность в типовых режимах
- § 8.3. Коэффициенты ошибок
- § 8.4. Определение запаса устойчивости и быстродействия по переходной характеристике
- § 8.5. Приближенная оценка вида переходного процесса по вещественной частотной характеристике
- § 8.6. Корневые методы
- § 8.7. Диаграмма Вышнеградского
- § 8.8. Интегральные оценки
- § 8.9. Частотные критерии качества
- § 8.10. Чувствительность систем регулирования
- ГЛАВА 9. ПОВЫШЕНИЕ ТОЧНОСТИ СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
- § 9.2. Теория инвариантности и комбинированное управление
- § 9.3. Неединичные обратные связи
- ГЛАВА 10. УЛУЧШЕНИЕ КАЧЕСТВА ПРОЦЕССА РЕГУЛИРОВАНИЯ
- § 10.2. Последовательные корректирующие звенья
- § 10.3. Параллельные корректирующие звенья
- § 10.4. Обратные связи
- § 10.5. Методы повышения запаса устойчивости
- § 10.6. Примеры
- ГЛАВА 11. СЛУЧАЙНЫЕ ПРОЦЕССЫ В СИСТЕМАХ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
- § 11.2. Случайные процессы
- § 11.3. Стационарные случайные процессы
- § 11.4. Корреляционная функция
- § 11.5. Спектральная плотность стационарных процессов
- § 11.6. Канонические разложения случайных функций
- § 11.7. Прохождение случайного сигнала через линейную систему
- § 11.8. Расчет установившихся ошибок в автоматических системах
- § 11.9. Расчеты по минимуму среднеквадратичной ошибки
- ГЛАВА 12. МЕТОДЫ СИНТЕЗА СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
- § 12.2. Корневой метод
- § 12.3. Метод корневых годографов
- § 12.4. Метод стандартных переходных характеристик
- § 12.5. Метод логарифмических амплитудных характеристик
- § 12.6. Синтез систем автоматического регулирования на основе частотных критериев качества
- § 12.7. Об оптимальном синтезе
- § 12.8. Использование классических вариационных методов
- § 12.9. Динамическое программирование
- § 12.10. Аналитическое конструирование регуляторов
- РАЗДЕЛ III. ОСОБЫЕ ЛИНЕЙНЫЕ СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
- ГЛАВА 13. СИСТЕМЫ С ПЕРЕМЕННЫМИ ПАРАМЕТРАМИ
- § 13.2. Нахождение функции веса и построение переходных процессов
- § 13.3. Передаточные функции
- § 13.4. Устойчивость и качество регулирования
- § 13.5. О синтезе систем с переменными параметрами
- ГЛАВА 14. СИСТЕМЫ С ЗАПАЗДЫВАНИЕМ И СИСТЕМЫ С РАСПРЕДЕЛЕННЫМИ ПАРАМЕТРАМИ
- § 14.1. Уравнения линейных систем с запаздыванием
- § 14.2. Уравнения линейных систем с распределенными параметрами
- § 14.3. Исследование устойчивости и качества регулирования
- ГЛАВА 15. ИМПУЛЬСНЫЕ СИСТЕМЫ
- § 15.2. Использование z-преобразования
- § 15.3. Передаточные функции
- § 15.4. Устойчивость и качество импульсных систем регулирования
- § 15.5. Случайные процессы в импульсных системах
- РАЗДЕЛ IV. НЕЛИНЕЙНЫЕ СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
- ГЛАВА 16. СОСТАВЛЕНИЕ УРАВНЕНИЙ НЕЛИНЕЙНЫХ СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
- § 16.2. Уравнения систем с нелинейностью релейного типа
- § 16.3. Уравнения систем с нелинейностью в виде сухого трения и зазора
- § 16.4. Уравнения систем с нелинейностями других видов
- ГЛАВА 17. ТОЧНЫЕ МЕТОДЫ ИССЛЕДОВАНИЯ УСТОЙЧИВОСТИ И АВТОКОЛЕБАНИЙ
- § 17.1. Фазовые траектории и метод точечных преобразований
- § 17.2. Теоремы прямого метода Ляпунова и их применение
- § 17.3. Определение автоколебаний релейных систем методом припасовывания
- § 17.4. Частотный метод В. М. Попова
- § 17.5. Исследование систем с переменной структурой
- ГЛАВА 18. ПРИБЛИЖЕННЫЕ МЕТОДЫ ИССЛЕДОВАНИЯ УСТОЙЧИВОСТИ И АВТОКОЛЕБАНИЙ
- § 18.1. Гармоническая линеаризация нелинейностей
- § 18.2. Алгебраические способы определения автоколебаний и устойчивости в нелинейных системах первого класса
- § 18.3. Примеры исследования нелинейных систем первого класса
- § 18.4. Нелинейные системы второго класса
- § 18.5. Вычисление высших гармоник и уточнение первой гармоники автоколебаний
- § 18.6, Частотный метод определения автоколебаний
- ГЛАВА 19. МЕДЛЕННО МЕНЯЮЩИЕСЯ ПРОЦЕССЫ В АВТОКОЛЕБАТЕЛЬНЫХ СИСТЕМАХ
- § 19.1. Статические и скоростные ошибки автоколебательных систем
- § 19.2. Прохождение медленно меняющихся сигналов в автоколебательных системах
- § 19.3. Гармоническая линеаризация нелинейностей при несимметричных колебаниях
- ГЛАВА 20. ОЦЕНКА КАЧЕСТВА НЕЛИНЕЙНЫХ ПРОЦЕССОВ РЕГУЛИРОВАНИЯ
- § 20.1. Приближенное исследование колебательных переходных процессов
- § 20.2. Примеры исследования колебательных переходных процессов
- § 20.3. Система с нелинейным корректирующим устройством
- § 20.4. Применение логарифмических частотных характеристик для исследования нелинейных законов рзгулирования
- ГЛАВА 21. ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ НЕЛИНЕЙНЫХ СИСТЕМ
- § 21.1. Симметричные одночастотные вынужденные колебания
- § 21.2. Несимметричные вынужденные колебания с медленно меняющейся составляющей
- § 21.3. Зависимость устойчивости и качества нелинейных систем от внешних вибраций
- ГЛАВА 22. СЛУЧАЙНЫЕ ПРОЦЕССЫ В НЕЛИНЕЙНЫХ СИСТЕМАХ
- § 22.1. Статистическая линеаризация нелинейностей
- § 22.2. Простейшие случайные процессы в нелинейных системах
- § 22.3. Пример исследования влияния случайных помех на динамику нелинейной системы
- ГЛАВА 23. НЕЛИНЕЙНАЯ ОПТИМИЗАЦИЯ СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
- § 23.2. Синтез оптимальной системы с использованием принципа максимума
- § 23.3. Последовательная оптимизация на базе нелинейного программирования
- РАЗДЕЛ V. ЦИФРОВЫЕ И АДАПТИВНЫЕ СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
- ГЛАВА 24. СИСТЕМЫ РЕГУЛИРОВАНИЯ С ЦИФРОВЫМИ ВЫЧИСЛИТЕЛЬНЫМИ МАШИНАМИ
- § 24.2. О синтезе систем регулирования с ЦВМ
- § 24.3. Дискретная коррекция
- § 24.4. Периодические режимы, обусловленные квантованием по уровню
- ГЛАВА 25. АДАПТИВНЫЕ СИСТЕМЫ
- § 25.1. Системы экстремального регулирования
- § 25.2. Самонастраивающиеся системы
- ПРИЛОЖЕНИЕ 1. ТАБЛИЦА ФУНКЦИЙ
- ПРИЛОЖЕНИЕ 2. ТАБЛИЦА ИНТЕГРАЛОВ
- ЛИТЕРАТУРА
![]()
C1V –
скоростная ошибка, ошибка от скорости.
 С1
С1
– коэффициент скоростной ошибки.
 |
q=1, I
порядок астатизма Данная система называется системой
с астатизмом второго порядка и она содержит в разомкнутой системе 2 и более
интеграторов. ![]()
Определим коэффициент С1 для системы с
первым порядком астатизма

KV – Добротность
системы по скорости.
![]() — статический
— статический
коэффициент усиления позиционной части
разомкнутой системы.
Можно сказать, что общее значение

5.2.3 Режим изменения задающей величины с постоянным
ускорением.
Пусть 
 — ускорение
— ускорение
Чтобы система имела ![]() необходимо,
необходимо,
чтоб С0, С1=0, иначе ошибка будет неограниченно расти.
Установившееся значение ошибки ![]()
С2 – коэффициент ошибки от ускорения
Система с ошибкой от ускорения

 |
Система
с астатизмом второго порядка (q=2), содержит в разомкнутом виде два интегрирующих
звена.
![]() — позиционная часть разомкнутой
— позиционная часть разомкнутой
системы.
Система без ошибки от ускорения
Если в системе С2=0, εв=0, то
это система без ошибки от ускорения.
 |
Система
с астатизмом выше второго порядка
q>2
Свяжем С2 с передаточной функцией
разомкнутой системы

![]() — коэффициент
— коэффициент
усиления позиционной части разомкнутой системы, добротность системы по
ускорению.

5.2.4 Связь астатизма системы с ЛАЧХ разомкнутой
системы.
Порядок астатизма – целое число q, которое равно
порядку в описании входного сигнала ![]() , при котором
, при котором
установившаяся ошибка постоянна и отлична от нуля.
![]()
 1.
1.
 |
 |
||
 2.
2. ![]()
 3.
3. ![]()
 |
q=2
q>2
На практике астатизм выше второго порядка (q>2)
не применяется, поэтому мы их не рассматриваем.
5.2.5 Способы определения порядка астатизма
1. По коэффициентам ошибок
2. По количеству интегрирующих звеньев в передаточной
функции разомкнутой системы.
 — позиционная
— позиционная
часть системы
Система имеет r интеграторов и q=r
3.По наклону ЛАЧХ в низкочастотной области.
Предположим, что передаточная функция разомкнутой
системы имеет вид
 Тогда
Тогда
ЛАЧХ будет иметь следующий вид.
Пусть  , где
, где
![]() — позиционная
— позиционная
часть
 |
Этот случай в жизни практически не встречается
В итоге, астатизм системы определяется по ЛАЧХ
следующим образом
 |
5.2.6 Исследование точности в условиях действия
управляющих и возмущающих сигналов
В общем случае на систему действуют как управляющие
(задающие), так и возмущающие сигналы.