Содержание
- GPS Errors and Biases Part 1
- GPS ephemeris errors
- Selective availability
- Satellite and receiver clock errors
- Multipath error
- Antenna-phase-center variation
- Sources of GPS Error
- Sources of GPS Error
- Sources of GPS Error
GPS Errors and Biases Part 1
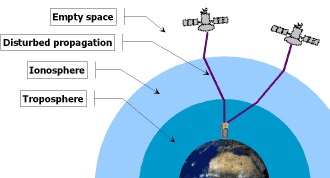
GPS pseudorange and carrier-phase measurements are both affected by several types of random errors and biases (systematic errors). These errors may be classified as those originating at the satellites, those originating at the receiver, and those that are due to signal propagation (atmospheric refraction) [1]. Figure 3.1 shows the various errors and biases.
The errors originating at the satellites include ephemeris, or orbital, errors, satellite clock errors, and the effect of selective availability. The latter was intentionally implemented by the U.S. DoD to degrade the autonomous GPS accuracy for security reasons. It was, however, terminated at midnight (eastern daylight time) on May 1, 2000 [2]. The errors originating at the receiver include receiver clock errors, multipath error, receiver noise, and antenna phase center variations. The signal propagation errors include the delays of the GPS signal as it passes through the ionospheric and tropospheric layers of the atmosphere. In fact, it is only in a vacuum (free space) that the GPS signal travels, or propagates, at the speed of light.
In addition to the effect of these errors, the accuracy of the computed GPS position is also affected by the geometric locations of the GPS satellites as seen by the receiver. The more spread out the satellites are in the sky, the better the obtained accuracy (Figure 3.1).
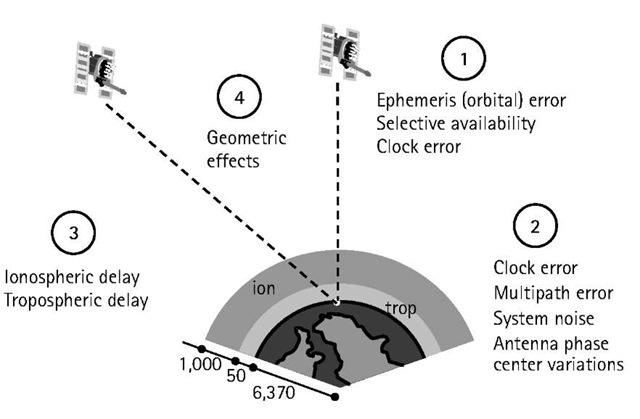
Figure 3.1 GPS errors and biases.
For example, combining L1 and L2 observables removes, to a high degree of accuracy, the effect of the ionosphere. Mathematical modeling of these errors and biases is also possible. In this topic, the main GPS error sources are introduced and the ways of treating them are discussed.
GPS ephemeris errors
Satellite positions as a function of time, which are included in the broadcast satellite navigation message, are predicted from previous GPS observations at the ground control stations. Typically, overlapping 4-hour GPS data spans are used by the operational control system to predict fresh satellite orbital elements for each 1-hour period. As might be expected, modeling the forces acting on the GPS satellites will not in general be perfect, which causes some errors in the estimated satellite positions, known as ephemeris errors. Nominally, an ephemeris error is usually in the order of 2m to 5m, and can reach up to 50m under selective availability [3]. According to [2], the range error due to the combined effect of the ephemeris and the satellite clock errors is of the order of 2.3m [1s-level; s is the standard deviation.
An ephemeris error for a particular satellite is identical to all GPS users worldwide [4]. However, as different users see the same satellite at different view angles, the effect of the ephemeris error on the range measurement, and consequently on the computed position, is different. This means that combining (differencing) the measurements of two receivers simultaneously tracking a particular satellite cannot totally remove the ephemeris error. Users of short separations, however, will have an almost identical range error due to the ephemeris error, which can essentially be removed through differencing the observations. For relative positioning,the following rule of thumb gives a rough estimate of the effect of the ephemeris error on the baseline solution: the baseline error / the baseline length = the satellite position error / the range satellite [5]. This means that if the satellite position error is 5m and the baseline length is 10 km, then the expected baseline line error due to ephemeris error is approximately 2.5 mm.
Some applications, such as studies of the crustal dynamics of the earth, require more precise ephemeris data than the broadcast ephemeris. To support these applications, several institutions [e.g., the International GPS Service for Geodynamics (IGS), the U.S. National Geodetic Survey (NGS), and Geomatics Canada] have developed postmission precise orbital service. Precise ephemeris data is based on GPS data collected at a global GPS network coordinated by the IGS. At the present time, precise ephemeris data is available to users with some delay, which varies from 12 hours for the IGS ultra rapid orbit to about 12 days for the most precise IGS precise orbit. The corresponding accuracies for the two precise orbits are in the order of a few decimeters to 1 decimeter, respectively. Users can download the precise ephemeris data free of charge from the IGS center, at ftp://igscb.jpl.nasa.gov/igscb/product/.
Selective availability
GPS was originally designed so that real-time autonomous positioning and navigation with the civilian C/A code receivers would be less precise than military P-code receivers. Surprisingly, the obtained accuracy was almost the same from both receivers. To ensure national security, the U.S. DoD implemented the so-called selective availability (SA) on Block II GPS satellites to deny accurate real-time autonomous positioning to unauthorized users. SA was officially activated on March 25, 1990 [3].
SA introduces two types of errors [6]. The first one, called delta error, results from dithering the satellite clock, and is common to all users worldwide. The second one, called epsilon error, is an additional slowly varying orbital error. With SA turned on, nominal horizontal and vertical errors can be up to 100m and 156m, respectively, at the 95% probability level. Figure 3.2 shows how the horizontal position of a stationary GPS receiver varies over time, mainly as a result of the effect of SA. Like the range error due to ephemeris error, the range error due to epsilon error is almost identical between users of short separations. Therefore, using differential GPS would overcome the effect of the epsilon error. In fact, DGPS provides better accuracy than the standalone P-code receiver due to the elimination or the reduction of the common errors, including SA [4].
Following extensive studies, the U.S. government discontinued SA on May 1,2000, resulting in a much-improved autonomous GPS accuracy [2]. With the SA turned off, the nominal autonomous GPS horizontal and vertical accuracies would be in the order of 22m and 33m (95% of the time), respectively.
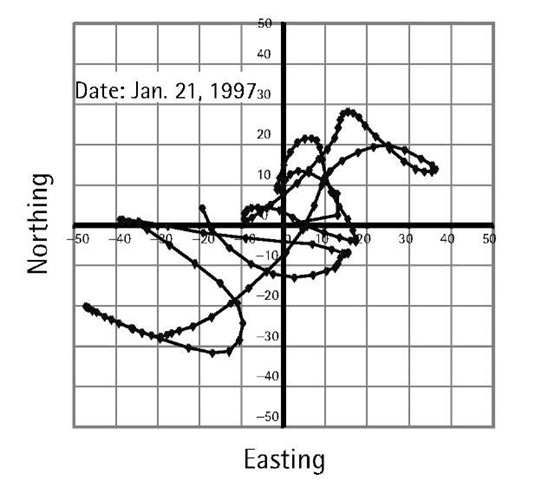
Figure 3.2 Position variation of a stationary GPS receiver due to SA.
Figure 3.3 shows the GPS errors after SA was turned off. The elimination of SA will open the door for faster growth of GPS markets (e.g., vehicle navigation and enhanced-911). Although the removal of SA would have little impact on the DGPS accuracy, it would reduce the cost of installing and operating a DGPS system. This is mainly because of the reduction in the required transmission rate.
Satellite and receiver clock errors
Each GPS Block II and Block IIA satellite contains four atomic clocks, two cesium and two rubidium [7]. The newer generation Block IIR satellites carry rubidium clocks only. One of the onboard clocks, primarily a cesium for Block II and IIA, is selected to provide the frequency and the timing requirements for generating the GPS signals. The others are backups [7].
The GPS satellite clocks, although highly accurate, are not perfect. Their stability is about 1 to 2 parts in 1013 over a period of one day. This means that the satellite clock error is about 8.64 to 17.28 ns per day. The corresponding range error is 2.59m to 5.18m, which can be easily calculated by multiplying the clock error by the speed of light (i.e., 299,729,458 m/s). Cesium clocks tend to behave better over a longer period of time compared with rubidium clocks. In fact, the stability of the cesium clocks over a period of 10 days or more improves to several parts in 1014 [7].
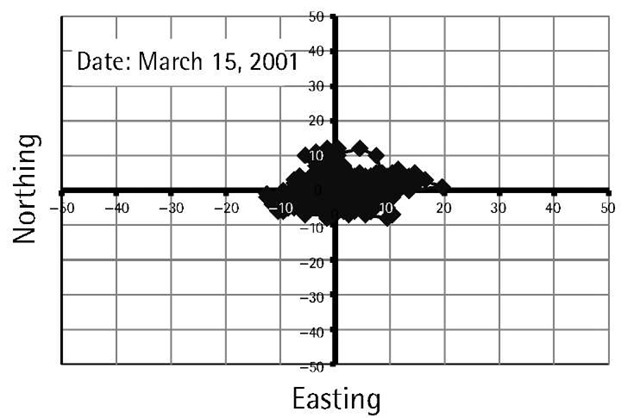
Figure 3.3 Position variation of a stationary GPS receiver after terminating SA.
The performance of the satellite clocks is monitored by the ground control system. The amount of drift is calculated and transmitted as a part of the navigation message in the form of three coefficients of a second-degree polynomial [3, 8].
Satellite clock errors cause additional errors to the GPS measurements. These errors are common to all users observing the same satellite and can be removed through differencing between the receivers. Applying the satellite clock correction in the navigation message can also correct the satellite clock errors. This, however, leaves an error of the order of several nanoseconds, which translates to a range error of a few meters (one nanosecond error is equivalent to a range error of about 30 cm) [4].
GPS receivers, in contrast, use inexpensive crystal clocks, which are much less accurate than the satellite clocks [1]. As such, the receiver clock error is much larger than that ofthe GPS satellite clock. It can, however, be removed through differencing between the satellites or it can be treated as an additional unknown parameter in the estimation process. Precise external clocks (usually cesium or rubidium) are used in some applications instead of the internal receiver clock. Although the external atomic clocks have superior performance compared with the internal receiver clocks, they cost between a few thousand dollars for the rubidium clocks to about $20,000 for the cesium clocks.
Multipath error
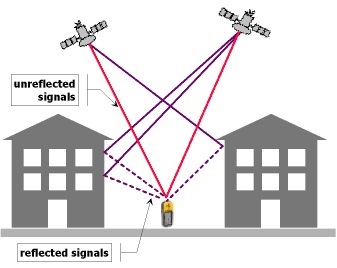
Multipath is a major error source for both the carrier-phase and pseu-dorange measurements. Multipath error occurs when the GPS signal arrives at the receiver antenna through different paths [5]. These paths can be the direct line of sight signal and reflected signals from objects surrounding the receiver antenna (Figure 3.4).
Multipath distorts the original signal through interference with the reflected signals at the GPS antenna. It affects both the carrier-phase and pseudorange measurements; however, its size is much larger in the pseu-dorange measurements. The size of the carrier-phase multipath can reach a maximum value of a quarter of a cycle (about 4.8 cm for the L1 carrier phase). The pseudorange multipath can theoretically reach several tens of meters for the C/A-code measurements. However, with new advances in receiver technology, actual pseudorange multipath is reduced dramatically.
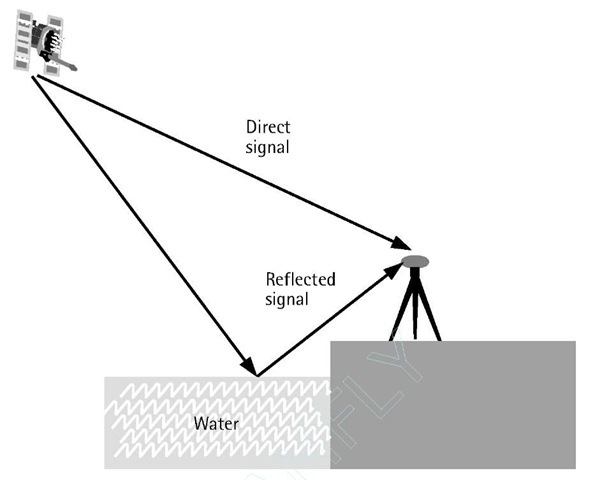
Figure 3.4 Multipath effect.
Examples of such technologies are the Strobe correlator (Ashtech, Inc.) and the MEDLL (NovAtel, Inc.). With these multipath-mitigation techniques, the pseudorange multipath error is reduced to several meters, even in a highly reflective environment [9].
Under the same environment, the presence of multipath errors can be verified using a day-to-day correlation of the estimated residuals [3]. This is because the satellite-reflector-antenna geometry repeats every sidereal day. However, multipath errors in the undifferenced pseudorange measurements can be identified if dual-frequency observations are available. A good general multipath model is still not available, mainly because of the variant satellite-reflector-antenna geometry. There are, however, several options to reduce the effect of multipath. The straightforward option is to select an observation site with no reflecting objects in the vicinity of the receiver antenna. Another option to reduce the effect of multipath is to use a chock ring antenna (a chock ring device is a ground plane that has several concentric metal hoops, which attenuate the reflected signals). As the GPS signal is right-handed circularly polarized while the reflected signal is left-handed, reducing the effect of multipath may also be achieved by using an antenna with a matching polarization to the GPS signal (i.e., right-handed). The disadvantage of this option, however, is that the polarization of the multipath signal becomes right-handed again if it is reflected twice [9].
Antenna-phase-center variation
The point at which the GPS signal is received is called the antenna phase center [3]. Generally, the antenna phase center does not coincide with the physical (geometrical) center of the antenna. It varies depending on the elevation and the azimuth of the GPS satellite as well as the intensity of the observed signal. As a result, additional range error can be expected [3].
The size of the error caused by the antenna-phase-center variation depends on the antenna type, and is typically in the order of a few centimeters. It is, however, difficult to model the antenna-phase-center variation and, therefore, care has to be taken when selecting the antenna type [1]. For short baselines with the same types of antennas at each end, the phase-center error can be canceled if the antennas are oriented in the same direction [11]. Mixing different types of antennas or using different orientations will not cancel the error. Due to its rather small size, this error is neglected in most of the practical GPS applications.
It should be pointed out that phase-center errors could be different on L1 and L2 carrier-phase observations. This can affect the accuracy of the ionosphere free linear combination, particularly when observing short baselines. As mentioned before, for short baselines, the errors are highly correlated over distance and cancel sufficiently through differencing. Therefore, using a single frequency might be more appropriate for short baselines in the static mode.
Источник
Sources of GPS Error
We have seen that the entire system of GPS is dependent on a network of 24 satellites orbiting the earth. While research and development work is still going on to develop more and more accurate systems, it would be a good idea to understand what the exte

Sources of GPS Error
Sources of GPS Error



We have seen that the entire system of GPS is dependent on a network of 24 satellites orbiting the earth. While research and development work is still going on to develop more and more accurate systems, it would be a good idea to understand what the external sources of error are.
What’s a GPS signal?
There are two frequencies of low power radio signals that GPS satellites transmit. These are called L1 and L2. The L1 frequency at 1575.42 MHz in the UHF band is what comes into play for civilian applications. These signals can pass through clouds, glass, plastic and such light objects, but cannot go through more solid objects like buildings and mountains.
Every GPS signal packs three bits of information- these are the pseudorandom code, ephemeris data and almanac data. The pseudorandom code is the identification code of the individual satellite. The ephemeris data identifies the location of each GPS satellite at any particular time of the day. Each satellite transmits this data for the GPS receivers as well as for the other satellites in the network. The almanac data has information about the status of the satellite as well as current date and time. The almanac part of the signal is essential for determining the position.
Possible Causes of Error
Apart from the inaccuracy of the clock in the GPS receiver, there can be other factors that affect the quality of the GPS signal and cause calculation errors. These are:
- Ionosphere and troposphere disturbances: These cause the satellite signal to slow down as it passes through the atmosphere. However the GPS system has a built in model that accounts for an average amount of these disturbances.
- Signal reflection: Here the signal hits and is reflected off objects like tall buildings, rocks etc. This causes the signal to be delayed before it reaches the receiver.
- Ephemeris errors: Ephemeris errors are also known as orbital errors. These are errors in the satellite’s reported position against its actual position.
- Clock errors: The built in clock of the GPS receiver is not as accurate as the atomic clocks of the satellites and the slight timing errors leads to corresponding errors in calculations.
- Visibility of Satellites: The more the number of satellites a GPS receiver can lock with, the better its accuracy. Buildings, rocks and mountains, dense foliage, electronic interference, in short everything that comes in the line of sight cause position errors and sometimes make it unable to take any reading at all. GPS receivers do not work indoors, underwater and underground.
- Satellite Shading: For the signals to work properly the satellites have to be placed at wide angles from each other. Poor geometry resulting from tight grouping can result in signal interference.
- Intentional degradation: This was used till May 2000 by the US Department of Defense so that military adversaries could not use the GPS signals. This has been turned off since May 2000, which has improved the accuracy of readings in civilian equipment.
Источник
Sources of GPS Error
Introduction
We have seen that the entire system of GPS is dependent on a network of 24 satellites orbiting the earth. While research and development work is still going on to develop more and more accurate systems, it would be a good idea to understand what the external sources of error are.
What’s a GPS signal?
There are two frequencies of low power radio signals that GPS satellites transmit. These are called L1 and L2. The L1 frequency at 1575.42 MHz in the UHF band is what comes into play for civilian applications. These signals can pass through clouds, glass, plastic and such light objects, but cannot go through more solid objects like buildings and mountains.
Every GPS signal packs three bits of information- these are the pseudorandom code, ephemeris data and almanac data. The pseudorandom code is the identification code of the individual satellite. The ephemeris data identifies the location of each GPS satellite at any particular time of the day. Each satellite transmits this data for the GPS receivers as well as for the other satellites in the network. The almanac data has information about the status of the satellite as well as current date and time. The almanac part of the signal is essential for determining the position.
Possible Causes of Error
Apart from the inaccuracy of the clock in the GPS receiver, there can be other factors that affect the quality of the GPS signal and cause calculation errors. These are:
- Ionosphere and troposphere disturbances: These cause the satellite signal to slow down as it passes through the atmosphere. However the GPS system has a built in model that accounts for an average amount of these disturbances.
- Signal reflection: Here the signal hits and is reflected off objects like tall buildings, rocks etc. This causes the signal to be delayed before it reaches the receiver.
- Ephemeris errors: Ephemeris errors are also known as orbital errors. These are errors in the satellite’s reported position against its actual position.
- Clock errors: The built in clock of the GPS receiver is not as accurate as the atomic clocks of the satellites and the slight timing errors leads to corresponding errors in calculations.
- Visibility of Satellites: The more the number of satellites a GPS receiver can lock with, the better its accuracy. Buildings, rocks and mountains, dense foliage, electronic interference, in short everything that comes in the line of sight cause position errors and sometimes make it unable to take any reading at all. GPS receivers do not work indoors, underwater and underground.
- Satellite Shading: For the signals to work properly the satellites have to be placed at wide angles from each other. Poor geometry resulting from tight grouping can result in signal interference.
- Intentional degradation: This was used till May 2000 by the US Department of Defense so that military adversaries could not use the GPS signals. This has been turned off since May 2000, which has improved the accuracy of readings in civilian equipment.

Artist’s conception of GPS Block II-F satellite in orbit
The error analysis for the Global Positioning System is important for understanding how GPS works, and for knowing what magnitude of error should be expected. The GPS makes corrections for receiver clock errors and other effects but there are still residual errors which are not corrected. GPS receiver position is computed based on data received from the satellites. Errors depend on geometric dilution of precision and the sources listed in the table below.
Overview[edit]
| Source | Effect (m) |
|---|---|
| Signal arrival C/A | ±3 |
| Signal arrival P(Y) | ±0.3 |
| Ionospheric effects | ±5 |
| Ephemeris errors | ±2.5 |
| Satellite clock errors | ±2 |
| Multipath distortion | ±1 |
| Tropospheric effects | ±0.5 |
 C/A C/A
|
±6.7 |
| P(Y)
|
±6.0 |


Geometric Error Diagram Showing Typical Relation of Indicated Receiver Position, Intersection of Sphere Surfaces, and True Receiver Position in Terms of Pseudorange Errors, PDOP, and Numerical Errors
User equivalent range errors (UERE) are shown in the table. There is also a numerical error with an estimated value,  , of about 1 meter (3 ft 3 in). The standard deviations,
, of about 1 meter (3 ft 3 in). The standard deviations,  , for the coarse/acquisition (C/A) and precise codes are also shown in the table. These standard deviations are computed by taking the square root of the sum of the squares of the individual components (i.e., RSS for root sum squares). To get the standard deviation of receiver position estimate, these range errors must be multiplied by the appropriate dilution of precision terms and then RSS’ed with the numerical error. Electronics errors are one of several accuracy-degrading effects outlined in the table above. When taken together, autonomous civilian GPS horizontal position fixes are typically accurate to about 15 meters (50 ft). These effects also reduce the more precise P(Y) code’s accuracy. However, the advancement of technology means that in the present, civilian GPS fixes under a clear view of the sky are on average accurate to about 5 meters (16 ft) horizontally.
, for the coarse/acquisition (C/A) and precise codes are also shown in the table. These standard deviations are computed by taking the square root of the sum of the squares of the individual components (i.e., RSS for root sum squares). To get the standard deviation of receiver position estimate, these range errors must be multiplied by the appropriate dilution of precision terms and then RSS’ed with the numerical error. Electronics errors are one of several accuracy-degrading effects outlined in the table above. When taken together, autonomous civilian GPS horizontal position fixes are typically accurate to about 15 meters (50 ft). These effects also reduce the more precise P(Y) code’s accuracy. However, the advancement of technology means that in the present, civilian GPS fixes under a clear view of the sky are on average accurate to about 5 meters (16 ft) horizontally.
The term user equivalent range error (UERE) refers to the error of a component in the distance from receiver to a satellite. These UERE errors are given as ± errors thereby implying that they are unbiased or zero mean errors. These UERE errors are therefore used in computing standard deviations. The standard deviation of the error in receiver position,
 , is computed by multiplying PDOP (Position Dilution Of Precision) by
, is computed by multiplying PDOP (Position Dilution Of Precision) by
, the standard deviation of the user equivalent range errors.
is computed by taking the square root of the sum of the squares of the individual component standard deviations.
PDOP is computed as a function of receiver and satellite positions. A detailed description of how to calculate PDOP is given in the section Geometric dilution of precision computation (GDOP).
for the C/A code is given by:

The standard deviation of the error in estimated receiver position , again for the C/A code is given by:

The error diagram on the left shows the inter relationship of indicated receiver position, true receiver position, and the intersection of the four sphere surfaces.
Signal arrival time measurement[edit]
The position calculated by a GPS receiver requires the current time, the position of the satellite and the measured delay of the received signal. The position accuracy is primarily dependent on the satellite position and signal delay.
To measure the delay, the receiver compares the bit sequence received from the satellite with an internally generated version. By comparing the rising and trailing edges of the bit transitions, modern electronics can measure signal offset to within about one percent of a bit pulse width,  , or approximately 10 nanoseconds for the C/A code. Since GPS signals propagate at the speed of light, this represents an error of about 3 meters.
, or approximately 10 nanoseconds for the C/A code. Since GPS signals propagate at the speed of light, this represents an error of about 3 meters.
This component of position accuracy can be improved by a factor of 10 using the higher-chiprate P(Y) signal. Assuming the same one percent of bit pulse width accuracy, the high-frequency P(Y) signal results in an accuracy of  or about 30 centimeters.
or about 30 centimeters.
Atmospheric effects[edit]
Inconsistencies of atmospheric conditions affect the speed of the GPS signals as they pass through the Earth’s atmosphere, especially the ionosphere. Correcting these errors is a significant challenge to improving GPS position accuracy. These effects are smallest when the satellite is directly overhead and become greater for satellites nearer the horizon since the path through the atmosphere is longer (see airmass). Once the receiver’s approximate location is known, a mathematical model can be used to estimate and compensate for these errors.
Ionospheric delay of a microwave signal depends on its frequency. It arises from ionized atmosphere (see Total electron content). This phenomenon is known as dispersion and can be calculated from measurements of delays for two or more frequency bands, allowing delays at other frequencies to be estimated.[1] Some military and expensive survey-grade civilian receivers calculate atmospheric dispersion from the different delays in the L1 and L2 frequencies, and apply a more precise correction. This can be done in civilian receivers without decrypting the P(Y) signal carried on L2, by tracking the carrier wave instead of the modulated code. To facilitate this on lower cost receivers, a new civilian code signal on L2, called L2C, was added to the Block IIR-M satellites, which was first launched in 2005. It allows a direct comparison of the L1 and L2 signals using the coded signal instead of the carrier wave.
The effects of the ionosphere generally change slowly, and can be averaged over time. Those for any particular geographical area can be easily calculated by comparing the GPS-measured position to a known surveyed location. This correction is also valid for other receivers in the same general location. Several systems send this information over radio or other links to allow L1-only receivers to make ionospheric corrections. The ionospheric data are transmitted via satellite in Satellite Based Augmentation Systems (SBAS) such as Wide Area Augmentation System (WAAS) (available in North America and Hawaii), EGNOS (Europe and Asia), Multi-functional Satellite Augmentation System (MSAS) (Japan), and GPS Aided Geo Augmented Navigation (GAGAN) (India) which transmits it on the GPS frequency using a special pseudo-random noise sequence (PRN), so only one receiver and antenna are required.
Humidity also causes a variable delay, resulting in errors similar to ionospheric delay, but occurring in the troposphere. This effect is more localized than ionospheric effects, changes more quickly and is not frequency dependent. These traits make precise measurement and compensation of humidity errors more difficult than ionospheric effects.[2]
The Atmospheric pressure can also change the signals reception delay, due to the dry gases present at the troposphere (78% N2, 21% O2, 0.9% Ar…). Its effect varies with local temperature and atmospheric pressure in quite a predictable manner using the laws of the ideal gases.[3]
Multipath effects[edit]
GPS signals can also be affected by multipath issues, where the radio signals reflect off surrounding terrain; buildings, canyon walls, hard ground, etc. These delayed signals cause measurement errors that are different for each type of GPS signal due to its dependency on the wavelength.[4]
A variety of techniques, most notably narrow correlator spacing, have been developed to mitigate multipath errors. For long delay multipath, the receiver itself can recognize the wayward signal and discard it. To address shorter delay multipath from the signal reflecting off the ground, specialized antennas (e.g., a choke ring antenna) may be used to reduce the signal power as received by the antenna. Short delay reflections are harder to filter out because they interfere with the true signal, causing effects almost indistinguishable from routine fluctuations in atmospheric delay.
Multipath effects are much less severe in moving vehicles. When the GPS antenna is moving, the false solutions using reflected signals quickly fail to converge and only the direct signals result in stable solutions.
Ephemeris and clock errors[edit]
While the ephemeris data is transmitted every 30 seconds, the information itself may be up to two hours old. Variability in solar radiation pressure[5] has an indirect effect on GPS accuracy due to its effect on ephemeris errors. If a fast time to first fix (TTFF) is needed, it is possible to upload a valid ephemeris to a receiver, and in addition to setting the time, a position fix can be obtained in under ten seconds. It is feasible to put such ephemeris data on the web so it can be loaded into mobile GPS devices.[6] See also Assisted GPS.
The satellites’ atomic clocks experience noise and clock drift errors. The navigation message contains corrections for these errors and estimates of the accuracy of the atomic clock. However, they are based on observations and may not indicate the clock’s current state.
These problems tend to be very small, but may add up to a few meters (tens of feet) of inaccuracy.[7]
For very precise positioning (e.g., in geodesy), these effects can be eliminated by differential GPS: the simultaneous use of two or more receivers at several survey points. In the 1990s when receivers were quite expensive, some methods of quasi-differential GPS were developed, using only one receiver but reoccupation of measuring points. At the TU Vienna the method was named qGPS and post processing software was developed.[citation needed]
Dilution of precision [edit]
Selective availability[edit]
GPS included a (currently disabled) feature called Selective Availability (SA) that adds intentional, time varying errors of up to 100 meters (328 ft) to the publicly available navigation signals. This was intended to deny an enemy the use of civilian GPS receivers for precision weapon guidance.
SA errors are actually pseudorandom, generated by a cryptographic algorithm from a classified seed key available only to authorized users (the U.S. military, its allies and a few other users, mostly government) with a special military GPS receiver. Mere possession of the receiver is insufficient; it still needs the tightly controlled daily key.
Before it was turned off on May 2, 2000, typical SA errors were about 50 m (164 ft) horizontally and about 100 m (328 ft) vertically.[8] Because SA affects every GPS receiver in a given area almost equally, a fixed station with an accurately known position can measure the SA error values and transmit them to the local GPS receivers so they may correct their position fixes. This is called Differential GPS or DGPS. DGPS also corrects for several other important sources of GPS errors, particularly ionospheric delay, so it continues to be widely used even though SA has been turned off. The ineffectiveness of SA in the face of widely available DGPS was a common argument for turning off SA, and this was finally done by order of President Clinton in 2000.[9]
DGPS services are widely available from both commercial and government sources. The latter include WAAS and the U.S. Coast Guard’s network of LF marine navigation beacons. The accuracy of the corrections depends on the distance between the user and the DGPS receiver. As the distance increases, the errors at the two sites will not correlate as well, resulting in less precise differential corrections.
During the 1990–91 Gulf War, the shortage of military GPS units caused many troops and their families to buy readily available civilian units. Selective Availability significantly impeded the U.S. military’s own battlefield use of these GPS, so the military made the decision to turn it off for the duration of the war.
In the 1990s, the FAA started pressuring the military to turn off SA permanently. This would save the FAA millions of dollars every year in maintenance of their own radio navigation systems. The amount of error added was «set to zero»[10] at midnight on May 1, 2000 following an announcement by U.S. President Bill Clinton, allowing users access to the error-free L1 signal. Per the directive, the induced error of SA was changed to add no error to the public signals (C/A code). Clinton’s executive order required SA to be set to zero by 2006; it happened in 2000 once the U.S. military developed a new system that provides the ability to deny GPS (and other navigation services) to hostile forces in a specific area of crisis without affecting the rest of the world or its own military systems.[10]
On 19 September 2007, the United States Department of Defense announced that future GPS III satellites will not be capable of implementing SA,[11] eventually making the policy permanent.[12]
Anti-spoofing[edit]
Another restriction on GPS, antispoofing, remains on. This encrypts the P-code so that it cannot be mimicked by a transmitter sending false information. Few civilian receivers have ever used the P-code, and the accuracy attainable with the public C/A code was much better than originally expected (especially with DGPS), so much so that the antispoof policy has relatively little effect on most civilian users. Turning off antispoof would primarily benefit surveyors and some scientists who need extremely precise positions for experiments such as tracking tectonic plate motion.
Relativity[edit]
Theory of Relativity introduces several effects that need to be taken into account when dealing with precise time measurements. First, according to special relativity time passes differently for objects in relative motion. That is known as «kinetic» time dilation: in an inertial reference frame, the faster an object moves, the slower its time appears to pass
(as measured by the frame’s clocks). General relativity takes into account also the effects that gravity has on the passage of time. In the context of GPS the most prominent correction introduced by general relativity is gravitational time dilation: the clocks located deeper in the gravitational potential well (i.e. closer to the attracting body) appear to tick slower.
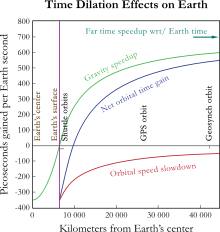
Satellite clocks are slowed by their orbital speed but sped up by their distance out of the Earth’s gravitational well.
Special Relativity (SR)[edit]
SR predicts that as the velocity of an object increases (in a given frame), it’s time slows down (as measured in that frame). For instance, the frequency of the atomic clocks moving at GPS orbital speeds will tick more slowly than stationary clocks by a factor of  where the orbital velocity is v = 4 km/s and c = the speed of light. The result is an error of about -7.2 μs/day in the satellite. The SR effect is due to the constant movement of GPS clocks relative to the Earth-centered, non-rotating approximately inertial reference frame. In short, the clocks on the satellites are slowed down by the velocity of the satellite. This time dilation effect has been measured and verified using the GPS.
where the orbital velocity is v = 4 km/s and c = the speed of light. The result is an error of about -7.2 μs/day in the satellite. The SR effect is due to the constant movement of GPS clocks relative to the Earth-centered, non-rotating approximately inertial reference frame. In short, the clocks on the satellites are slowed down by the velocity of the satellite. This time dilation effect has been measured and verified using the GPS.
General Relativity (GR)[edit]
SR allows to compare clocks only in a flat spacetime, which neglects gravitational effects on the passage of time. According to GR, the presence of gravitating bodies (like Earth) curves spacetime, which makes comparing clocks not as straightforward as in SR. However, one can often account for most of the discrepancy by the introduction of gravitational time dilation, the slowing down of time near gravitating bodies. In case of the GPS, the receivers are closer to Earth than the satellites, causing the locks at the altitude of the satellite to be faster by a factor of 5×10−10, or about +45.8 μs/day. This gravitational frequency shift is measurable. During early development some believed that GPS would not be affected by GR effects, but the Hafele–Keating experiment showed it would be.
Combined kinetic and gravitational time dilations[edit]
Combined, these sources of time dilation cause the clocks on the satellites count extra +38 microseconds per day, compared to the clocks on the ground. This is a difference of 4.465 parts in 1010.[13] Without correction, errors of roughly 11.4 km/day would accumulate in the position.[14] This initial pseudorange error is corrected in the process of solving the navigation equations. In addition, the elliptical, rather than perfectly circular, satellite orbits cause the time dilation and gravitational frequency shift effects to vary with time. This eccentricity effect causes the clock rate difference between a GPS satellite and a receiver to increase or decrease depending on the altitude of the satellite.
| Time dilation | Value | Notes |
|---|---|---|
| Kinetic | -7.2 μs/day | Clocks slowed in satellites due to Velocity |
| Gravitational | +45.8 μs/day | Clocks sped up in satellites due to higher altitude |
| Total (Combined) | +38.6 μs/day |
To compensate for the discrepancy, the frequency standard on board each satellite is given a rate offset prior to launch, making it run slightly slower than the desired frequency on Earth; specifically, at 10.22999999543 MHz instead of 10.23 MHz.[15] Since the atomic clocks on board the GPS satellites are precisely tuned, it makes the system a practical engineering application of the scientific theory of relativity in a real-world environment.[16] Placing atomic clocks on artificial satellites to test Einstein’s general theory was proposed by Friedwardt Winterberg in 1955.[17]
Calculations[edit]
To calculate the amount of daily time dilation experienced by GPS satellites relative to Earth we need to separately determine the amounts due to satellite’s velocity and altitude, and add them together.
Kinetic time dilation[edit]
The amount due to velocity will be determined using the Lorentz transformation. The time measured by an object moving with velocity  changes by (the inverse of) the Lorentz factor:
changes by (the inverse of) the Lorentz factor:

For small values of v/c this approximates to:

The GPS satellites move at 3874 m/s relative to Earth’s center.[15] We thus determine:

This difference of 8.349×10−11 represents the fraction by which the satellites’ clocks tick slower than the stationary clocks. It is then multiplied by the number of nanoseconds in a day:

That is the satellites’ clocks lose 7214 nanoseconds a day due to their velocity.
- Note that this speed of 3874 m/s is measured relative to Earth’s center rather than its surface where the GPS receivers (and users) are. This is because Earth’s equipotential makes net time dilation equal across its geodesic surface.[18] That is, the combination of Special and General effects make the net time dilation at the equator equal to that of the poles, which in turn are at rest relative to the center. Hence we use the center as a reference point to represent the entire surface.
Gravitational time dilation[edit]
The amount of dilation due to gravity will be determined using the gravitational time dilation equation:

where  is the time passed at a distance
is the time passed at a distance  from the center of the Earth and
from the center of the Earth and  is the time passed for a far away observer.
is the time passed for a far away observer.
For small values of  this approximates to:
this approximates to:

Determine the difference  between the satellite’s time
between the satellite’s time  and Earth time
and Earth time  :
:

Earth has a radius of 6,357 km (at the poles) making  = 6,357,000 m and the satellites have an altitude of 20,184 km[15] making their orbit radius
= 6,357,000 m and the satellites have an altitude of 20,184 km[15] making their orbit radius  = 26,541,000 m. Substituting these in the above equation, with Earth mass M = 5.974×1024, G = 6.674×10−11, and c = 2.998×108 (all in SI units), gives:
= 26,541,000 m. Substituting these in the above equation, with Earth mass M = 5.974×1024, G = 6.674×10−11, and c = 2.998×108 (all in SI units), gives:

This represents the fraction by which the clocks at satellites’ altitude tick faster than on the surface of the Earth. It is then multiplied by the number of nanoseconds in a day:

That is the satellites’ clocks gain 45850 nanoseconds a day due to gravitational time dilation.
Combined time dilation effects[edit]
These effects are added together to give (rounded to 10 ns):
- 45850 – 7210 = 38640 ns
Hence the satellites’ clocks gain approximately 38,640 nanoseconds a day or 38.6 μs per day due to relativity effects in total.
In order to compensate for this gain, a GPS clock’s frequency needs to be slowed by the fraction:
- 5.307×10−10 – 8.349×10−11 = 4.472×10−10
This fraction is subtracted from 1 and multiplied by the pre-adjusted clock frequency of 10.23 MHz:
- (1 – 4.472×10−10) × 10.23 = 10.22999999543
That is we need to slow the clocks down from 10.23 MHz to 10.22999999543 MHz in order to negate both time dilation effects.
Sagnac distortion[edit]
GPS observation processing must also compensate for the Sagnac effect. The GPS time scale is defined in an inertial system but observations are processed in an Earth-centered, Earth-fixed (co-rotating) system. A coordinate transformation is thus applied to convert from the inertial system to the ECEF system. The resulting signal run time correction has opposite algebraic signs for satellites in the Eastern and Western celestial hemispheres. Ignoring this effect will produce an east–west error on the order of hundreds of nanoseconds, or tens of meters in position.[19]
Natural sources of interference[edit]
Since GPS signals at terrestrial receivers tend to be relatively weak, natural radio signals or scattering of the GPS signals can desensitize the receiver, making acquiring and tracking the satellite signals difficult or impossible.
Space weather degrades GPS operation in two ways, direct interference by solar radio burst noise in the same frequency band[20] or by scattering of the GPS radio signal in ionospheric irregularities referred to as scintillation.[21] Both forms of degradation follow the 11 year solar cycle and are a maximum at sunspot maximum although they can occur at any time. Solar radio bursts are associated with solar flares and coronal mass ejections (CMEs)[22] and their impact can affect reception over the half of the Earth facing the sun. Scintillation occurs most frequently at tropical latitudes where it is a night time phenomenon. It occurs less frequently at high latitudes or mid-latitudes where magnetic storms can lead to scintillation.[23] In addition to producing scintillation, magnetic storms can produce strong ionospheric gradients that degrade the accuracy of SBAS systems.[24]
Artificial sources of interference[edit]
In automotive GPS receivers, metallic features in windshields,[25] such as defrosters, or car window tinting films[26] can act as a Faraday cage, degrading reception just inside the car.
Man-made EMI (electromagnetic interference) can also disrupt or jam GPS signals. In one well-documented case it was impossible to receive GPS signals in the entire harbor of Moss Landing, California due to unintentional jamming caused by malfunctioning TV antenna preamplifiers.[27][28] Intentional jamming is also possible. Generally, stronger signals can interfere with GPS receivers when they are within radio range or line of sight. In 2002 a detailed description of how to build a short-range GPS L1 C/A jammer was published in the online magazine Phrack.[29]
The U.S. government reported that such jammers were used occasionally during the War in Afghanistan, and the U.S. military destroyed six GPS jammers during the Iraq War, including one that was destroyed with a GPS-guided bomb, noting the ineffectiveness of the jammers used in that situation.[30] A GPS jammer is relatively easy to detect and locate, making it an attractive target for anti-radiation missiles. The UK Ministry of Defence tested a jamming system in the UK’s West Country on 7 and 8 June 2007.[citation needed]
Some countries allow the use of GPS repeaters to allow the reception of GPS signals indoors and in obscured locations; while in other countries these are prohibited as the retransmitted signals can cause multi-path interference to other GPS receivers that receive data from both GPS satellites and the repeater. In the UK Ofcom now permits the use of GPS/GNSS Repeaters[31] under a ‘light licensing’ regime.
Due to the potential for both natural and man-made noise, numerous techniques continue to be developed to deal with the interference. The first is to not rely on GPS as a sole source. According to John Ruley, «IFR pilots should have a fallback plan in case of a GPS malfunction».[32] Receiver Autonomous Integrity Monitoring (RAIM) is a feature included in some receivers, designed to provide a warning to the user if jamming or another problem is detected. The U.S. military has also deployed since 2004 their Selective Availability / Anti-Spoofing Module (SAASM) in the Defense Advanced GPS Receiver (DAGR).[33] In demonstration videos the DAGR was shown to detect jamming and maintain its lock on the encrypted GPS signals during interference which caused civilian receivers to lose lock.
See also[edit]
- GPS augmentation
Notes[edit]
- ^ The same principle, and the math behind it, can be found in descriptions of pulsar timing by astronomers.
- ^ Navipedia: Troposphere Monitoring
- ^ Navipedia: Tropospheric Delay
- ^ Navipedia: Multipath
- ^ «IPN Progress Report 42-159 (2004)» (PDF).
- ^ SNT080408. «Ephemeris Server Example». Tdc.co.uk. Archived from the original on January 12, 2009. Retrieved 2009-10-13.
- ^ «Unit 1 – Introduction to GPS». Archived from the original on April 29, 2009.
- ^ Grewal (2001), p. 103.
- ^ «President Clinton Orders the Cessation of GPS Selective Availability».
- ^ a b «Statement by the President regarding the United States’ Decision to Stop Degrading Global Positioning System Accuracy». Federal Aviation Administration. May 1, 2000. Archived from the original on 2011-10-21. Retrieved 2013-01-04.
- ^ «DoD Permanently Discontinues Procurement Of Global Positioning System Selective Availability». DefenseLink. September 18, 2007. Archived from the original on February 18, 2008. Retrieved 2008-02-20.
- ^ «Selective Availability». National space-based Positioning, Navigation, and Timing Executive Committee. Archived from the original on January 13, 2008. Retrieved 2008-02-20.
- ^ Rizos, Chris. University of New South Wales. GPS Satellite Signals Archived 2010-06-12 at the Wayback Machine. 1999.
- ^ Faraoni, Valerio (2013). Special Relativity (illustrated ed.). Springer Science & Business Media. p. 54. ISBN 978-3-319-01107-3. Extract of page 54
- ^ a b c The Global Positioning System by Robert A. Nelson Via Satellite Archived 2010-07-18 at the Wayback Machine, November 1999
- ^ Pogge, Richard W.; «Real-World Relativity: The GPS Navigation System». Retrieved 25 January 2008.
- ^ «Astronautica Acta II, 25 (1956)». 1956-08-10. Retrieved 2009-10-23.
- ^ S. P. Drake (January 2006). «The equivalence principle as a stepping stone from special to general relativity» (PDF). Am. J. Phys., Vol. 74, No. 1. pp. 22–25.
- ^ Ashby, Neil Relativity and GPS. Physics Today, May 2002.
- ^ Cerruti, A., P. M. Kintner, D. E. Gary, A. J. Mannucci, R. F. Meyer, P. H. Doherty, and A. J. Coster (2008), Effect of intense December 2006 solar radio bursts on GPS receivers, Space Weather, doi:10.1029/2007SW000375, October 19, 2008
- ^ Aarons, Jules; Basu, Santimay (1994). «Ionospheric amplitude and phase fluctuations at the GPS frequencies». Proceedings of ION GPS. 2: 1569–1578.
- ^ S. Mancuso and J. C. Raymond, «Coronal transients and metric type II radio bursts. I. Effects of geometry, 2004, Astronomy and Astrophysics, v.413, p.363-371′
- ^ Ledvina, B. M.; J. J. Makela & P. M. Kintner (2002). «First observations of intense GPS L1 amplitude scintillations at midlatitude». Geophysical Research Letters. 29 (14): 1659. Bibcode:2002GeoRL..29.1659L. doi:10.1029/2002GL014770. S2CID 133701419.
- ^ Tom Diehl, Solar Flares Hit the Earth- WAAS Bends but Does Not Break, SatNav News, volume 23, June 2004.
- ^ «I-PASS Mounting for Vehicles with Special Windshield Features» (PDF). Archived from the original (PDF) on March 26, 2010.
- ^ «3M Automotive Films».. Note that the ‘Color Stable’ films are specifically described as not interfering with satellite signals.
- ^ «The Hunt for RFI». GPS World. 1 January 2003.
- ^ «EMC compliance club «banana skins» column 222″. Compliance-club.com. Retrieved 2009-10-13.
- ^ Low Cost and Portable GPS Jammer. Phrack issue 0x3c (60), article 13. Published December 28, 2002.
- ^ American Forces Press Service. Centcom charts progress. March 25, 2003. Archived December 3, 2009, at the Wayback Machine
- ^ [1] Ofcom Statement on Authorisation regime for GNSS repeaters
- ^ Ruley, John. AVweb. GPS jamming. February 12, 2003.
- ^ US Army DAGR page Archived 2012-08-05 at archive.today
References[edit]
- Grewal, Mohinder S.; Weill, Lawrence Randolph; Andrews, Angus P. (2001). Global positioning systems, inertial navigation, and integration. John Wiley and Sons. ISBN 978-0-471-35032-3.
- Parkinson; Spilker (1996). The global positioning system. American Institute of Aeronautics & Astronomy. ISBN 978-1-56347-106-3.
- Webb, Stephen (2004). Out of this world: colliding universes, branes, strings, and other wild ideas of modern physics. Springer. ISBN 0-387-02930-3. Retrieved 2013-08-16.
External links[edit]
- GPS.gov—General public education website created by the U.S. Government
- GPS SPS Performance Standard—The official Standard Positioning Service specification (2008 version).
- GPS SPS Performance Standard—The official Standard Positioning Service specification (2001 version).
- Satellite Geometry
- Satellite Orbits
- Multipath Effect
- Atmospheric Effects
- Clock Inaccuracies and Rounding Errors
1. Satellite Errors:
- Slight inaccuracies in time keeping by the satellites can cause errors in calculating positions.
- Satellites drift slightly from their predicted orbits which contributes to errors.
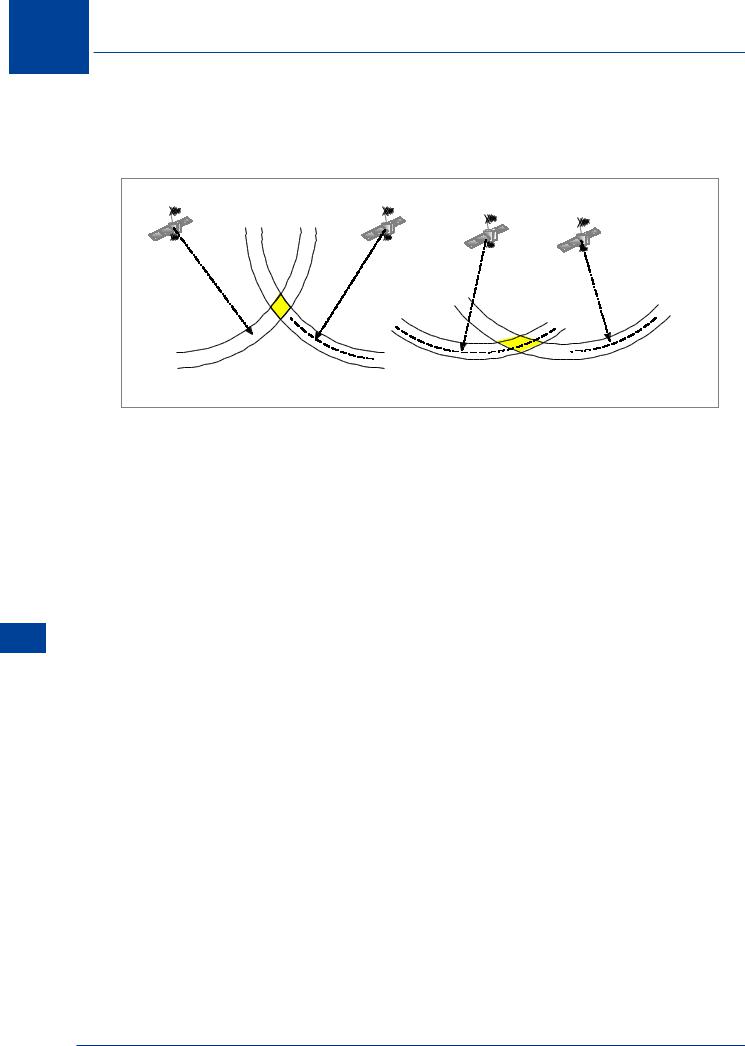
Let the GPS receiver receive signals from 4 satellites, then there are two cases:
CASE 1
The satellites are at 90° to each other w.r.t the GPS receiver. For demonstration purpose we will take 2 satellites. The possible positions are marked by the light green circles. The point of intersection of the two circles is a rather small, more or less quadratic field (dark green), the determined position will be rather accurate.
CASE 2
The satellites are not at 90° to each other w.r.t the GPS receiver, the possible intersection area of the two circles is rather larger hence less accurate.
2. Satellite Orbits
Slight shifts of the orbits are possible due to gravitation forces
- Sun and moon have a weak influence on the orbits
- The resulting error being not more than 2 m
3. Multi-path error:
 As the GPS signal finally arrives at the earth’s surface, it may be reflected by local obstructions before it gets to the receiver’s antenna. This is called multi-path error as the signal is reaching the antenna in single line path as well as delayed path. The effect is similar to a double image on a tv set.
As the GPS signal finally arrives at the earth’s surface, it may be reflected by local obstructions before it gets to the receiver’s antenna. This is called multi-path error as the signal is reaching the antenna in single line path as well as delayed path. The effect is similar to a double image on a tv set.
The multipath effect is caused by reflection of satellite signals (radio waves) on objects. For GPS signals this effect mainly appears in the neighborhood of large buildings or other elevations. The reflected signal takes more time to reach the receiver than the direct signal. The resulting error typically lies in the range of a few meters.
4. Atmospheric Effects :
The GPS signals have to travel through charged particles and water vapors in the atmosphere which delays its transmission. Since the atmosphere varies at different places and at different times, it is not possible to accurately compensate for the delays that occur.
 While radio signals travel with the velocity of light in the outer space, their propagation in the ionosphere and troposphere is slower. In the ionosphere (consisting of layers) in a height of 80 – 400 km a large number of electrons and positive charged ions are formed by the ionizing force of the sun. The layers refract the electromagnetic waves from the satellites, resulting in an elongated runtime of the signals. Since the Electromagnetic waves emit in form of a sphere, therefore, Inverse square law is employed and the waves are slowed down inversely proportional to the square of their frequency (1/f2) while passing the ionosphere. The reasons for the refraction in troposphere are different concentrations of water vapors, caused by different weather conditions. The error caused that way is smaller than the ionosphere error, but cannot be eliminated by calculation. It can only be approximated by a general calculation model.
While radio signals travel with the velocity of light in the outer space, their propagation in the ionosphere and troposphere is slower. In the ionosphere (consisting of layers) in a height of 80 – 400 km a large number of electrons and positive charged ions are formed by the ionizing force of the sun. The layers refract the electromagnetic waves from the satellites, resulting in an elongated runtime of the signals. Since the Electromagnetic waves emit in form of a sphere, therefore, Inverse square law is employed and the waves are slowed down inversely proportional to the square of their frequency (1/f2) while passing the ionosphere. The reasons for the refraction in troposphere are different concentrations of water vapors, caused by different weather conditions. The error caused that way is smaller than the ionosphere error, but cannot be eliminated by calculation. It can only be approximated by a general calculation model.
Receiver Error:
Since the receivers are also not perfect, they can introduce their own errors which usually occur from their clocks or internal noise. Despite the synchronization of the receiver clock with the satellite time during the position determination, the remaining inaccuracy of the time still leads to an error of about 2 m in the position determination. Rounding and calculation errors of the receiver sum up approximately to 1 m.
|
Error |
VALUE (Approx) |
|
Ionosphere |
4.0 meters |
|
Clock |
2.1 meters |
|
Orbit |
2.1 meters |
|
Troposphere |
0.7 meters |
|
Receiver |
0.5 meters |
|
Multipath |
1.0 meter |
|
TOTAL |
10.4 meters |
Selective Availability:
- Selective availability (SA) was the intentional error introduced by DoD to make sure that no hostile forces used the accuracy of GPS against the US or its allies.
- On May 1st, 2000, the White House announced a decision to discontinue the intentional degradation of the GPS signals to the public. Civilian users of GPS will be able to pinpoint locations up to ten times more accurately.
Methods of Correcting GPS Errors
- Real Time Correction
- Post-Processing Correction
- Satellite Differential Services
Real Time Correction
- The base station calculates and broadcasts corrections for each satellite as it receives the data.
- The correction is received by the roving receiver via a radio signal and applied to the position it is calculating.
- As a result, the position displayed on the roving GPS receiver is a differentially corrected position.
Post Processing Correction
- Differentially correcting GPS data by post-processing uses a base GPS receiver that logs positions at a known location and a rover GPS receiver that collects positions in the field.
- The files from the base and rover are transferred to the office processing software, which computes corrected positions for the rover’s file.
- This resulting corrected file can be viewed in or exported to a GIS.
![]() Print
Print
Try this thought experiment (Wormley, 2004): Attach your GPS receiver to a tripod. Turn it on and record its position every ten minutes for 24 hours. Next day, plot the 144 coordinates your receiver calculated. What do you suppose the plot would look like?
Do you imagine a cloud of points scattered around the actual location? That’s a reasonable expectation. Now, imagine drawing a circle or ellipse that encompasses about 95 percent of the points. What would the radius of that circle or ellipse be? (In other words, what is your receiver’s positioning error?)
The answer depends in part on your receiver. If you used a very low cost GPS receiver, the radius of the circle you drew might be as much as ten meters to capture 95 percent of the points. If you used a slightly more expensive WAAS-enabled single frequency receiver, your error ellipse might shrink to one to three meters or so (WAAS makes use of both the satellite signals and a network of ground reference stations to increase accuracy; for more on WAAS, see the FAA WAAS site). But, if you were to invest several thousand dollars in a dual frequency, survey-grade receiver, your error circle radius might be as small as a centimeter or less. In general, GPS users get what they pay for.
As the market for GPS positioning grows, receivers are becoming cheaper. Still, there are lots of mapping applications for which it’s not practical to use a survey-grade unit. For example, if your assignment was to GPS 1,000 manholes for your municipality, you probably wouldn’t want to set up and calibrate a survey-grade receiver 1,000 times. How, then, can you minimize errors associated with mapping-grade receivers? A sensible start is to understand the sources of GPS error.
5.3.1 User Equivalent Range Errors
User Equivalent Range Errors (UERE) are those that relate to the timing and path readings of the satellites due to anomalies in the hardware or interference from the atmosphere. A complete list of the sources of User Equivalent Range Errors, in descending order of their contributions to the total error budget, is below:
- Satellite clock: GPS position calculations, as discussed above, depend on measuring signal transmission time from satellite to receiver; this, in turn, depends on knowing the time on both ends. NAVSTAR satellites use atomic clocks, which are very accurate but can drift up to a millisecond (enough to make an accuracy difference). These errors are minimized by calculating clock corrections (at monitoring stations) and transmitting the corrections along with the GPS signal to appropriately outfitted GPS receivers.
- Upper atmosphere (ionosphere): As GPS signals pass through the upper atmosphere (the ionosphere 50-1000km above the surface), signals are delayed and deflected. The ionosphere density varies; thus, signals are delayed more in some places than others. The delay also depends on how close the satellite is to being overhead (where distance that the signal travels through the ionosphere is least). By modeling ionosphere characteristics, GPS monitoring stations can calculate and transmit corrections to the satellites, which in turn pass these corrections along to receivers. Only about three-quarters of the bias can be removed, however, leaving the ionosphere as the second largest contributor to the GPS error budget.
- Receiver clock: GPS receivers are equipped with quartz crystal clocks that are less stable than the atomic clocks used in NAVSTAR satellites. Receiver clock error can be eliminated, however, by comparing times of arrival of signals from two satellites (whose transmission times are known exactly).
- Satellite orbit: GPS receivers calculate coordinates relative to the known locations of satellites in space, a complex task that involves knowing the shapes of satellite orbits as well as their velocities, neither of which is constant. The GPS Control Segment monitors satellite locations at all times, calculates orbit eccentricities, and compiles these deviations in documents called ephemerides. An ephemeris is compiled for each satellite and broadcast with the satellite signal. GPS receivers that are able to process ephemerides can compensate for some orbital errors.
- Lower atmosphere: The three lower layers of atmosphere (troposphere, tropopause, and stratosphere) extend from the Earth’s surface to an altitude of about 50 km. The lower atmosphere delays GPS signals, adding slightly to the calculated distances between satellites and receivers. Signals from satellites close to the horizon are delayed the most, since they pass through the most atmosphere.
- Multipath: Ideally, GPS signals travel from satellites through the atmosphere directly to GPS receivers. In reality, GPS receivers must discriminate between signals received directly from satellites and other signals that have been reflected from surrounding objects, such as buildings, trees, and even the ground. Antennas are designed to minimize interference from signals reflected from below, but signals reflected from above are more difficult to eliminate. One technique for minimizing multipath errors is to track only those satellites that are at least 15° above the horizon, a threshold called the «mask angle.»
Multipath errors are particularly common in urban or woody environments, especially those with large valleys or mountainous terrain, and are one of the primary reasons why GPS works poorly or not at all in large buildings, underground, or on narrow city streets that have tall buildings on both sides. If you have ever been geocaching, hiking, or exploring and noticed poor GPS service while in dense forests, you were experiencing multipath errors.
5.3.2 Dilution of Precision
The arrangement of satellites in the sky also affects the accuracy of GPS positioning. The ideal arrangement (of the minimum four satellites) is one satellite directly overhead, three others equally spaced nearer the horizon (but above the mask angle). Imagine a vast umbrella that encompasses most of the sky, where the satellites form the tip and the ends of the umbrella spines.
GPS coordinates calculated when satellites are clustered close together in the sky suffer from dilution of precision(DOP), a factor that multiplies the uncertainty associated with User Equivalent Range Errors (UERE — errors associated with satellite and receiver clocks, the atmosphere, satellite orbits, and the environmental conditions that lead to multipath errors). The calculation of DOP results in values that range from 1 (the best case, which does not magnify UERE) to more than 20 (in which case, there is so much error the data should not be used). According to Van Sickle (2001), the lowest DOP encountered in practice is about 2, which doubles the uncertainty associated with UERE.
GPS receivers report several components of DOP, including Horizontal Dilution of Precision (HDOP) and Vertical Dilution of Precision (VDOP). The combination of these two components of the three-dimensional position is called PDOP — position dilution of precision. A key element of GPS mission planning is to identify the time of day when PDOP is minimized. Since satellite orbits are known, PDOP can be predicted for a given time and location. Professional surveyors use a variety of software products to determine the best conditions for GPS work.

Global Navigation Satellite Systems (GNSS)
All errors are at the 95% probability level.
Ephemeris Errors
These are errors in the SVs calculation of position caused by the gravitational effects of the sun, moon, planets and solar radiation. The SV position is checked every 12 hours and, where necessary, updated. The maximum error will be 2.5 m.
SV Clock Error
As with SV ephemeris, the SV clock is checked at least every 12 hours and any error is passed to the SV to be included in the broadcast. Maximum error 1.5 m.
Ionospheric Propagation Error
The interaction of the radio energy with the ionized particles in the ionosphere causes the radio energy to be slowed down as it traverses the ionosphere, this is known as the ionospheric delay. The delay is dependent on both the level of ionization and the frequency of the radio waves. The higher the frequency is, the smaller the delay and the higher the levels of ionization, the greater the delay. The receiver contains an average model of the ionosphere which is used to make time corrections to the measured time interval. The state of the ionosphere is continuously checked at the monitoring stations and the required modifications to the model is regularly updated to the SVs and thence to the receivers. However, the propagation path from the SV to the monitoring station will be very different to that to the receiver, so this is only a partial solution.
The ionospheric delay is inversely proportional to the square of the frequencies.
As two different frequencies will experience different delays, by measuring the difference in arrival time of the two signals we can deduce the total delay experienced hence minimising the error and calculate a very accurate range.
This is the most significant of the errors in SV navigation systems.
Maximum error for single frequency operation is 5 m.
Tropospheric Propagation Error
Because of the inherent accuracy of SV navigation systems, the effect of variations in tropospheric conditions on the passage of radio waves has become significant. Variations in pressure, temperature, density and humidity affect the speed of propagation, increased density and increased absolute humidity reduce the speed of propagation. For example, a change in transit time of one nanosecond would give an error of 0.3 m. As with ionospheric propagation error this is minimized with the use of two frequencies.
Receiver Noise Error
All radio receivers generate internal noise, which in the case of GNS receivers can cause errors in measurement of the time difference. Maximum 0.3 m.
Multipath Reception
Reflections from the ground and parts of the aircraft result in multipath reception. This can be minimized by careful siting of the aerial and by internal processing techniques. Maximum 0.6 m.
18
Global Navigation Satellite Systems (GNSS) 18
317
18 Global Navigation Satellite Systems (GNSS)
Dilution of Precision (DOP)
The satellite geometry, (angle of cut between position lines), and any error in the pseudoranges (time synchronization) will degrade the accuracy of the calculated position.
Figure 18.18 PDOP
DOP is further divided:
(GNSS) Systems Satellite Navigation Global 18
Horizontal dilution of precision (HDOP). This refers to errors in the X and Y coordinates.
Vertical dilution of precision (VDOP). This refers to errors in the Z coordinate.
Position dilution of precision (PDOP). This is a combination of HDOP and VDOP.
Time dilution of precision (TDOP). This refers to timing errors.
Geometric dilution of precision (GDOP). This is a combination of PDOP and TDOP.
Errors caused by PDOP are minimized by the geometry of the positioning of the SVs in their orbits and by the receivers selecting the four best SVs to determine position. The SV geometry that will provide the most accurate fixing information is one SV directly overhead the receiver and the other three SVs close to the horizon and spaced 120° apart.
Effect of Aircraft Manoeuvre
Aircraft manoeuvre may result in part of the aircraft shadowing one or more of the in-use SVs. There are two possible outcomes of this. Firstly, whilst the SV is shadowed, the signal may be lost resulting in degradation of accuracy, or the receiver may lock onto reflections from other parts of the aircraft again with a reduction in accuracy. The effect of manoeuvre can be minimized by careful positioning of the aerial on the aircraft. The optimum position for the antenna is on top of the fuselage close to the aircraft’s centre of gravity.
Selective Availability (SA)
SA was introduced into GPS by the US DOD in about 1995. It deliberately degraded the accuracy of the fixing on the C/A code (i.e. for civilian users). The USA withdrew SA at 0000 on 01 May 2000, and President Clinton stated that it would never be reintroduced. (SA downgraded the accuracy of position derived from the C/A code to the order of 100 m spherical error). SA was achieved by introducing random errors in the SV clock time, known as dithering the SV clock time.
318

Global Navigation Satellite Systems (GNSS)
System Accuracy
The ICAO specification requires an accuracy (95%) of the SPS to be:
•Horizontal: ± 13 m
•Vertical: ± 22 m
|
• Time: |
40 nanoseconds (10-9) |
Integrity Monitoring
The ICAO specification for radio navigation systems requires a 2 second warning of failure for precision systems (e.g. ILS) and 8 second warning for non-precision systems. With 4 SVs being used to provide a 3D position, there is no means of detecting the degradation of information in any of the SV data and an operator could potentially experience errors of hundreds of miles unless he was able to cross-check the GNSS position with another system. Therefore differential systems are under development which will determine any degradation in accuracy and allow a timely warning of the failure or degradation of the information provided.
Differential GPS (DGPS)
If the SV information degrades, the GPS receiver has no means of determining the degradation. Consequentially the safety of flight may be seriously endangered. DGPS is a means of improving the accuracy of GPS by monitoring the integrity of the SV data and warning the user of any errors which occur. DGPS systems will provide warning of failure in the SV data and prevent or minimize the effect of such errors, or provide failure warning and improve the accuracy of the deduced position. There are three kinds of DGPS currently in use or under development:
•Air based augmentation systems (ABAS)
•Ground based augmentation systems (GBAS)
•Satellite based augmentation systems (SBAS)
Air Based Augmentation Systems (ABAS)
To determine, at the receiver, if any of the data from any of the SVs is in error requires the use of a fifth SV. By comparing positions generated by the combinations of the five SVs it is possible to detect errors in the data, and hence which SV is in error. The rogue SV can then be deselected. However, once the system is back to 4 SVs the facility is lost. The CAA recommend that a minimum of 6 SVs are available, so that if a SV is deselected the integrity monitoring continues to be available. The GPS term for this is “receiver autonomous integrity monitoring” (RAIM). RAIM has only limited availability at present and would require at least 30 operational SVs to achieve continuous global availability. RAIM will only provide failure warning and either prevent or minimize errors in computed position arising from erroneous SV data.
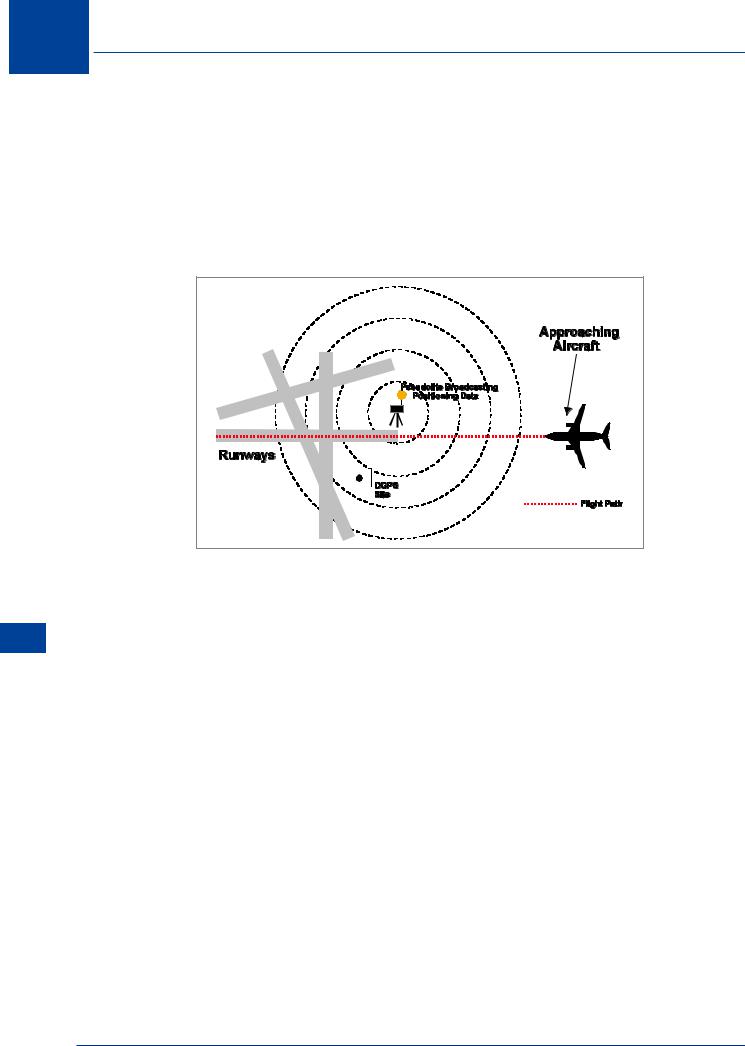
Ground Based Augmentation Systems (GBAS)
GBAS is a local area DGPS (LADGPS) implemented through a local area augmentation system (LAAS). This system is used in aviation to provide both failure warning and enhancement of the GPS receiver position by removing ephemeris and SV clock errors and minimizing ionospheric and tropospheric errors. It will not remove errors arising from receiver noise and multipath reception as these errors are particular to the receiver. It is specifically established to provide precision runway approaches.
18
Global Navigation Satellite Systems (GNSS) 18
319
18 Global Navigation Satellite Systems (GNSS)
The implementation of a LAAS requires a precisely surveyed site on the aerodrome and a means of transmitting the corrections to aircraft operating close to the aerodrome. On the site is a GPS receiver which determines the GPS position and compares it with the known position of the site. The error in the X, Y and Z coordinates is determined and specially formatted to be transmitted to approaching aircraft. The system will detect any errors in the SV data and either correct the error or give a failure warning indication.
The data is transmitted to aircraft via a dedicated VHF link. A pseudolite (pseudo-satellite) is also provided to give range to the runway threshold using GNSS techniques.
(GNSS) Systems Satellite Navigation Global 18
Figure 18.19 LAAS
When the aircraft is close to the DGPS site, the ionospheric and tropospheric transmission paths will be virtually identical so these errors are effectively eliminated. The LAAS has the potential to provide the necessary accuracy to achieve category IIIC type operations.
Satellite Based Augmentation Systems (SBAS)
SBAS utilize a wide area DGPS (WADGPS) implemented through a wide area augmentation system (WAAS). There are four systems currently operating, these are:
The European Geostationary Navigation Overlay System (EGNOS), declared operational in July 2004.
The USA WAAS, declared operational in July 2003.
The Japanese Multifunctional Transport Satellite Augmentation System, (MSAS). The Indian Geo and GPS Augmented Navigation (GAGAN).
The objectives of these systems are more or less identical, to provide an integrity monitoring and position enhancement to aircraft operating over a large area. The methods of implementation differ slightly between systems, but the end result to the user will be the same (i.e. there will be full compatibility between the systems). The discussion of WADGPS will centre on EGNOS, but the same principles apply to all SBAS.
320

Global Navigation Satellite Systems (GNSS)
There are 3 segments making up SBAS:
The space segment which comprises the GPS and GLONASS constellations and geo-stationary SVs.
Note: Geostationary SVs have an orbital period of 24 hours and are found only in equatorial orbits at an altitude of 35 800 km
The ground segment comprising reference stations (RS), regional control stations (RCS) and a master control station (MCS) (or navigation earth station (NES)).
The user segment comprised all who use the service.
RS are established within a region to measure the accuracy of the SV data and the ionospheric and tropospheric effects on the SV transmissions. As with LAAS the RS are precisely surveyed sites containing a GPS receiver and an accurate atomic clock. Each RS is linked to an RCS. The RCS will be linked in turn to MCS (or NES).
|
GEOSTATIONARY |
GPS |
|
|
GPS |
||
|
GPS |
Figure 18.20 EGNOS Segments
The RS determine their GPS position from the SV data. The RS now, since it knows its own position and receives the SV ephemeris, clock time and any clock error corrections, back calculates the true position and time at the SV and determines the range error for each SV. It also determines if there are significant errors which render any of the SVs’ information unusable, hence providing an integrity check on the system. This range error will not deviate significantly over a considerable range (400+ km), neither will the relative effects of the ionospheric and tropospheric propagation.
The data (SV errors and integrity assessment) is sent via the RCS to the MCS (located at the NATS at Gatwick) where it is formatted for use by suitable equipped GPS receivers. The data is then sent to Goonhilly Down to be uplinked for broadcast on the East Atlantic and Indian Ocean INMARSAT geostationary SVs navigation broadcast channels. The GPS receivers incorporate the data into the calculations and achieve both enhancement of position and failure warning.
Whilst the accuracy of GPS will be greatly enhanced by WADGPS, it cannot and is unlikely to achieve the accuracy required for category I type operations. These will continue for the foreseeable future to require the provision of LAAS. (The best decision height achieved to date is about 300 ft, and this is unlikely to be improved upon in the near future).
18
Global Navigation Satellite Systems (GNSS) 18
321