Содержание
- Required Navigation Performance (RNP)
- Updated:
- The big picture
- RNAV vs. RNP
- Equipment Requirements
- Monitoring Ground-based NAVAIDS
- Total System Error (TSE)
- Containment
- навигация / Аэронавигация в международных полетах
Required Navigation Performance (RNP)
So what is the difference between area navigation (RNAV) and required navigation performance (RNP)? Well that depends.
— James Albright
Updated:
RNAV airspace generally mandates a certain level of equipment and assumes you have a 95% chance of keeping to a stated level of navigation accuracy. RNP is a part of Performance Based Navigation (PBN) which adds to the same RNAV accuracy standards a level of system monitoring and alerting. But not always! It has made the various navigation rules easier to understand, but it hasn’t made them easily understood. It can be confusing . . .
The big picture
AC 90-100A Cover, from AC 90-100A
Area Navigation (RNAV). A method of navigation which permits aircraft operation on any desired flight path within the coverage of station-referenced navigation aids or within the limits of the capability of self-contained aids, or a combination of these. For the purposes of this AC, the specified RNAV accuracy must be met 95% of the flight time.
RNAV systems evolved in a manner similar to conventional ground-based routes and procedures. A specific RNAV system was identified and its performance was evaluated through a combination of analysis and flight testing. For domestic operations, the initial systems used very high frequency omnidirectional radio range (VOR) and distance measuring equipment (DME) for estimating their position; for oceanic operations, inertial navigation systems (INS) were employed. These «new» systems were developed, evaluated and certified. Airspace and obstacle clearance criteria were developed based on the performance of available equipment; and specifications for requirements were based on available capabilities. In some cases, it was necessary to identify the individual models of equipment that could be operated within the airspace concerned. Such prescriptive requirements resulted in delays to the introduction of new RNAV system capabilities and higher costs for maintaining appropriate certification.
In the old days we would navigate IFR from navaid to navaid and when we had to, we would fly fix-to-fix by mentally visualizing the airspace and estimating a course to fly. How? See: Fix-to-fix.
Then various boxes appeared that did this better than we could and «area navigation» was born. It is simply a method of navigation that allows us to fly along any desired flight path. Inertial navigation systems allowed us to do this beyond the range of navigation aids and GNSS / GPS give us access to the best navigation aid of all just about anywhere in the world.
ICAO Doc 9613 Cover, (ICAO Doc 9613
Performance-based navigation (PBN). The PBN concept specifies that aircraft RNAV system performance requirements be defined in terms of the accuracy, integrity, availability, continuity and functionality, which are needed for the proposed operations in the context of a particular airspace concept. The PBN concept represents a shift from sensor-based to performance-based navigation. Performance requirements are identified in navigation specifications, which also identify the choice of navigation sensors and equipment that may be used to meet the performance requirements. These navigation specifications are defined at a sufficient level of detail to facilitate global harmonization by providing specific implementation guidance for States and operators.
Under PBN, generic navigation requirements are defined based on operational requirements. Operators then evaluate options in respect of available technology and navigation services, which could allow the requirements to be met. An operator thereby has the opportunity to select a more cost-effective option, rather than a solution being imposed as part of the operational requirements. Technology can evolve over time without requiring the operation itself to be reviewed, as long as the expected performance is provided by the RNAV system. As part of the future work of ICAO, it is anticipated that other means for meeting the requirements of the navigation specifications will be evaluated and may be included in the applicable navigation specifications, as appropriate.
Performance based navigation incorporates RNAV and adds the ability to continuously monitor the accuracy and utility of the system, alerting the pilot when the system isn’t as good as it is supposed to be.
RNAV vs. RNP
Not to long ago the terms RNP and RNAV were used interchangeably. The Performance Based Navigation (PBN) concept changed all that. In concept, RNAV is a subset of RNP. In actual practice, there is an exception given for RNP-10, which is actually another form of RNAV. (More on that below.)
Equipment Requirements
RNAV routes typically specify minimum equipment levels needed to satisfy navigation accuracy. For example:
U.S. RNAV operations are based upon the use of RNAV equipment that automatically determines aircraft position in the horizontal plane using inputs from the following types of positioning sensors (no specific priority).
(1) Global Navigation Satellite System (GNSS) in accordance with TSO-C145a, TSO- C146a, and TSO-C129/C129a. Positioning data from other types of navigation sensors may be integrated with the GNSS data provided it does not cause position errors exceeding the total system error requirements. The use of GPS equipment approved to TSO-C129() is limited to those which include the minimum system functions specified in Appendix 3. As a minimum, integrity should be provided by ABAS. In addition, GPS stand-alone equipment should include the following additional functions:
- Pseudorange step detection
- Health word checking.
For procedures requiring GPS and/or aircraft approvals requiring GPS, if the navigation system does not automatically alert the flight crew of a loss of GPS, the operator must develop procedures to verify correct GPS operation.
(2) DME/DME RNAV equipment complying with the criteria in appendix 1. Based on current DME availability evaluations, coverage is not sufficient to support DME/DME RNAV operations without additional IRU augmentation or using GPS.
(3) DME/DME/IRU RNAV equipment complying with the criteria in appendix 2.
True RNP, that using Performance Based Navigation, does not specify equipment but may require more than just navigation capability:
PBN offers a number of advantages over the sensor-specific method of developing airspace and obstacle clearance criteria, i.e.:
- reduces the need to maintain sensor-specific routes and procedures, and their associated costs;
- avoids the need for developing sensor-specific operations with each new evolution of navigation systems, which would be cost-prohibitive;
- allows for more efficient use of airspace (route placement, fuel efficiency and noise abatement);
- clarifies how RNAV systems are used; and
- facilitates the operational approval process for operators by providing a limited set of navigation specifications intended for global use.
Within an airspace concept, PBN requirements will be affected by the communication, surveillance and ATM environments, the navaid infrastructure, and the functional and operational capabilities needed to meet the ATM application. PBN performance requirements also depend on what reversionary, non-RNAV means of navigation are available and what degree of redundancy is required to ensure adequate continuity of functions.
Monitoring Ground-based NAVAIDS
The pilot is not required to monitor ground-based NAVAIDs used in position updating unless specified by the Airplane Flight Manual (AFM).
Total System Error (TSE)
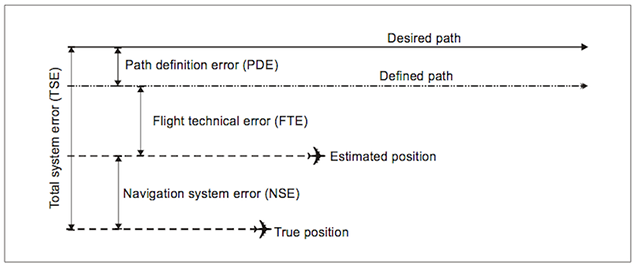
Lateral navigation errors, (ICAO Doc 9613, figure II-A-2-1)
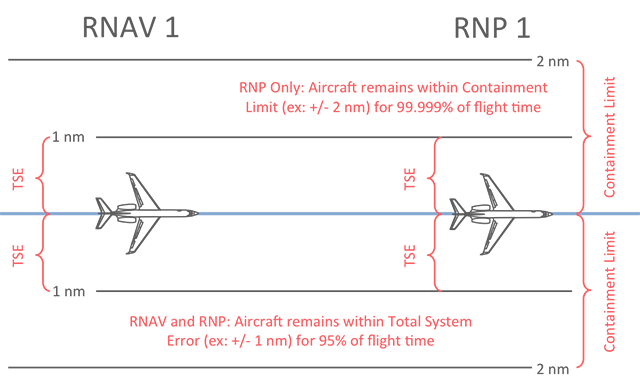
Total System Error (TSE) is simply a measure of how far off course the airplane can be. In RNP-1 or RNAV-1 airspace, for example, the TSE = 1. Is RNP more accurate than RNAV? No.
- RNAV systems conform to the ICAO performance-based navigation specification for total system error (TSE). RNAV total system error is the 95% probability that the navigation system accuracy remains within the limits defined for the RNAV operation. For example, during an RNAV-1 operation the TSE remains within one nautical mile of the desired path 95% of the time.
- RNP systems conform to a performance-based navigation specification based on RNAV capability that also includes requirements for on-board performance monitoring and alerting. For example, during an RNP 1.0 operation, the TSE remains within one nautical mile of the desired path 95% of the time, and on-board performance monitoring provides the pilot with an alert when the probability that TSE exceeds 2xRNP is greater than 10 -5 .
- RNP is an RNAV subset that also includes a requirement to provide on-board navigation system accuracy performance monitoring and alerting which means an RNP system is also an RNAV system. GNSS equipment provides accuracy performance monitoring and alerting which, by definition, makes it both an RNAV and RNP capable system.
Looking at the figure on the top of the page, you see that both RNAV-1 and RNP-1 keep the aircraft within 1 nautical mile of centerline 95% of the flight time. The difference is that under RNP-1, the pilot is notified when the system thinks there is a greater than 0.00001 probability (.001%) that the airplane could wander outside of 2 nautical miles.
- RNAV says you should be on course,
- RNP says you should be on course, monitors system performance, and alerts you when it thinks there is a problem.
Containment
So what makes RNP different than RNAV?
Let’s first look at what makes them the same:
- The system defines navigation accuracy as being able to stay within the total system error at least 95% of the total flight time. This applies to BOTH RNAV and RNP.
- In our example, with RNAV-1 or RNP-1, the airplane will be within 1 nautical mile 95% of the flight time.
The following applies ONLY to RNP:
- The system considers itself adequately contained as long as the probability of the airplane being inside an area twice the total system error value at least 99.999% of the time. The regulations seem to confuse the term «containment» as either the 95% navigation accuracy limit or the 99.999% alert limit.
- Regardless of the terminology, you should remember that twice the stated number is where the airplane will be 99.999% of the time before issuing an alert.
- In our example, with RNP-1, the airplane will alert the pilot if there is greater than a 0.001% chance the airplane could be more than 2 nautical miles off course.
The PBN concept uses the term on-board performance monitoring and alerting instead of the term containment. This is to avoid confusion between existing uses of containment in various documents by different areas of expertise. For example:
- «Containment» refers to the region within which the aircraft will remain 95 per cent of the time. The associated terms have been «containment value» and «containment distance» and the related airspace protection on either side of an RNAV ATS route.
- Within the industry standards of RTCA/DO-236 and EUROCAE/ED-75, «containment» refers to the region that the aircraft will remain when there is no alert (0.99999 probability), and defines a requirement for how often an alert occurs (0.9999). The associated terms are «containment limit», «containment integrity», «containment continuity», and «containment region».
- Within PANS-OPS material, «containment» has referred to the region used to define the obstacle clearance, and the aircraft is expected to remain within or above that surface (regardless of alerting) with very high probability. The associated terms have been «containment area», «airspace containment», «obstacle clearance containment» and related obstacle protection areas.
The previous ICAO expressions of «containment value» and «containment distance» have been replaced by the navigation accuracy of TSE.
Источник
навигация / Аэронавигация в международных полетах
– четырехмерная зональная навигация в горизонтальной и вертикальной плоскостях плюс решение задачи регулирования скорости полета для прохождения пунктов маршрута или прибытия на аэродром в заданное время. Зональная навигация по времени сокращенно обозначается TNAV (буква T — от слова Time ).
Проблема зональной навигации состоит не только в обеспечении полета по произвольной траектории, а и в том, чтобы точность ее выдерживания соответствовала требованиям данного региона. В современной аэронавигации эти требования устанавливаются в виде навигационных спецификаций.
Навигационная спецификация — совокупность требований к ВС и летному экипажу, необходимых для обеспечения полетов в условиях навигации, основанной на характеристиках, в пределах установленного воздушного пространства. Имеются два вида навигационных спецификаций:
– спецификация RNAV. Навигационная спецификация, основанная на зональной навигации, которая не включает требование к контролю за выдерживанием и выдаче предупреждений о несоблюдении характеристик, обозначаемая префиксом RNAV, например, RNAV
– спецификация RNP. Навигационная спецификация, основанная на зональной навигации, которая включает требование к контролю за выдерживанием и выдаче предупреждений.
При применении методов зональной навигации должны быть выполнены следующие обязательные условия:
– если оборудование RNAV, RNP использует сигналы наземных или спутниковых средств, то оно должно устойчиво принимать эти сигналы на всем протяжении полета по маршруту или маневрирования в районе аэродрома;
– оборудование RNAV, RNP должно быть сертифицировано для выполнения полета по маршруту и в районе аэродрома;
– летный экипаж должен иметь допуск к выполнению полетов по маршрутам RNAV и
в районе аэродрома;
– координаты WP должны определяться и публиковаться в АИП государств во Всемирной геодезической системе координат WGS-84 и с требуемой точностью, разрешением и целостностью.
В Российской Федерации используется геодезическая система координат Параметры Земли – 90, версия ПЗ-90.11. Данная система координат для целей навигации практически эквивалентна WGS-84.
4.1.2. Основные положения PBN
Одним из компонентов концепции воздушного пространства на основе PBN ( Performance Base Navigation — навигация, основанная на характеристиках) является навигация.
Навигация, основанная на характеристиках, — зональная навигация, основанная на требованиях к характеристикам ВС, выполняющих полет по маршруту ОВД, схему захода на посадку по приборам или полет в установленном воздушном пространстве.
Требования к характеристикам определяются в навигационных спецификациях в виде точности, целостности, непрерывности, готовности и функциональных возможностей, необхо-

димых для выполнения планируемого полета в контексте концепции конкретного воздушного пространства.
Точность выдерживания навигационных характеристик — общая погрешность системы (Total System Error, TSE), допускаемая в боковом и продольном измерениях. TSE в каждом измерении не должна превышать норм для установленного типа RNP в течение 95 % полетного времени на любом участке одного полета.
Целостность (Integrity) — способность системы своевременно выдавать пользователям предупреждения в тех случаях, когда система не должна использоваться для навигации.
Непрерывность обслуживания (Continuity of function) –– способность всей системы функционировать без непредсказуемых прерываний во время выполнения намеченного полета.
Готовность (Availability) — показатель способности системы обеспечивать надлежащее обслуживание в пределах установленной зоны действия. Определяется в виде интервала времени, в течение которого система должна использоваться для навигации.
Навигация, основанная на характеристиках, состоит из трех взаимосвязанных элементов: навигационное применение, навигационные характеристики (возможность оборудования ВС) и инфраструктура навигационных средств (рабочие области наземных и спутниковых систем навигации), рис. 4.1.
PBN объединяет в одно целое ряд различных видов применения RNAV и RNP, охватывающих все этапы полета: вылет, полет по маршруту и заход на посадку. PBN образует структурную основу требований к выдаче разрешений на выполнение полетов с использованием современных средств навигации ВС. Помимо повышения безопасности полетов PBN обеспечивает возможность получения существенных преимуществ в части, касающейся экономии топлива, до-ступности и гибкости в районах аэродромов и решения экологических проблем (эмиссия и шум).
Основное отличие бортового оборудования RNP от RNAV заключается в том, что оборудование RNP имеет функции мониторинга характеристик по точности и предупреждению, а некоторые модели оборудования RNAV этих функций могут и не иметь (рис. 4.2).
Концепция воздушного пространства
Компоненты концепции PBN
Рис. 4.1. Компоненты концепции навигации, основанной на характеристиках

Навигационные спецификации RNAV
RNP включают требования на борту ВС по
не включают требования к контролю
получаемой информации и
на борту за выдерживанием
характеристик и выдаче
Значение RNAV X
Рис. 4.2. Отличие навигационных характеристик RNAV и RNP
Мониторинг навигации по точности и выдача предупреждений являются главными элементами в оборудовании RNP и позволяют навигационной системе соблюдать необходимый уровень безопасности по точности наведения в боковом, продольном и вертикальном направлениях. Такой мониторинг дает пилоту возможность обнаружить, что навигационная система не достигает или не гарантирует требуемых навигационных характеристик на уровне целостности для производства полета.
Наличие в системе RNP усовершенствованной функции контроля целостности операции позволяет использовать более короткий интервал эшелонирования в продольном и боковом направлениях с обеспечением достаточной целостности, благодаря чему только системы зональной навигации осуществляют надежную и точную навигацию в определенном воздушном пространстве.
Использование системы RNP дает возможность существенно повышать безопасность полетов, быть всегда готовой к использованию и приносить прибыль за счет повышения плотности воздушного движения и оптимизации траекторий полета.
Применение концепции PBN в аэродромной зоне позволяет существенно уменьшить объем воздушного пространства для целей маневрирования при заходе на посадку и вылета за счет уменьшения зоны учета препятствий (рис. 4.3).
Рис. 4.3. Область учета препятствий на конечном этапе захода на посадку
и этапе прерванного захода с использованием: а — VOR; б — RNP APCH; в — RNP APCH с LPV .
APCH (Approach) — заход на посадку; APCH с LPV (Approach with Localizer performance with vertical guidance) — заход на посадку с точностью курсового радиомаяка и с вертикальным наведением

4.2. Спецификации, применяемые в концепции PBN
В соответствии с концепцией PBN применяются навигационные спецификации, представленные на рис. 4.4.
Важную роль в навигационной спецификации играет точность выполнения полета в горизонтальной плоскости (боковая навигация).
Неспособность обеспечить требуемую точность боковой навигации может объясняться навигационными погрешностями, относящимися к выдерживанию линии пути, техникой пилотирования и определению местоположения ВС.
Общая погрешность определения места ВС в боковом направлении (Total System Error, TSE) определяется тремя основными погрешностями в контексте контроля на борту за выдерживанием характеристик и выдачи предупреждений о погрешностях: определения траек-
тории (Path Definition Error, PDE), техники пилотирования (Flight Technical Error, FTE) и
навигационной системы (Navigation System Error, NSE). Предполагается, что распределение этих погрешностей будет независимым, нулевым средним и нормальным и в конечном итоге определяет общую погрешность системы. Подробней об этом см. разд. 4.3.
Поскольку все составляющие TSE являются случайными, невозможно требовать стопроцентного выдерживания заданной ширины коридора. Поэтому суть предъявляемых требований к конкретному типу спецификации к точности навигации заключается в том, что в течение 95 % полетного времени на любом участке полета TSE не должна превышать вели-
чину удерживания в каждом измерении (и по боковой, и по продольной координатам). Иначе говоря, численное значение типа спецификации обозначает допустимую TSE, выраженную для горизонтальной навигации (LNAV) в морских милях.
Например, для RNP 4 линейное боковое уклонение от ЛЗП, а также погрешность отображения оставшегося расстояния до точки пути не должны превышать 4 м. мили (7,4 км) в течение не менее 95 % времени полета. Здесь число 4 является величиной удерживания и обозначает тип RNP.
применения в океа-
применения в океа-
нических и удален-
полетах по марш-
Рис. 4.4. Навигационные спецификации в концепции PBN
Значение «95 % времени», соответствующее вероятности нахождения ВС в пределах коридора, равной 0,95, выбрано потому, что для многих видов законов распределения случайных погрешностей (в частности, для нормального закона и закона Лапласа) это значение вероятности соответствует удвоенной средней квадратической погрешности (2σ).
В зависимости от района и этапа полета применяемые типы навигационных характеристик даны в табл. 4.1.
4.3. Составляющие погрешности определения траектории полета
Как известно, точность навигации характеризуется величиной погрешности выдерживания заданной траектории, которая называется общей погрешностью системы (TSE). Погрешности рассматриваются отдельно по боковой и продольной координатам.
Погрешность по боковой координате , то есть в направлении, перпендикулярном ЛЗП, TSE представляет собой расстояние между фактическим местоположением ВС и ЛЗП в навигационной системе. Она включает в себя следующие составляющие: погрешность за-
данной траектории (PDE), погрешность техники пилотирования (FTE), погрешность навигационной системы (NSE), см. рис. 4.5.
Таблица 4.1 Применяемые типы навигационных характеристик, м. миля
Районы и этап полета
Участок захода на посадку
1 Маршрутная навигационная спецификация RNAV 5 может быть использована для начальной части захода на посадку за пределами 30 м. миль и выше MSA.
2 Спецификация RNP 1 ограничена в использовании STARs, SIDs, начальных и промежуточных участков захода на посадку и ухода на второй круг после начальной фазы набора. Применяется на удалении 56 км (30 м. миль) от контрольной точки аэродрома с целью предупреждения превышения погрешности определения места ВС более 3,7 км (2 м. миль).
3 A-RNP также допускает диапазон масштабируемых RNP в боковой навигационной точности.
4 По желанию требует более высокой целостности.
5 Есть два раздела в спецификации RNP APCH: GNSS и баро-VNAV, и SBAS.
6 Спецификация RNP 0.3 в первую очередь предназначена для полетов вертолетов.

Общая погрешность системы (TSE)
Ошибка определения МВС навигационной системой
Линия пути вычисленная бортовым компьютером
Рис. 4.5. Составляющие погрешности определения места ВС по боковой координате
Погрешность заданной траектории (PDE). Возникает из-за неточного определения или округления координат точек пути и при отображении на индикаторах информации, необходимой для наведения: отклонения планки прибора типа ПНП, местоположения ВС на синтезированной карте дисплея и т. п.
Погрешность пилотирования (FTE). Это расстояние между местоположением ВС, которое пилот видит на индикаторе, и заданным местоположением (ЛЗП) на этом же индикаторе. Это единственная составляющая TSE, которую экипаж может непосредственно наблюдать.
Погрешность навигационной системы (NSE). Она характеризует точность датчиков, используемых для определения координат, и включает в себя погрешности наземного и бортового оборудования, а также внешние погрешности, возникающие, например, при распространении радиоволн в пространстве.
С практической точки зрения важно знать допускаемую погрешность пилотирования (FTE). FTE характеризует не мастерство отдельного пилота или отклонение от принятой «техники пилотирования», а просто те возможности, которые обеспечивает данный способ управления ВС, то есть пилотирования.
FTE характеризует отклонения индицируемого местоположения ВС, возникающие при различных способах управления самолетом: ручном (штурвальном), директорном или автоматическом, от также отображаемой на приборах заданной траектории полета.
Значение погрешности пилотирования учитывается при построении зоны учета препятствий процедуры захода на посадку и вылета. К примеру, для схемы RNAV1 FTE принимается 0,5 м. миль (0,93 км), а для схемы RNP APCH — 0,25 м. миль (0,46 км).
Погрешность по продольной координате (вдоль ЛЗП) TSE представляет собой раз-
ность между отображенным на индикаторе расстоянием ВС до точки пути и фактическим расстоянием до этой точки. Она включает в себя почти те же составляющие, что и по боко-
вой координате — погрешности навигационной системы, вычисления данных и индикации .
Отсутствует лишь погрешность пилотирования. Поскольку нет заданного местоположения по продольной координате в данный момент времени, то нельзя определить отклонение от него. Но, конечно, ситуация изменится с введением TNAV.

Вычисленная траектория (Defined Path)
Рис. 4.6. Погрешность определения места ВС в продольном направлении
Возможность контроля характеристик на борту ВС и выдача предупреждения готовности является необходимостью в пределах конкретного воздушного пространства и позволяет пилоту выявить, действительно ли система RNP удовлетворяет требуемым навигационным характеристикам в боковом и продольном измерениях.
Возможность контроля характеристик и выдача предупреждения касается характеристик систем зональной навигации:
– «на борту» означает, что контроль характеристик и выдача предупреждения произведены на борту ВС, а не в другом месте, например, при сопровождении наземным радиолокатором, используемым для контроля или управления воздушным движением. Элемент контроля характеристик на борту ВС и выдача предупреждения имеют отношение к погрешности пилотирования и ошибке навигационной системы. Ошибка определения линии заданного пути обусловливается через целостность базы данных и функциональных требований на определение заданной траектории и считается незначительной;
– «контроль» касается контроля характеристик ВС, связанных со способностью определения ошибки местоположения и/или следования по заданной траектории;
– «выдача предупреждения» связана с контролем: если навигационная система ВС не выполняет достаточно хорошо свои функции, то об этом будет выдано предупреждение экипажу ВС.
Для контроля характеристик и выдачи предупреждения бортовая навигационная система должна удовлетворять следующим требованиям:
1) иметь контроль погрешности навигационной системы (NSE) и способность выдачи предупреждения с использованием алгоритма автономного контроля целостности приемника
(Receiver Autonomous Integrity Monitoring, RAIM) или возможность выявления и исключения неисправности (Fault Detection and Exclusion, FDE);
2) иметь навигационный индикатор с указанием бокового отклонения (например, ПНП), позволяющий пилотам контролировать погрешность пилотирования (FTE);
3) или иметь контроль характеристик и выдавать предупреждение общей погрешности си-
Общая погрешность системы (TSE) может значительно измениться со временем по ряду причин. Однако характеристики оборудования RNP гарантируют, что распределение TSE остается на требуемом уровне при выполнении полета.
4.4. Бортовое оборудование зональной навигации
Оборудование зональной навигации разработано для того, чтобы обеспечить данный уровень точности определения заданной траектории в соответствии заявленными требовани-
ями. Система зональной навигации обычно объединяет информацию от различных датчиков: это датчики высотно-скоростных параметров, инерциальная система, датчики радиотехнических средств навигации (VOR, DME, GNSS). Обязательным компонентом системы зональной навигации является наличие бортовой навигационной базы данных и пульта управления системой. Система зональной навигации обеспечивает выполнение следующих функций:
– управление планом полета;
– наведение по линии пути и контроль над наведением;
– индикация и контроль работоспособности системы.
Функция навигации позволяет определить положение ВС, скорость, фактический путевой угол, угол вертикальной траектории, угол сноса, магнитное склонение, барометрическую высоту, направление и скорость ветра, а также выполнить автоматическую и ручную настройку на радионавигационные средства с целью коррекции счисленных координат.
Система зональной навигации позволяет оценить работоспособность и качество данных, выдаваемых датчиками, которые позволяют определить фактическую траекторию полета. Прежде чем использовать, например, информацию от GNSS для целей коррекции счисленных координат, ее (информацию) подвергают оценке целостности и точности получения информации о местоположении ВС.
Наличие автоматической системы наведения в горизонтальной и вертикальной плоскостях позволяет пилоту оценить положение фактической траектории относительно заданной траектории на экране дисплея с электронной картой.
Отличие оборудования RNAV от RNP
Система RNP является системой зональной навигации, имеющей функциональные дополнительные возможности по осуществлению контроля характеристик и выдаче предупреждения. Текущее определение требований:
– надежно выполнять полет по заданной траектории с предсказуемостью, включая криволинейные траектории с постоянным радиусом в поле ветра;
– возможность осуществлять вертикальное наведение с предупреждением ограничений по высоте.
Контроль характеристик и возможность предупреждения осуществляются тогда, когда заданные требования RNP не соответствуют фактическим. Контроль индикации бокового отклонения траектории от заданной и выдача предупреждения являются взаимосвязанными функциями и определяют сущность навигационной целостности.
Система RNP позволяет отключить датчик навигационной информации тогда, когда его показания противоречат установленным значениям RNP или когда погрешность пилотирования в ручном режиме велика и пилоту не разрешается пилотирование вручную.
В качестве источников информации о местоположении могут использоваться VOR, DME, разностно-дальномерная система LORAN-C (РСДН-10), инерциальная навигационная система, GNSS.
RNP рассматриваются ИКАО как основной вид навигации, поскольку они обладают целым рядом неоспоримых преимуществ перед традиционной навигацией.

4.5. Требования к воздушному пространству
Внедрение зональной навигации с конкретным типом RNP в определенном воздушном пространстве зависит от инфраструктуры навигационных средств, технических требований к ВС и существенно влияет на организацию самого воздушного пространства.
Внедрение зональной навигации позволяет:
– повысить безопасность полетов за счет повышения точности навигации и сокращения числа случаев столкновения ВС с землей в управляемом полете путем обеспечения бокового и вертикального наведения на ВПП: замена заходов на посадку по традиционным системам наведения (ILS, VOR/DME, NDB) заходами на посадку на основе требуемых навигационных характеристик;
увеличить пропускную способность воздушного пространства за счет увеличения количества маршрутов ОВД с целью сокращения перегрузок; обеспечить пропускную способность для прогнозируемого роста воздушного движения: внедрение параллельных маршрутов ОВД RNP 2 между городами;
повысить эффективность полетов за счет сокращения задержек, создаваемых в результате чрезмерного «выравнивания» профилей полетов: внедрение маршрутов STAR RNAV 1, SID RNAV 1, позволяющих выполнять постоянное снижение при заходе на посадку, набор высоты до выхода на маршрут полета;
улучшить защиту окружающей среды — сократить уровни шума над чувствительными районами: заходы на посадку RNP AR APCH с наведением по криволинейной траектории полета и при выполнении процедуры прерванного захода на посадку;
улучшить доступ к аэропортам и в воздушное пространство при всех метеорологических условиях: заходы на посадку на основе RNP, позволяющие применять более низкие минимумы.
Типы RNP для определенных районов, объемов воздушного пространства в определенном диапазоне высот, для маршрутов или процедур в районе аэродрома устанавливаются либо соответствующим государством, либо региональным аэронавигационным соглашением. Конкретный тип RNP вводится в зависимости от ряда факторов: инфраструктуры средств связи, наличия наземных радиомаяков и радиолокационного наблюдения, насыщенности воздушного пространства, характера местности, расположения препятствий, особых зон и др.
На рис. 4.7 представлен вариант структурирования воздушного пространства по типам навигационных спецификаций.
Полет над океаном
или местностью без
Рис. 4.7. Применение навигационных спецификаций RNAV и RNP на маршрутах ОВД и в схемах полета по приборам
Заход на посадку
На различных этапах полета могут применяться различные типы навигационных спецификаций. Как правило, для захода на посадку и ухода на второй круг используются «строгие» типы спецификаций, для вылета и прибытия — более «мягкие», а на маршруте — совсем «мягкие» с минимальным набором функциональных требований.
В АИП государств описываются характеристики и требования к воздушному пространству при применении навигационных спецификаций на маршрутах или в определенных районах и публикуются фиксированные, резервные маршруты и районы применения конкретных спецификаций.
4.6. Требования к воздушным судам и членам летного экипажа
Воздушные суда, сертифицированные по менее строгим типам навигационных спецификаций, не допускаются к полетам в воздушное пространство с более строгими типами навигационных спецификаций.
Воздушные суда, сертифицированные по более строгим типам навигационных спецификаций, могут без ограничений летать в воздушном пространстве с менее строгими типами RNP, за исключением случаев, когда тип используемой навигационной системы не соответствует требованиям выполнения полета в данном районе. Например, сертифицированное по RNP 1 оборудование RNAV, работающее в режиме, не может использоваться для полета в Северной Атлантике с RNP10, поскольку в океане такие маяки отсутствуют.
Кроме самого значения типа навигационной спецификации, как правило, оговаривается конкретный тип оборудования или датчиков, которые должны применяться в обеспечении этого типа спецификации.
Воздушное судно должно быть оборудовано сертифицированной системой RNAV или
Как уже упоминалось, к простейшим системам RNAV относятся вычислительные системы, использующие сигналы маяков VOR/DME или двух DME, преобразующие полярные координаты в географические и решающие простые навигационные задачи. Основной их недостаток — ограниченная зона действия и невысокая точность, связанная с возможностями маяков VOR.
К системам, использующим внешние навигационные средства, относятся бортовые приемники GNSS. Их основное преимущество — глобальная зона действия и высокая точность. Недостаток — слабая помехозащищенность и связанная с этим недостаточная непрерывность обслуживания. Иными словами, высокая вероятность потери сигналов спутников в связи с промышленными или искусственными помехами.
К автономным системам RNAV относятся инерциальные системы (ИНС), которые определяют крен, тангаж, истинный курс, географическое место (включая геометрическую высоту) и вектор скорости ВС.
Основное преимущество ИНС — полная автономность. Основные недостатки — дороговизна и сложность, требующие корректной эксплуатации, а также уже отмечавшееся снижение точности работы с течением времени и, как следствие, необходимость коррекции счисленных координат.
К комплексным (мультисенсорным) системам RNAV, RNP относятся FMS (Flight Management System — система управления полетом). FMS — обобщенное название бортовых систем управления полетом, включающих в себя бортовые датчики, приемники, вычис-
Источник
Концепция требуемых навигационных характеристик (RNP) является подходом к установлению требований к точности и надежности аэронавигации в том или ином регионе. Идея, лежащая в основе этого подхода, впервые была реализована в регионе Северной Атлантики при введении там минимальных навигационных требований (МНТ) или, что то же самое, MNPS (Minimum Navigation Performance Specifications). В связи с введением в этом регионе сокращенных норм бокового эшелонирования были установлены требования к точности навигации всех ВС, выполняющих попеты в воздушном пространстве MNPS. Эти требования устанавливались в виде средней квадратической погрешности определения места ВС, а также в виде той доли общего времени полета, в течение которой боковое уклонение ВС находилось в требуемых пределах. Например, одно из требований заключалось в том, чтобы за пределами полосы ±30 м. миль ВС находилось не дольше, чем 1 час на 2000 часов полета (точное значение 5,3-10- 4). При этом не требовалось обязательно устанавливать навигационные системы определенного вида — ИНС, приемники РНС «OMEGA» или СНС, хотя именно они и использовапись для полетов в этом регионе. Главное — обеспечить требования к траектории полета, а каким именно путем — дело эксплуатанта (авиакомпании).
Такой подход, когда требования предъявляются не в форме необходимости установки на борту конкретного вида оборудования, а в виде допустимых пределов отклонений и соответствующих им вероятностей, оказался достаточно продуктивным. Он удобен всем участникам авиационного процесса. Органам ОВД — потому, что они теперь уверены: в их зоне ответственности выполняют полеты только ВС с характеристиками не хуже требуемых. Производителям навигационного оборудования — потому, что для них теперь задана требуемая точность выпускаемых навигационных систем. И авиакомпаниям, летным экипажам определены необходимые ориентиры: какие устанавливать бортовые системы, каков должен быть уровень подготовки экипажей, какие должны быть разработаны навигационные процедуры.
Дальнейшее развитие этот подход и получил в концепции RNP, которая была разработана в 1987 г. комиссией ИКАО по будущим навигационным системам (FANSC) и затем развивалась Группой экспертов по рассмотрению общей концепции эшелонирования.
RNP, установленные в том или ином районе (области воздушного пространства), характеризуются своим типом (RNP type), который и определяет требуемую точность аэронавигации в этом районе.
Как известно, точность навигации характеризуется величиной погрешности выдерживания заданной траектории, которая в [1] называется общей погрешностью системы (TSE — Total System Error). Погрешности рассматриваются отдельно по боковой и продольной координатам.
По боковой координате, то есть в направлении, перпендикулярном ЛЗП, TSE представляет собой расстояние между фактическим местоположением ВС и линией заданного пути в навигационной системе. Она включает в себя следующие составляющие:
1. Погрешность навигационной системы. Она характеризует точность датчиков, используемых для определения координат, и включает в себя, в свою очередь, погрешности наземного и бортового оборудования, а также внешние погрешности, возникающие, например, при распространении радиоволн в пространстве.
2. Погрешность вычисления данных RNAV. Возникает при преобразовании информации от датчиков в информацию об отклонении от заданной траектории. Например, пеленга и дальности — в линейное боковое уклонение.
3. Погрешность системы индикации. Возникает при отображении на индикаторах информации, необходимой для наведения: отклонения планки прибора типа
ПНП, местоположения ВС на синтезированной карте дисплея и т. п. Сюда же включаются погрешности задания траектории, возникающие, например, из-за неточного определения или округления координат точек пути.
4. Погрешность пилотирования (FTE, Flight Technical Error). Это расстояние между местоположением ВС, которое пилот видит на индикаторе, и заданным местоположением (ЛЗП) на этом же индикаторе. Это единственная составляющая TSE, которую экипаж может непосредственно наблюдать.
По продольной координате (вдоль ЛЗП) TSE представляет собой разность между отображенным на индикаторе расстоянием ВС до точки-пути и фактическим расстоянием до этой точки. Она включает в себя почти те же составляющие, что и по боковой координате, — погрешности навигационной системы, вычисления данных и индикации. Отсутствует лишь погрешность пилотирования. Ведь поскольку нет заданного местоположения по продольной координате в данный момент времени, то нельзя и определить отклонение от него. Но, конечно, ситуация изменится с введением TNAV;
Тип RNP обозначается числом, которое представляет собой выраженную в морских милях так называемую величину удерживания (containment value), определяющую допустимые отклонения. Понятно, что поскольку все составляющие TSE являются случайными, невозможно требовать стопроцентного выдерживания коридора шириной плюс-минус величину удерживания. Поэтому сущность предъявляемых конкретным типом RNP требований к точности навигации заключается в том, что в течение 95% полетного времени на любом участке одного попета TSE не должна превышать величину удерживания в каждом измерении (и по боковой, и по продольной координатам). Иначе говоря, численное значение типа RNP обозначает допустимую TSE, выраженную для горизонтальной навигации (LNAV) в морских милях.
Например, для RNP 4 линейное боковое уклонение от ЛЗП, а также погрешность отображения оставшегося расстояния до точки пути не должны превышать 4 м. мили в течение не менее 95% времени полета. Здесь число 4 является величиной удерживания и обозначает тип RNP.
Значение «95% времени», соответствующее вероятности нахождения ВС в пределах коридора, равной 0,95, выбрано потому, что для многих видов законов распределения случайных погрешностей (в частности, для нормального закона и закона Лапласа) это значение вероятности примерно соответствует удвоенной средней квадратической погрешности («сигме»). Это означает, что, например, для RNP 4 средняя квадратическая погрешность выдерживания ЛЗП должна составлять 2 м. мили. Если бы было выбрано другое значение вероятности, пришлось бы оговаривать еще и вид распределения.
Необходимо отметить, что ранее, в первом издании Руководства [1], величина удерживания рассматривалась как допустимая радиальная погрешность — расстояние между фактическим и заданным местоположением ВС. Но это оказалось неудобным пр/ оценке точности навигации в отдельности по каждой координате, тем более, что и составляющие погрешности по разным координатам несколько различаются. К тому же, «заданного местоположения» вовсе не существует, если не задана пространственно-временная траектория полета.
«Руководство по требуемым навигационным характеристикам RNP», разработанное ИКАО, пока еще, в данном издании, не формулирует требований к точности по высоте и времени, не устанавливает для них классификацию типов RNP. Но, как будет показано ниже, такие требования уже устанавливаются другими международными организациями.
С практической точки зрения важно знать допускаемую погрешность пилотирования (FTE). Иногда в литературе, пользуясь дословным, но не точным! переводом с английского, ее называют погрешностью техники пилотирования Это может вызвать неправильные ассоциации, поскольку техникой пилотирования обычно называют совокупность приемов управления самолетом, искусство пилота. В данном же случае FTE характеризует не мастерство отдельного пилота или отклонение от принятой «техники пилотирования», а просто те возможности, которые обеспечивает данный способ управления ВС, то есть пилотирования.
Как уже отмечалось, FTE характеризует отклонения индицируемого местоположения ВС, возникающие при различных способах управления самолетом — ручном (штурвальном), директорном или автоматическом, — от также отображаемой на приборах заданной траектории полета.
В документе [1] приводится таблица предполагаемых значений FTE для LNAV, которые используются при анализе составляющих TSE (табл. 1.1).
Предполагаемые значения FTE (при вероятности 95%)
Таблица 1.1
|
Этап полета |
Режим управления: |
|||||
|
ручной |
директорный |
автоматический |
||||
|
м. мили |
км |
м. мили |
км |
м. мили |
км |
|
|
Океанические маршруты (треки) |
2.0 |
3.7 |
0.5 |
0.93 |
0.25 |
0.463 |
|
Континентальные маршруты |
1.0 |
1.85 |
0.5 |
0.93 |
0.25 |
0.463 |
|
TМA (вылет и прибытие) |
1.0 |
1.85 |
0.5 |
0.93 |
0.25 |
0.463 |
|
Заход на посадку |
0.5 |
0.93 |
0.25 |
0.463 |
0.125 |
0.231 |
Авиация является очень обширной областью, в которой имеется большое количество терминов, определений, сокращений и аббревиатур.
Очень важно не запутаться в этих данных, для этого нужно их знать наизусть или, хотя бы, иметь под рукой соответствующую шпаргалку, в которую при необходимости можно быстро заглянуть и найти нужную информацию.
На данной странице приведен основной (сокращенный) перечень авиационных аббревиатур на английском языке с их расшифровкой и переводом на русский язык.
Чтобы быстрее найти нужное авиационное сокращение, можете использовать таблицу с алфавитом — кликните на нужную букву:
Definition
Required Navigation Performance (RNP) is a family of navigation specifications under Performance Based Navigation (PBN) which permit the operation of aircraft along a precise flight path with a high level of accuracy and the ability to determine aircraft position with both accuracy and integrity. RNP offers safety benefits by means of its precision and accuracy and it reduces the cost of operational inefficiencies such as multiple step-down non-precision and circling approaches.
RNP vs RNAV
Under the PBN concept, in addition to the RNP navigation specifications there exists the area navigation (RNA) family of navigation specifications. RNAV and RNP navigation specifications are substantially very similar; they only differ in relation to the performance monitoring and alerting requirement which applies to RNP navigation specifications. This means that if the RNP system does not perform the way it should then an alert should be provided to the flight crew. In practical terms what this means is that air traffic control (ATC) can have greater confidence in the track keeping performance of the aircraft and this greater confidence translates into being able to place routes closer together.
Level of performance and requirements
RNP refers to the level of performance required for a specific procedure or a specific airspace block. An RNP of 0.3 means the aircraft navigation system must be able to calculate its position to within a circle with a radius of 3 tenths of a NM. The aircraft is required to have both aircraft and operational approval for RNP and the operator must know the level of monitoring provided. FMS equipment with GPS multi-sensor capability meeting TSO-C146 (SBAS/WAAS GPS) meets basic RNP requirements, when installed in an RNP-compliant aircraft installation. The FMS is a key component of an RNP compliant installation. The aircraft operator has to ensure that the aircraft meets the requirements for the specific approval being sought. An operational approval issued by one certification agency will typically be accepted by all, but the operator should ensure that the aircraft meets the requirements for the specific approval being sought or risk denial of access or violation.
RNP specifications
The International Civil Aviation Organization’s (ICAO) PBN Manual identifies seven navigation specifications under the RNP family: RNP4, RNP2, RNP1, Advanced RNP, RNP APCH, RNP AR APCH and RNP 0.3.
RNP 4 is for oceanic and remote continental navigation applications. RNP 2 is for en-route oceanic remote and en-route continental navigation applications. RNP 1 is for arrival and initial, intermediate and missed approach as well as departure navigation applications. Advanced RNP is for navigation in all phases of flight. RNP APCH and RNP AR (authorisation required) APCH are for navigation applications during the approach phase of flight. RNP 0.3 is for the en-route continental, the arrival, the departure and the approach (excluding final approach) phases of flight and is specific to helicopter operations.
On-board performance monitoring and alerting
The on-board performance monitoring and alerting requirements for RNP 4, RNP 2, Advanced RNP, RNP 1 RNP APCH and RNP 0.3 have common terminology and application. Each of these RNP specifications includes requirements for the following characteristics:
- Accuracy: the accuracy requirement defines the 95% total system error (TSE) for those dimensions where an accuracy requirement is specified. The accuracy requirement is harmonised with the RNAV specifications and is always equal to the accuracy value. A unique aspect of the RNP specifications is that the accuracy is one of the performance characteristics that is monitored.
- On-board performance monitoring: the aircraft, or aircraft and pilot in combination, is required to monitor the TSE, and to provide an alert if the accuracy requirement is not met or if the probability that the TSE exceeds two-times the accuracy value is larger than 10⁻⁵. To the extent operational procedures are used to satisfy this requirement, the crew procedure, equipment characteristics, and installation are evaluated for their effectiveness and equivalence.
- Aircraft failures: failure of the aircraft equipment is considered within airworthiness regulations. Failures are categorised by the severity of the aircraft level effect, and the system must be designed to reduce the likelihood of the failure or mitigate its effect. Both malfunction (equipment operating but not providing appropriate output) and loss of function (equipment ceases to function) are addressed. Dual system requirements are determined based on operational continuity (e.g. oceanic and remote operations). The requirements on aircraft failure characteristics are not unique to RNP specifications.
- Signal-in-space failures: Signal-in-space characteristics of navigation signals are the responsibility of the ANSPs.
Related Articles
- Performance Based Navigation (PBN)
- Area Navigation (R-NAV)
- Global Navigation Satellite System (GNSS)
Further Reading
- Air Pilots Safety Briefing Note 08: «Understanding RNP Approaches»
- European GNSS Contingency/Reversion Handbook for PBN Operations: Scenarios and Options. PBN Handbook No.6, EUROCONTROL, Feb 2019
- Introducing Performance Based Navigation (PBN) and Advanced RNP (A-RNP), EUROCONTROL, January 2013.
- Performance-based Navigation Manual (advance 4th ed.), ICAO, 2012.
- Understanding Required Navigation Performance (RNP) and Area Navigation (RNAV) Operations, Universal Avionics Systems Corporation, October 2013.