Содержание
- ШИМ, PWM контроллер. Усилитель ошибки. Частота. Инвертирующий, неинвертирующий входы. Синхронизация. Обратная связь. Применение
- 1.7 Неисправности узч
- TL494, что это за «зверь» такой?
- Состав.
- Рекомендуемые рабочие параметры.
- Расположение и назначение выводов микросхемы.
- Принцип работы микросхемы.
ШИМ, PWM контроллер. Усилитель ошибки. Частота. Инвертирующий, неинвертирующий входы. Синхронизация. Обратная связь. Применение
ШИМ контроллер. Синхронизация. Обратная связь. Задание частоты. (10+)
Широтно-импульсная модуляция — ШИМ контроллер. Частота. Усилитель ошибки
Резистор и конденсатор, задающие частоту работы контроллера (RT, CT). Контроллер работает на определенной частоте. Импульсы следуют с этой частотой. Контроллер меняет длительность импульсов, но не частоту. Это значит, что чем короче импульс, тем длиннее пауза и наоборот, а частота следования остается постоянной. Конденсатор, подключенный между CT и общим проводом, и резистор, подключенный между RT и общим проводом, задают частоту работы контроллера.

Импульсы синхронизации (CLOCK). Иногда необходимо заставить работать несколько контроллеров синхронно. Тогда к одному контроллеру (ведущему) подключают частотозадающие конденсатор и резистор. На ножке CLOCK ведущего контроллера появляются короткие импульсы напряжения. Эти импульсы подаются на ножки CLOCK других контроллеров (ведомых). Ножки RT ведомых контроллеров соединяются с VREF этих контроллеров, а ножки CT — с общим проводом.
Напряжение для сравнения (RAMP). На эту ножку нужно подать пилообразное напряжение. В момент возникновения импульса синхронизации на выходе контроллера появляется открывающее управляющее напряжение. Далее, как только напряжение на RAMP превышает напряжение на выходе усилителя ошибки на определенную величину, на выходе возникает закрывающее напряжение. Так что импульс длится от момента синхронизационного импульса до момента превышения напряжения на RAMP над напряжением выхода усилителя ошибки. Этим и достигается ШИМ. В классической схеме на RAMP подается напряжение с CT. Там как раз отличная пила. Есть и другие варианты включения.
Вашему вниманию подборки материалов:
Конструирование источников питания и преобразователей напряжения Разработка источников питания и преобразователей напряжения. Типовые схемы. Примеры готовых устройств. Онлайн расчет. Возможность задать вопрос авторам
Практика проектирования электронных схем Искусство разработки устройств. Элементная база. Типовые схемы. Примеры готовых устройств. Подробные описания. Онлайн расчет. Возможность задать вопрос авторам
Инвертирующий и неинвертирующий входы усилителя ошибки (INV, NONINV). На входе ШИМ контроллера стоит обычный операционный усилитель. Это его инвертирующий и неинвертирующий входы. Увеличение напряжения на неинвертирующем входе приводит к увеличению длительности импульсов, уменьшение — к уменьшению. С инвертирующим входом все наоборот. Обычно неинвертирующий вход подключают к ножке опорного напряжения, а на инвертирующий вывод подают выходное напряжение через делитель и цепь обратной связи.
Выход усилителя ошибки (EAOUT). Казалось бы, нет ничего проще. Подаем на NONINV опорное напряжение, но INV — часть выходного напряжения, такую, чтобы она равнялась опорному при нужном выходном. Но так ничего не получится в связи с тем, что преобразователь напряжения имеет довольно медленную реакцию на управление. Пока выходное напряжение увеличится или уменьшится, проходит довольно большое время. Так что если подать выходное напряжение через делитель непосредственно на INV, то полученная отрицательная обратная связь на некоторой частоте из-за задержки превратится в положительную. Устройство возбудится, на выходе появится вместо требуемого сигнал сложной формы. Из-за возбуждения устройство, скорее всего, выйдет из строя. Чтобы победить возбуждение, используется выход EOUT. С него сигнал через частотно зависимые цепи подается на INV, достигается частотная коррекция усилителя ошибки. Есть целая теория, которая описывает, как вычислить нужные номиналы частотокорректирующих цепей. Но проводя расчеты в соответствии с этой теорией, мы никогда не получали точно подходящих значений. Мы выработали собственную методику проектирования цепей обратной связи по напряжению. Об этом будет отдельная статья. Подпишитесь на новости, чтобы не пропустить
К сожалению в статьях периодически встречаются ошибки, они исправляются, статьи дополняются, развиваются, готовятся новые. Подпишитесь, на новости, чтобы быть в курсе.
Какая минимальная длинна импульса возможна в шим контроллерах (минимальный коэффициент заполнения)? На практике получается что, к примеру, sg3525 запускается с минимальной шириной примерно 1 микросекунда. Есть ли методика расчета этого параметра? Очень актуально при разработке импульсных блоков питания с регулировкой напряжения от нуля вольт. Читать ответ.
Конструирование (проектирование и расчет) источников питания и преобра.
Разработка источников питания и преобразователей напряжения. Типовые схемы. Прим.
Защита силового ключа от перенапряжения. Сброс скачков напряжения на т.
Как защитить силовой транзистор от пробоя броском высокого напряжения. Описание .
Микроконтроллеры — пример простейшей схемы, образец применения. Фузы (.
Самая первая Ваша схема на микро-контроллере. Простой пример. Что такой фузы.
Использование переключающихся конденсаторов в бестрансформаторном исто.
Вариант бестрансформаторной схемы источника питания с переключением конденсаторо.
Автомат периодического включения — выключения нагрузки. Схема, устройс.
Устройство, регулярно (три раза в день на полчаса) автоматически включающее и вы.
Оптроны, оптопары тиристорные, динисторные. MOC3061, MOC3062, MOC3063.
Описание и параметры MOC3061, MOC3062, MOC3063. Применение в тиристорных схемах .
Источник
1.7 Неисправности узч
Если на выходе усилителя отсутствует сигнал, надо убедиться в надежности контактов во входных гнездах усилителя и целостности соединительных шнуров, правильности установки коммутатора входов. Для этого отсоединяют шнур от входа УЗЧ, регулятор громкости устанавливают среднее положение (чтобы не перегружались каскады УЗЧ) и на вход подают сигнал с генератора звуковой частоты напряжением, равным чувствительности входа. При отсутствии генератора можно просто прикоснуться к входным гнездам пинцетом, отверткой и .т. п. Если в громкоговорителе будет слышен сигнал генератора или гудение от прикосновения отверткой и вольтметр или осциллограф а, подключенный параллельно нагрузке, регистрирует наличие сигнала, то усилитель работает, неисправность в соединительных шнурах или источнике сигнала (магнитофоне, проигрывателе).для проверки исправности шнуров нужно их вставить во входные гнёзда УЗЧ и прикоснуться к их контактам; если они исправны — в громкоговорителе слышен звук, в противном случае их нужно проверить омметром (может быть, они присоединены не к тем контактам). Если же при целостности отсутствует сигнал, то после проверки целостности предохранителя и шнура питания приступают к его вскрытию и ремонту. При этом проверяют надежность контактов-разъемов, отсутствие обгорелых, обугленных резисторов, дорожек плат, проводников (особенно в оконечном усилителе мощности), трещин или мельчайших разрушений на корпусах микросхем и транзисторов, электролитических конденсаторов. Затем, соблюдая правила техники безопасности, включают питание УЗЧ и сразу проверяют наличие напряжения (и его величину) в схеме. Если при включении напряжение уменьшается, то это свидетельствует о наличии цепи с большой утечкой тока или коротком замыкании в схеме усилителя или самого источника питания. При этом питание сразу отключают и прикасаются пальцем к корпусам выходных и предвыходных транзисторов, к регулирующему транзистору стабилизатора, обмотке трансформатора питания. Если они горячие, то это признак пробоя этих элементов. В усилителях зарубежного производства часто на плате усилителя мощности находится ряд предохранителей (и нет гнезд предохранителей на корпусе). В этом случае при осмотре необходимо проверить их целостность. Сгоревшие заменить после анализа причин большего тока. О наличии питания косвенно можно судить по характерному шуму в громкоговорителях после включения усилителя.
При нормальном питании каскадов усилителя можно проверить ток покоя (без сигнала) выходного каскада и усилителя в целом. Если же он значительно больше нормы, то это свидетельствует о большой утечке тока в схеме из-за возможных неисправностей электролитических конденсаторов фильтров; стабилитронов, питающих отдельные каскады; пробоя транзисторов; сильного отклонения режима (особенно выходных каскадов).
Если же режим питания каскадов усилителя нормальный, а сигнала на выходе нет, то можно приступать к проверке отдельных блоков усилителя, а затем и каскадов методом промежуточных измерений (на прохождение сигнала).
Обычно, используя этот метод, начинают проверку с последнего каскада, т. е. от выхода к входу схемы. Но если полный усилитель содержит много каскадов, то можно начать проверку с середины схемы. К примеру, подают сигнал ЗЧ на вход усилителя мощности, и если он проходит на выход, то эта часть схемы исправна. Величина напряжения сигнала равна примерно чувствительности входа (в промышленных УЗЧ UBX = 0,7 В, а в малогабаритных радиоприемниках и магнитофонах — десятки мВ). Итак, усилитель мощности исправен, дальше аналогично проверяют блок регуляторов громкости и тембра, предварительный усилитель и др. При этом величина напряжения подаваемого на вход уменьшается примерно в 10 раз на каждый усилительный каскад. Но надо помнить, что пассивные регуляторы тембра ослабляют сигнал примерно в 10 раз.
Если при подаче сигнала на вход усилителя мощности на выходе сигнал отсутствует, то можно начать покаскадную проверку, начиная с выходного. Проверку УЗЧ можно проводить комбинацией методов на прохождение сигнала и измерения параметров. При этом на вход усилителя подают сигнал, а осциллографом контролируют его наличие на выходе усилителя, на выходах отдельных каскадов, до обнаружения каскада на выходе, у которого нет сигнала.
Причинами заниженной выходной мощности УЗЧ могут быть: заниженный уровень сигнала на входе усилителя; заниженное напряжение питания усилителя или отдельных его каскадов (особенно выходных); увеличение сопротивления нагрузки; недостаточная мощность источника питания (при нормальном напряжении источник не дает достаточного тока при увеличении громкости); неисправности в цепях отрицательных обратных связей каскадов и всего усилителя мощности; заниженная чувствительность усилителя мощности (или отдельных его каскадов); нарушение режима работы каскадов (особенно выходных); неисправности разделительных конденсаторов (если они имеются); отсутствие питания одного плеча двухтактного усилителя или выход из строя одного транзистора (при слабой мощности и очень больших искажениях).
Отыскание неисправности можно начать с проверки сопротивления акустической системы уровня входного сигнала (уровня выходного сигнала источника), затем величины напряжения питания схемы, режима питания выходных каскадов. При исправных вышеназванных цепях следует проверить чувствительность усилителя мощности и предварительного усилителя. При заниженной чувствительности (требуется значительно большее напряжение на входе каскада для получения номинальной выходной мощности) более тщательно проверяют режим питания каскада и регулируют его; проверяют цепи, отрицательной обратной связи; корректирующие цепи, включенные параллельно прохождению сигнала; элементы, определяющие усиление микросхем (и цементы коррекции), а затем возможна и замена транзистора, микросхемы на экземпляр с более высоким коэффициентом усиления., Причинами сильных искажений сигнала на выходе усилителя могут быть: завышенный уровень сигнала на входе усилителя или отдельных его блоков и каскадов; завышенная чувствительность усилителя или сдельных его блоков и каскадов; ненормальный режим работы усилительных элементов (особенно выходного каскада); неисправности цепей обратных связей; недостаточная мощность источника питания (искажения при увеличении громкости); неисправности разделительных конденсаторов (если имеются в схеме) и конденсаторов эмиттерных цепей; достаточная мощность или межвитковые замыкания согласующих выходных трансформаторов усилителей с трансформаторными выходными каскадами; недостаточная мощность выходных транзисторов, их перегрев при увеличении мощности); чрезмерно высокий коэффициент усиления вмененных экземпляров транзисторов, микросхем. Эксперименты показали, что нелинейные искажения сигнала в значительной степени зависят от монтажа блоков, каскадов усилителя, мест присоединения заземляющих проводников, экранов, общих проводов питания, мест прокладки и закрепления жгутов и др. Так, к примеру, при подключении общего провода громкоговорителя к плате, коэффициент гармоник усилителя в 3 раза ниже, чем при присоединении его к общему приводу питания. Свою долю в это вносят и оксидные конденсаторы из-за нелинейности их сопротивления утечки. Кроме того, особенности монтажа влияют и на возникновение различных наводок, помех, самовозбуждения и т. п. При ремонте промышленного усилителя, когда вскрыт его монтаж, надо внимательно его осмотреть и запомнить, как он выполнен, где проложены жгуты, где припаяны или привинчены соединения с корпусом и т. п., и после ремонта восстановить весь монтаж и компоновку в первозданном виде.
Причинами завышенного фона с частой 50 Гц, 100 Гц может быть недостаточная фильтрация выпрямленного напряжения. Чтобы убедиться в том, параллельно конденсаторам фильтра питания подключают электролитические конденсаторы большой емкости (тысячи микрофарад) рабочим напряжением выше действующего в схеме. Если в момент присоединения будет замечено уменьшение фона, то причина установлена
Источник
TL494, что это за «зверь» такой?
TL494 (Texas Instruments) — это наверное самый распространённый ШИМ-контроллер, на базе которого создавалась основная масса компьютерных блоков питания, и силовые части различных бытовых приборов.
Да и сейчас эта микросхема довольно популярна среди радиолюбителей, занимающихся построением импульсных блоков питания. Отечественный аналог этой микросхемы — М1114ЕУ4 (КР1114ЕУ4). Кроме того ещё разные зарубежные фирмы выпускают данную микросхему с разными названиями. Например IR3M02 (Sharp), KA7500 (Samsung), MB3759 (Fujitsu). Всё это одна и та же микросхема.
Возраст её гораздо моложе TL431. Выпускаться он начала фирмой Texas Instruments где то с конца 90-х — начала 2000-х годов.
Давайте-ка вместе попробуем разобраться, что она из себя представляет и что это за «зверь» такой? Рассматривать мы будем микросхему TL494 (Texas Instruments).
И так, для начала посмотрим, что у неё внутри.

Состав.
В её составе имеется:
— генератор пилообразного напряжения (ГПН);
— компаратор регулировки мертвого времени (DA1);
— компаратор регулировки ШИМ (DA2);
— усилитель ошибки 1 (DA3), используется в основном по напряжению;
— усилитель ошибки 2 (DA4), используется в основном по сигналу ограничения тока;
— стабильный источник опорного напряжения (ИОН) на 5В с внешним выводом 14;
— схема управления работой выходного каскада.
Потом все её составные части мы конечно рассмотрим и постараемся разобраться, для чего всё это нужно и как всё это работает, но для начала необходимо будет привести её рабочие параметры (характеристики).
Рекомендуемые рабочие параметры.
| Параметры | Мин. | Макс. | Ед. Изм. |
| VCC Напряжение питания | 7 | 40 | В |
| VI Напряжение на входе усилителя | -0,3 | VCC – 2 | В |
| VO Напряжение на коллекторе | 40 | В | |
| Ток коллектора (каждого транзистора) | 200 | мА | |
| Ток обратной связи | 0,3 | мА | |
| fOSC Частота генератора | 1 | 300 | кГц |
| CT Емкость конденсатора генератора | 0,47 | 10000 | нФ |
| RT Сопротивление резистора генератора | 1,8 | 500 | кОм |
| TA Рабочая температура TL494C TL494I |
70 | °C | |
| -40 | 85 | °C |
Предельные её характеристики следующие;
Напряжение питания. 41В
Входное напряжение усилителя. (Vcc+0.3)В
Выходное напряжение коллектора. 41В
Выходной ток коллектора. 250мА
Общая мощность рассеивания в непрерывном режиме. 1Вт
Расположение и назначение выводов микросхемы.
Это не инвертирующий (положительный) вход усилителя ошибки 1.
Если входное напряжение на нём будет ниже, чем напряжение на выводе 2, то на выходе этого усилителя ошибки 1, напряжения не будет (выход будет иметь низкий уровень) и он не будет оказывать никакого влияния на ширину (скважность) выходных импульсов.
Если на этом выводе напряжение будет выше, чем на выводе 2, то на выходе этого усилителя 1, появится напряжение (выход усилителя 1, будет иметь высокий уровень) и ширина (скважность) выходных импульсов будет уменьшаться тем больше, чем выше выходное напряжение этого усилителя (максимум 3,3 вольта).
Это инвертирующий (отрицательный) вход усилителя сигнала ошибки 1.
Если входное напряжение на этом выводе выше, чем на выводе 1, на выходе усилителя ошибки напряжения не будет (выход будет иметь низкий уровень) и он не будет оказывать никакого влияния на ширину (скважность) выходных импульсов.
Если же напряжение на этом выводе ниже, чем на выводе 1, выход усилителя будет иметь высокий уровень.
Усилитель ошибки, это обычный ОУ с коэффициентом усиления порядка = 70..95дБ по постоянному напряжению, (Ку = 1 на частоте 350 кГц). Диапазон входных напряжений ОУ простирается от -0.3В и до напряжения питания, минус 2В. То есть максимальное входное напряжение должно быть ниже напряжения питания минимум на два вольта.
Это выходы усилителей ошибки 1 и 2, соединённых с этим выводом через диоды (схема ИЛИ). Если напряжение на выходе какого-либо усилителя меняется с низкого на высокий уровень, то на выводе 3 оно также переходит в высокий.
Если напряжение на этом выводе превысит 3,3 В, то импульсы на выходе микросхемы пропадают (нулевая скважность).
Если напряжение на этом выводе близко к 0 В, тогда длительность выходных импульсов (скважность) будет максимальна.
Вывод 3 обычно используется для обеспечения ОС усилителей, но если это необходимо, то вывод 3 может быть использован и в качестве входного, для обеспечения изменения ширины импульсов.
Если напряжение на нем высокое (>
3,5 В), то импульсы на выходе МС будут отсутствовать. Блок питания не запустится ни при каких обстоятельствах.
Он управляет диапазоном изменения «мёртвого» времени (англ. Dead-Time Control), в принципе это та же самая скважность.
Если напряжение на нем будет близко к 0 В, то на выходе микросхемы будут, как минимально возможные, так и максимальные по ширине импульсы, что соответственно может задаваться другими входными сигналами (усилители ошибок, вывод 3).
Если напряжение на этом выводе будет около 1,5 В, то ширина выходных импульсов будет в районе 50% от их максимальной ширины.
Если напряжение на этом выводе превысит 3,3 В, то импульсы на выходе МС будут отсутствовать. Блок питания не запустится ни при каких обстоятельствах.
Но стоит не забывать, что при увеличении «мёртвого» времени, диапазон регулировки ШИМ будет уменьшаться.
Изменяя напряжение на выводе 4, можно задавать фиксированную ширину «мёртвого» времени (R-R делителем), осуществить в БП режим мягкого старта (R-C цепочкой), обеспечить дистанционное выключение МС (ключ), а также можно использовать этот вывод, как линейный управляющий вход.
Давайте рассмотрим (для тех, кто не знает), что такое «мёртвое» время и для чего оно нужно.
При работе двухтактной схемы БП, импульсы поочерёдно подаются с выходов микросхемы на базы (затворы) выходных транзисторов. Так как любой транзистор — элемент инерционный, он не может мгновенно закрыться (открыться) при снятии (подаче) сигнала с базы (затвора) выходного транзистора. И если на выходные транзисторы подавать импульсы без «мёртвого» времени (то есть с одного импульс снять и на второй сразу подать), может наступить такой момент, когда один транзистор не успеет закрыться, а второй уже открылся. Тогда весь ток (называется сквозной ток) потечёт через оба открытых транзистора минуя нагрузку (обмотку трансформатора), и так как он ни чем не будет ограничен, выходные транзисторы мгновенно выйдут из строя.
Чтобы такое не произошло, необходимо после окончания одного импульса и до начала следующего — прошло какое-то определённое время, достаточное для надёжного закрытия того выходного транзистора, со входа которого снят управляющий сигнал.
Это время и называется «мёртвым» временем.
Да, ещё если посмотреть рисунок с составом микросхемы, то мы видим, что вывод 4 соединён со входом компаратора регулировки мертвым временем (DA1) через источник напряжения, величиной 0,1-0,12 В. Для чего это сделано?
Это как раз и сделано для того, чтобы максимальная ширина (скважность) выходных импульсов никогда не была равна 100%, для обеспечения безопасной работы выходных (выходного) транзисторов.
То есть если «посадить» вывод 4 на общий провод, то на входе компаратора DA1 всё равно не будет нулевого напряжения, а будет напряжение как раз этой величины (0,1-0,12 В) и импульсы с генератора пилообразного напряжения (ГПН) появятся на выходе микросхемы только тогда, когда их амплитуда на выводе 5, превысит это напряжение. То есть микросхема имеет фиксированный максимальный порог скважности выходных импульсов, который не превысит для однотактного режима работы выходного каскада 95-96%, и для двухтактного режима работы выходного каскада — 47,5-48%.
Это вывод ГПН, он предназначен для подключения к нему времязадающего конденсатора Ct, второй конец которого подсоединяется к общему проводу. Ёмкость его выбирается обычно от 0,01 мкФ до 0,1 мкФ, в зависимости от выходной частоты ГПН импульсов ШИМ-контроллера. Как правило здесь используются конденсаторы высокого качества.
Выходную частоту ГПН можно как раз контролировать на этом выводе. Размах выходного напряжения генератора (амплитуда выходных импульсов) где-то в районе 3-х вольт.
Тоже вывод ГПН, предназначенный для подключения к нему врямя-задающего резистора Rt, второй конец которого подсоединяется к общему проводу.
Величины Rt и Ct определяют выходную частоту ГПН, и рассчитываются по формуле для однотактного режима работы;

Где F, R, C — кГц, кОм, мкФ. Для двухтактного режима работы формула имеет следующий вид;

Для ШИМ-контроллеров других фирм, частота рассчитывается по такой же формуле, за исключением — цифру 1 необходимо будет поменять на 1,1.
Он присоединяется к общему проводу схемы устройства на ШИМ-контроллере.
В составе микросхемы имеется выходной каскад с двумя выходными транзисторами, которые являются ее выходными ключами. Выводы коллекторов и эмиттеров этих транзисторов свободные, и поэтому в зависимости от необходимости, эти транзисторы можно включать в схему для работы как с общим эмиттером, так и с общим коллектором.
В зависимости от напряжения на выводе 13, этот выходной каскад может работать как в двухтактном режиме работы, так и в однотактном. В однотактном режиме работы эти транзисторы можно соединять параллельно для увеличения тока нагрузки, что обычно и делают.
Так вот, вывод 8, это вывод коллектора транзистора 1.
Это вывод эмиттера транзистора 1.
Это вывод эмиттера транзистора 2.
Это коллектор транзистора 2.
К этому выводу подсоединяется «плюс» источника питания TL494CN.
Это вывод выбора режима работы выходного каскада. Если этот вывод подсоединить к общему проводу, выходной каскад будет работать в однотактном режиме. Выходные сигналы на выводах транзисторных ключей будут одинаковыми.
Если подать на этот вывод напряжение +5 В (соединить между собой выводы 13 и 14), то выходные ключи будут работать в двухтактном режиме. Выходные сигналы на выводах транзисторных ключей будут противофазны и частота выходных импульсов будет в два раза меньше.
Это выход стабильного Источника Опорного Напряжения (ИОН), С выходным напряжением +5 В и выходным током до 10 мА, которое может быть использовано в качестве образцового для сравнения в усилителях ошибки, и в других целях.
Он работает точно так же, как и вывод 2. Если второй усилитель ошибки не используется, то вывод 15 просто подключают к 14-му выводу (опорное напряжение +5 В).
Он работает так же, как и вывод 1. Если второй усилитель ошибки не используется, то его обычно подключают к общему проводу (вывод 7).
С выводом 15, подключенным к +5 В и выводом 16, подключенным к общему проводу, выходное напряжение второго усилителя отсутствует, поэтому он не оказывает никакого влияния на работу микросхемы.
Принцип работы микросхемы.
Так как же работает ШИМ-контроллер TL494.
Выше мы подробно рассмотрели назначение выводов этой микросхемы и какую функцию они выполняют.
Если всё это тщательно проанализировать, то из всего этого становится ясно, как работает эта микросхема. Но я ещё раз очень кратко опишу принцип её работы.
При типовом включении микросхемы и подаче на неё питания (минус на вывод 7, плюс на вывод 12), ГПН начинает вырабатывать пилообразные импульсы, амплитудой около 3-х вольт, частота которых зависит от подключенных С и R к выводам 5 и 6 микросхемы.
Если величина управляющих сигналов (на выводе 3 и 4) меньше 3-х вольт, то на выходных ключах микросхемы появляются прямоугольные импульсы, ширина которых (скважность) зависит от величины управляющих сигналов на выводе 3 и 4.
То есть в микросхеме идёт сравнение положительного пилообразного напряжения с конденсатора Ct (C1) с любым из двух управляющих сигналов.
Логические схемы управления выходными транзисторами VT1 и VT2, открывают их только тогда, когда напряжение пилообразных импульсов выше сигналов управления. И чем больше эта разница, тем шире выходной импульс (больше скважность).
Управляющее напряжение на выводе 3 в свою очередь зависит от сигналов на входах операционных усилителей (усилителей ошибок), которые в свою очередь могут контролировать выходное напряжение и выходной ток БП.
Таким образом, увеличение или уменьшение величины какого либо управляющего сигнала, вызывает соответственно линейное уменьшение или увеличение ширины импульсов напряжения на выходах микросхемы.
В качестве управляющих сигналов, как уже было сказано выше, может быть использовано напряжение с вывода 4 (управление «мертвым временем»), входы усилителей ошибки или вход сигнала обратной связи непосредственно с вывода 3.
Теория, как говорится теорией, но гораздо будет лучше всё это посмотреть и «пощупать» на практике, поэтому соберём на макетной плате следующую схемку и посмотрим воочию, как всё это работает.
Самый простой и быстрый способ — собрать всё это на макетной плате. Да, микросхему я поставил КА7500. Вывод «13» микросхемы посадил на общий провод, то есть у нас выходные ключи будут работать в однотактном режиме (сигналы на транзисторах будут одинаковыми), а частота повторения выходных импульсов, будет соответствовать частоте пилообразного напряжения ГПН.
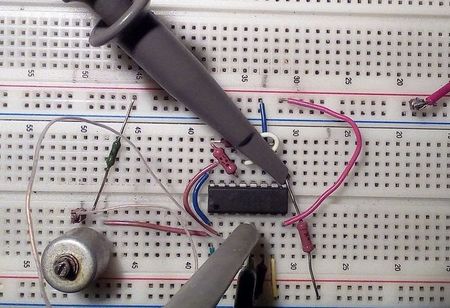
Осциллограф я подключил к следующим контрольным точкам:
— Первый луч к выводу «4», для контроля постоянного напряжения на этом выводе. Находится в центре экрана на нулевой линии. Чувствительность — 1 вольт на деление;
— Второй луч к выводу «5», для контроля пилообразного напряжения ГПН. Находится он так же на нулевой линии (совмещены оба луча) в центре осциллографа и с такой же чувствительностью;
— Третий луч на выход микросхемы к выводу «9», для контроля импульсов на выходе микросхемы. Чувствительность луча 5 вольт на деление (0,5 вольт, плюс делитель на 10). Находится в нижней части экрана осциллографа.
Забыл сказать, выходные ключи микросхемы подключены с общим коллектором. По другому сказать — по схеме эмиттерного повторителя. Почему повторителя? Потому что сигнал на эмиттере транзистора в точности повторяет сигнал базы, чтобы нам всё было хорошо видно.
Если снимать сигнал с коллектора транзистора, то он будет инвертирован (перевёрнут) по отношению к сигналу базы.
Подаём питание на микросхему и смотрим что у нас имеется на выводах.
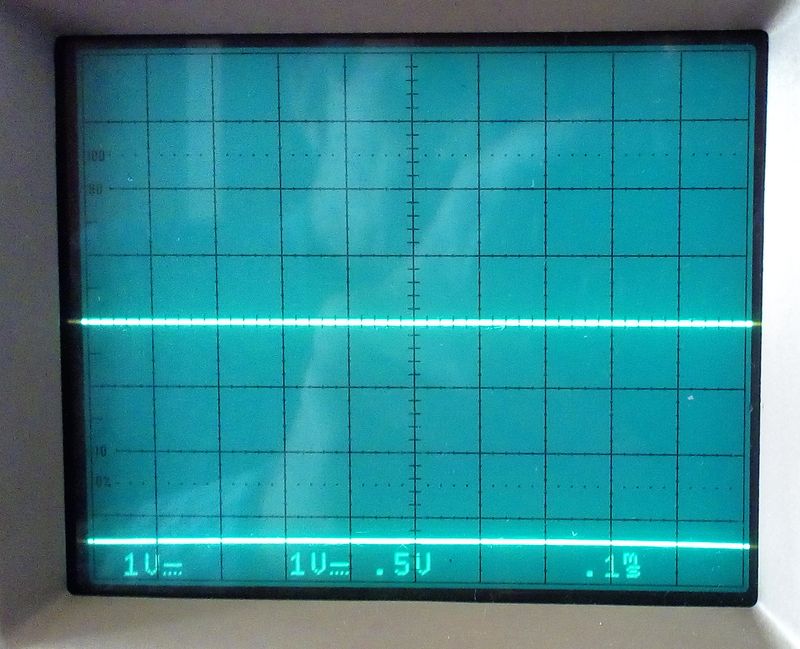
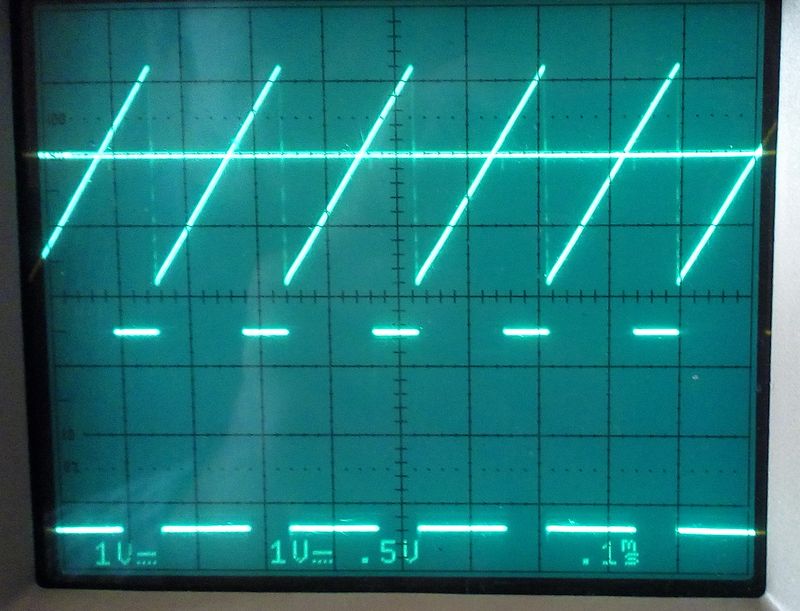
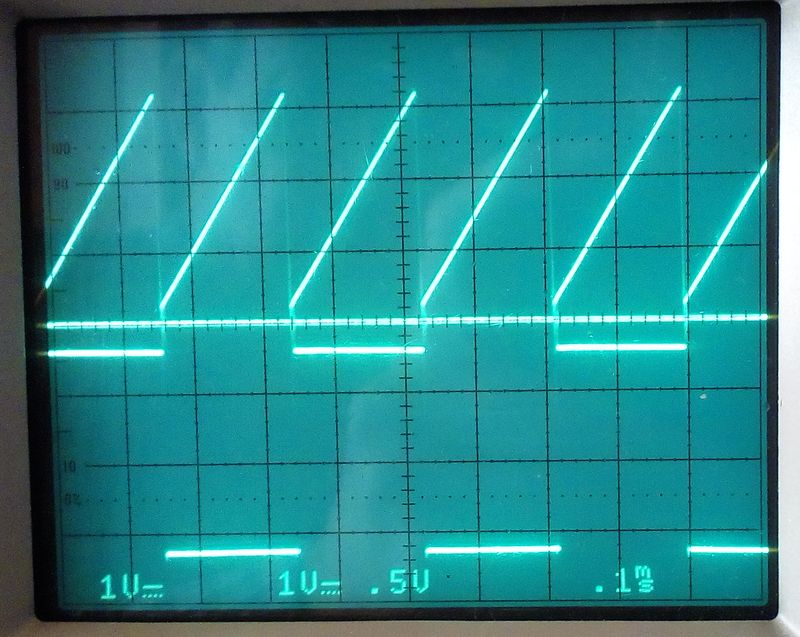
На четвёртой ножке у нас ноль (бегунок подстроечного резистора в крайнем нижнем положении), первый луч находится на нулевой линии в центре экрана. Усилители ошибки тоже не работают.
На пятой ножке мы видим пилообразное напряжение ГПН (второй луч), амплитудой чуть больше 3-х вольт.
На выходе микросхемы (вывод 9) мы видим прямоугольные импульсы, амплитудой около 15-ти вольт и максимальной ширины (96%). Точки в нижней части экрана — это как раз фиксированный порог скважности и есть. Чтобы его было лучше видно, включим растяжку на осциллографе.
Ну вот, сейчас видно лучше. Это как раз и есть время, когда амплитуда импульса падает до нуля и выходной транзистор закрыт это короткое время. Уровень нуля для этого луча в нижней части экрана.
Ну что, давайте добавим напряжение на вывод «4» и посмотрим что у нас получается.
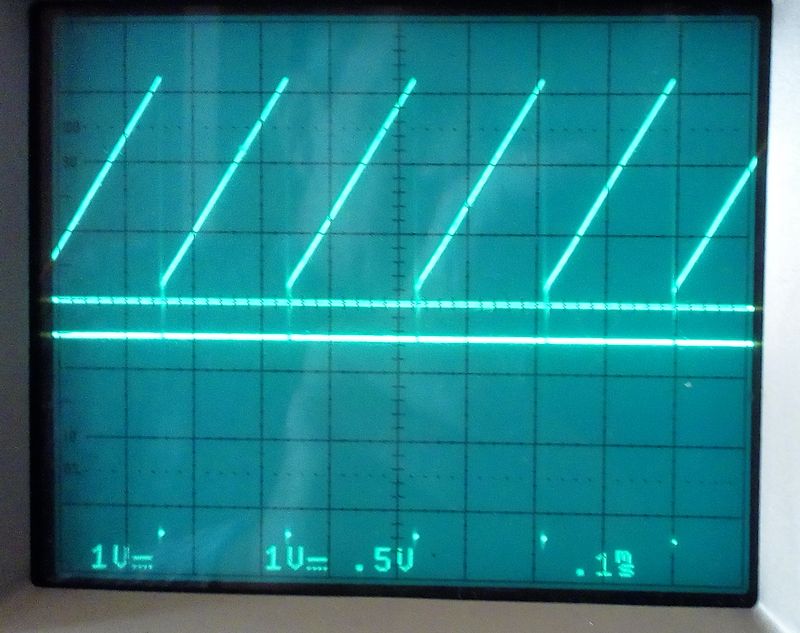
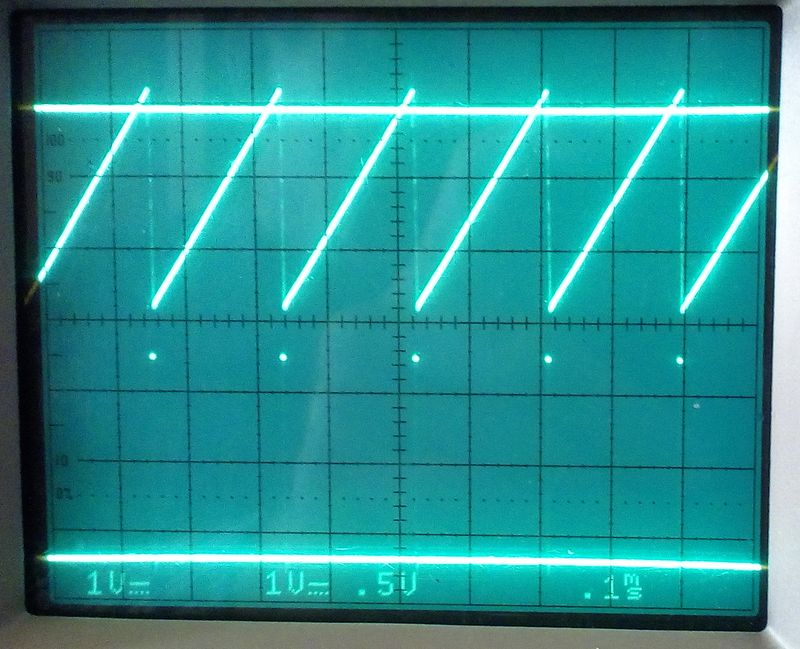
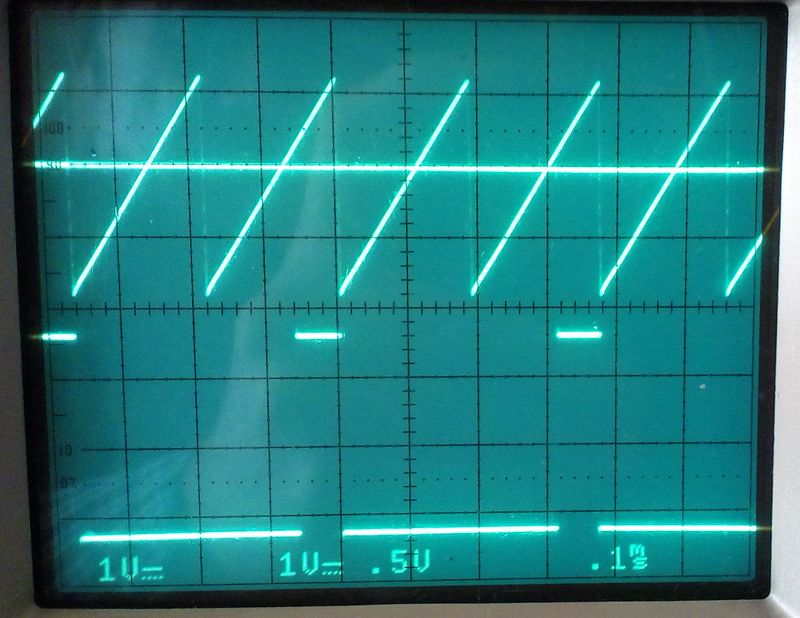
На выводе «4» подстроечным резистором я установил постоянное напряжение величиной 1 вольт, первый луч поднялся на одно деление (прямая линия на экране осциллографа). Что мы видим? Мёртвое время увеличилось (уменьшилась скважность), это пунктирная линия в нижней части экрана. То есть выходной транзистор закрыт на время уже примерно на половину длительности самого импульса.
Добавим ещё один вольт подстроечным резистором на вывод «4» микросхемы.
Мы видим, что первый луч поднялся ещё на одно деление вверх, длительность выходных импульсов стала ещё меньше (1/3 от длительности всего импульса), а мёртвое время (время закрытия выходного транзистора) увеличилось до двух третьей. То есть наглядно видно, что логика микросхемы сравнивает уровень сигнала ГПН с уровнем управляющего сигнала, и пропускает на выход только тот сигнал ГПН, уровень которого выше управляющего сигнала.
Чтобы стало ещё понятней — длительность (ширина) выходных импульсов микросхемы будет такой, какой является длительность (ширина) выходных импульсов пилообразного напряжения находящихся выше уровня управляющего сигнала (выше прямой линии на экране осциллографа).
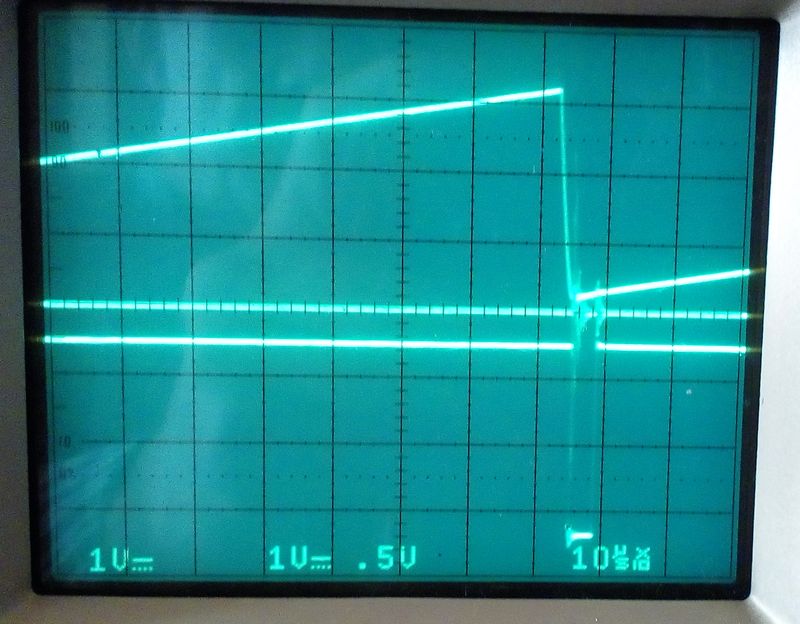
Идём дальше, добавляем ещё один вольт на вывод «4» микросхемы. Что мы видим? На выходе микросхемы очень короткие импульсы, по ширине примерно такие же, как и выступающие выше прямой линии верхушки пилообразного напряжения. Включим растяжку на осциллографе, чтобы импульс было лучше видно.
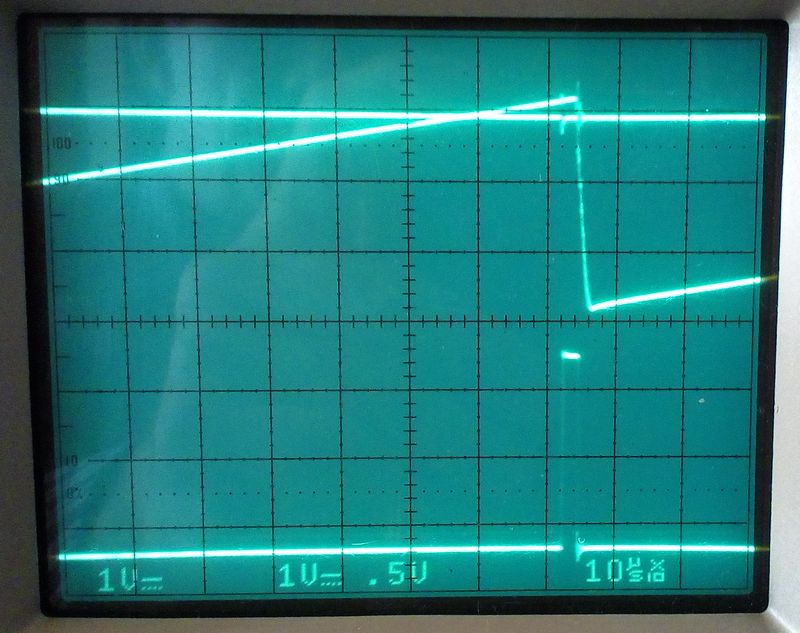
Вот, мы видим короткий импульс, в течении которого выходной транзистор будет открыт, а всё остальное время (нижняя линия на экране) будет закрыт.
Ну что, попробуем поднять напряжение на выводе «4» ещё больше. Ставим подстроечным резистором напряжение на выводе выше уровня пилообразного напряжения ГПН.
Ну всё, БП у нас перестанет работать, так как на выходе полный «штиль». Выходных импульсов нет, так как на управляющем выводе «4» у нас постоянное напряжение уровнем больше 3,3 вольта.
Абсолютно то же самое будет, если подавать управляющий сигнал и на вывод «3», или на какой либо усилитель ошибки. Кому интересно, можете сами проверить опытным путём. Притом, если управляющие сигналы будут сразу на всех управляющих выводах, управлять микросхемой (преобладать), будет сигнал с того управляющего вывода, амплитуда которого больше.
Ну что, давайте попробуем отключить вывод «13» от общего провода и подсоединить его к выводу «14», то есть переключить режим работы выходных ключей из однотактного в двухтактный. Посмотрим, что у нас получится.
Подстроечным резистором выводим опять напряжение на выводе «4» на ноль. Включаем питание. Что мы видим?
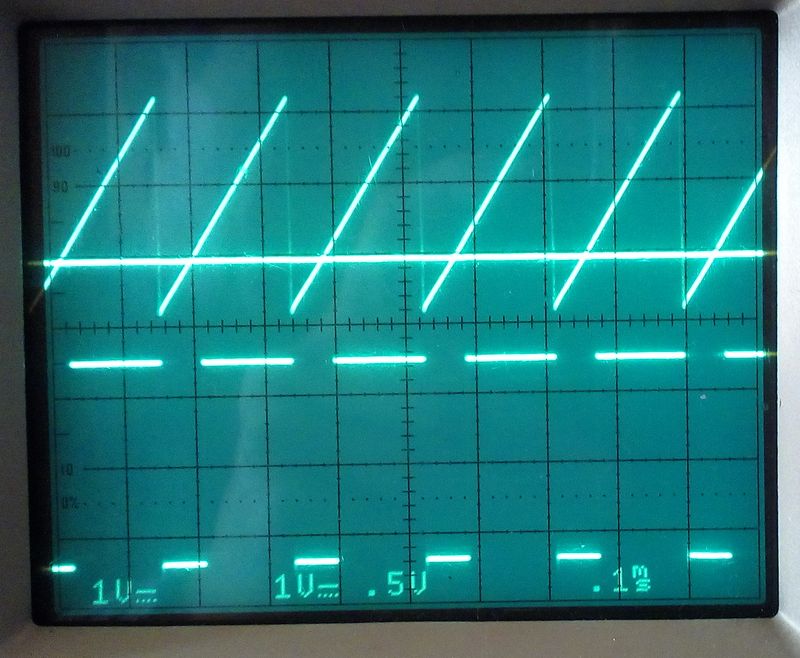
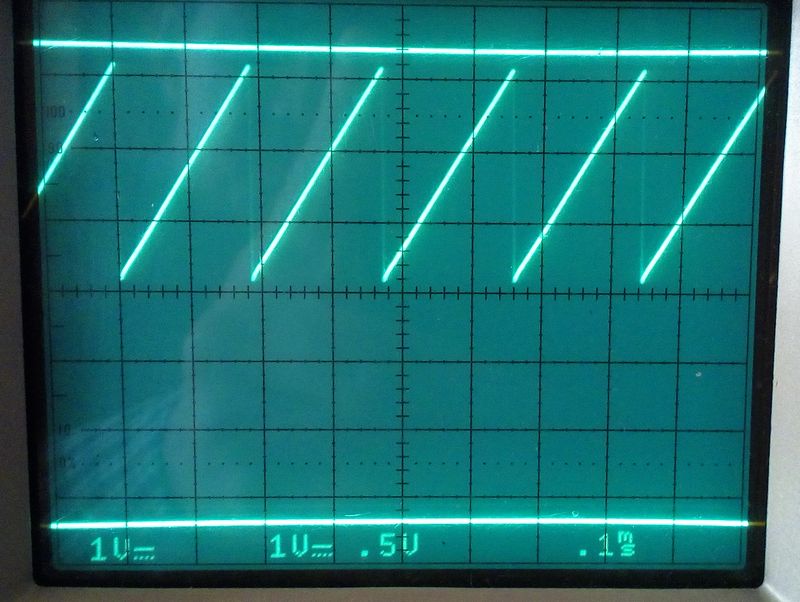
На выходе микросхемы так же присутствуют прямоугольные импульсы максимальной длительности, но их частота следования стала в два раза меньше частоты пилообразных импульсов.
Такие же самые импульсы будут и на втором ключевом транзисторе микросхемы (вывод 10), с той лишь разницей, что они будут сдвинуты по времени относительно этих на 180 градусов.
Здесь так же присутствует максимальный порог скважности (2%). Сейчас его не видно, нужно подключать 4-й луч осциллографа и совмещать вместе два выходных сигнала. Щупа четвёртого нет под рукой, поэтому этого не сделал. Кто хочет, проверьте практически сами, чтобы в этом удостовериться.
В таком режиме микросхема работает точно так же, как и в однотактном режиме, лишь с той разницей, что максимальная длительность выходных импульсов здесь не будет превышать 48% от общей длительности импульса.
Так что долго рассматривать этот режим мы не будем, а просто посмотрим, какие у нас будут импульсы при напряжении на выводе «4» в два вольта.
Поднимаем напряжение подстроечным резистором. Ширина выходных импульсов уменьшилась до 1/6 общей длительности импульса, то есть тоже ровно в два раза, чем в однотактном режиме работы выходных ключей (там в 1/3 раза).
На выводе второго транзистора (вывод 10) будут такие же импульсы, только сдвинутые по времени на 180 градусов.
Ну вот в принципе мы и разобрали работу ШИМ контроллера.
Ещё по выводу «4». Как говорилось раньше, этот вывод можно использовать для «мягкого» старта блока питания. Как это организовать?
Очень просто. Для этого подключаем к выводу «4» RC цепочку. Вот например фрагмент схемы:
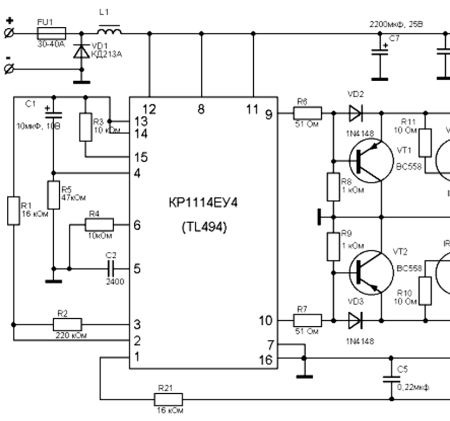
Как здесь работает «мягкий старт»? Смотрим схему. Конденсатор С1 через резистор R5 подключен к ИОН (+5 вольт).
При подаче питания на микросхему (вывод 12), на выводе 14 появляется +5 вольт. Начинает заряжаться конденсатор С1. Через резистор R5 протекает зарядный ток конденсатора, в момент включения он максимальный (конденсатор разряжен) и на резисторе возникает падение напряжения 5 вольт, которое подаётся на вывод «4». Это напряжение, как мы уже выяснили опытным путём, запрещает прохождение импульсов на выход микросхемы.
По мере заряда конденсатора, зарядный ток уменьшается и соответственно уменьшается и падение напряжения на резисторе. Напряжение на выводе «4» также уменьшается и на выходе микросхемы начинают появляться импульсы, длительность которых постепенно увеличивается (по мере заряда конденсатора). Когда конденсатор зарядится полностью — зарядный ток прекращается, напряжение на выводе «4» становится близко к нулю, и вывод «4» больше не оказывает влияния на длительность выходных импульсов. Блок питания выходит на свой рабочий режим.
Естественно Вы догадались, что время запуска БП (выхода его на рабочий режим) будет зависеть от величины резистора и конденсатора, и их подбором можно будет регулировать это время.
Ну вот, это кратко вся теория и практика, и ничего здесь особо сложного нет, и если Вы поймёте и разберётесь в работе этого ШИМ-а, то Вам не составит никакого труда разобраться и понять работу других ШИМ-ов.
Источник
Форум РадиоКот :: Просмотр темы — Вопрос по усилителям ошибки в TL494.
| Автор: | nogik5 [ Вт май 31, 2016 01:17:29 ] |
| Заголовок сообщения: | Вопрос по усилителям ошибки в TL494. |
|
Сегодня решил почитать еще раз даташит по TL494. Вот текст из даташита на русском. |
| Автор: | Vladlog [ Вт май 31, 2016 01:50:04 ] |
| Заголовок сообщения: | Re: Вопрос по усилителям ошибки в TL494. |
|
nogik5 писал(а): это значит на втором также организуется ООС и все будет работать? Там перевод какой-то проблемный. Даже в оригинальном даташите показана возможность подключения ОС на оба усилителя: |

| Автор: | Телекот [ Вт май 31, 2016 08:01:39 ] |
| Заголовок сообщения: | Re: Вопрос по усилителям ошибки в TL494. |
|
Усилители равноценны но работать будет только один. Как и блок питания может работать только в одном из режимов, стабилизация напряжения или стабилизация тока. Одновременно 2 режима невозможны. |
| Автор: | Vladlog [ Вт май 31, 2016 08:04:58 ] |
| Заголовок сообщения: | Re: Вопрос по усилителям ошибки в TL494. |
|
Телекот писал(а): Одновременно 2 режима невозможны. Как я понял, автор это понимает. |
| Автор: | Телекот [ Вт май 31, 2016 08:11:53 ] |
| Заголовок сообщения: | Re: Вопрос по усилителям ошибки в TL494. |
|
Тогда пускай читает только третье предложение. |
| Автор: | nogik5 [ Вт май 31, 2016 09:22:26 ] |
| Заголовок сообщения: | Re: Вопрос по усилителям ошибки в TL494. |
|
Спасибо. Теперь понятно. А почему в некоторых схемах в интернете с третьей ноги микросхемы не заведена ООС на усилители ошибки, ведь тогда они становятся компараторами? |
| Автор: | Телекот [ Вт май 31, 2016 10:43:02 ] |
| Заголовок сообщения: | Re: Вопрос по усилителям ошибки в TL494. |
|
Нет ОС получается через весь блок питания. Другое дало что она при этом жутко опаздывает и ОС начинает возбуждаться, появляются писки и жужжания в дросселе. В нормальных схемах обычно вводят частотно зависимую коррекцию местной ОС с выхода усилителя ошибки. |
| Автор: | Starichok51 [ Вт май 31, 2016 11:33:47 ] |
| Заголовок сообщения: | Re: Вопрос по усилителям ошибки в TL494. |
|
да, без местной ООС УО превращается в компаратор. |
| Автор: | Телекот [ Вт май 31, 2016 11:41:37 ] |
| Заголовок сообщения: | Re: Вопрос по усилителям ошибки в TL494. |
|
У компаратора 2 выходных уровня 0 и 1, промежуточных состояний нет. Это не совсем подходит к данному случаю. Просто медленная общая ОС начинает возбуждаться на частоте где ОС превращается в положительную. На выходе усилителей обычно тогда несколько синусоид разной амплитудой. |
| Автор: | nogik5 [ Вт май 31, 2016 15:28:32 ] |
| Заголовок сообщения: | Re: Вопрос по усилителям ошибки в TL494. |
|
Спасибо, теперь я все понял. Если я хочу сделать регулятор, то ставлю RC цепь на 3 ногу со 2 или 15 ногой, она не позволит усиливать высокочастотную составляющую из-за которой шим и скачет, также не забываю поставить резистор большего номинала параллельно с RC цепью, для постоянного тока, который заведет ООС по постоянному току, чтобы и по постоянному току усилители ошибки не превращались в компараторы. |
| Автор: | calmikow1988 [ Чт апр 22, 2021 03:55:23 ] |
| Заголовок сообщения: | Re: Вопрос по усилителям ошибки в TL494. |
|
Здравствуйте. Очень хотелось бы подробней узнать про настройку оос на тл494. Я примерно понимаю что нужно настраивать ачх и фчх. Но не могу разложить все по полочкам. Большая просьба разясните на что влияет уменьшение или увеличение конденсатора и резистора в цепи между 2 и 3 ногой. Может это как-то можно рассчитать или методом перебора это все делается. Кому не сложно поделитесь знаниями. Заранее спасибо |
| Автор: | Телекот [ Чт апр 22, 2021 04:43:04 ] |
| Заголовок сообщения: | Re: Вопрос по усилителям ошибки в TL494. |
|
Методом подбора. |
| Автор: | calmikow1988 [ Чт апр 22, 2021 06:11:38 ] |
| Заголовок сообщения: | Re: Вопрос по усилителям ошибки в TL494. |
|
Хорошо метод подбора я понял. Ну а в процессе подбора на что обращать внимание? У Вас здесь у многих большой опыт в данной теме. Как мне узнать запаздывает ли стабилизация и пропускает ли частотные помехи. |
| Автор: | Телекот [ Чт апр 22, 2021 06:42:49 ] |
| Заголовок сообщения: | Re: Вопрос по усилителям ошибки в TL494. |
|
У всех разная методика. |
| Автор: | 12943 [ Чт апр 22, 2021 06:50:54 ] |
| Заголовок сообщения: | Re: Вопрос по усилителям ошибки в TL494. |
|
Монтаж и взаимное расположение не должны быть выполнены с нарушениями известных правил. На этом их ощутимое влияние закончится раз и навсегда. |
| Автор: | Телекот [ Чт апр 22, 2021 06:55:16 ] |
| Заголовок сообщения: | Re: Вопрос по усилителям ошибки в TL494. |
|
12943 писал(а): На этом их ощутимое влияние закончится раз и навсегда. Не заканчивается. 12943 писал(а): то нужно научиться работать в симуляторе В этом вопросе симулятор и железо совсем разная вещь. |
| Автор: | pavel2000 [ Чт апр 22, 2021 07:04:04 ] |
| Заголовок сообщения: | Re: Вопрос по усилителям ошибки в TL494. |
|
У всех разная методика. Можно поподробнее расписать вашу методику? Как проверяется устойчивость, какие действия выполняются, по шагам? |
| Автор: | Телекот [ Чт апр 22, 2021 07:08:47 ] |
| Заголовок сообщения: | Re: Вопрос по усилителям ошибки в TL494. |
|
Постепенно увеличиваю ёмкость. пока схема не станет работать устойчива, потом ставлю конденсатор в 2 раза больше и увеличиваю резистор пока схема сохраняет устойчивость. Что здесь не понятного. |
| Автор: | calmikow1988 [ Чт апр 22, 2021 07:38:24 ] |
| Заголовок сообщения: | Re: Вопрос по усилителям ошибки в TL494. |
|
|
| Автор: | otest [ Чт апр 22, 2021 08:43:06 ] |
| Заголовок сообщения: | Re: Вопрос по усилителям ошибки в TL494. |
|
Всё не понятно Цитата: стремясь получить наименьшую ёмкость….Постепенно увеличиваю ёмкость…потом ставлю конденсатор в 2 раза больше |
| Страница 1 из 5 | Часовой пояс: UTC + 3 часа |
| Powered by phpBB © 2000, 2002, 2005, 2007 phpBB Group http://www.phpbb.com/ |
Усилитель — сигнал — ошибка
Cтраница 2
Принцип, возможности схемы, вытекающие из ур-ний ( 1) и ( 2), ограничиваются в первую очередь дрейфом усилителя сигнала ошибки.
[17]
Следующий шаг состоит в выборе регулятора, который часто представляет собой сумматор, выполняющий операцию сравнения желаемого и действительного значений выходной переменной объекта, и следующий за ним усилитель сигнала ошибки.
[18]
Синтезатор частоты гетеродина 9 в схеме рис. 5.11 строится по более простой схеме ФАПЧ, показанной на рис. 5.13. На схеме обозначены: / и 5 — делители частоты с коэффициентами деления k и Л /; 2 — ФД, 3 — ФНЧ; 4 — усилитель сигнала ошибки; 6 — формирователь импульсов; 7 — управляемый генератор; 8 — варикап. ТВ радиоканала, коэффициент деления Nt делителя 5 выполняется переменным.
[20]
При подаче напряжения [ / вх на вход усилителя сигнала ошибки, на выходе УСО появляется напряжение U, которое подается на обмотку катушки управления ЭМП.
[21]
На рис. 2 приведены частотные характеристики предварительного усилителя, усилителя сигнала ошибки, модулятора с задающим каскадом, задающего каскада и модулятора. Характеристика лампы задающего каскада была получена путем подачи постоянного напряжения на сетку и измерения тока в катушке модулятора по потенциалу на небольшом сопротивлении, включенном последовательно с ним.
[23]
В качестве примера такого подхода рассмотрим задачу структурно-компоновочного синтеза приводов подач станков с ЧПУ. Согласно табл. 12, можно составить схему обобщенного привода подач станка с ЧПУ ( табл. 27), в которую входят сравнивающее устройство, преобразующее устройство ПР, усилитель сигнала ошибки У, усилители мощности первого, второго и третьего каскада УМ1г УМ, УМ3, исполнительный двигатель ИД, без-люфтовый редуктор БР, шариковая винтовая пара ШВП и датчик положения или перемещения стола Д; U — входной сигнал, у — перемещение стола. В качестве преобразующих устройств используются электромеханические преобразователи ( ЭМП), шаговые двигатели ШД и электронные устройства ЭУ.
[24]
Источник опорного напряжения Uon выполнен на стабилитроне VD и гасящем сопротивлении Rr. Усилитель сигнала ошибки УСО выполнен на операционном усилителе ОУ. Регулирующий элемент построен на транзисторе VT по схеме эмиттерного повторителя. Коэффициент передачи такого регулирующего элемента близок к единице.
[25]
Золотник, перемещаясь по заданному закону, открывает и закрывает рабочие окна, соединяя полости гидродвигателя с напорной или сливной магистралями. Это позволяет обеспечить необходимую точность воспроизведения формы вибровоздействия. На функциональной схеме ЭГСВ также обозначены: ГФВН — генератор случайных функций вибрационных нагружений ( генератор случайных входных сигналов), УСО — усилитель сигнала ошибки.
[26]
Сульфидо-свинцовые фотоэлементы, чувствительные вплоть до 3 мк, часто используются для низкотемпературной пирометрии. В этом приборе используется регулируемый источник сравнения, а фотоэлемент служит только в качестве нуль-индикатора. Вращающаяся заслонка прерывает световой поток с частотой 1 кгц. Излучение от источника сравнения отражается от противоположной зеркальной лопатки прерывателя и поэтому находится в противофа-зе. Результирующий сигнал частотой 1 кгц проходит через усилитель сигнала ошибки и выпрямляется фазочувствительным выпрямителем, создавая управляющее напряжение постоянного тока. Оконечный сигнал ошибки подается на обмотку управления магнитного усилителя, который регулирует мощность питания лампы сравнения.
[27]
Входные сигналы для этих каналов вырабатывает специальная схема, реагирующая на отклонение оси рефлектора от направления на цель в обеих плоскостях. Благодаря тому, что ось излучателя смещена по отношению к оси рефлектора на малый угол ( например, 1 5), при вращении излучателя осуществляется модуляция отраженных от цели импульсов. Глубина модуляции характеризует величину рассогласования между осью рефлектора и направлением на цель, а фаза модуляции определяет знак рассогласования. Благодаря работе схемы АРУ амплитуда видеоимпульсов на выходе приемника не зависит от расстояния до цели и ее размера. С выхода приемника сигнал поступает на вход детектора, на выходе которого выделяется огибающая видеоимпульсов, имеющая частоту, равную частоте вращения излучателя. Это напряжение проходит через фильтр, который сглаживает пульсацию видеоимпульсов и пропускает колебания с частотой вращения излучателя. После фильтра сигнал подается на усилитель сигнала ошибки.
[29]
Полученная в результате сравнения ошибка влияет на силы, стремящиеся изменить выходную переменную. Так, например, действие простейшего рулевого управления корабля состоит в следующем. Штурвал устанавливают в положение, соответствующее желаемому углу поворота руля, причем одновременно измеряется действительное положение руля, и вычитающее устройство определяет рассогласование между ними, или ошибку. В соответствии с этим мощный гидравлический усилитель воздействует на руль с усилием, пропорциональным ошибке. Если руль положен вправо больше, чем нужно, то прикладывается усилие влево. Управление происходит по замкнутому контуру или замкнутому циклу причин и следствий. Поток энергии вдоль контура имеет лишь одно направление — от руля к вычитающему устройству, затем к усилителю сигнала ошибки и опять к рулю.
[30]
Страницы:
1
2
Theoritical considerations for buck mode switching regulators
Carl Nelson, in Analog Circuit Design, 2013
Error Amplifier
The error amplifier in Figure 11 is a single stage design with added inverters to allow the output to swing above and below the common mode input voltage. One side of the amplifier is tied to a trimmed internal reference voltage of 2.21V. The other input is brought out as the FB (feedback) pin. This amplifier has a GM (voltage in to current out) transfer function of ∼5000μmho. Voltage gain is determined by multiplying GM times the total equivalent output loading, consisting of the output resistance of Q4 and Q6 in parallel with the series RC external frequency compensation network. At DC, the external RC is ignored, and with a parallel output impedance for Q4 and Q6 of 400kΩ, voltage gain is ≈2000. At frequencies above a few hertz, voltage gain is determined by the external compensation, RC and CC.

Figure 11. Error Amplifier
AV=Gm2π•f•CCat mid-frequenciesAV=Gm•RCat high frequencies
Phase shift from the FB pin to the VC pin is 90° at mid-frequencies where the external CC is controlling gain, then drops back to 0° (actually 180° since FB is an inverting input) when the reactance of CC is small compared to RC. The low frequency “pole” where the reactance of CC is equal to the output impedance of Q4 and Q6 (r0), is:
FPOLE=12π•r0•Cr0≈400kΩ
Although fPOLE varies as much as 3:1 due to r0 variations, mid-frequency gain is dependent only on GM, which is specified much tighter on the data sheet. The higher frequency “zero” is determined solely by RC and CC:
fZERO=12π•RC•CC
The error amplifier has asymmetrical peak output current. Q3 and Q4 current mirrors are unity gain, but the Q6 mirror has a gain of 1.8 at output null and a gain of 8 when the FB pin is high (Q1 current = 0). This results in a maximum positive output current of 140μA and a maximum negative (sink) output current of =1.1mA. The asymmetry is deliberate—it results in much less regulator output overshoot during rapid start-up or following the release of an output overload. Amplifier offset is kept low by area scaling Q1 and Q2 at 1.8:1.
Amplifier swing is limited by the internal 5.8V supply for positive outputs and by D1 and D2 when the output goes low. Low clamp voltage is approximately one diode drop (−0.7V – 2mV/°C).
Note that both the FB pin and the VC pin have other internal connections. Refer to the frequency shifting and synchronizing discussions.
Read full chapter
URL:
https://www.sciencedirect.com/science/article/pii/B9780123978882000055
Linear regulator
Keng C. Wu, in Power Electronic System Design, 2021
8.1.1.1 Open loop
Surrounding the error amplifier and the output feedback divider, R1 and R2, the inverting input node, Vn, and the noninverting node, Vp, voltages are
(8.1)Vn=R2R1+R2Vo+Vos+R1R2R1+R2Ib,Vp=Vref
The error amplifier output therefore gives
(8.2)V2=A(Vp−Vn)=A(Vref−R2R1+R2Vo−Vos−R1R2R1+R2Ib)
The base-emitter loop of transistor Q1 gives
(8.3)R3IB1+Vbe1+R4(1+hFE1)IB1=V2,approximationIB1=ISeV2−[R3+(1+hFE1)R4]IB1VT,exact
The exact expression invokes transistor p-n junction saturation current, Is, and thermal voltage, VT.
In other words, the Q1 base current (approximation) is
(8.4)IB1=V2−Vbe1R3+R4(1+hFE1)=A(Vref−R2R1+R2Vo−Vos−R1R2R1+R2Ib)−Vbe1R3+R4(1+hFE1)
And the Q2 base current (approximation) is
(8.5)IB2=hFE1IB1−Vbe2R5=hFE1A(Vref−R2R1+R2Vo−Vos−R1R2R1+R2Ib)−Vbe1R3+R4(1+hFE1)−Vbe2R5
Clearly, the output voltage is translated to a control current that is responsible for regulating the output given a known reference, Vref. This concludes the first part.
The other part, power train, yields
(8.6)Vo=(R1+R2)RLR1+R2+RLIC2=(R1+R2)RLR1+R2+RLhFE2·IB2Vi=Vce+Vo
where Vce is the collector-to-emitter drop.
Read full chapter
URL:
https://www.sciencedirect.com/science/article/pii/B9780323885423000017
Current-Fed Converter
Keng Wu, in Power Converters with Digital Filter Feedback Control, 2016
10.5 I-fed converter with digital control
The analog error amplifier identified in Section 10.3, following the modulator gain evaluation, is transformed to the z-domain with a bilinear transformation constant C = 2 MHz (converter switching frequency 100 kHz, sampling frequency 1 MHz, transform constant = twice of sampling). The resulting z-domain digital filter function is in the form of (1.23) with these coefficients,
a0=7.451×10−4a1=−7.337×10−4a2=−7.451×10−4a3=7.338×10−4 b1=−2.959b2=2.919b3=−0.96
Figure 10.7a–d shows the SIMULINK schematic with digital filter and performance in time domain.





Figure 10.7. SIMULINK Schematic with Digital Filter.
(a) Inductor current, (b) secondary current, (c) output voltage, and (d) input current.
Read full chapter
URL:
https://www.sciencedirect.com/science/article/pii/B9780128042984000101
Feedback Loop Analysis and Stability
Sanjaya Maniktala, in Switching Power Supplies A — Z (Second Edition), 2012
Pulse-Width Modulator Transfer Function
The output of the error amplifier (sometimes called “COMP,” sometimes “EA-out,” sometimes “control voltage”) is applied to one of the inputs of the PWM comparator. This is the terminal marked “Control” in Figures 12.9 and 12.10. On the other input of this PWM comparator, we apply a sawtooth voltage ramp — either internally generated from the clock when using “voltage-mode control,” or derived from the current ramp when using “current-mode control” (explained later). Thereafter, by standard comparator action, we get pulses of desired width with which to drive the switch.
Since the feedback signal coming from the output rail of the power supply goes to the inverting input of the error amplifier, if the output is below the set regulation level, the output of the error amplifier goes high. This causes the PWM to increase the pulse width (duty cycle) and thus try to make the output voltage rise. Similarly, if the output of the power supply goes above its set value, the error amplifier output goes low, causing the duty cycle to decrease (see upper third of Figure 12.11).
As mentioned previously, the output of the PWM stage is duty cycle, and its input is the “control voltage” or the “EA-out.” So, as we said, the gain of this stage is not a dimensionless quantity, but has units of 1/V. From the middle of Figure 12.11, we can see that this gain is equal to 1/VRAMP, where VRAMP is the peak-to-peak amplitude of the ramp sawtooth.
Read full chapter
URL:
https://www.sciencedirect.com/science/article/pii/B9780123865335000127
DCM Boost Converter with Voltage-Mode Control
Keng Wu, in Power Converters with Digital Filter Feedback Control, 2016
7.6 Conversion to digital control
We now want to convert the analog error amplifier, EA(s), identified in Section 7.4, to its digital equivalent H(z). It turns out that some property not well understood, at least to this author, exists. From the EA(ω) plot in frequency domain, 100 kHz sampling was thought to be a good choice, but it ends up having a frequency response, H(ω), that is utterly incompatible as shown in Figure 7.8, with the analog version.

Figure 7.8. Incompatible Digital Filter Sampled at 100 kHz.
Increasing the sampling frequency to 300 kHz improves matching, Figure 7.9, with losses in high frequency.

Figure 7.9. Improved Matching at 300 kHz Sampling.
Increasing the sampling frequency further to 800 kHz improves more, Figure 7.10, but further increase to 900 kHz makes it worse. We therefore settle for sampling at 800 kHz.

Figure 7.10. Better Matching at High Frequency with 800 kHz Sampling.
At 800 kHz sampling, the polynomial coefficients for the corresponding HII(z), (1.19), is given as,
a0=5.392×10−3a1=38.663×10−6a2=−5.353×10−3 b1=−1.991×10−0b2=991.465×10−3
With the digital filter identified, Figure 7.1 is transformed to its digital control version, Figure 7.11. The digital filter is also proved to be stable, Figure 7.12, with poles within the unit circle of z-plane.

Figure 7.11. Boost Converter with Digital Filter in Feedback Loop.

Figure 7.12. Digital Filter is Stable.
Read full chapter
URL:
https://www.sciencedirect.com/science/article/pii/B9780128042984000071
Forward Converter with Voltage-Mode Control
Keng Wu, in Power Converters with Digital Filter Feedback Control, 2016
1.7 Other approaches and considerations
In the process of converting an analog error amplifier to digital in Section 1.4, the bilinear transform was invoked. The transform is considered valid, based on the fact of acceptable mathematical approximation alone. It does not take into consideration its physical significance. Briefly, in particular the choice of constant C, there were many choices, none perfect. One approach attempts to match both at a single, chosen frequency. In another, the responses of both versions across a low frequency band are made almost equal. Both efforts set an eye on the performance in the frequency domain. There are alternatives, of course, and that is changing the focus to the time domain. One is called impulse invariance method. It implies that the impulse response of a digital filter is forced to be identical to the impulse of its analog counterpart. It is basically a procedural matter that does not require cumbersome theoretical support. We outline only the process here and will give a demonstration later in an example.
Three steps are called for in the impulse invariance method. Step one takes the inverse Laplace transform of the analog compensator function (inverting sign excluded), identified by way of Section 1.3. This yields the time-domain impulse response of the corresponding analog amplifier. Step two takes z-transform of the impulse response function in the time domain. Then the last step follows by arranging the z-domain function in the form of (1.24).
In the analog world, circuit operations and performances are sensitive to the value of components. Digital filters obtained through the above fare even worse by the fact of (1.17), (1.19), (1.20), and (1.23). The performance of a digital filter is extremely sensitive to the coefficients of its numerator and denominator polynomial. Readers are strongly advised to retain coefficients’ numerical precision to at the least 10 decimal places.
The last, but not the least, concern is the local stability of the compensator. Poles of HII(z) in (1.19), HIII(z) in (1.23), or in general, H(z) of (1.24), must lie within the unit circle in the z-plane. We will see to it in the example to follow.
Read full chapter
URL:
https://www.sciencedirect.com/science/article/pii/B9780128042984000010
Forward Converter with Current-Mode Control
Keng Wu, in Power Converters with Digital Filter Feedback Control, 2016
2.5 Matlab SIMULINK simulation
In both Figures 2.1 and 2.2, a type-III error amplifier was employed for demonstration purpose as well as for a 60°-phase margin. It turns out that if the desired phase margin is reduced to 45° at the same crossover frequency of 10 kHz, a type-II error amplifier with two less components can perform just as well for current-mode control. The reader is invited to confirm, with R1a = 2K preselected, C1a = 0.0029 μF, C2a = 0.009 μF, and R2a = 3.6K. In the depictedSIMULINK models, type-II error amplifiers are shown. Figure 2.12 gives a physical device model and Figure 2.12a–h present simulation plots. Figure 2.13 replaces the physical model with continuous transfer function H(s), while Figure 2.14 plugs in the corresponding digital filter.









Figure 2.12. SIMULINK Model with Error Amp Represented by Physical Device.
(a) Output voltage, (b) error voltage, (c) D1 and D2 cathode, (d) input current, (e) switch current, (f) inductor current, (g) D1 current, (h) D2 current.









Figure 2.13. SIMULINK Model with Error Amp in H(s) Form.
(a) Output voltage. (b) error voltage. (c) D1 and D2 cathode. (d) input current. (e) switch current. (f) inductor current. (g) D1 current. (h) D2 current.









Figure 2.14. SIMULINK Model with Error Amp in Hz Form.
(a) Output voltage, (b) error voltage, (c) D1 and D2 cathode, (d) input current. (e) switch current, (f) inductor current, (g) D1 current, (h) D2 current.
Read full chapter
URL:
https://www.sciencedirect.com/science/article/pii/B9780128042984000022
Switch-mode DC/DC converters
Keng C. Wu, in Power Electronic System Design, 2021
9.14 Close loop—digital
So far, the key controller; which is the error amplifier identified as, for instance, EA(s) in Fig. 9.66; remains entirely in analog forms using analog integrated circuits and passive RC components. This fact had also held true for decades covering the invention of black/white TV, color TV, audio cassette tape, VCR, etc. and later improvements of those products. Then, perhaps in early 1980s, devices with discrete recording and readout, not digital yet, began to show up. Discrete signal is basically just a sampled, discontinuous staircase approximation of its analog counterpart. While a true digital signal further represents each and every discrete sample in stream of binary 0/1 format including synchronization, identification, data, encryption, action, error correction, etc. With the advance of understanding in digital signal processing starting in early 1970s and mostly limited to post processing, instead of real time, early 1980s also saw some bright minds beginning to probe the possibility of digital filter and control for power converters. However, after almost 40 years, the progress is far from satisfactory. As late as 2017, published material discussing power processing with digital feedback still carried significant misconceptions, or errors.
On Oct. 26, 2017, at the invitation of Electronic Design, Penton Publication (On-Line version), this author published “A Step-by-Step Primer on Digital Power-Supply Design”; [http://www.electronicdesign.com/power/step-step-primer-digital-power-supply-design].
Considering the article length and the standing alone nature, it is included as an appendix; Appendix I.
Read full chapter
URL:
https://www.sciencedirect.com/science/article/pii/B9780323885423000030
LT1070 design manual
Carl Nelson, in Analog Circuit Design, 2011
Feedback pin
The feedback pin is the inverting input to a single stage error amplifier. The noninverting input to this amplifier is internally tied to a 1.244V reference as shown in Figure 5.4.

Figure 5.4.
Input bias current of the amplifier is typically 350nA with the output of the amplifier in its linear region. The amplifier is a gm type, meaning that it has high output impedance with controlled voltage-to-current gain (gm ≈ 4400μmhos). DC voltage gain with no load is ≈ 800.
The feedback pin has a second function; it is used to program the LT1070 for normal or flyback-regulated operation (see description of block diagram). In Figure 5.4, Q53 is biased with a base voltage approximately 1V. This clamps the feedback pin to about 0.4V when current is drawn out of the pin. A current of ≈10μA or higher through Q53 forces the regulator to switch from normal operation to flyback mode, but this threshold current can vary from 3μA to 30μA. The LT1070 is in flyback mode during normal start-up until the feedback pin rises above 0.45V. The resistor divider used to set output voltage will draw current out of the feedback pin until the output voltage is up to about 33% of its regulated value.
If it is desired to run the LT1070 in the fully isolated flyback mode, a single resistor is tied from the feedback pin to ground. The feedback pin then sits at a voltage of ≈ 0.4V for R = 8.2k. The actual voltage depends on resistor value since the feedback pin has about 200Ω output impedance in this mode. 500μA in the resistor will drop the feedback pin voltage from 0.4V to 0.3V. Minimum current through the resistor to guarantee flyback operation is 50μA. Actual resistor value is chosen to fine-trim flyback regulated voltage. (See discussion of isolated flyback mode operation and graphs of feedback pin characteristics.)
An internal 30Ω resistor and 5.6V Zener protect the feedback pin from overvoltage stress. Maximum transient voltage is ±15V. This high transient condition most commonly occurs during fast fall time output shorts if a feedforward capacitor is used around the feedback divider. If a feedforward capacitor is used for DC output voltages greater than 15V, a resistor equal to VOUT/20mA should be used between the divider node and the feedback pin as shown in Figure 5.5.

Figure 5.5.
Keep in mind when using the LT1070 that the feedback pin reference voltage is referred to the ground pin of the regulator, and the ground pin can have switch currents exceeding 5A. Any resistance in the ground pin connection will degrade load regulation. Best regulation is obtained by tying the grounded end of the feedback divider directly to the ground pin of the LT1070, as a separate connection from the power ground. This limits output voltage errors to just the drop across the ground pin resistance instead of multiplying it by the feedback divider ratio. See discussion of ground pin.
Read full chapter
URL:
https://www.sciencedirect.com/science/article/pii/B9780123851857000056
Space Interference
Reinaldo Perez, in Wireless Communications Design Handbook, 1998
4.6.7.2 Transient Effects in SMPSs
In the simplified circuit of a switching-mode power supply, an error amplifier compares output voltage Vout with a reference Vref and controls the duty cycle, D, via a pulse width modulator as shown in Figure 4.32. The output capacitor Cout is represented by its equivalent circuit that includes the equivalent series resistance (ESR) and the equivalent series inductance (ESL). When we have a load step δI, current through the choke inductance L cannot be instantly changed. There will always be a finite time t needed for L to accommodate δI, given by the expression

Figure 4.32. Simplified diagram of an SMPS with output capacitor model (ESR & ESL).
(4.10)t>LδIVinDmax−Vout−Vdiode,
where Dmax is the maximum duty cycle and Vdiode is the diode’s voltage drop. The choke current Ichoke slews to the new load current, but before it does that Iload flows through Cout. This results in an output voltage deviation δVout that may be as much as
(4.11)δVout≤ESLdIloaddt+ESRδI,
where dIload/dt is the load’s current slew rate (A/sec).The SMPS’s Cout acts as a reservoir for these current transients. The delay that is observed is compounded by the wiring and possible long traces in the PCB. As can be observed in Figure 4.32, traces have self-inductances and resistances, and when Iload changes from Faraday’s law, Lwire/trace will cause an initial voltage deviation δV given by
(4.12)δV=−Lwire/tracesdIloaddt.
Furthermore, Rwire/trace will cause an input voltage drop as Iload slews. The time that is needed to change a current through load wires/traces in a PCB is given by
(4.13)t=tdelay+trise,
where tdelay is the SMPS delay time and trise is the time needed for Iwire/traces to catch up to the load current, given by
(4.14)trise=tdelaydIload/dtVmax−VloadLwire/trace−dIloaddt
where Vmax is the maximum output voltage during the transient recovery of the supply. The output load will experience a dip of as much as
(4.15)δVout=ESRtdIloaddt+t2dIload/dtCload.
A computer simulation of a circuit of the type shown in Figure 4.32 using SPICE can show the effects of load wire/traces, inductances, and external capacitance, as shown in Figure 4.33.

Figure 4.33. Load transients resulting from modeling output loads of an SMPS.
Read full chapter
URL:
https://www.sciencedirect.com/science/article/pii/S1874610199800179
Theoritical considerations for buck mode switching regulators
Carl Nelson, in Analog Circuit Design, 2013
Error Amplifier
The error amplifier in Figure 11 is a single stage design with added inverters to allow the output to swing above and below the common mode input voltage. One side of the amplifier is tied to a trimmed internal reference voltage of 2.21V. The other input is brought out as the FB (feedback) pin. This amplifier has a GM (voltage in to current out) transfer function of ∼5000μmho. Voltage gain is determined by multiplying GM times the total equivalent output loading, consisting of the output resistance of Q4 and Q6 in parallel with the series RC external frequency compensation network. At DC, the external RC is ignored, and with a parallel output impedance for Q4 and Q6 of 400kΩ, voltage gain is ≈2000. At frequencies above a few hertz, voltage gain is determined by the external compensation, RC and CC.
Figure 11. Error Amplifier
AV=Gm2π•f•CCat mid-frequenciesAV=Gm•RCat high frequencies
Phase shift from the FB pin to the VC pin is 90° at mid-frequencies where the external CC is controlling gain, then drops back to 0° (actually 180° since FB is an inverting input) when the reactance of CC is small compared to RC. The low frequency “pole” where the reactance of CC is equal to the output impedance of Q4 and Q6 (r0), is:
FPOLE=12π•r0•Cr0≈400kΩ
Although fPOLE varies as much as 3:1 due to r0 variations, mid-frequency gain is dependent only on GM, which is specified much tighter on the data sheet. The higher frequency “zero” is determined solely by RC and CC:
fZERO=12π•RC•CC
The error amplifier has asymmetrical peak output current. Q3 and Q4 current mirrors are unity gain, but the Q6 mirror has a gain of 1.8 at output null and a gain of 8 when the FB pin is high (Q1 current = 0). This results in a maximum positive output current of 140μA and a maximum negative (sink) output current of =1.1mA. The asymmetry is deliberate—it results in much less regulator output overshoot during rapid start-up or following the release of an output overload. Amplifier offset is kept low by area scaling Q1 and Q2 at 1.8:1.
Amplifier swing is limited by the internal 5.8V supply for positive outputs and by D1 and D2 when the output goes low. Low clamp voltage is approximately one diode drop (−0.7V – 2mV/°C).
Note that both the FB pin and the VC pin have other internal connections. Refer to the frequency shifting and synchronizing discussions.
Read full chapter
URL:
https://www.sciencedirect.com/science/article/pii/B9780123978882000055
Linear regulator
Keng C. Wu, in Power Electronic System Design, 2021
8.1.1.1 Open loop
Surrounding the error amplifier and the output feedback divider, R1 and R2, the inverting input node, Vn, and the noninverting node, Vp, voltages are
(8.1)Vn=R2R1+R2Vo+Vos+R1R2R1+R2Ib,Vp=Vref
The error amplifier output therefore gives
(8.2)V2=A(Vp−Vn)=A(Vref−R2R1+R2Vo−Vos−R1R2R1+R2Ib)
The base-emitter loop of transistor Q1 gives
(8.3)R3IB1+Vbe1+R4(1+hFE1)IB1=V2,approximationIB1=ISeV2−[R3+(1+hFE1)R4]IB1VT,exact
The exact expression invokes transistor p-n junction saturation current, Is, and thermal voltage, VT.
In other words, the Q1 base current (approximation) is
(8.4)IB1=V2−Vbe1R3+R4(1+hFE1)=A(Vref−R2R1+R2Vo−Vos−R1R2R1+R2Ib)−Vbe1R3+R4(1+hFE1)
And the Q2 base current (approximation) is
(8.5)IB2=hFE1IB1−Vbe2R5=hFE1A(Vref−R2R1+R2Vo−Vos−R1R2R1+R2Ib)−Vbe1R3+R4(1+hFE1)−Vbe2R5
Clearly, the output voltage is translated to a control current that is responsible for regulating the output given a known reference, Vref. This concludes the first part.
The other part, power train, yields
(8.6)Vo=(R1+R2)RLR1+R2+RLIC2=(R1+R2)RLR1+R2+RLhFE2·IB2Vi=Vce+Vo
where Vce is the collector-to-emitter drop.
Read full chapter
URL:
https://www.sciencedirect.com/science/article/pii/B9780323885423000017
Current-Fed Converter
Keng Wu, in Power Converters with Digital Filter Feedback Control, 2016
10.5 I-fed converter with digital control
The analog error amplifier identified in Section 10.3, following the modulator gain evaluation, is transformed to the z-domain with a bilinear transformation constant C = 2 MHz (converter switching frequency 100 kHz, sampling frequency 1 MHz, transform constant = twice of sampling). The resulting z-domain digital filter function is in the form of (1.23) with these coefficients,
a0=7.451×10−4a1=−7.337×10−4a2=−7.451×10−4a3=7.338×10−4 b1=−2.959b2=2.919b3=−0.96
Figure 10.7a–d shows the SIMULINK schematic with digital filter and performance in time domain.
Figure 10.7. SIMULINK Schematic with Digital Filter.
(a) Inductor current, (b) secondary current, (c) output voltage, and (d) input current.
Read full chapter
URL:
https://www.sciencedirect.com/science/article/pii/B9780128042984000101
Feedback Loop Analysis and Stability
Sanjaya Maniktala, in Switching Power Supplies A — Z (Second Edition), 2012
Pulse-Width Modulator Transfer Function
The output of the error amplifier (sometimes called “COMP,” sometimes “EA-out,” sometimes “control voltage”) is applied to one of the inputs of the PWM comparator. This is the terminal marked “Control” in Figures 12.9 and 12.10. On the other input of this PWM comparator, we apply a sawtooth voltage ramp — either internally generated from the clock when using “voltage-mode control,” or derived from the current ramp when using “current-mode control” (explained later). Thereafter, by standard comparator action, we get pulses of desired width with which to drive the switch.
Since the feedback signal coming from the output rail of the power supply goes to the inverting input of the error amplifier, if the output is below the set regulation level, the output of the error amplifier goes high. This causes the PWM to increase the pulse width (duty cycle) and thus try to make the output voltage rise. Similarly, if the output of the power supply goes above its set value, the error amplifier output goes low, causing the duty cycle to decrease (see upper third of Figure 12.11).
As mentioned previously, the output of the PWM stage is duty cycle, and its input is the “control voltage” or the “EA-out.” So, as we said, the gain of this stage is not a dimensionless quantity, but has units of 1/V. From the middle of Figure 12.11, we can see that this gain is equal to 1/VRAMP, where VRAMP is the peak-to-peak amplitude of the ramp sawtooth.
Read full chapter
URL:
https://www.sciencedirect.com/science/article/pii/B9780123865335000127
DCM Boost Converter with Voltage-Mode Control
Keng Wu, in Power Converters with Digital Filter Feedback Control, 2016
7.6 Conversion to digital control
We now want to convert the analog error amplifier, EA(s), identified in Section 7.4, to its digital equivalent H(z). It turns out that some property not well understood, at least to this author, exists. From the EA(ω) plot in frequency domain, 100 kHz sampling was thought to be a good choice, but it ends up having a frequency response, H(ω), that is utterly incompatible as shown in Figure 7.8, with the analog version.
Figure 7.8. Incompatible Digital Filter Sampled at 100 kHz.
Increasing the sampling frequency to 300 kHz improves matching, Figure 7.9, with losses in high frequency.
Figure 7.9. Improved Matching at 300 kHz Sampling.
Increasing the sampling frequency further to 800 kHz improves more, Figure 7.10, but further increase to 900 kHz makes it worse. We therefore settle for sampling at 800 kHz.
Figure 7.10. Better Matching at High Frequency with 800 kHz Sampling.
At 800 kHz sampling, the polynomial coefficients for the corresponding HII(z), (1.19), is given as,
a0=5.392×10−3a1=38.663×10−6a2=−5.353×10−3 b1=−1.991×10−0b2=991.465×10−3
With the digital filter identified, Figure 7.1 is transformed to its digital control version, Figure 7.11. The digital filter is also proved to be stable, Figure 7.12, with poles within the unit circle of z-plane.
Figure 7.11. Boost Converter with Digital Filter in Feedback Loop.
Figure 7.12. Digital Filter is Stable.
Read full chapter
URL:
https://www.sciencedirect.com/science/article/pii/B9780128042984000071
Forward Converter with Voltage-Mode Control
Keng Wu, in Power Converters with Digital Filter Feedback Control, 2016
1.7 Other approaches and considerations
In the process of converting an analog error amplifier to digital in Section 1.4, the bilinear transform was invoked. The transform is considered valid, based on the fact of acceptable mathematical approximation alone. It does not take into consideration its physical significance. Briefly, in particular the choice of constant C, there were many choices, none perfect. One approach attempts to match both at a single, chosen frequency. In another, the responses of both versions across a low frequency band are made almost equal. Both efforts set an eye on the performance in the frequency domain. There are alternatives, of course, and that is changing the focus to the time domain. One is called impulse invariance method. It implies that the impulse response of a digital filter is forced to be identical to the impulse of its analog counterpart. It is basically a procedural matter that does not require cumbersome theoretical support. We outline only the process here and will give a demonstration later in an example.
Three steps are called for in the impulse invariance method. Step one takes the inverse Laplace transform of the analog compensator function (inverting sign excluded), identified by way of Section 1.3. This yields the time-domain impulse response of the corresponding analog amplifier. Step two takes z-transform of the impulse response function in the time domain. Then the last step follows by arranging the z-domain function in the form of (1.24).
In the analog world, circuit operations and performances are sensitive to the value of components. Digital filters obtained through the above fare even worse by the fact of (1.17), (1.19), (1.20), and (1.23). The performance of a digital filter is extremely sensitive to the coefficients of its numerator and denominator polynomial. Readers are strongly advised to retain coefficients’ numerical precision to at the least 10 decimal places.
The last, but not the least, concern is the local stability of the compensator. Poles of HII(z) in (1.19), HIII(z) in (1.23), or in general, H(z) of (1.24), must lie within the unit circle in the z-plane. We will see to it in the example to follow.
Read full chapter
URL:
https://www.sciencedirect.com/science/article/pii/B9780128042984000010
Forward Converter with Current-Mode Control
Keng Wu, in Power Converters with Digital Filter Feedback Control, 2016
2.5 Matlab SIMULINK simulation
In both Figures 2.1 and 2.2, a type-III error amplifier was employed for demonstration purpose as well as for a 60°-phase margin. It turns out that if the desired phase margin is reduced to 45° at the same crossover frequency of 10 kHz, a type-II error amplifier with two less components can perform just as well for current-mode control. The reader is invited to confirm, with R1a = 2K preselected, C1a = 0.0029 μF, C2a = 0.009 μF, and R2a = 3.6K. In the depictedSIMULINK models, type-II error amplifiers are shown. Figure 2.12 gives a physical device model and Figure 2.12a–h present simulation plots. Figure 2.13 replaces the physical model with continuous transfer function H(s), while Figure 2.14 plugs in the corresponding digital filter.
Figure 2.12. SIMULINK Model with Error Amp Represented by Physical Device.
(a) Output voltage, (b) error voltage, (c) D1 and D2 cathode, (d) input current, (e) switch current, (f) inductor current, (g) D1 current, (h) D2 current.
Figure 2.13. SIMULINK Model with Error Amp in H(s) Form.
(a) Output voltage. (b) error voltage. (c) D1 and D2 cathode. (d) input current. (e) switch current. (f) inductor current. (g) D1 current. (h) D2 current.
Figure 2.14. SIMULINK Model with Error Amp in Hz Form.
(a) Output voltage, (b) error voltage, (c) D1 and D2 cathode, (d) input current. (e) switch current, (f) inductor current, (g) D1 current, (h) D2 current.
Read full chapter
URL:
https://www.sciencedirect.com/science/article/pii/B9780128042984000022
Switch-mode DC/DC converters
Keng C. Wu, in Power Electronic System Design, 2021
9.14 Close loop—digital
So far, the key controller; which is the error amplifier identified as, for instance, EA(s) in Fig. 9.66; remains entirely in analog forms using analog integrated circuits and passive RC components. This fact had also held true for decades covering the invention of black/white TV, color TV, audio cassette tape, VCR, etc. and later improvements of those products. Then, perhaps in early 1980s, devices with discrete recording and readout, not digital yet, began to show up. Discrete signal is basically just a sampled, discontinuous staircase approximation of its analog counterpart. While a true digital signal further represents each and every discrete sample in stream of binary 0/1 format including synchronization, identification, data, encryption, action, error correction, etc. With the advance of understanding in digital signal processing starting in early 1970s and mostly limited to post processing, instead of real time, early 1980s also saw some bright minds beginning to probe the possibility of digital filter and control for power converters. However, after almost 40 years, the progress is far from satisfactory. As late as 2017, published material discussing power processing with digital feedback still carried significant misconceptions, or errors.
On Oct. 26, 2017, at the invitation of Electronic Design, Penton Publication (On-Line version), this author published “A Step-by-Step Primer on Digital Power-Supply Design”; [http://www.electronicdesign.com/power/step-step-primer-digital-power-supply-design].
Considering the article length and the standing alone nature, it is included as an appendix; Appendix I.
Read full chapter
URL:
https://www.sciencedirect.com/science/article/pii/B9780323885423000030
LT1070 design manual
Carl Nelson, in Analog Circuit Design, 2011
Feedback pin
The feedback pin is the inverting input to a single stage error amplifier. The noninverting input to this amplifier is internally tied to a 1.244V reference as shown in Figure 5.4.
Figure 5.4.
Input bias current of the amplifier is typically 350nA with the output of the amplifier in its linear region. The amplifier is a gm type, meaning that it has high output impedance with controlled voltage-to-current gain (gm ≈ 4400μmhos). DC voltage gain with no load is ≈ 800.
The feedback pin has a second function; it is used to program the LT1070 for normal or flyback-regulated operation (see description of block diagram). In Figure 5.4, Q53 is biased with a base voltage approximately 1V. This clamps the feedback pin to about 0.4V when current is drawn out of the pin. A current of ≈10μA or higher through Q53 forces the regulator to switch from normal operation to flyback mode, but this threshold current can vary from 3μA to 30μA. The LT1070 is in flyback mode during normal start-up until the feedback pin rises above 0.45V. The resistor divider used to set output voltage will draw current out of the feedback pin until the output voltage is up to about 33% of its regulated value.
If it is desired to run the LT1070 in the fully isolated flyback mode, a single resistor is tied from the feedback pin to ground. The feedback pin then sits at a voltage of ≈ 0.4V for R = 8.2k. The actual voltage depends on resistor value since the feedback pin has about 200Ω output impedance in this mode. 500μA in the resistor will drop the feedback pin voltage from 0.4V to 0.3V. Minimum current through the resistor to guarantee flyback operation is 50μA. Actual resistor value is chosen to fine-trim flyback regulated voltage. (See discussion of isolated flyback mode operation and graphs of feedback pin characteristics.)
An internal 30Ω resistor and 5.6V Zener protect the feedback pin from overvoltage stress. Maximum transient voltage is ±15V. This high transient condition most commonly occurs during fast fall time output shorts if a feedforward capacitor is used around the feedback divider. If a feedforward capacitor is used for DC output voltages greater than 15V, a resistor equal to VOUT/20mA should be used between the divider node and the feedback pin as shown in Figure 5.5.
Figure 5.5.
Keep in mind when using the LT1070 that the feedback pin reference voltage is referred to the ground pin of the regulator, and the ground pin can have switch currents exceeding 5A. Any resistance in the ground pin connection will degrade load regulation. Best regulation is obtained by tying the grounded end of the feedback divider directly to the ground pin of the LT1070, as a separate connection from the power ground. This limits output voltage errors to just the drop across the ground pin resistance instead of multiplying it by the feedback divider ratio. See discussion of ground pin.
Read full chapter
URL:
https://www.sciencedirect.com/science/article/pii/B9780123851857000056
Space Interference
Reinaldo Perez, in Wireless Communications Design Handbook, 1998
4.6.7.2 Transient Effects in SMPSs
In the simplified circuit of a switching-mode power supply, an error amplifier compares output voltage Vout with a reference Vref and controls the duty cycle, D, via a pulse width modulator as shown in Figure 4.32. The output capacitor Cout is represented by its equivalent circuit that includes the equivalent series resistance (ESR) and the equivalent series inductance (ESL). When we have a load step δI, current through the choke inductance L cannot be instantly changed. There will always be a finite time t needed for L to accommodate δI, given by the expression
Figure 4.32. Simplified diagram of an SMPS with output capacitor model (ESR & ESL).
(4.10)t>LδIVinDmax−Vout−Vdiode,
where Dmax is the maximum duty cycle and Vdiode is the diode’s voltage drop. The choke current Ichoke slews to the new load current, but before it does that Iload flows through Cout. This results in an output voltage deviation δVout that may be as much as
(4.11)δVout≤ESLdIloaddt+ESRδI,
where dIload/dt is the load’s current slew rate (A/sec).The SMPS’s Cout acts as a reservoir for these current transients. The delay that is observed is compounded by the wiring and possible long traces in the PCB. As can be observed in Figure 4.32, traces have self-inductances and resistances, and when Iload changes from Faraday’s law, Lwire/trace will cause an initial voltage deviation δV given by
(4.12)δV=−Lwire/tracesdIloaddt.
Furthermore, Rwire/trace will cause an input voltage drop as Iload slews. The time that is needed to change a current through load wires/traces in a PCB is given by
(4.13)t=tdelay+trise,
where tdelay is the SMPS delay time and trise is the time needed for Iwire/traces to catch up to the load current, given by
(4.14)trise=tdelaydIload/dtVmax−VloadLwire/trace−dIloaddt
where Vmax is the maximum output voltage during the transient recovery of the supply. The output load will experience a dip of as much as
(4.15)δVout=ESRtdIloaddt+t2dIload/dtCload.
A computer simulation of a circuit of the type shown in Figure 4.32 using SPICE can show the effects of load wire/traces, inductances, and external capacitance, as shown in Figure 4.33.
Figure 4.33. Load transients resulting from modeling output loads of an SMPS.
Read full chapter
URL:
https://www.sciencedirect.com/science/article/pii/S1874610199800179