Ошибка
системы по задающему воздействию равна
![]()
,
а по
возмущению
![]()
т. е.
ошибка системы от возмущения численно
равна изменению регулируемой величины
под влиянием этого возмущения (при
отсутствии задающего воздействия).
Ввиду
наличия переходных процессов текущее
значение ошибки
![]()
резко меняется и не может служить мерой
точности автоматических систем. Поэтому
точность автоматических систем оценивают
величиной установившейся ошибки, которая
имеет место в устойчивой системе после
завершения переходного процесса.
Необходимо
установить, во-первых, как вычисляются
установившиеся ошибки и, во-вторых,
какие факторы влияют на эти ошибки. Обе
задачи решаются параллельно. Предварительно
отметим, что установившаяся ошибка
вычисляется для значения времени
![]()
,
т. е.
![]()
.
Величину
установившейся ошибки можно найти из
дифференциального уравнения системы,
однако ее значительно удобнее вычислять
при помощи передаточной функции ошибки
![]()
.
Следовательно,
![]()
.
Данная
формула позволяет найти изображение
ошибки. Для того чтобы найти ошибку как
функцию времени, необходимо сделать
обратное преобразование Лапласа:
![]()
,
откуда можно определить установившуюся
ошибку, положив
![]()
.
Рассмотренный
способ вычисления
![]()
не рационален. Применим теорему
операционного исчисления о конечном
значении функции. Эта теорема говорит
о том, что если известно изображение
![]()
функции
![]()
,
то конечное значение оригинала
![]()
можно вычислить по формуле
![]()
.
Применяя
эту формулу для решения нашей задачи,
получаем
![]()
(1)
Формула
(1) позволяет вычислить установившуюся
ошибку по задающему воздействию
.
Для определения установившейся ошибки
от возмущения
надо воспользоваться зависимостью
![]()
(2)
где
![]()
— передаточная функция по возмущению.
Таким
образом, из формул (1) и (2) следует, что
точность автоматических систем зависит,
во-первых, от внешнего воздействия
или
и, во-вторых, от свойств автоматической
системы, отображаемых передаточной
функцией
![]()
или
.
Задающие
и возмущающие воздействия являются
сложными функциями времени и поэтому
вычисление ошибок значительно усложняется.
Реальные воздействия заменяются
типовыми, в качестве которых применяют
ступенчатую
![]()
,
линейную
![]()
и квадратичную
![]()
функции. Все эти воздействия просто
выражаются при помощи формул; их значения
можно точно вычислить для любого момента
времени, ввиду чего они называются
детерминированными, или регулярными.
30 Вычисление ошибки от задающих воздействий
Учитывая
равенство (1), а также выражение для
передаточной функции ошибки
![]()
![]()
(3)
получим
формулу для вычисления ошибки от
задающего воздействия.
![]()
,
где
— передаточная функция разомкнутой
системы.
При
вычислении ошибок по формуле (3)
учитывается, что изображения по Лапласу
для типовых воздействий
![]()
,
![]()
,

— соответственно равны:
![]()
;
![]()
;
![]()
.
Кроме
того, для статистических систем
![]()
,
а для астатических систем 1-го и 2-го
порядков примем соответственно
![]()
и
![]()
,
при
этом
![]()
,
где k — коэффициент передачи разомкнутой
системы; W*(р) — передаточная функция
без учета интегрирующих звеньев и
коэффициента передачи.
Ошибки
некоторых автоматических систем
приведены в табл. 3. Анализ табл. 3
показывает, что статические системы
при ступенчатом воздействии имеют
установившуюся ошибку
![]()
, (4)
которая
называется статической, или ошибкой по
положению. Она пропорциональна величине
задающего воздействия и уменьшается с
увеличением коэффициента передачи
разомкнутой системы k.
Астатические
системы 1-го порядка принципиально точно
отрабатывают ступенчатое воздействие,
но имеют постоянную ошибку при отработке
линейно возрастающего сигнала (табл.
3). Эта ошибка
![]()
(5)
пропорциональна
скорости v изменения входного сигнала,
ввиду чего ее называют скоростной
ошибкой, а коэффициент передачи
разомкнутой системы k — добротностью
системы по скорости. Отсутствие
статической ошибки объясняется наличием
в одноцепочечной структурной схеме
системы интегрирующего звена.
Астатические
системы 2-го порядка принципиально точно
отрабатывают как ступенчатый, так и
линейно возрастающий сигнал. При
отработке квадратичного сигнала имеет
место ошибка
![]()
,
(6)
пропорциональная
ускорению а входного сигнала и обратно
пропорциональная коэффициенту усиления
разомкнутой системы k, который называется
добротностью системы по ускорению, а
сама ошибка — ошибкой системы по
ускорению.
Итак,
с увеличением коэффициента передачи
разомкнутой системы установившиеся
ошибки уменьшаются.
ранее
было показано, что, с увеличением k
ухудшается устойчивость автоматических
систем. Таким образом, требование к
точности противоречит требованию к
устойчивости. Далее будет рассмотрено,
что улучшение устойчивости при заданном
относительно большом значении k
достигается путем включения в систему
корректирующих устройств.
Чем
больше v, тем точнее система отрабатывает
более сложное воздействие и поэтому
следящие системы и системы управления
выполняют как астатические. Однако с
увеличением порядка астатизма САУ более
склонны к колебаниям в переходных
процессах, и их устойчивость ухудшается.
Поэтому системы с порядком астатизма
более двух на практике почти не
встречаются.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Лекция 17. Расчет установившейся ошибки в системах управления.
Структурные признаки астатизма
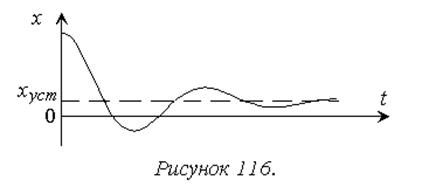
Установившейся (статической) ошибкой называют
постоянное значение сигнала ошибки x(t)=g(t)-y(t),
которое она приобретает по окончании переходного процесса: ![]() , рисунок 116.
, рисунок 116.
Очевидно, установившаяся ошибка зависит от законов
изменения и численных характеристик входных сигналов системы. Поэтому при ее
определении принято рассматривать так называемые типовые входные сигналы,
законы изменения которых составляют степенной ряд относительно времени.
Например, для задающего воздействия:
![]() ,
, ![]() ,
,  и так
и так
далее.
При наличии нескольких воздействий на линейную систему
для определения xуст используется
принцип суперпозиции – реакция линейной системы на совокупность входных
сигналов совпадает с алгебраической суммой ее реакций на каждый из сигналов в
отдельности:
 , где
, где
каждое слагаемое, или составляющая сигнала ошибки, ![]() определяется
определяется
для i-го входного сигнала при условии, что остальные
тождественно равны нулю. Такой подход полностью соответствует определению
передаточной функции и позволяет выполнять расчет установившейся ошибки на
основе структурной схемы системы.
Рассмотрим порядок расчета установившейся ошибки на
следующем достаточно общем примере (рисунок 117).
В соответствии с принципом суперпозиции установившаяся
ошибка будет определяться здесь в виде суммы трех составляющих ![]() .
.
Изображение по Лапласу ошибки от задающего воздействия
получают через передаточную функцию замкнутой системы по ошибке ![]() при известном изображении задающего
при известном изображении задающего
воздействия G(s):
![]() , где
, где
F(s) – основная передаточная функция замкнутой системы.
Для структурной схемы на рисунке 117
 , где
, где ![]() — передаточная функция
— передаточная функция
разомкнутой системы, или прямой цепи системы, для рассматриваемого примера.
Непосредственно для расчета
установившегося значения ошибки от задающего воздействия используют теорему о
конечном значении для преобразования Лапласа:
![]()
В результате:
 .
.
Изображение по Лапласу ошибки от возмущающего
воздействия получают через передаточную функцию замкнутой системы по ошибке от
возмущения ![]() при известном изображении возмущающего
при известном изображении возмущающего
воздействия F(s):
![]() , где
, где
Ff(s) –передаточная функция замкнутой системы по
возмущающему воздействию,
 ;
;
Wf(s)
– передаточная функция разомкнутой системы по возмущению (передаточная функция
участка прямой цепи системы от точки приложения возмущающего воздействия до
выхода системы).
Для структурной схемы на рисунке 8 необходимо
учитывать два возмущающих воздействия, приложенные в различные точки системы.
Для f1:
![]() ,
,
 ,
,
 .
.
Для f2:
![]() ,
,
 ,
,
 .
.
Расчет упрощается для
системы с единичной отрицательной обратной связью (рисунок 118):
 ,
,
 , где k=k1k2k3 – коэффициент передачи
, где k=k1k2k3 – коэффициент передачи
разомкнутой системы.
Найдем установившуюся ошибку
для некоторых типовых вариантов задающего воздействия.
При ![]() получим:
получим:
![]()
 .
.
При ![]() получим:
получим:
 .
.
При получим:
 .
.
Если установившаяся ошибка
тождественно равна нулю при каком-либо типовом варианте входного сигнала,
независимо от его численных характеристик, систему называют астатической по
рассматриваемому входному сигналу.
Количество типовых вариантов
входного сигнала – членов степенного ряда, при которых установившаяся ошибка
тождественно равна нулю, определяет порядок астатизма.
Рассматриваемая система
обладает свойством астатизма второго порядка по задающему воздействию.
Рассмотрим установившуюся
ошибку от возмущения f1:
 ,
,
 , где
, где ![]() –
–
коэффициент передачи разомкнутой системы по возмущению f1.
При ![]() получим:
получим:

 .
.
При ![]() получим:
получим:
 .
.
При  получим
получим
тот же результат.
Отметим, что по возмущению f1 рассматриваемая система
не является астатической. Кроме того, она не в состоянии отработать два последних
варианта входного сигнала.
Рассмотрим установившуюся
ошибку от возмущения f2:
 ,
,
 , где
, где ![]() –
–
коэффициент передачи разомкнутой системы по возмущению f2.
При ![]() получим:
получим:

 .
.
При ![]() получим:
получим:
 .
.
При  получим:
получим:
 .
.
По возмущению f2 рассматриваемая система имеет
астатизм первого порядка. Она не в состоянии отработать возмущающее
воздействие, изменяющееся во времени с постоянным ускорением.
Подведем некоторые итоги:
1. Наличие и глубина
свойства астатизма зависят от точки приложения входного сигнала.
2. Постоянные времени
звеньев системы не влияют на ее точность.
3. Увеличение значения
коэффициента передачи разомкнутой системы приводит к снижению величины
установившейся ошибки.
Для систем с единичной
отрицательной обратной связью существуют достаточно простые структурные
признаки астатизма.
Рассмотрим структуру,
показанную на рисунке 119.
В общем случае передаточная
функция разомкнутой системы может быть представлена в следующей форме:
 , где l³0.
, где l³0.
Тогда получим:

и для общего вида задающего воздействия  , которому соответствует изображение
, которому соответствует изображение  ,
,
 .
.
Результат нахождения этого
предела зависит от соотношения показателей степени:
— при l>v установившаяся
ошибка равна нулю независимо от остальных параметров, то есть имеет место
астатизм;
— при l=v получаем
константу;
— при l<v установившаяся
ошибка стремится к бесконечности, то есть система не в состоянии отработать
входной сигнал.
Учитывая, что минимальное
значение v нулевое,
получаем условие астатизма по задающему воздействию: l>0.
Таким образом, структурный
признак астатизма по задающему воздействию в системе с единичной отрицательной
обратной связью состоит в наличии нулевых корней в знаменателе передаточной
функции разомкнутой системы, или интегрирующих звеньев в прямой цепи системы.
Нетрудно также убедиться,
что положительное значение l совпадает
с порядком астатизма.
Для получения признака
астатизма по возмущающему воздействию представим передаточные функции на
рисунке 10 в форме:
 ,
,
 , где l1+l2=l,
, где l1+l2=l,
k1k2=k, m1+m2=m,
n1+n2=n,
причем ![]() и
и ![]() .
.
Тогда получим:

и для общего вида возмущающего воздействия  , которому соответствует изображение
, которому соответствует изображение  ,
,
 .
.
Все вышеприведенные выводы
можно повторить для показателя степени l1.
Таким образом, структурный
признак астатизма по возмущающему воздействию в системе с единичной
отрицательной обратной связью состоит в наличии нулевых корней в знаменателе
передаточной функции участка системы до точки приложения воздействия, или
интегрирующих звеньев на том же участке.
Ошибки САУ в установившихся режимах
Ранее была определена ошибка системы в установившемся режиме при подаче на ее вход задающего воздействия в виде ступенчатой функции, у которой первая и производные более высокого порядка в установившемся режиме равны нулю. Однако на практике задающее воздействие а  может быть различной функцией времени, содержащей первую производную, равную скорости изменения задающего воздействия, вторую производную, равную ускорению воздействия, и производные более высокого порядка. Так, задающее воздействие, изменяющееся по закону
может быть различной функцией времени, содержащей первую производную, равную скорости изменения задающего воздействия, вторую производную, равную ускорению воздействия, и производные более высокого порядка. Так, задающее воздействие, изменяющееся по закону  (рис. 2.10, а), где
(рис. 2.10, а), где  — начальное значение (скачок) а
— начальное значение (скачок) а  имеет первую производную
имеет первую производную  которая при
которая при  изменяется скачком (рис. 2.10, б). Вторая производная от а
изменяется скачком (рис. 2.10, б). Вторая производная от а  равна нулю. Такой закон изменения задающего воздействия встречается, например, в режиме захвата цели системой автосопровождения. В этом случае
равна нулю. Такой закон изменения задающего воздействия встречается, например, в режиме захвата цели системой автосопровождения. В этом случае  — начальное значение координаты цели (начальное рассогласование),
— начальное значение координаты цели (начальное рассогласование),  — скорость цели.
— скорость цели.
В общем случае задающее воздействие  может содержать
может содержать  производных и представлено в виде полинома от времени
производных и представлено в виде полинома от времени 

где  — начальное значение задающего воздействия;
— начальное значение задающего воздействия;  — начальные значения от первой до
— начальные значения от первой до

Рис. 2.10. Задающее воздействие, изменяющееся по закону  (а) и его первая производная (б).
(а) и его первая производная (б).
 производных задающего воздействия;
производных задающего воздействия;  значение
значение  производной задающего воздействия.
производной задающего воздействия.
Найдем общее выражение для ошибки системы с астатизмом  порядка в установившемся режиме при задающем воздействии, имеющем
порядка в установившемся режиме при задающем воздействии, имеющем  производных.
производных.
Для этого запишем изображение задающего воздействия

и передаточную функцию по ошибке системы с астатизмом  порядка
порядка

Подставив значение  из формулы (2.71) в формулу (2.65), имеем
из формулы (2.71) в формулу (2.65), имеем

После подстановки в эту формулу значения а  из формулы
из формулы  получаем общее выражение для установившейся ошибки
получаем общее выражение для установившейся ошибки 

Из этого выражения получаем следующее.
1. Если  то вауст
то вауст  если порядок астатизма системы больше, чем порядок высшей производной задающего воздействия, то ошибка системы в установившемся режиме равна нулю.
если порядок астатизма системы больше, чем порядок высшей производной задающего воздействия, то ошибка системы в установившемся режиме равна нулю.
2. Если  то
то  т. е. если порядок астатизма системы равен порядку высшей производной задающего воздействия, то ошибка системы в установившемся режиме будет иметь определенное значение. Эта ошибка, как видно из выражения (2.73) и последнего выражения, будет вызываться действием только высшей производной задающего воздействия. Составляющие же ошибки от других производных задающего воздействия и начального скачка самого воздействия в этом случае равны нулю.
т. е. если порядок астатизма системы равен порядку высшей производной задающего воздействия, то ошибка системы в установившемся режиме будет иметь определенное значение. Эта ошибка, как видно из выражения (2.73) и последнего выражения, будет вызываться действием только высшей производной задающего воздействия. Составляющие же ошибки от других производных задающего воздействия и начального скачка самого воздействия в этом случае равны нулю.
3. Если  то
то  т. е. если порядок астатизма системы ниже, чем порядок высшей производной задающего воздействия,
т. е. если порядок астатизма системы ниже, чем порядок высшей производной задающего воздействия,  то ошибка системы с течением времени будет увеличиваться до бесконечности.
то ошибка системы с течением времени будет увеличиваться до бесконечности.
Следует различать статический установившийся режим, когда задающее воздействие не изменяется во времени, и динамический установившийся режим, когда  производная от задающего воздействия есть величина постоянная. Например, в следящей системе режимы равномерного (когда первая производная
производная от задающего воздействия есть величина постоянная. Например, в следящей системе режимы равномерного (когда первая производная  равноускоренного (вторая производная
равноускоренного (вторая производная  вращений ведущего
вращений ведущего  вала являются динамическими установившимися режимами. В соответствии с этим различают статические и динамические установившиеся ошибки системы. Ошибки, возникающие при статическом установившемся режиме, называются статическими, а при динамическом установившемся режиме — динамическими.
вала являются динамическими установившимися режимами. В соответствии с этим различают статические и динамические установившиеся ошибки системы. Ошибки, возникающие при статическом установившемся режиме, называются статическими, а при динамическом установившемся режиме — динамическими.